Область техники, к которой относится изобретение
[0001] Настоящее изобретение относится к способу прогнозирования курса и к устройству прогнозирования курса.
Уровень техники
[0002] Традиционно известна технология управления рулением, в которой путь движения едущего впереди транспортного средства получается или вычисляется, и форма кривой полосы движения, по которой движется рассматриваемое транспортное средство (полосы движения рассматриваемого транспортного средства), прогнозируется из пути движения едущего впереди транспортного средства (см. патентный документ 1).
Список библиографических ссылок
Патентные документы
[0003] Патентный документ 1. Публикация заявки на патент (Япония) номер 2013-226973
Сущность изобретения
Техническая задача
[0004] Тем не менее, в патентном документе 1, затруднительно прогнозировать форму искривления полосы движения рассматриваемого транспортного средства из пути движения расположенного рядом транспортного средства, движущегося в полосе движения, отличной от полосы движения рассматриваемого транспортного средства.
[0005] Настоящее изобретение осуществлено с учетом вышеуказанной проблемы, и его цель заключается в том, чтобы предоставлять способ прогнозирования курса и устройство прогнозирования курса, которые позволяют прогнозировать курс рассматриваемого транспортного средства из пути движения расположенного рядом транспортного средства.
Решение задачи
[0006] В одном аспекте настоящего изобретения, курс рассматриваемого транспортного средства прогнозируется посредством увеличения или уменьшения размера пути движения расположенного рядом транспортного средства на основе направления поворота и поперечной позиции расположенного рядом транспортного средства.
Преимущества изобретения
[0007] Согласно одному аспекту настоящего изобретения, поскольку курс рассматриваемого транспортного средства прогнозируется посредством увеличения или уменьшения размера пути движения расположенного рядом транспортного средства, курс рассматриваемого транспортного средства может прогнозироваться посредством использования пути движения расположенного рядом транспортного средства, движущегося в полосе движения, отличной от полосы движения рассматриваемого транспортного средства.
Краткое описание чертежей
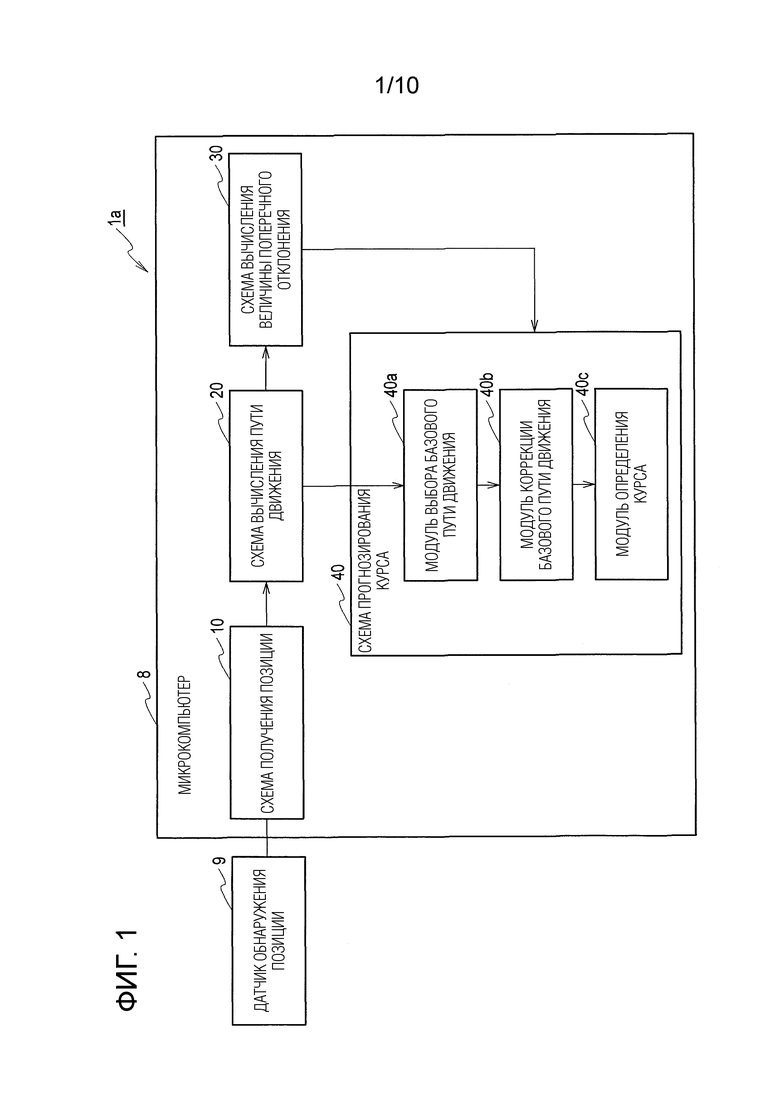
[0008] Фиг. 1 является блок-схемой, иллюстрирующей общую конфигурацию устройства 1a прогнозирования курса согласно первому варианту осуществления.
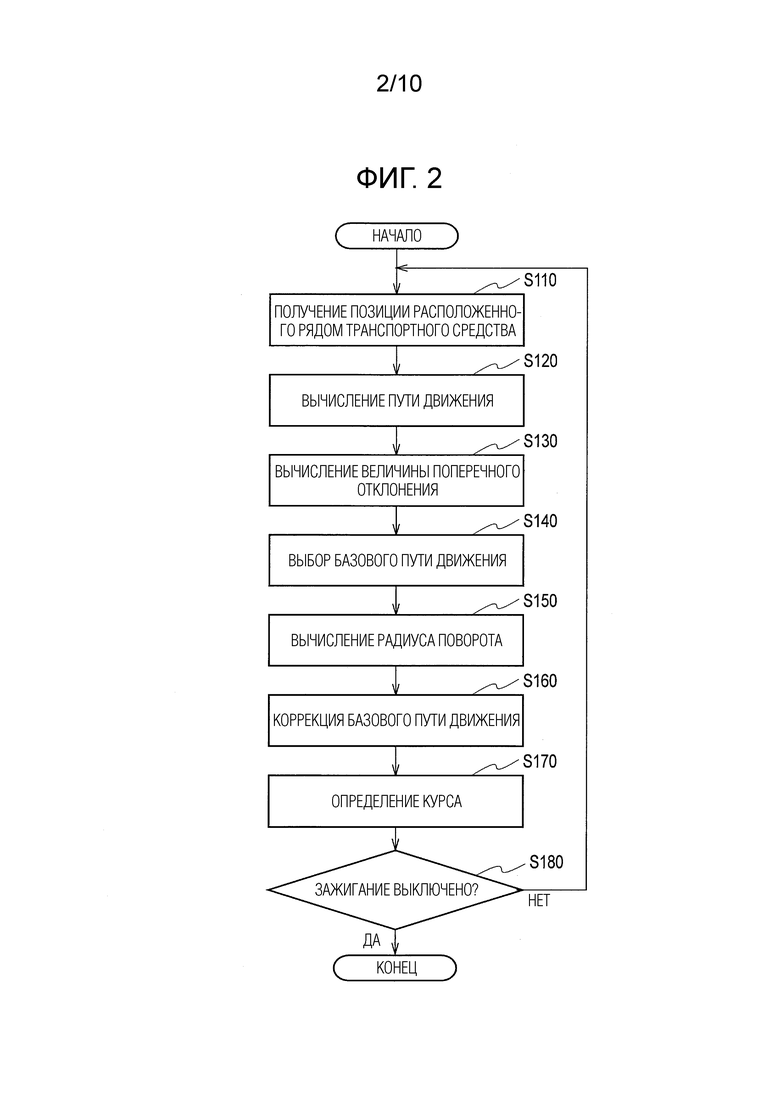
Фиг. 2 является блок-схемой последовательности операций, поясняющей пример способа прогнозирования курса с использованием устройства 1a прогнозирования курса, проиллюстрированного на фиг. 1.
