Заявляемое изобретение относится к космической технике. Областью применения изобретения является моделирование процессов удаления космического мусора, например, с геостационарной орбиты (ГСО) с использованием программно-аппаратных средств. Изобретение может быть использовано на различных стадиях разработки и отладки проектов по удалению объектов космического мусора (ОКМ). Далее по тексту под термином «объект космического мусора» рассматриваются габаритные техногенные объекты, с известными техническими характеристиками, такие как, например, нефункционирующие космические аппараты с определенным типом и заводским (серийным) номером.
К настоящему времени известно значительное количество зарубежных и отечественных патентов, описывающих способы и средства обнаружения, захвата и удаления КМ с геостационарной орбиты. Как правило, для удаления ОКМ предполагают использование сервисных космических аппаратов (СКА), в задачи которых входит сближение с ОКМ, захват и увод ОКМ на орбиту захоронения. Для захвата ОКМ предполагают использование широкого спектра средств: например, различного рода манипуляторов, сетей, тросов, гарпунов, Для увода ОКМ на орбиту захоронения предлагают использовать, например, буксиры, средства на основе ионных пушек и солнечных парусов.
Характерным примером разрабатываемых проектов по удалению ОКМ с ГСО является источник [1] - патент RU №2559392 «Способ удаления с геостационарной орбиты нефункционирующего космического аппарата», ФГУП ЦНИИмаш, РФ. Техническим решением по данному патенту удаление ОКМ в виде нефункционирующего космического аппарата предусматривается с помощью космического аппарата (КА), имеющего средства наблюдения, захвата и дополнительный запас топлива. Для выполнения задачи переводят КА после окончания срока активного существования в точку стояния на геостационарной орбите нефункционирующего КА, осуществляют ориентацию относительно нефункционирующего КА, наводят на нефункционирующий КА, захватывают нефункционирующий КА, включают двигатель КА, переводят связку космических аппаратов на орбиту захоронения.
Для реализации подобного технического решения с задачей удаления конкретного нефункционирующего КА необходимо учесть определенный перечень его параметров. А именно: параметры его орбитального движения, включая скорости его вращения относительно собственных осей; а также, габаритно-массовые характеристики, моменты инерции, положение центра масс, конструкцию данного космического аппарата.
Для сервисного КА, разрабатываемого для выполнения данной задачи также, требуется определить ряд параметров. А именно: габаритно-массовые характеристики, моменты инерции, положение центра масс: особенности конструкции сервисного космического аппарата. Кроме этого необходимо определить требуемый запас энергообеспечения и рабочего тела (топлива) для выполнения задач коррекции орбиты и ориентации КА в пространстве при орбитальном маневрировании. Важными характеристиками в данном случае будут являться: параметры, характеризующие тип захвата, его механические характеристики (например, прочность захвата, величины ударных и динамических нагрузок на поверхность конструкции нефункционирующего КА), а также принцип, используемый при уводе захваченного КА на орбиту захоронения.
При разработке сценария выполнения задачи необходимо также учитывать такие параметры, как скорости сближения СКА с нефункционирующим КА, динамику изменения их взаимного пространственного положения, деформацию узла захвата, взаимное расположение центров масс и изменение центра массы СКА в связи с выработкой части топлива, возмущающие моменты, возникающие при движении связки аппаратов в направлении орбиты захоронения. Кроме этого при маневрировании в зоне ГСО, необходимо устанавливать границы перемещения СКА и удаляемого ОКМ, исключая перемещение объектов в рабочие зоны соседних функционирующих КА.
На заключительной фазе выполнения задачи необходимо предусмотреть маневрирование СКА, обеспечивающее благополучное разделение с ОКМ и движение СКА в соответствии с дальнейшей программой.
Учитывая высокую стоимость подобных проектов и степени рисков в случае их нештатного развития, возможно утверждать, что на всех этапах разработки и реализации, подобные проекты требуют тщательной проработки и детализации с возможностью изменения определенных параметров миссии и оценки ожидаемых результатов. Широкие возможности для реализации оперативной проработки различных проектов содержат методики на основе имитации, либо моделирования указанных процессов с помощью программно-аппаратных средств.
