Заявляемое устройство относится к области робототехники и может быть использовано как в качестве транспортного средства, так и в качестве игрушки.
Из предшествующего уровня техники известна двухосная тележка, содержащая платформу, установленную на поворотных вокруг вертикальных осей колесных тележках, к которым прикреплены дышла, обращенные в разные стороны, при этом на торцах платформы выполнены пазы, дышла установлены на тележках с возможностью поочередного продольного выдвижения и стопорения в рабочих положениях и выполнены с Г-образными концами с возможностью их поочередного захода в пазы платформы для стопорения соответствующей колесной тележки от поворота (см. А.С. СССР №1641693, опубл. 15.04.1991 в Бюллетене изобретений №14, 1991 г.). Данное устройство имеет сложную конструкцию. Кроме того, оно не приспособлено для самостоятельного перемещения.
Наиболее близким к заявленному техническому решению является двухосная тележка, содержащая раму с передним и задним мостами, причем передний мост закреплен на раме посредством поворотного шкворня, а колеса переднего моста могут проходить под рамой (см. А.С. СССР №119802, опубл. в «Бюллетене изобретений» №7 за 1959 г.). Данное устройство также не приспособлено для самостоятельного перемещения и в качестве игрушки не обладает достаточной занимательностью.
Задача, на решение которой направлено заявленное техническое решение, заключается в расширении эксплуатационных свойств тележки за счет обеспечения возможности управления ее перемещением, а также, при использовании в качестве игрушки, повышении уровня занимательности.
Техническим результатом, который обеспечивается приведенной совокупностью признаков, является обеспечение возможности управления перемещением тележки по заданной, в том числе, и сложной, траектории за счет комбинационной оптимизации конструктивного исполнения элементов тележки. Тем самым также достигается расширение эксплуатационных свойств тележки, которая может быть использована, например, в качестве игрушки.
Поставленная задача решается тем, что робот-тележка содержит раму с передним и задним мостами, снабженными колесами, при этом передний мост закреплен на раме посредством поворотного шкворня, при этом робот снабжен установленными на раме реверсивным электродвигателем, выполненным с возможностью дистанционного управления, блоком дистанционного управления электродвигателем и блоком питания, при этом ротор электродвигателя соединен с поворотным шкворнем переднего моста, а колеса переднего моста установлены с возможностью вращения только в одном направлении, при этом каждое колесо снабжено пассивным независимым тормозом.
В частном случае исполнения, колеса переднего моста могут быть установлены под рамой.
Благодаря тому, что на раме установлен дистанционно управляемый реверсивный электродвигатель, статор которого жестко связан с рамой, а ротор соединен со шкворнем переднего моста, при этом колеса переднего моста установлены с возможностью вращения только в одном направлении и каждое из них снабжено пассивным независимым, например, роллерным тормозом, появляется возможность управления перемещением тележки по заданной траектории.
Установка колес переднего моста под рамой расширяет возможности управления и позволяет совершать движение тележки не только вперед, но и назад.
Кроме того, тележка может двигаться зигзагами по сложной траектории. При наличии только одного двигателя, тележка может перемещаться вперед и назад, а также поворачивать как направо, так и налево. Управление тележкой может осуществляться дистанционно, оно не требует каких-либо знаний и навыков и доступно для детей практически любого возраста, в том числе для детей с ограниченными возможностями.