Фиг. 3 является видом "с высоты птичьего полета" расположенных рядом транспортных средств (82i, 82j) и их путей (83i, 83j) движения сверху относительно рассматриваемого транспортного средства 81.
Фиг. 4 является видом "с высоты птичьего полета", который иллюстрирует несколько точек (P1, P2, P3, P4, P5,...) пути на карте и путь 83M движения, сформированный из аппроксимирующей кривой этих точек, и который поясняет пример конкретного способа прогнозирования курса рассматриваемого транспортного средства посредством коррекции базового пути 83M движения.
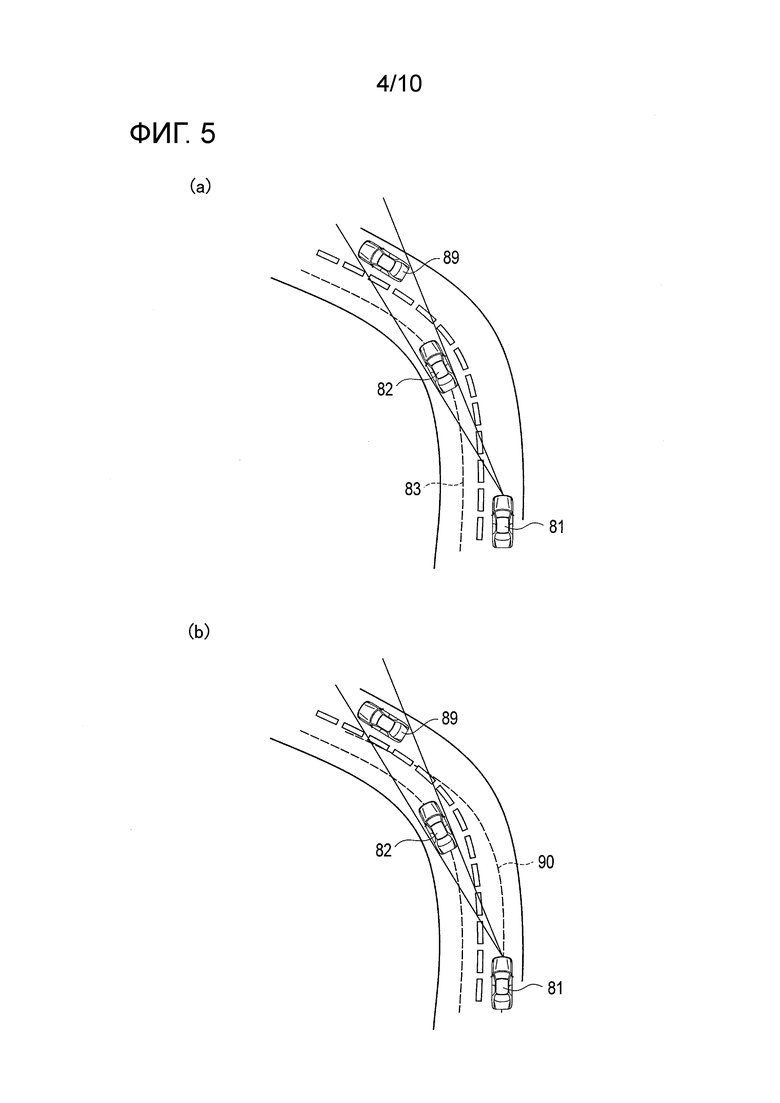
Фиг. 5: часть (a) по фиг. 5 является видом "с высоты птичьего полета", иллюстрирующим ситуацию, когда рассматриваемое транспортное средство 81 не может обнаруживать позицию едущего впереди транспортного средства 89 вследствие расположенного рядом транспортного средства 82, и часть (b) по фиг. 5 является видом "с высоты птичьего полета", иллюстрирующим состояние, в котором форма 90 кривой полосы движения рассматриваемого транспортного средства не может надлежащим образом прогнозироваться.
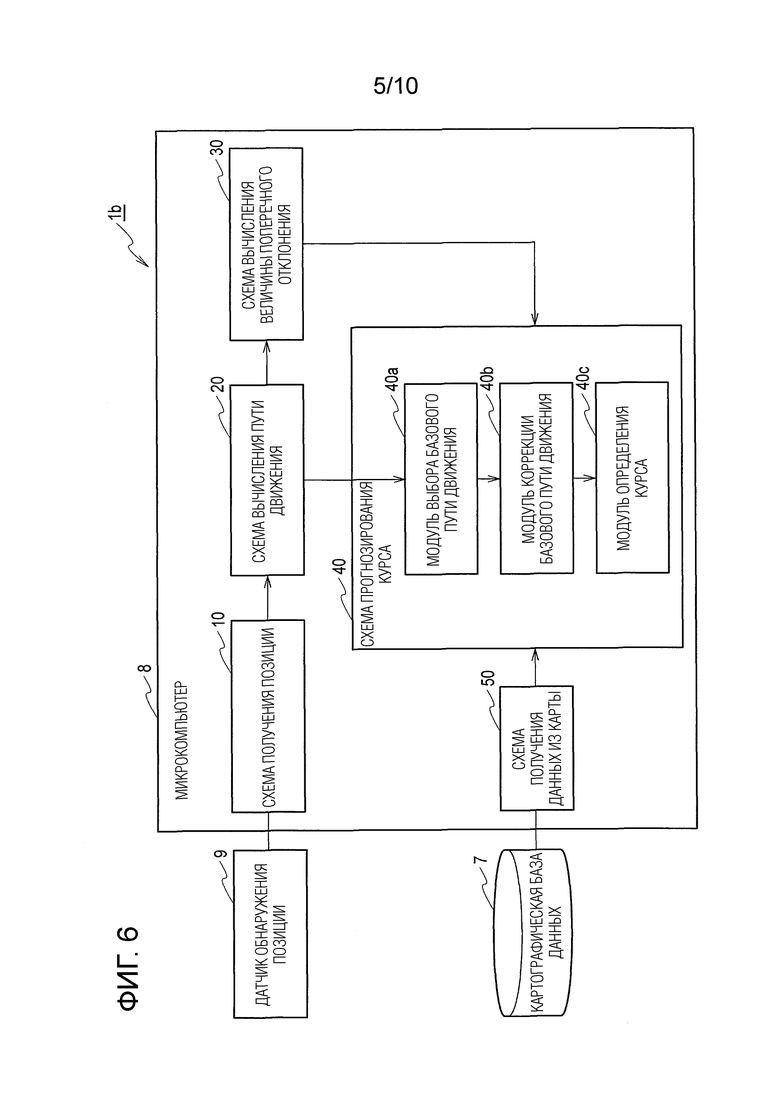
Фиг. 6 является блок-схемой, иллюстрирующей общую конфигурацию устройства 1b прогнозирования курса согласно второму варианту осуществления.
