Изобретение относится к машиностроению, в частности к робототехническим транспортным системам, используемым для автоматизации технологического процесса производства и транспортно-складских операций.
Известен транспортный робот (см. патент SU 1620293 А1, дата публикации 15.01.91), содержащий подвижную тележку, на платформе которой установлен манипулятор и технологические ячейки с тарой под транспортируемые детали, а также систему управления, установленную в корпусе подвижной тележки, поворотный механизм, который размещен в корпусе тележки, выполнен в виде вращающегося шпинделя, продольная ось которого перпендикулярна плоскости платформы, привода, кинематически связанного с этим шпинделем, неподвижного стола, установленного на платформе соосно со шпинделем и имеющего радиальный паз, и ползуна, установленного в радиальном пазу стола, при этом тара выполнена в виде магазина барабанного типа, на торцовой поверхности корпуса которого имеется фрикционное цанговое устройство, связанное со шпинделем, а на противоположной торцовой поверхности корпуса магазина выполнена спиральная канавка под транспортируемые детали, при этом на дне этой канавки выполнена конгруэнтная ей сквозная проточка, в которой установлен ползун поворотного механизма.
Недостатком данного устройства является отсутствие возможности вращения на 360 градусов во время движения, сложность конструкции.
Известна двухосная тележка (см. А.С. СССР №1641693, опубл. 15.04.1991 в Бюллетене изобретений №14,1991 г.), содержащая платформу, установленную на поворотных вокруг вертикальных осей колесных тележках, к которым прикреплены дышла, обращенные в разные стороны, при этом на торцах платформы выполнены пазы, дышла установлены на тележках с возможностью поочередного продольного выдвижения и стопорения в рабочих положениях и выполнены с Г-образными концами с возможностью их поочередного захода в пазы платформы для стопорения соответствующей колесной тележки от поворота.
Данное устройство имеет сложную конструкцию. Кроме того, оно не приспособлено для самостоятельного перемещения.
Известна двухосная тележка (см. А.С. СССР №119802, опубл. в «Бюллетене изобретений» №7 за 1959 г.), содержащая раму с передним и задним мостами, причем передний мост закреплен на раме посредством поворотного шкворня, а колеса переднего моста могут проходить под рамой.
Данное устройство также не приспособлено для самостоятельного перемещения и в качестве игрушки не обладает достаточной занимательностью.
Известна тележка на рельсовом ходу для перевозки рельсов, содержащая базовую раму, четыре колеса с индивидуальной подвеской, винтовые механизмы с клещевыми рельсовыми захватами, стояночные тормоза (см. Патент на полезную модель РФ №72484, МПК Е01В 29/16, публикация 20.04.2008).
Данное устройство предназначено для эксплуатации на железнодорожных путях, не имеет систем управления.
Известна тележка для монтажа, демонтажа и перевозки оборудования железнодорожных вагонов, содержащая установленную на ходовых колесах раму, на которой размещен грузовой захват с приводным устройством и параллелограммным механизмом, способный при помощи пневмоцилиндра точно позиционировать размещенное на тележке оборудование при его монтаже или демонтаже (см. Патент на полезную модель РФ №83230, МПК В62В 3/04, публикация 27.05.2009).
Данное устройство не имеет возможности автономного передвижения из за отсутствия блока управления и механизмов привода в движение.
Наиболее близким к заявленному техническому решению является робот-тележка (см. патент RU 2 689 049 C1, дата публикации 23.05.2019), содержащий раму с передним и задним мостами, снабженными колесами, при этом передний мост закреплен на раме посредством поворотного шкворня, снабжен установленными на раме реверсивным электродвигателем, выполненным с возможностью дистанционного управления, блоком дистанционного управления электродвигателем и блоком питания, при этом ротор электродвигателя соединен с поворотным шкворнем переднего моста, а колеса переднего моста установлены с возможностью вращения только в одном направлении, при этом каждое колесо снабжено пассивным независимым тормозом.