Устройство поясняется прилагаемыми изображениями, где
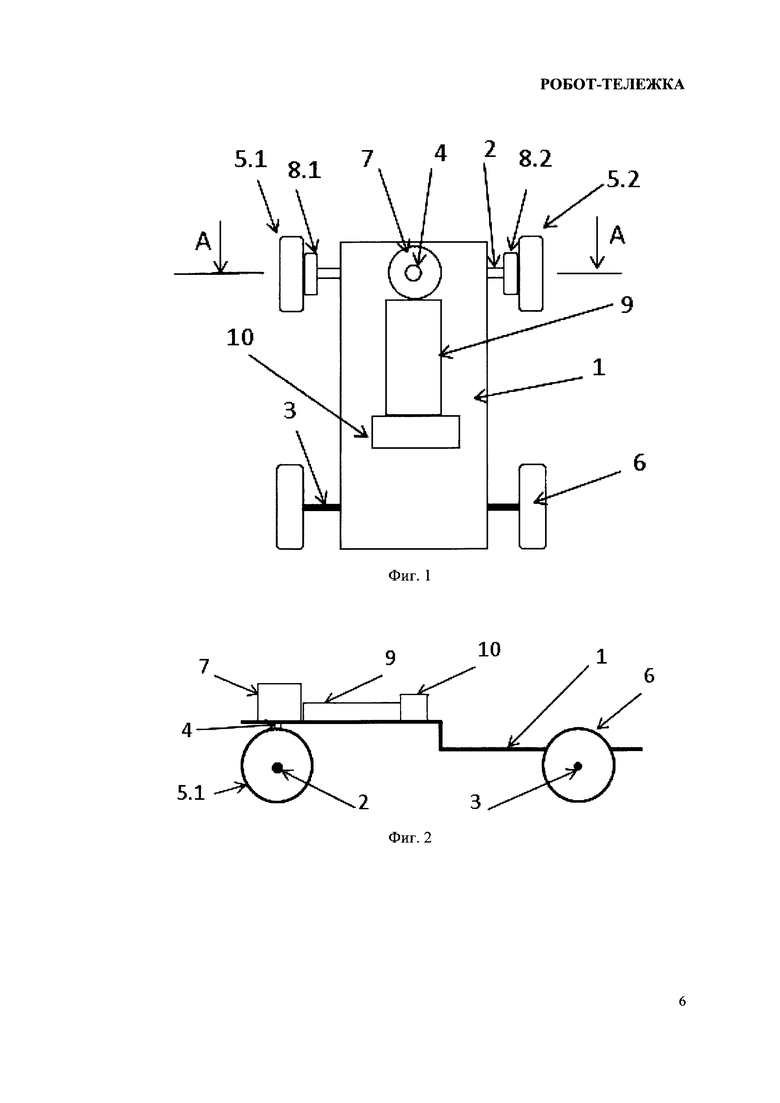
на фиг. 1 схематично показан вид робота-тележки сверху,
на фиг. 2 - вид робота-тележки сбоку в частном случае исполнения, когда колеса переднего моста установлены под рамой,
на фиг. 3 - разрез по сечению А-А фигуры, изображенной на фиг. 1.
Робот-тележка содержит раму 1 с передним 2 и задним 3 мостами. Передний мост 2 закреплен на раме 1 посредством поворотного шкворня 4. На переднем мосту установлены колеса 5.1 и 5.2, которые при повороте моста 2 могут проходить под рамой 1. На заднем мосту 3 установлены задние колеса 6. На раме 1 установлен дистанционно управляемый реверсивный электродвигатель 7, ротор которого посредством, например, понижающей передачи (на фигурах не показано), соединен со шкворнем 4 переднего моста 2. Колеса 5.1 и 5.2 переднего моста 2 установлены с возможностью вращения только в одном направлении, например, по часовой стрелке, и каждое из них снабжено пассивным независимым, например роллерным, тормозом: колесо 5.1 - тормозом 8.1, а колесо 5.2 - тормозом 8.2. На платформе установлены блок дистанционного управления электродвигателем 9 и блок питания 10.
Устройство работает следующим образом.
Робот-тележку включают посредством обеспечения питания электродвигателя, например, от автономного блока питания (аккумуляторная батарея). Осуществляя управление электродвигателем, тележку приводят в движение.
Допустим, что при помощи реверсивного двигателя 7 передний мост 2 тележки поворачивается относительно рамы 1 против часовой стрелки (если смотреть на тележку сверху) на некоторый угол относительно продольной оси рамы 1. Левое переднее колесо 5.1 в процессе такого поворота переднего моста 2 не может катиться назад из-за наличия на нем соответствующего тормоза 8.1, например роллерного; при этом левое переднее колесо 5.1 остается на месте, касаясь опорной плоскости в одной и той же точке и поворачивается, вместе с мостом 2, вокруг вертикальной оси против часовой стрелки. Правое же колесо 5.2 в процессе такого поворота переднего моста 2 катится вперед и тянет за собой раму 1 тележки, которая катится вперед на этом колесе 5.2 и на задних колесах 6. Допустим теперь, что после окончания описанного поворота передний мост 2 тележки при помощи реверсивного двигателя 7 поворачивается по часовой стрелке и образует, по окончании этого поворота, с продольной осью рамы 1 тележки такой же (по абсолютной величине) угол, что и при первом повороте переднего моста 2. Правое переднее колесо 5.2 в процессе такого поворота переднего моста 2 не может катиться назад из-за наличия на нем соответствующего тормоза 8.2, например роллерного; при этом правое колесо 5.2 остается на месте, касаясь опорной плоскости в одной и той же точке и поворачивается, вместе с мостом 2, вокруг вертикальной оси по часовой стрелке. Левое же колесо 5.1 при таком повороте переднего моста 2 катится вперед и тянет за собой раму 1 тележки, которая катится вперед на этом переднем колесе 5.1 и на задних колесах 6. Таким образом, тележка может перемещаться вперед, совершая зигзагообразные движения. Чем меньше углы поворота переднего моста 2 относительно платформы 1, тем меньше отклонение тележки от прямолинейного движения вперед. Допустим теперь, что передний мост 2, поворачиваясь поочередно то в одну, то другую сторону, совершает эти повороты в одну сторону на больший угол, нежели в другую, тогда тележка, совершая зигзагообразные движения, будет перемещаться вперед, заворачивая одновременно в ту сторону, в которую передний мост 2 поворачивается на больший угол. Таким образом, робот-тележка может совершать маневры.