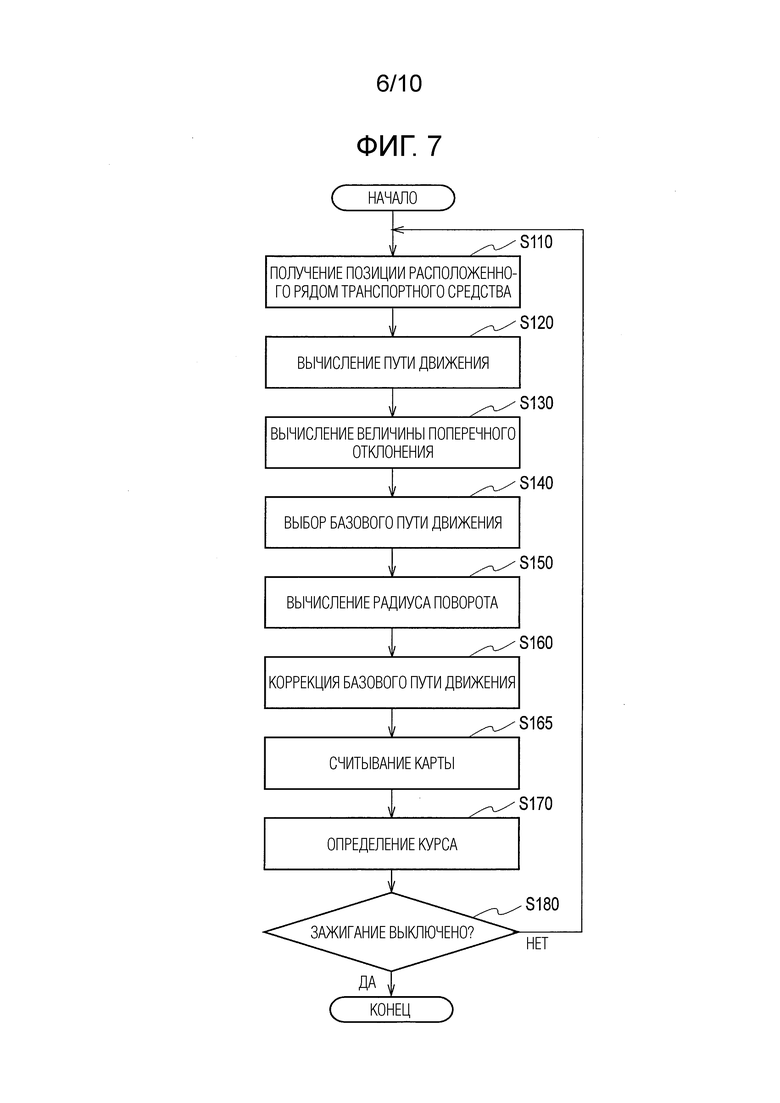
Фиг. 7 является блок-схемой последовательности операций, иллюстрирующей пример способа прогнозирования курса с использованием устройства 1b прогнозирования курса, проиллюстрированного на фиг. 6.
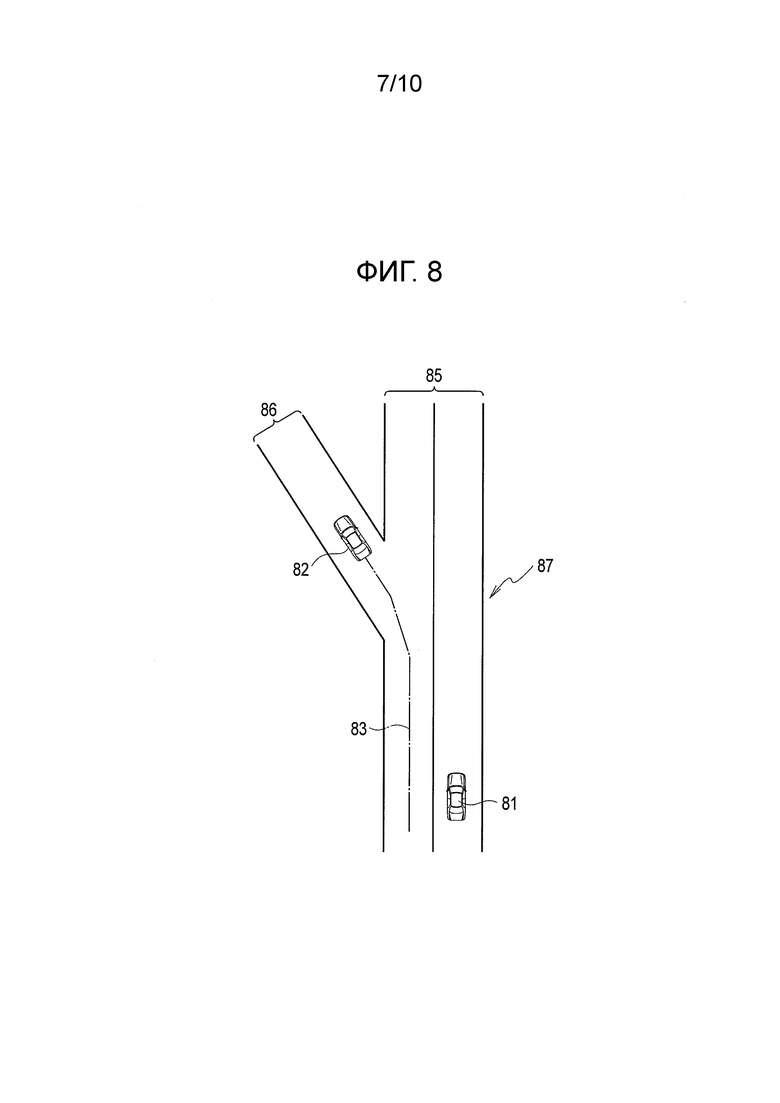
Фиг. 8 является видом "с высоты птичьего полета", иллюстрирующим случай, в котором определяется то, что рассматриваемое транспортное средство 81 проезжает точку 87 разветвления в течение предварительно определенного времени.