В настоящее время известны способы моделирования сложных технических систем, например, патенты РФ: [2] - RU №2554544 «Цифровая электронная система управления с встроенной полной термогазодинамической математической моделью газотурбинного двигателя и авиационный газотурбинный двигатель», ФГУП «Центральный институт авиационного моторостроения имени П.И. Баранова» и [3] - RU №2444041 «Комплекс имитационного и физико-математического моделирования процессов маневрирования автономных подводных аппаратов с бортовой гидроакустической аппаратурой наведения на подводные объекты», РФ в лице Министерства промышленности и торговли РФ.
Прототипом способа моделирования процесса удаления космического мусора выбран способ, описанный в работе [4] - патент РФ RU №2527632 «Способ наземной имитации полета космических аппаратов в космосе», Федеральное государственное автономное образовательное учреждение высшего профессионального образования «Московский физико-технический институт (государственный университет)».
Данное изобретение относится к способам имитации полета космических аппаратов. Для реализации способа подготавливают аппаратные средства, моделируют орбитальное движение КА по предварительно заданному алгоритму и/или при приеме управляющих команд в режиме реального времени, моделируют движение небесной сферы в поле зрения каждого звездного датчика по параметрам текущей ориентации КА с учетом динамики его движения, внешней среды, положения Солнца и Луны в инерциальной системе координат, моделируют появление нештатных ситуаций в работе бортовой аппаратуры ориентации и навигации КА, осуществляют контроль реакции системы управления ориентацией и навигацией при нештатных ситуациях, имитируют солнечное излучение для астроориентации и создания боковой помехи в инфракрасном и видимом диапазонах, имитируют сигналы спутников ГЛОНАСС и/или GPS с учетом параметров орбитального движения КА, моделируют орбитальное движение КА по трем осям вращения. Изобретение позволяет повысить многофункциональность КА.
Способ-прототип хотя и позволяет имитировать орбитальное движение космического аппарата, но при этом его основное назначение - это отработка бортовой аппаратуры систем ориентации и навигации КА, а именно:
- моделировать воздействие внешних условий космического пространства на бортовую аппаратуру ориентации и навигации;
- проверять работу бортовой аппаратуры ориентации и навигации, как в автономном, так и в комплексном режимах;
- проводить отработку программно-алгоритмического обеспечения бортовой аппаратуры ориентации и навигации КА;
- моделировать наступление нештатных ситуаций в работе бортовой аппаратуры ориентации и навигации КА и разрабатывать методы преодоления подобных ситуаций;
- контроль реакции системы на нештатные ситуации.
Недостатком способа имитации полета космического аппарата, описанного в прототипе, является отсутствие возможности применения его для моделирования процесса удаления космического мусора, а именно, моделирования взаимодействия сервисного космического аппарата с ОКМ - нефункционирующим космическим аппаратом на всех этапах миссии: сближения СКА с ОКМ, захвата ОКМ, доставки ОКМ на заданную орбиту, разделения СКА и ОКМ, перевода СКА на заданную орбиту. При этом следует учитывать, что для моделирования взаимодействия сервисного космического аппарата с ОКМ требуется моделирование как минимум, двух объектов: СКА и ОКМ, движущихся по орбитам в единой пространственно-временной системе, учитывающей влияние астрономических факторов, формируемых астрономическими объектами на орбите Земли. Кроме этого, в прототипе моделирование выполняется только в реальном масштабе времени, что усложняет процедуры исследования длительных и кратковременных процессов, где требуется масштабирование модельного (отсчитываемого относительно эпохового времени) времени (замедление, либо ускорение моделируемого процесса относительно реального времени). Также, недостатком прототипа является то, что орбитальное движение КА моделируют по предварительно заданному алгоритму, тогда как, при удалении конкретного ОКМ модель его орбитального движения рациональнее строить на основе реальных параметров его орбитального движения.
Технической проблемой изобретения является получение результата моделирования взаимодействия ОКМ и СКА максимально соответствующего реальному процессу с целью обеспечения качества и надежности при осуществлении процесса удаления космического мусора с орбиты.