Данное устройство ограничено в манёвренности передвижения из-за стационарного заднего моста и вращения передних колес только в паре на одном мосте, малой эффективности грузоперевозок из-за ограниченного коэффициента использования площади платформы.
Техническим результатом заявляемого изобретения является увеличение маневренности передвижения при одновременном повышении объема перевозимых грузов.
Сущность технического решения заключается в том, что робот-тележка, состоящая из рамы, снабжена четырьмя колесами с электродвигателями, установленные в корпусные стаканы, соединенные с осевыми втулками, снабженными электродвигателями, блоком управления электродвигателями, блоком питания, и платформа, расположенная на штифтах.
Установка каждого колеса с электродвигателем на раме через осевые втулки с электродвигателями, обеспечивает вращение каждого колеса при движении робота-тележки, а включение дополнительной платформы обеспечивает увеличенную площадь под перевозимые грузы.
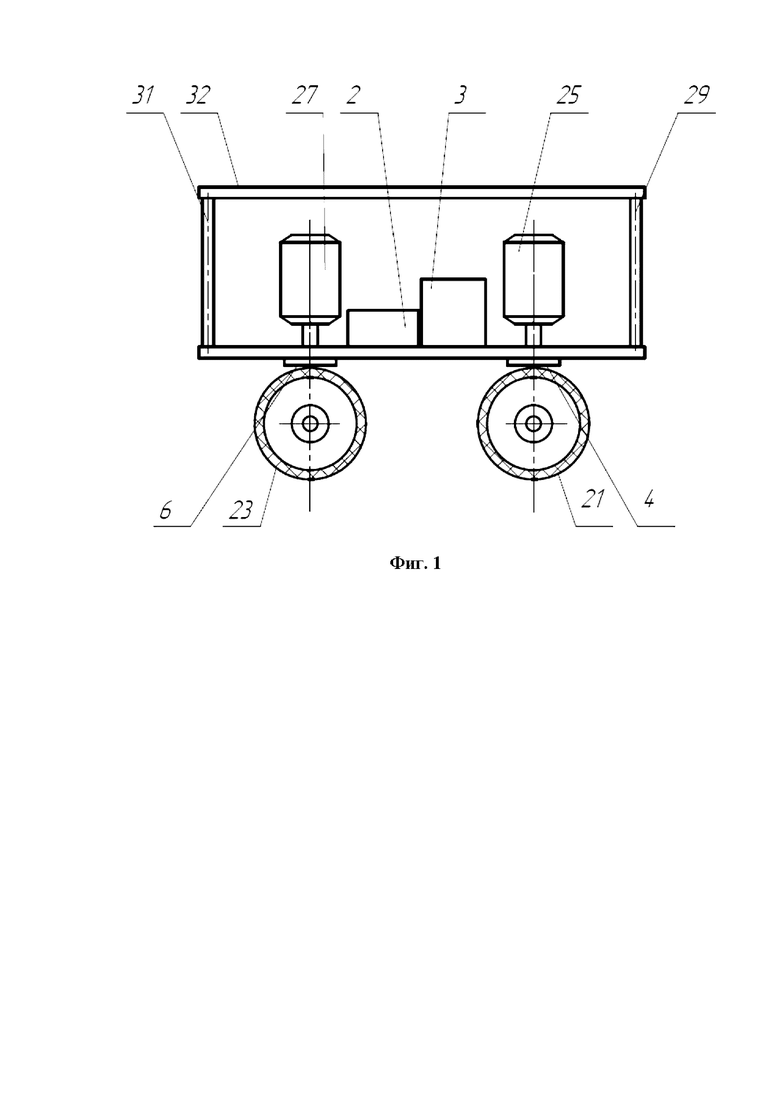
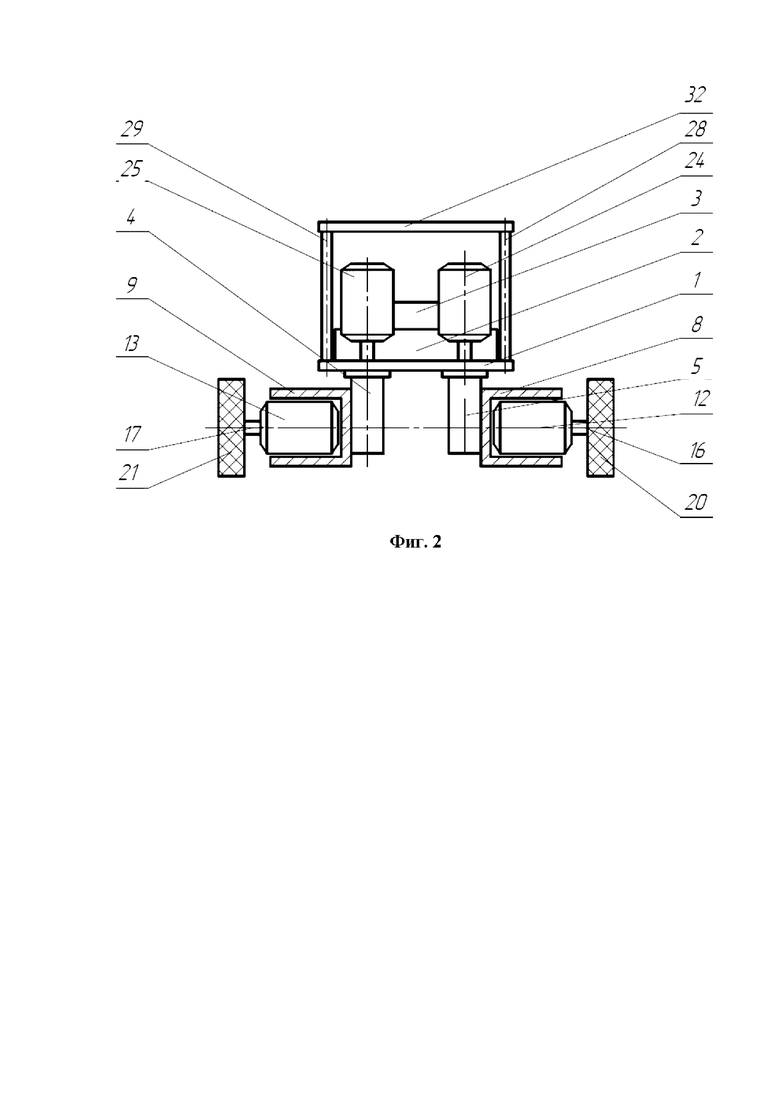
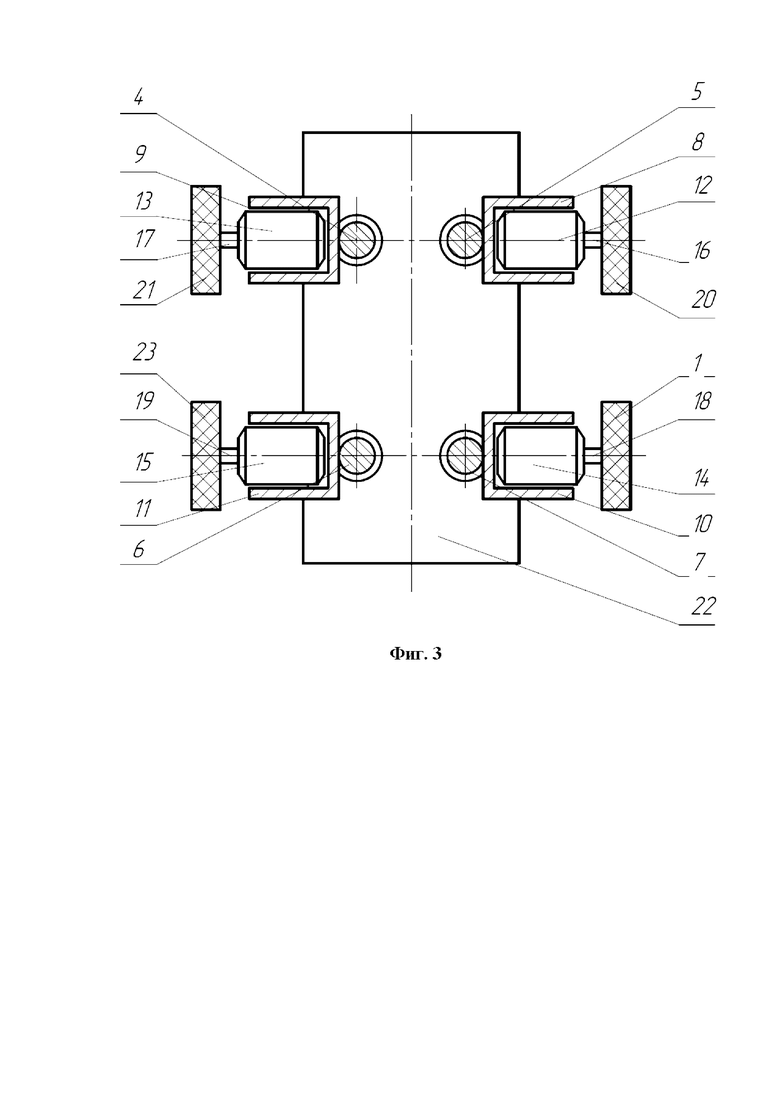
Предлагаемое устройство поясняется чертежами на фиг. 1 схематично показан вид робота-тележки сбоку, на фиг. 2. схематично показан вид робота-тележки спереди, на фиг. 3 вид снизу.
Робот-тележка содержит раму 1 с блоком управления электродвигателями 2, блоком питания 3, снабженную четырьмя колесами 20, 21, 22, 23, с электродвигателями 12, 13, 14, 15 установленные в корпусные стаканы 8, 9, 10, 11, соединённые с осевыми втулками 4, 5, 6, 7, содержащие электродвигатели 24, 25, 26, 27 для вращения, и платформу 32 для размещения перевозимых грузов, закрепленную с помощью штифтов 28, 29, 30, 31.
Робот-тележка работает следующим образом: от блока питания включаются электродвигатели 12, 13, 14, 15, обеспечивающие вращение колес для движения, электродвигатели 24, 25, 26, 27, обеспечивающие вращение осевых втулок 4, 5, 6, 7 на углы до 360 градусов для придания направления движения, и блок управления 2, который осуществляет управления электродвигателями, приводит в движение тележку и определяет его направление. На платформе 32 располагают перевозимые грузы.
Благодаря дополнительным осевым втулкам на каждом колесе, снабженных электродвигателями, появляется возможность контролировать направление движения каждого колеса, а платформа, позволяет обеспечить дополнительную площадку под расположение перевозимых грузов.
По сравнению с известными аналогами заявляемый робот - тележка с дополнительными осевыми втулками и электродвигателями на каждом колесе, позволяет управлять направлением движения каждого колеса, что обеспечивает повышенную манёвренность, а дополнительная платформа обеспечивает увеличенную площадь под перевозимые грузы.