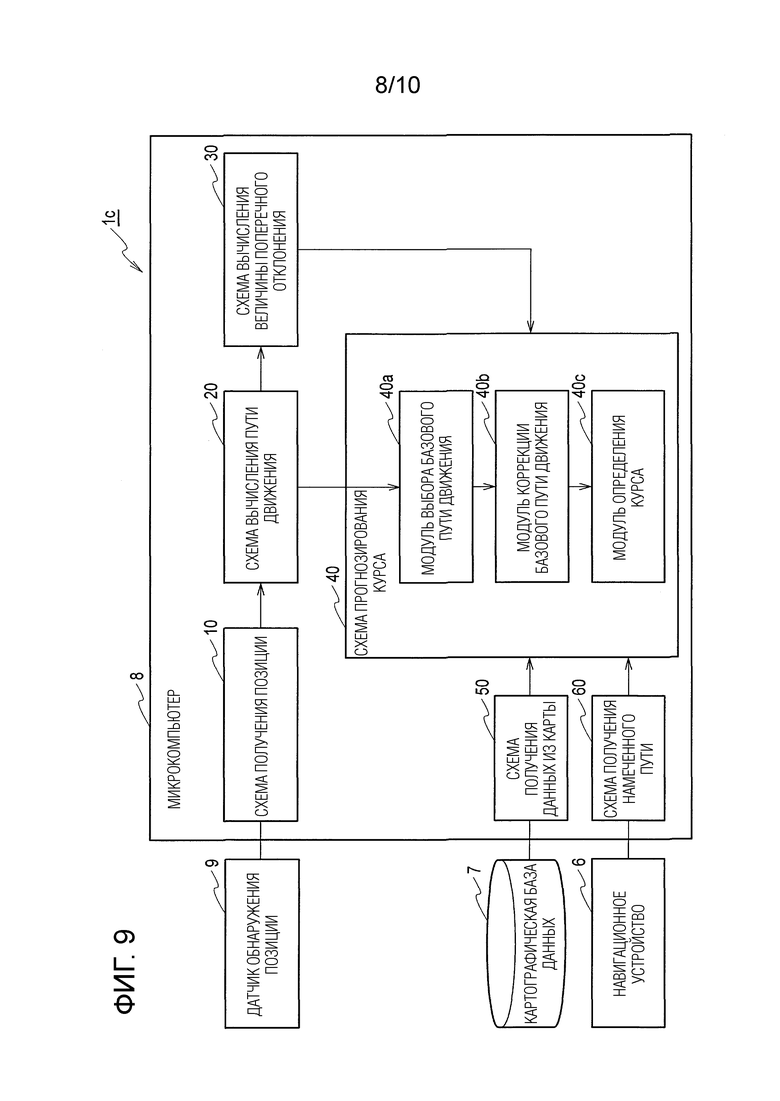
Фиг. 9 является блок-схемой, иллюстрирующей общую конфигурацию устройства 1c прогнозирования курса согласно третьему варианту осуществления.
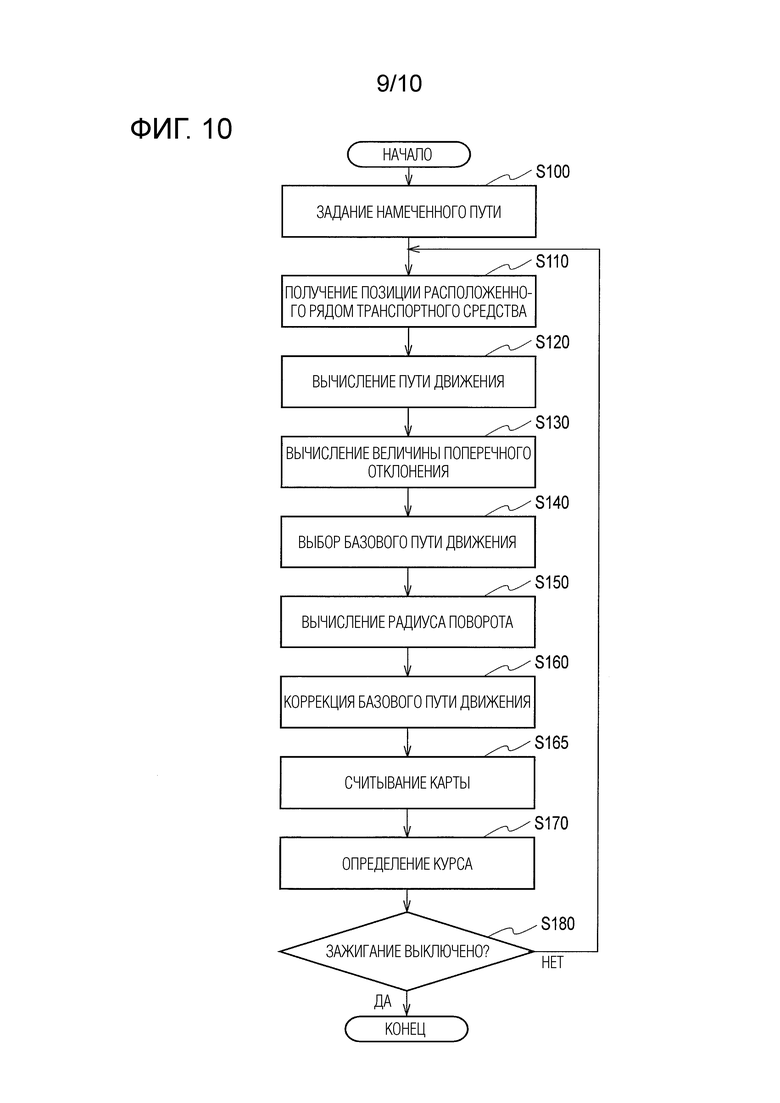
Фиг. 10 является блок-схемой последовательности операций, иллюстрирующей пример способа прогнозирования курса с использованием устройства 1c прогнозирования курса, проиллюстрированного на фиг. 9.