Эта техническая проблема решается за счет того, что используют аппаратно-программные средства и базы данных; моделирование орбитального движения космических аппаратов (КА), в том числе, по осям их вращения с учетом влияния астрономических условий на динамику движения объектов; имитацию сигналов спутников ГЛОНАСС и/или GPS; при этом используют данные по конструкции реального объекта космического мусора (ОКМ), а именно, реального нефункционирующего космического аппарата определенного типа, подлежащего удалению с орбиты, и параметры его орбитального движения; указанные параметры получают путем измерения данных по орбитальному движению заданного к удалению ОКМ и их аппроксимации на время планируемой миссии, по параметрам заданного к удалению ОКМ разрабатывают алгоритм выполнения основных этапов способа его удаления с геостационарной орбиты (ГСО); определяют требования к конструкции, условиям эксплуатации и алгоритму функционирования сервисного космического аппарата; создают 3D-модель заданного к удалению ОКМ; создают 3D-модель сервисного космического аппарата (СКА) с узлом захвата в его составе; моделируют процессы сближения СКА с заданным к удалению ОКМ и его захвата; моделируют процесс орбитального движения связки СКА с ОКМ; моделируют процесс разделения ОКМ и СКА; при моделировании синхронизируют по времени модели орбитального движения ОКМ и сервисного космического аппарата.
В состав комплекса предлагаемого для решения технической проблемы входят: база данных по конструкции реального нефункционирующего космического аппарата, подлежащего удалению с ГСО при выполнении планируемой миссии, средства регистрации и аппроксимации параметров орбитального движения; средства 3D-моделирования конструкций ОКМ и СКА; средства синхронизации и масштабирования модельного времени обоих объектов; средства моделирования упругих деформаций их конструкционных элементов и текущего изменения центров масс, связанного с выработкой топлива.
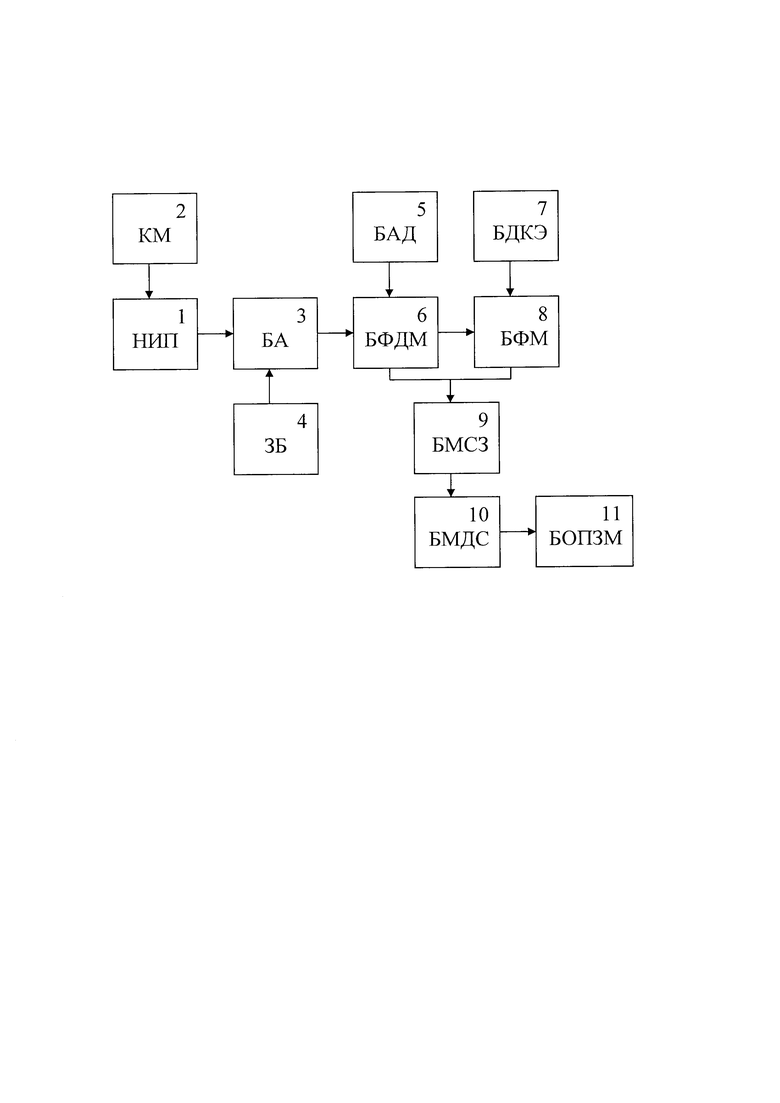
Суть изобретения поясняется графическим изображением, где показана схема комплекса. Комплекс для реализации способа моделирования процесса удаления космического мусора построен как локальная сеть. В состав комплекса входят: наблюдательно-измерительный пункт (НИП) 1, предназначенный для регистрации параметров орбитального движения реального ОКМ 2; блок аппроксимации (БА) 3; загрузочный блок (ЗБ) 4; блок архивированных данных (БАД) 5; блок формирования детализированной модели ОКМ (БФДМ) 6; база данных по конструкционным элементам платформ геостационарных КА (БДКЭ) 7; блок формирования модели СКА (БФМ) 8; блок моделирования сближения и захвата ОКМ (БМСЗ) 9; блок моделирования движения связки (БМДС) СКА и ОКМ на заданную орбиту 10; блок определения параметров завершения миссии (БОПЗМ) 11.