| название | год | авторы | номер документа |
|---|---|---|---|
| РОБОТ-ТЕЛЕЖКА | 2018 |
|
RU2689049C1 |
| ТЕЛЕЖКА ТРАНСПОРТИРОВОЧНАЯ | 2023 |
|
RU2803078C1 |
| УСТРОЙСТВО ДЛЯ ВЫПРЕССОВКИ ШКВОРНЕЙ | 1992 |
|
RU2043938C1 |
| БЛОЧНО-МОДУЛЬНОЕ КОННОЕ ТРАНСПОРТНОЕ СРЕДСТВО | 1994 |
|
RU2097244C1 |
| СТЕНД ДЛЯ ИССЛЕДОВАНИЯ ДВИЖЕНИЯ НАГРУЖЕННОГО МОБИЛЬНОГО РОБОТА ПРИ НАЛИЧИИ ПРОСКАЛЬЗЫВАНИЯ КОЛЁС | 2017 |
|
RU2670352C1 |
| МНОГОФУНКЦИОНАЛЬНОЕ ТРАНСПОРТНОЕ СРЕДСТВО | 2016 |
|
RU2641951C1 |
| БЛОЧНО-МОДУЛЬНОЕ КОННОЕ ТРАНСПОРТНОЕ СРЕДСТВО | 2002 |
|
RU2238870C2 |
| Устройство для монтажа грузов | 1989 |
|
SU1723011A1 |
| Многофункциональная малогабаритная машина повышенной проходимости "Машина Карасева" | 2024 |
|
RU2839666C1 |
| НАПОЛЬНАЯ МАШИНА ДЛЯ ЗАГРУЗКИ ПЛАВИЛЬНЫХ ПЕЧЕЙ | 2000 |
|
RU2210710C2 |
Изобретение относится к робототехническим транспортным системам, используемым для автоматизации технологического процесса производства и транспортно-складских операций. Робот-тележка содержит раму, блок управления электродвигателями, блок питания, четыре колеса и платформу для размещения перевозимых грузов, закрепленную с помощью штифтов. Каждое колесо соединяется с электродвигателем, который установлен в корпусной стакан. Корпусный стакан соединен с осевой втулкой с электродвигателем. Достигается увеличение маневренности передвижения при одновременном повышении объема перевозимых грузов. 3 ил.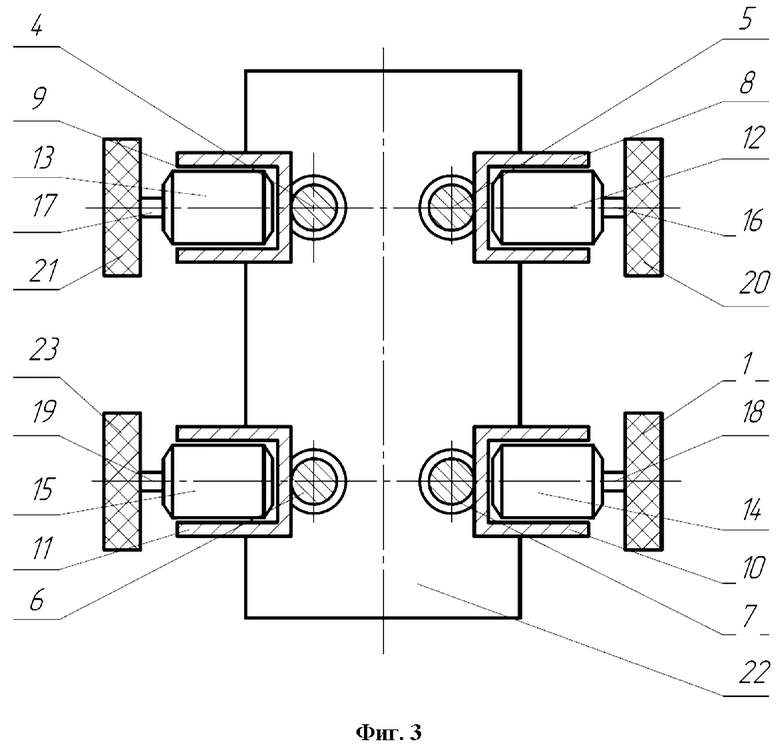
Робот-тележка, содержащий раму, блок управления электродвигателями и блок питания и снабженный четырьмя колесами, отличающийся тем, что каждое колесо соединяется с электродвигателем, установленным в корпусной стакан, соединённый с осевой втулкой с электродвигателем, и содержит платформу для размещения перевозимых грузов, закрепленную с помощью штифтов.
| Тележка транспортировочная | 2018 |
|
RU2683430C9 |
| CN 107381428 A, 24.11.2017 | |||
| Способ перевода цитраля в нерол | 1953 |
|
SU97080A1 |
| CN 209972152 U, 21.01.2020 | |||
| CN 211001613 U, 14.07.2020. | |||