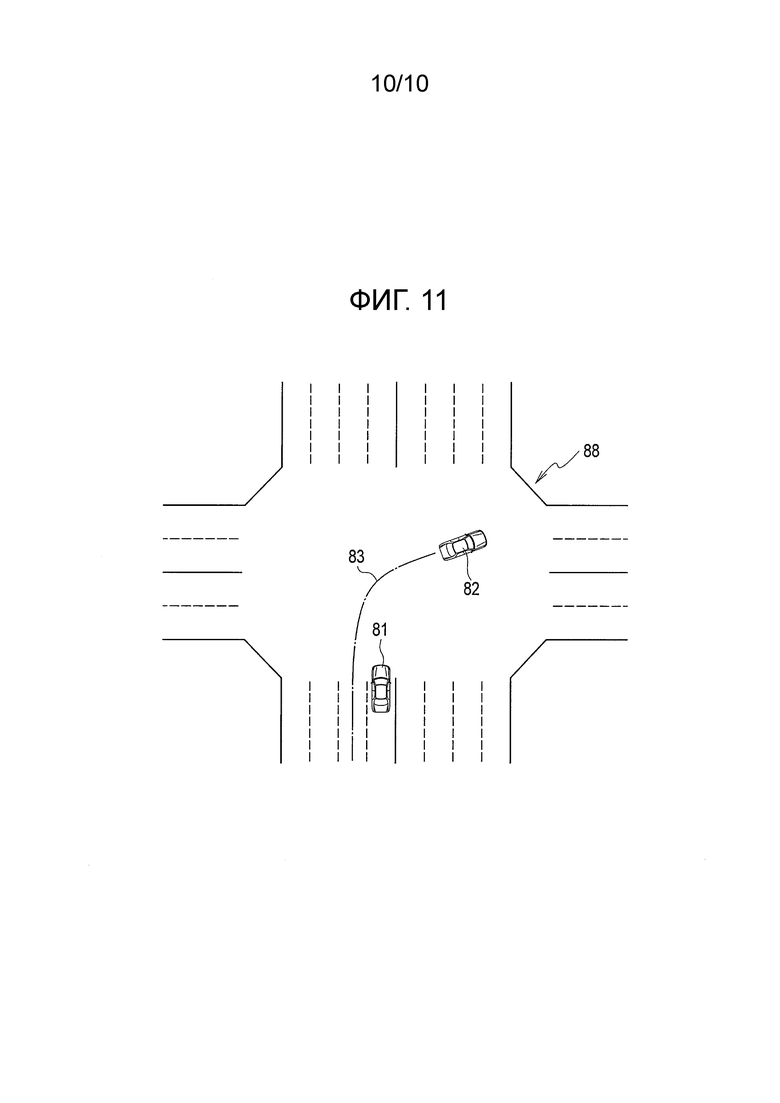
Фиг. 11 является видом "с высоты птичьего полета", иллюстрирующим случай, в котором определяется то, что рассматриваемое транспортное средство 81 проезжает перекресток 88 в течение предварительно определенного времени.
Подробное описание вариантов осуществления
[0009] Первый вариант осуществления
Далее подробно описывается вариант осуществления со ссылкой на чертежи.
[0010] Ниже описывается общая конфигурация устройства 1a прогнозирования курса согласно первому варианту осуществления со ссылкой на фиг. 1. Устройство 1a прогнозирования курса прогнозирует курс рассматриваемого транспортного средства из позиции расположенного рядом транспортного средства. "Расположенное рядом транспортное средство" означает другое транспортное средство, которое движется около рассматриваемого транспортного средства в полосе движения (смежной полосе движения), смежной с полосой движения (полосой движения рассматриваемого транспортного средства), по которой движется рассматриваемое транспортное средство, полосе движения, смежной со смежной полосой движения, и т.п.
[0011] Устройство 1a прогнозирования курса включает в себя датчик 9 обнаружения позиции, который обнаруживает позицию расположенного рядом транспортного средства, и микрокомпьютер 8, который выполняет последовательность информационно-вычислительных процессов, чтобы прогнозировать курс рассматриваемого транспортного средства из позиции расположенного рядом транспортного средства, обнаруженной посредством датчика 9 обнаружения позиции. Датчик 9 обнаружения позиции и микрокомпьютер 8 монтируются в рассматриваемом транспортном средстве и соединяются между собой посредством кабеля для приема и отправки позиции расположенного рядом транспортного средства.
[0012] Конкретные примеры датчика 9 обнаружения позиции включают в себя радар, лазерный радар, лазерный дальномер (LRF) и камеру, но датчик 9 обнаружения позиции не ограничен ими и может использовать другие известные способы. Следует отметить, что средства для получения информации глубины посредством использования камеры включают в себя не только средства с использованием стереокамеры, но также и средства с использованием монокулярной камеры.
[0013] Микрокомпьютер 8 может реализовываться посредством использования микрокомпьютера общего назначения, включающего в себя CPU (центральный процессор), запоминающее устройство и модули ввода и вывода. Компьютерная программа (программа прогнозирования курса) для выполнения последовательности информационно-вычислительных процессов для прогнозирования курса рассматриваемого транспортного средства из позиции расположенного рядом транспортного средства устанавливается в микрокомпьютере 8, и микрокомпьютер 8 выполняет компьютерную программу. Микрокомпьютер 8 ввиду этого функционирует в качестве информационно-вычислительных схем (10, 20, 30, 40), которые выполняют последовательность информационно-вычислительных процессов. Следует отметить, что хотя в этом описании поясняется пример, в котором устройство 1a прогнозирования курса реализуется посредством программного обеспечения, информационно-вычислительные схемы (10, 20, 30, 40), описанные ниже, могут быть сконфигурированы как специализированные аппаратные средства, к примеру, ASIC, вместо микрокомпьютера общего назначения, как и следовало ожидать. Альтернативно, информационно-вычислительные схемы (10, 20, 30, 40), которые в ином случае реализованы посредством микрокомпьютера 8, могут быть сконфигурированы посредством отдельных элементов аппаратных средств. Кроме того, микрокомпьютер 8 может использоваться также в качестве электронного модуля управления (ECU), используемого для другого управления, связанного с транспортным средством.
[0014] Микрокомпьютер 8 функционирует в качестве схемы 10 получения позиции, схемы 20 вычисления пути движения, схемы 30 вычисления величины поперечного отклонения и схемы 40 прогнозирования курса.
[0015] Схема 10 получения позиции получает позицию расположенного рядом транспортного средства. Схема 10 получения позиции может получать позицию расположенного рядом транспортного средства, обнаруженную посредством датчика 9 обнаружения позиции, из датчика 9 обнаружения позиции. Как и следовало ожидать, схема 10 получения позиции может внешне получать информацию, указывающую позицию расположенного рядом транспортного средства, через сеть радиосвязи.