Принцип работы по предлагаемому способу заключается в следующем. На наблюдательно-измерительном пункте (НИП) 1 с помощью средств наблюдения и измерения регистрируют в реальном времени параметры орбитального движения, включая скорости вращения относительно собственных осей, реального ОКМ 2 - нефункционирующего космического аппарата определенного типа и серийного номера известной конструкции, подлежащего удалению с ГСО при выполнении планируемой миссии.
С НИП 1 полученные параметры орбитального движения передают в блок аппроксимации 3. Также, в блок аппроксимации 3, например, из загрузочного блока 4 вводят исходные данные миссии удаления ОКМ 2: дату и время начала миссии (например, запуска СКА), параметры орбиты на которую следует доставить ОКМ, предварительное заданное время доставки ОКМ 2 на заданную орбиту, параметры движения астрономических тел на период выполнения миссии. С помощью блока аппроксимации 3 формируют модель орбитального движения ОКМ 2, учитывающую скорости его вращения относительно собственных осей и влияние на него астрономических тел на период выполнения миссии. Данные из блока аппроксимации 3 поступают в блок формирования детализированной модели ОКМ 6. Также, в блок формирования детализированной модели ОКМ 6, например, из блока архивированных данных 5 поступают данные по конструкции ОКМ 2, необходимые для формирования его 3D-модели. В результате, в БФДМ 6 создается подробная модель ОКМ 2, учитывающая особенности его конструкции, включая габариты, массу, моменты инерции и динамические параметры орбитального движения на период выполнения миссии. На основании подробной модели ОКМ 2 и данных, поступающих, например, из БДКЭ 7, в блоке формирования модели СКА 8 формируют данные по конструкции, условиям эксплуатации, алгоритму функционирования, параметрам орбитального движения, предусматривающим приближение СКА к ОКМ на заданное расстояние в заданное время, и 3D-модель сервисного космического аппарата. Также, в БФМ 8 формируют алгоритм захвата ОКМ 2 и 3D-модель узла захвата в составе СКА. Данные по моделям ОКМ и СКА, включая параметры их орбитального движения, передают в БМСЗ 9. В БМСЗ 9 моделируют процесс сближения СКА с ОКМ, учитывая при этом выработку топлива и, как следствие, смещение центра масс СКА. При моделировании захвата ОКМ 2 моделируют изменение скоростей вращения СКА и ОКМ, деформации узла захвата и элементов конструкции обоих объектов. Формируют данные орбитального движения связки СКА с ОКМ, учитывая угловые скорости вращения связки, возможные гармонические колебания упругих элементов конструкций объектов и направление векторов тяги двигателей коррекции СКА относительно общего центра масс. Данные, сформированные в блоке 9, передают в блок моделирования движения связки СКА и ОКМ на заданную орбиту 10. В блоке моделирования движения связки СКА и ОКМ на заданную орбиту БМДС 10 моделируют процесс стабилизации и ориентации связки СКА и ОКМ, работу двигателей коррекции и ориентации при движение связки СКА и ОКМ на заданную орбиту, уточняют дату и время доставки ОКМ на заданную орбиту. Данные, полученные в блоке 10, передают в блок определения параметров завершения миссии 11. В блоке определения параметров завершения миссии 11 моделируют процесс разделения ОКМ и СКА, параметры орбитального движения ОКМ после отделения от СКА, процесс ориентации и стабилизации СКА, параметры орбитального движения СКА после отделения от ОКМ, уточняют оставшийся на борту СКА запас топлива, точную массу СКА и положение его центра масс.