Для обеспечения движения задним ходом с использованием реверсивного электродвигателя 7 поворачивают шкворень 4 с передним мостом 2 на 180 градусов, после чего робот-тележка может двигаться в противоположном направлении (как заднеприводная).
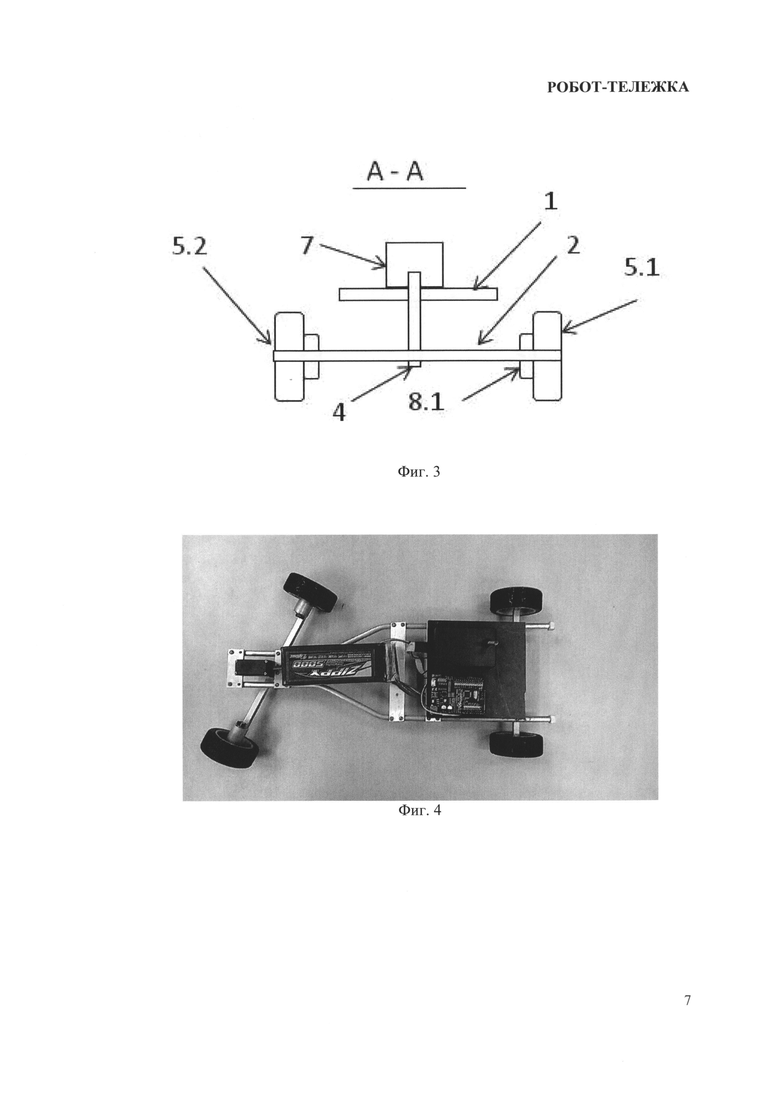
В НИИ механики МГУ создан действующий макет предлагаемого робота-тележки, фотография которого приведена на фиг. 4. Рама робота-тележки имеет размеры 43×13 см, расстояние между мостами - 33 см, расстояние между колесами переднего моста - 23 см, расстояние между колесами заднего моста - 19 см, диаметр колес - 6 см, на передних колесах установлены роллерные тормоза. Используется серво-мотор Mechaduino с шаговым двигателем типа пета 17 мощностью 24 ватт. Питание от аккумулятора с выходным напряжением 12 вольт.