[0016] Схема 20 вычисления пути движения вычисляет путь движения расположенного рядом транспортного средства из предыстории позиции расположенного рядом транспортного средства, полученной посредством схемы 10 получения позиции. В частности, схема 20 вычисления пути движения вычисляет путь движения расположенного рядом транспортного средства посредством соединения позиций расположенного рядом транспортного средства, обнаруженных в несколько последовательных моментов времени. Например, как проиллюстрировано на фиг. 4, схема 20 вычисления пути движения может многократно иллюстрировать позицию (P1, P2, P3, P4, P5,...) расположенного рядом транспортного средства относительно рассматриваемого транспортного средства, которая обнаруживается каждое предварительно определенное время, на карте с учетом направления перемещения и расстояния перемещения рассматриваемого транспортного средства в течение предварительно определенного времени, и выполнять аппроксимацию на кривой для нескольких позиций (точек пути: P1-P5,...), проиллюстрированных на карте. Такая полученная аппроксимирующая кривая 83M формирует путь движения расположенного рядом транспортного средства.
[0017] Схема 30 вычисления величины поперечного отклонения вычисляет позицию (в дальнейшем называемую "поперечной позицией") пути движения, вычисленного посредством схемы 20 вычисления пути движения, относительно рассматриваемого транспортного средства в направлении ширины транспортного средства для рассматриваемого транспортного средства. Например, в двумерной системе координат, в которой начало координат представляет собой рассматриваемое транспортное средство, и направление спереди назад транспортного средства и направление ширины транспортного средства представляют собой ось X и ось Y, соответственно, поперечная позиция может указываться посредством пересечения между путем движения и осью Y, которое представляет собой координату Y отсекаемого отрезка по оси Y. Далее описывается поперечная позиция со ссылкой на фиг. 3.
[0018] Альтернативно, схема 30 вычисления величины поперечного отклонения может определять полосу движения, в которой расположен путь движения, в качестве поперечной позиции пути движения. Например, схема 30 вычисления величины поперечного отклонения обнаруживает разделительную линию, предоставленную на поверхности дороги, посредством использования камеры и т.п., смонтированной в рассматриваемом транспортном средстве, и вычисляет позицию разделительной линии относительно рассматриваемого транспортного средства. Затем схема 30 вычисления величины поперечного отклонения определяет полосу движения, в которой движется расположенное рядом транспортное средство, которая представляет собой полосу движения (смежную полосу движения, полосу движения, смежную со смежной полосой движения, и т.п.), в которой расположен путь движения, на основе позиции разделительной линии и позиции пути движения. Поскольку ширина полосы движения варьируется в зависимости от участка дороги, схема 30 вычисления величины поперечного отклонения может задавать поперечную позицию пути движения, определенную как находящуюся в смежной полосе движения, например, равной 3 м и задавать поперечную позицию пути движения, определенную как находящуюся в полосе движения, смежной со смежной полосой движения, например, равной 6 м, вместо фактически измеренного значения.
[0019] Схема 40 прогнозирования курса прогнозирует курс рассматриваемого транспортного средства посредством увеличения или уменьшения размера пути движения расположенного рядом транспортного средства на основе направления поворота расположенного рядом транспортного средства и поперечной позиции, вычисленной посредством схемы 30 вычисления величины поперечного отклонения. Следует отметить, что схема 40 прогнозирования курса определяет направление поворота расположенного рядом транспортного средства из пути движения расположенного рядом транспортного средства, вычисленного посредством схемы 20 вычисления пути движения. Например, когда путь движения имеет форму правой кривой, схема 40 прогнозирования курса может определять то, что направление поворота является правым, а когда путь движения имеет форму левой кривой, определять то, что направление поворота является левым.
[0020] Схема 40 прогнозирования курса включает в себя модуль 40a выбора базового пути движения, модуль 40b коррекции базового пути движения и модуль 40c определения курса.
[0021] Модуль 40a выбора базового пути движения выбирает путь движения (далее называемый "базовым путем движения"), который должен использоваться в качестве базы при оценке курса, из путей движения нескольких расположенных рядом транспортных средств. Когда схема 10 получения позиции получает позиции нескольких расположенных рядом транспортных средств, несколько путей движения и несколько поперечных позиций вычисляются. В этом случае, модуль 40a выбора базового пути движения выбирает путь движения, подходящий для оценки курса, на основе поперечных позиций путей движения. Далее описывается выбор базового пути движения со ссылкой на фиг. 3.
[0022] Модуль 40b коррекции базового пути движения корректирует базовый путь движения, выбранный посредством модуля 40a выбора базового пути движения, на основе направления поворота расположенного рядом транспортного средства и поперечной позиции базового пути движения. Далее описывается коррекция базового пути движения со ссылкой на фиг. 4.
[0023] Модуль 40c определения курса задает базовый путь движения, скорректированный посредством модуля 40b коррекции базового пути движения, в качестве курса рассматриваемого транспортного средства.
[0024] Ниже подробно описываются поперечные позиции (Di, Dj) путей (83i, 83j) движения и способ выбора базового пути движения со ссылкой на фиг. 3. В примере, проиллюстрированном на фиг. 3, схема 10 получения позиции получает позиции нескольких расположенных рядом транспортных средств (82i, 82j), и схема 20 вычисления пути движения вычисляет пути (83i, 83j) движения соответствующих расположенных рядом транспортных средств (82i, 82j). Затем схема 30 вычисления величины поперечного отклонения вычисляет поперечные позиции (Di, Dj) соответствующих путей (83i, 83j) движения относительно рассматриваемого транспортного средства 81. Следует отметить, что поскольку пути (83i, 83j) движения имеют формы левой кривой, как проиллюстрировано на фиг. 3, схема 40 прогнозирования курса определяет то, что направления поворота расположенных рядом транспортных средств являются левыми.
[0025] Модуль 40a выбора базового пути движения выбирает базовый путь движения из нескольких путей (83i, 83j) движения на основе поперечных позиций (Di, Dj) путей движения. В частности, модуль 40a выбора базового пути движения выбирает путь (83i, 83j) движения расположенного рядом транспортного средства, отстоящий от рассматриваемого транспортного средства 81 на расстояние, меньшее предварительно определенного опорного расстояния, в качестве базового пути движения. Например, когда имеются несколько расположенных рядом транспортных средств, модуль 40a выбора базового пути движения выбирает пути (83i, 83j) движения, абсолютные значения поперечных позиций (Di, Dj) которых меньше первого опорного расстояния (3 м), из нескольких путей движения, с тем чтобы выбирать базовый путь движения из путей движения расположенных рядом транспортных средств в полосе движения рассматриваемого транспортного средства и смежной полосе движения. Когда абсолютные значения поперечных позиций (Di, Dj) нескольких путей (83i, 83j) движения меньше первого опорного расстояния (3 м), модуль 40a выбора базового пути движения выбирает путь движения расположенного рядом транспортного средства (82i, 82j), расстояние которого от рассматриваемого транспортного средства 81 меньше второго опорного расстояния, из нескольких путей (83i, 83j) движения. Здесь, "расстояние расположенного рядом транспортного средства (82i, 82j) от рассматриваемого транспортного средства 81" представляет собой понятие, включающее в себя не только расстояние в направлении ширины транспортного средства, но также и расстояние в направлении движения. Например, модуль 40a выбора базового пути движения выбирает путь 83j движения расположенного рядом транспортного средства 82j, ближайшего к рассматриваемому транспортному средству 81, в качестве базового пути движения, из путей (83i, 83j) движения, абсолютные значения поперечных позиций (Di, Dj) которых меньше первого опорного расстояния (3 м).