В блоках 9, 10 и 11 предусматривают программные средства синхронизации орбитального движения ОКМ и СКА по модельному времени, а также, программные средства применения при моделировании реального, ускоренного и замедленного масштабов времени.
На всех этапах миссии модель орбитального движения реального ОКМ может быть уточнена, например, в связи с изменением положения соседних функционирующих космических аппаратов.
В части примеров реализации следует отметить следующее.
Комплекс, предлагаемый для решения технической проблемы, может быть создан на основе локальной сети, объединяющей вычислительные средства, с установленными на них программами моделирования со средствами НИП, с базами данных и загрузочным модулем в соответствии с графическим изображением, где показана схема комплекса. Для организации обмена данными между функциональными элементами комплекса возможно использовать, например, Автоматизированную систему управления и телеметрического обеспечения (АСУ ИТО) «Раскат», используемую в АО «ИСС» для автоматизации процедур проведения и контроля результатов комплексных электрических испытаний изготавливаемых космических аппаратов и их подсистем. Информация по АСУ ИТО «Раскат» приведена, например, в работе [5] - (А.В. Никипелов, Р.С. Симанов, Ю.М. Ермошкин, Е.Н. Якимов, В.В. Максимов, А.К. Шаров, Стенд огневых испытаний плазменных двигателей в АО «ИСС», Международный научно-технический журнал Наукоемкие технологии №8, 2016, т. 17).
Сведения по примерам реализации НИП, по классификации ОКМ и по методам измерения орбитального движения ОКМ, включая их вращение относительно собственных осей, приведены в источнике [6] (Левкина П.А., Физические и орбитальные характеристики объектов космического мусора по данным оптических наблюдений, диссертация на соискание ученой степени кандидата физико-математических наук, Федеральное государственное бюджетное учреждение науки Институт астрономии Российской Академии Наук, Москва, 2016).
В качестве примера реального ОКМ 2 - нефункционирующего космического аппарата определенного типа и серийного номера известной конструкции, подлежащего удалению с ГСО при выполнении планируемой миссии, может быть указан любой из космических геостационарных аппаратов изготовления, например, АО «ИСС», выведенный к настоящему времени из эксплуатации. Данные по КА изготовления АО «ИСС» приведены, например, в источнике [7] (АО «Информационные спутниковые системы» имени академика М.Ф. Решетнева» Более 55 лет в космосе, http://raaks.ru/docs/doc20170315_019.pdf)
БА 3 может быть выполнен на основе стандартных вычислительных программ, например, Excel. Либо на основе специализированного наземного отладочного комплекса, описанного в источнике [8] (А.В. Барков, А.А. Колташев, М.В. Тимисков Технология создания программных модулей бортовых компьютеров спутников, Международный научно-технический журнал Наукоемкие технологии №9, 2014, т. 15), используемого в АО «ИСС» для отладки бортового программного обеспечения изготавливаемых КА. В состав указанного комплекса входят средства, достаточные для формирования модели орбитального движения нефункционирующего космического аппарата, учитывающей влияние астрономических объектов, построенной на основе данных, полученных с НИП. Также, указанный комплекс обеспечивает операции с модельным временем (синхронизация, масштабирование) и содержит данные по движению астрономических объектов. Созданную в БА модель орбитального движения аппроксимируют. Под аппроксимацией здесь принимается формирование предварительного прогноза по движению заданного ОКМ на период выполнения миссии. На основе этого комплекса также могут быть реализованы блоки БМДС 10 и БОПЗМ 11.
ЗБ 4 может быть реализован в среде АСУ ИТО «Раскат», предусматривающей возможность ввода (в данном случае в БА) оператором массивов информации.
БАД 5 и БДКЭ 7 могут быть реализованы как электронная база данных по конструкции ОКМ, подлежащего удалению с ГСО при выполнении планируемой миссии и, соответственно, база данных по конструкционным элементам платформ геостационарных КА, например, на основе технического архива АО «ИСС».
БФДМ 6 и БФМ 8 могут быть реализованы как средства 3D-моделирования на основе, например, средства автоматизированного проектирования CATIA, описанного, например, в источнике [9] (http://www.axispanel.ru/working-party/programs/catia.php).