Испытания продемонстрировали хорошую управляемость и маневренность робота-тележки, а также возможность совершать перемещения по сложной и занимательной траектории.
| название | год | авторы | номер документа |
|---|---|---|---|
| Робот-тележка | 2022 |
|
RU2813157C1 |
| ПУТЕОЧИСТИТЕЛЬНАЯ МАШИНА | 1997 |
|
RU2143029C1 |
| Многофункциональная малогабаритная машина повышенной проходимости "Машина Карасева" | 2024 |
|
RU2839666C1 |
| Опорно-сцепное устройство тракторного транспортного поезда | 2023 |
|
RU2811756C1 |
| Опорно-поворотное устройство двухосного прицепа | 2023 |
|
RU2805576C1 |
| Опорно-поворотное устройство двухосного прицепа | 2022 |
|
RU2792193C1 |
| Опорно-поворотное устройство двухосного прицепа с переменным наклоном шкворня | 2021 |
|
RU2774087C1 |
| ТРАКТОР ДЛЯ РАБОТЫ НА СКЛОНЕ | 1991 |
|
RU2045437C1 |
| СКЛАДНОЙ ВЕЛОМОБИЛЬ | 2002 |
|
RU2243124C2 |
| Устройство для монтажа грузов | 1989 |
|
SU1723011A1 |
Изобретение относится к области машиностроения, в частности к роботам-тележкам. Робот-тележка содержит раму с передним и задним мостами, снабженными колесами. Передний мост закреплен на раме посредством поворотного шкворня. Робот снабжен установленными на раме реверсивным электродвигателем, блоком дистанционного управления электродвигателем и блоком питания. Ротор электродвигателя соединен с поворотным шкворнем переднего моста, а колеса переднего моста установлены с возможностью вращения только в одном направлении. Каждое колесо снабжено пассивным независимым тормозом. Достигается улучшение управляемости тележки. 1 з.п. ф-лы, 4 ил.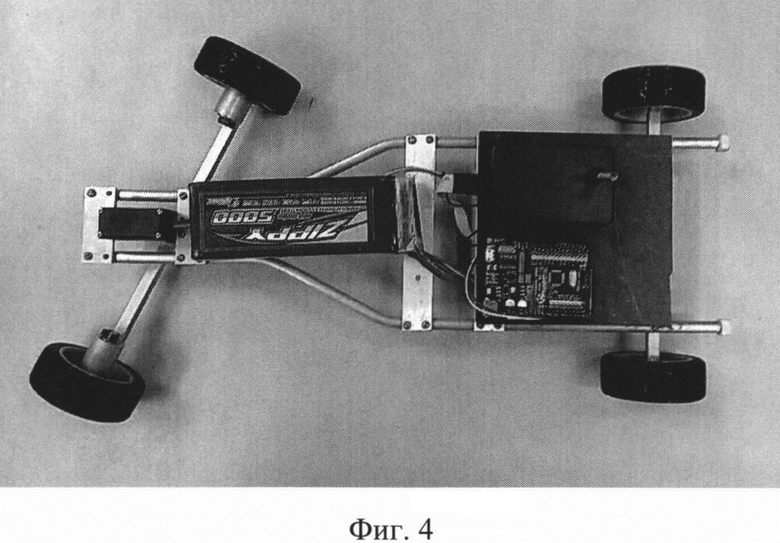
1. Робот-тележка, содержащий раму с передним и задним мостами, снабженными колесами, при этом передний мост закреплен на раме посредством поворотного шкворня, отличающийся тем, что робот снабжен установленными на раме реверсивным электродвигателем, выполненным с возможностью дистанционного управления, блоком дистанционного управления электродвигателем и блоком питания, при этом ротор электродвигателя соединен с поворотным шкворнем переднего моста, а колеса переднего моста установлены с возможностью вращения только в одном направлении, при этом каждое колесо снабжено пассивным независимым тормозом.
2. Робот-тележка по п. 1, отличающийся тем, что колеса переднего моста установлены под рамой.
| СПОСОБ ЗАМЕРА УСИЛИЙ, ДЕЙСТВУЮЩИХ НА ПОЛЕВУЮ ДОСКУ КОРПУСА ПЛУГА | 0 |
|
SU168035A1 |
| Устройство (инструмент) для накатки внутренней резьбы | 1956 |
|
SU108356A2 |
| RU 94012517 A1, 10.09.1996 | |||
| Устройство для закрепления лыж на раме мотоциклов и велосипедов взамен переднего колеса | 1924 |
|
SU2015A1 |