[0026] Альтернативно, модуль 40a выбора базового пути движения может выбирать путь 83j движения, абсолютное значение поперечной позиции (Di, Dj) которого является наименьшим, в качестве базового пути движения. В этом случае, модуль 40a выбора базового пути движения не рассматривает "расстояние расположенного рядом транспортного средства (82i, 82j) от рассматриваемого транспортного средства 81". В качестве другой альтернативы, модуль 40a выбора базового пути движения может выбирать путь движения "расположенного рядом транспортного средства (82i, 82j), расстояние которого от рассматриваемого транспортного средства 81" является наименьшим, в качестве базового пути движения. В этом случае, модуль 40a выбора базового пути движения не рассматривает "абсолютные значения поперечных позиций (Di, Dj)".
[0027] Следует отметить, что когда полоса движения (смежная полоса движения, полоса движения, смежная со смежной полосой движения и т.п.), в которой расположен каждый путь движения, используется в качестве поперечной позиции пути движения, например, модуль 40a выбора базового пути движения выбирает путь движения, расположенный в смежной полосе движения, и не выбирает путь движения, расположенный в полосе движения, смежной со смежной полосой движения.
[0028] Ниже описывается пример конкретного способа прогнозирования курса рассматриваемого транспортного средства 81 посредством коррекции базового пути 83M движения ссылкой на фиг. 4. Модуль 40b коррекции базового пути движения увеличивает или уменьшает размер базового пути 83M движения, выбранного посредством модуля 40a выбора базового пути движения, на основе направления поворота расположенного рядом транспортного средства и поперечной позиции DM базового пути 83M движения.
[0029] Во-первых, модуль 40b коррекции базового пути движения вычисляет радиус R поворота и центр 84 поворота в каждой из точек (P1-P5,...) пути. Например, модуль 40b коррекции базового пути движения вычисляет радиус R поворота и координаты центра 84 поворота посредством использования точки P3 пути, представляющей цель вычисления, и точек перед и после точки P3 пути, посредством метода наименьших квадратов и т.п. Модуль 40b коррекции базового пути движения вычисляет радиус R поворота и центр 84 поворота для каждой из точек (P1-P5,...) пути аналогично.
[0030] Затем, модуль 40b коррекции базового пути движения увеличивает радиус R поворота вокруг центра 84 поворота в каждой точке (P1-P5,...) пути до радиуса (R+DM) поворота или уменьшает радиус R поворота до радиуса (R-DM) поворота. Модуль 40b коррекции базового пути движения определяет то, следует увеличивать или уменьшать радиус R поворота, на основе направления поворота и поперечной позиции DM базового пути 83M движения.
[0031] Например, аналогично пути 83j движения по фиг. 3, когда направление поворота является левым, и поперечная позиция Di пути 83j движения находится на левой стороне рассматриваемого транспортного средства 81, рассматриваемое транспортное средство 81 расположено за пределами пути 83j движения расположенного рядом транспортного средства 82i в направлении поворота. В этом случае, как показано на фиг. 4, радиус поворота в каждой точке (P1-P5,...) пути для пути 83j движения увеличивается до радиуса (R+Di) поворота.
[0032] Между тем, аналогично пути 83j движения по фиг. 3, когда направление поворота является левым, и поперечная позиция Dj пути 83j движения находится на правой стороне рассматриваемого транспортного средства 81, рассматриваемое транспортное средство 81 расположено внутри пути 83j движения расположенного рядом транспортного средства 82j в направлении поворота. В этом случае, в отличие от фиг. 4, радиус поворота в каждой точке (P1-P5,...) пути для пути 83j движения уменьшается до радиуса (R-Dj) поворота.
[0033] Как описано выше, модуль 40b коррекции базового пути движения изменяет расстояние (радиус поворота) от центра 84 поворота до каждой точки (P1-P5,...) пути без изменения центра 84 поворота. Когда рассматриваемое транспортное средство 81 расположено за пределами пути движения в направлении поворота, модуль 40b коррекции базового пути движения увеличивает радиус поворота, а когда рассматриваемое транспортное средство 81 расположено внутри пути движения, уменьшает радиус поворота. Затем модуль 40b коррекции базового пути движения выполняет аппроксимацию на кривой снова для точек (P3') пути, подвергнутых увеличению или уменьшению радиуса поворота, и ввиду этого может корректировать базовый путь 83M движения.
[0034] Чем больше радиус R поворота базового пути 83M движения, тем меньшей задается степень увеличения или уменьшения посредством модуля 40b коррекции базового пути движения. Другими словами, при условии, что поперечная позиция D является постоянной, чем больше радиус R поворота, тем меньше коэффициент увеличения (=(R+DM)/R) и коэффициент уменьшения (=(R-DM)/R).
[0035] Чем больше расстояние от рассматриваемого транспортного средства 81 до поперечной позиции DM расположенного рядом транспортного средства 82, тем большей задается степень увеличения или уменьшения посредством модуля 40b коррекции базового пути движения. Другими словами, при условии, что радиус R поворота является постоянным, чем больше абсолютное значение поперечной позиции DM, тем больше коэффициент увеличения и коэффициент уменьшения.
[0036] В первом варианте осуществления, модуль 40c определения курса определяет базовый путь 91 движения, скорректированный посредством модуля 40b коррекции базового пути движения, в качестве курса рассматриваемого транспортного средства как есть.
[0037] Ниже описывается пример способа прогнозирования курса с использованием устройства 1a прогнозирования курса, проиллюстрированного на фиг. 1, со ссылкой на блок-схему последовательности операций способа по фиг. 2. Здесь, описываются этапы работы микрокомпьютера 8 в устройстве 1a прогнозирования курса, проиллюстрированном на фиг. 1. Обработка, проиллюстрированная на фиг. 2, многократно выполняется в предварительно определенном цикле.
[0038] Во-первых, на этапе S110, схема 10 получения позиции получает позицию каждого расположенного рядом транспортного средства.
[0039] При переходе к этапу S120, как проиллюстрировано на фиг. 4, схема 20 вычисления пути движения вычисляет путь движения (аппроксимирующую кривую 83M) каждого расположенного рядом транспортного средства из предыстории (точек движения: P1-P5,...) позиции расположенного рядом транспортного средства, полученной посредством схемы 10 получения позиции.