БМСЗ 9 может быть реализован также, на основе средства автоматизированного проектирования CATIA и, например, среды для моделирования, имитации и оценки результатов анализа характеристик изделия FEMAP, описанной, например, в источнике [10] (https://ru.wikipedia.org/wiki/Femap).
Заявляемый способ, в отличии от прототипа, позволяет выполнять моделирование процесса удаления космического мусора, а именно, моделирования взаимодействия сервисного космического аппарата с ОКМ - нефункционирующим космическим аппаратом на всех этапах миссии при помощи комплекса, предусматривающего наличие в нем блоков хранения данных, необходимых для моделирования как процесса удаления, так и самих объектов - СКА и ОКМ; блоков моделирования движения объектов, сближения, захвата и вывода ОКМ с ГСО на заданную орбиту, движения СКА и ОКМ после завершения миссии. При этом при моделировании используют реальные данные как СКА и ОКМ, так и реальные данные условий и параметров, в которых осуществляется данная миссия. Кроме того, предусматривается возможность масштабирования процесса взаимодействия аппаратов во времени, что позволяет прогнозировать ситуации и заблаговременно корректировать процесс.
Заявляемое изобретение может быть использовано в космической технике на различных этапах разработки, детализации и отработки сценариев удаления космического мусора с помощью сервисных космических аппаратов.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ УПРАВЛЕНИЯ ДВИЖЕНИЕМ СЕРВИСНОГО КОСМИЧЕСКОГО АППАРАТА | 2019 |
|
RU2714475C1 |
| СПОСОБ ПОДДЕРЖАНИЯ СОСТАВА ОРБИТАЛЬНОЙ ГРУППИРОВКИ АВТОМАТИЧЕСКИХ КОСМИЧЕСКИХ АППАРАТОВ | 2017 |
|
RU2666014C1 |
| Способ определения последовательности перелётов между объектами космического мусора в окрестности геостационарной орбиты | 2020 |
|
RU2759026C1 |
| СПОСОБ УДАЛЕНИЯ С ГЕОСТАЦИОНАРНОЙ ОРБИТЫ НЕФУНКЦИОНИРУЮЩЕГО КОСМИЧЕСКОГО АППАРАТА | 2014 |
|
RU2559392C1 |
| СПОСОБ УПРАВЛЕНИЯ ДВИЖЕНИЕМ КОСМИЧЕСКОГО АППАРАТА | 2018 |
|
RU2706293C1 |
| СПОСОБ УВОДА ПРЕКРАТИВШИХ АКТИВНОЕ СУЩЕСТВОВАНИЕ КОСМИЧЕСКИХ АППАРАТОВ С РАБОЧИХ НАКЛОННЫХ И ЭКВАТОРИАЛЬНЫХ ОРБИТ В ПЛОТНЫЕ СЛОИ АТМОСФЕРЫ | 2018 |
|
RU2708406C1 |
| СПОСОБ УВОДА КОСМИЧЕСКОГО АППАРАТА, ЗАВЕРШИВШЕГО АКТИВНОЕ ФУНКЦИОНИРОВАНИЕ С ГЕОСТАЦИОНАРНОЙ ОРБИТЫ | 2023 |
|
RU2824862C1 |
| Способ обнаружения и контроля космического мусора вблизи геостационарной орбиты | 2018 |
|
RU2684253C1 |
| СПОСОБ ЭЛЕКТРОМАГНИТНОЙ УБОРКИ ЭЛЕКТРОПРОВОДЯЩЕГО КОСМИЧЕСКОГО МУСОРА В ОКОЛОЗЕМНОМ ПРОСТРАНСТВЕ И УСТРОЙСТВО ДЛЯ БЕСКОНТАКТНОГО ЗАХВАТА И УДЕРЖАНИЯ ОДНОГО И БОЛЕЕ ЭЛЕКТРОПРОВОДЯЩИХ ОБЪЕКТОВ КОСМИЧЕСКОГО МУСОРА | 2020 |
|
RU2769807C1 |
| Способ изменения траектории опасного космического объекта | 2019 |
|
RU2745378C1 |
Изобретение относится к космической технике. В способе моделирования процесса удаления космического мусора используют данные по конструкции реального объекта космического мусора (ОКМ), а именно реального нефункционирующего космического аппарата (КА) определенного типа, подлежащего удалению с орбиты, и параметры его орбитального движения. Указанные параметры получают путем измерения данных по орбитальному движению заданного к удалению ОКМ и их аппроксимации на время планируемой миссии, по параметрам заданного к удалению ОКМ разрабатывают алгоритм выполнения основных этапов способа его удаления с геостационарной орбиты (ГСО). Определяют требования к конструкции, условиям эксплуатации и алгоритму функционирования сервисного КА; создают 3D-модель заданного к удалению ОКМ. Создают 3D-модель сервисного космического аппарата (СКА) с узлом захвата в его составе. Моделируют процессы сближения СКА с заданным к удалению ОКМ и его захвата, процесс орбитального движения связки СКА с ОКМ, процесс разделения ОКМ и СКА. При этом синхронизируют по времени модели орбитального движения ОКМ и СКА. Техническим результатом изобретения является обеспечение выбора оптимального варианта удаления ОКМ. 1 ил.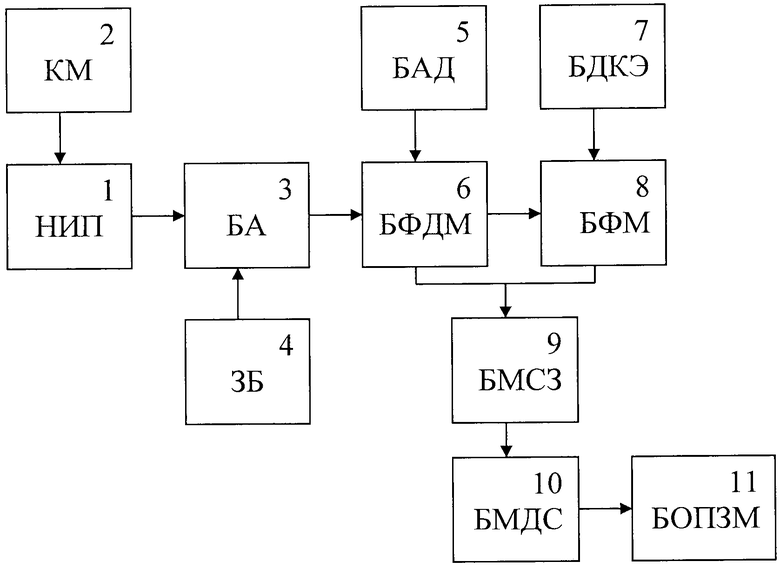
Способ моделирования процесса удаления космического мусора, включающий использование аппаратно-программных средств и баз данных; моделирование орбитального движения космических аппаратов (КА), в том числе по осям их вращения с учетом влияния астрономических условий на динамику движения объектов; имитацию сигналов спутников ГЛОНАСС и/или GPS, отличающийся тем, что используют данные по конструкции реального объекта космического мусора (ОКМ), а именно реального нефункционирующего космического аппарата определенного типа, подлежащего удалению с орбиты, и параметры его орбитального движения; указанные параметры получают путем измерения данных по орбитальному движению заданного к удалению ОКМ и их аппроксимации на время планируемой миссии, по параметрам заданного к удалению ОКМ разрабатывают алгоритм выполнения основных этапов способа его удаления с геостационарной орбиты (ГСО); определяют требования к конструкции, условиям эксплуатации и алгоритму функционирования сервисного космического аппарата; создают 3D-модель заданного к удалению ОКМ; создают 3D-модель сервисного космического аппарата (СКА) с узлом захвата в его составе; моделируют процессы сближения СКА с заданным к удалению ОКМ и его захвата; моделируют процесс орбитального движения связки СКА с ОКМ; моделируют процесс разделения ОКМ и СКА; при моделировании синхронизируют по времени модели орбитального движения ОКМ и сервисного космического аппарата.
| СПОСОБ НАЗЕМНОЙ ИМИТАЦИИ ПОЛЕТА КОСМИЧЕСКИХ АППАРАТОВ В КОСМОСЕ | 2012 |
|
RU2527632C2 |
| СПОСОБ УДАЛЕНИЯ С ГЕОСТАЦИОНАРНОЙ ОРБИТЫ НЕФУНКЦИОНИРУЮЩЕГО КОСМИЧЕСКОГО АППАРАТА | 2014 |
|
RU2559392C1 |
| US 20150088475 A1, 26.03.2015. | |||