[0040] При переходе к этапу S130, как проиллюстрировано на фиг. 3, схема 30 вычисления величины поперечного отклонения вычисляет поперечную позицию (Di, Dj) каждого пути (83i, 83j) движения, вычисленного посредством схемы 20 вычисления пути движения относительно рассматриваемого транспортного средства 81.
[0041] При переходе к этапу S140, как проиллюстрировано на фиг. 3, модуль 40a выбора базового пути движения выбирает базовый путь движения из нескольких путей (83i, 83j) движения на основе поперечных позиций (Di, Dj) путей движения. Например, модуль 40a выбора базового пути движения выбирает пути (83i, 83j) движения, абсолютные значения поперечных позиций (Di, Dj) которых меньше первого опорного расстояния (3 м), и выбирает путь 83j движения расположенного рядом транспортного средства 82j, ближайшего к рассматриваемому транспортному средству 81, в качестве базового пути 83M движения. Тем не менее, способ выбора базового пути движения не ограничен этим, и могут использоваться другие способы, описанные выше. Следует отметить, что выбор базового пути движения может выполняться только тогда, когда позиции нескольких расположенных рядом транспортных средств получаются на этапе S110. Когда позиция только одного расположенного рядом транспортного средства получается, модуль 40a выбора базового пути движения может выбирать путь движения этого расположенного рядом транспортного средства в качестве базового пути движения. Кроме того, когда нет пути движения, абсолютное значение поперечной позиции которого меньше первого опорного расстояния, обработка может прерываться и повторно начинаться с этапа S110, либо путь движения, абсолютное значение поперечной позиции которого является наименьшим, может выбираться в качестве базового пути движения.
[0042] При переходе к этапу S150, как проиллюстрировано на фиг. 4, модуль 40b коррекции базового пути движения вычисляет радиус R поворота и центр 84 поворота в каждой точке (P1-P5,...) пути.
[0043] При переходе к этапу S160, как проиллюстрировано на фиг. 4, модуль 40b коррекции базового пути движения увеличивает радиус R поворота вокруг центра 84 поворота в каждой точке (P1-P5,...) пути до радиуса (R+DM) поворота или уменьшает радиус R поворота до радиуса (R-DM) поворота. Модуль 40b коррекции базового пути движения определяет то, следует увеличивать или уменьшать радиус R поворота, на основе направления поворота и поперечной позиции базового пути 83M движения. Затем модуль 40b коррекции базового пути движения выполняет аппроксимацию на кривой снова для точек (P3') пути, подвергнутых увеличению или уменьшению радиуса поворота, и ввиду этого корректирует базовый путь 83M движения.
[0044] Переходя к этапу S170, модуль 40c определения курса определяет базовый путь 91 движения, скорректированный посредством модуля 40b коррекции базового пути движения, в качестве курса рассматриваемого транспортного средства как есть.
[0045] Переходя к этапу S180, микрокомпьютер 8 определяет то, выключается или нет переключатель зажигания рассматриваемого транспортного средства 81, и многократно выполняет этапы S110-S170, описанные выше, в предварительно определенном цикле, до тех пор, пока не будет выключен переключатель зажигания. Когда переключатель зажигания выключается ("Да" на этапе S180), вышеуказанный цикл обработки завершается.
[0046] Как описано выше, в первом варианте осуществления, получаются следующие операции и преимущества.
[0047] Микрокомпьютер 8 прогнозирует курс рассматриваемого транспортного средства 81 посредством увеличения или уменьшения размера пути (83i, 83j) движения расположенного рядом транспортного средства (82i, 82j). Микрокомпьютер 8 ввиду этого может прогнозировать курс рассматриваемого транспортного средства 81 посредством использования пути (83i, 83j) движения расположенного рядом транспортного средства (82i, 82j), движущегося в полосе движения, отличной от полосы движения рассматриваемого транспортного средства. Например, как проиллюстрировано в части (a) по фиг. 5, предположим ситуацию, когда рассматриваемое транспортное средство 81 не может обнаруживать позицию едущего впереди транспортного средства 89 вследствие расположенного рядом транспортного средства 82 и т.п. Форма кривой пути движения (смежной полосы движения) расположенного рядом транспортного средства 82 отличается от формы кривой пути движения (полосы движения рассматриваемого транспортного средства) едущего впереди транспортного средства 89. Соответственно, когда применяется традиционный способ прогнозирования курса рассматриваемого транспортного средства 81 из пути движения едущего впереди транспортного средства 89, как проиллюстрировано в части (b) по фиг. 5, форма 90 кривой полосы движения рассматриваемого транспортного средства не может надлежащим образом прогнозироваться. В первом варианте осуществления, также в ситуации, проиллюстрированной в части (a) по фиг. 5, микрокомпьютер 8 может точно прогнозировать форму кривой рассматриваемого транспортного средства 81 посредством использования пути 83 движения расположенного рядом транспортного средства 82, движущегося в смежной полосе движения и т.п.
[0048] Как проиллюстрировано на фиг. 4, чем больше радиус поворота пути 83M движения, тем меньшей задается степень увеличения или уменьшения посредством модуля 40b коррекции базового пути движения. Модуль 40b коррекции базового пути движения ввиду этого может надлежащим образом прогнозировать курс в зависимости от формы кривой.
[0049] Как проиллюстрировано на фиг. 4, чем больше расстояние от рассматриваемого транспортного средства 81 до поперечной позиции DM расположенного рядом транспортного средства 82, тем большей задается степень увеличения или уменьшения посредством модуля 40b коррекции базового пути движения. Модуль 40b коррекции базового пути движения ввиду этого может надлежащим образом прогнозировать курс также тогда, когда полоса движения, в которой движется рассматриваемое транспортное средство 81, отличается от полосы движения, в которой движется расположенное рядом транспортное средство 82 (смежной полосы движения или полосы движения, смежной со смежной полосой движения).
[0050] Микрокомпьютер 8 прогнозирует курс на основе пути (83i, 83j) движения расположенного рядом транспортного средства, расстояние которого от рассматриваемого транспортного средства 81 является наименьшим. Чем ближе позиция расположенного рядом транспортного средства (82i, 82j) к рассматриваемому транспортному средству 81, тем выше точность обнаружения этой позиции. Соответственно, микрокомпьютер 8 прогнозирует курс на основе пути (83i, 83j) движения расположенного рядом транспортного средства (82i, 82j), расстояние которого от рассматриваемого транспортного средства 81 является наименьшим, и ввиду этого может надлежащим образом прогнозировать курс из высокоточного пути (83i, 83j) движения.
[0051] Кроме того, микрокомпьютер 8 прогнозирует курс на основе пути 83j движения расположенного рядом транспортного средства в полосе движения, смежной с полосой движения, в которой движется рассматриваемое транспортное средство 81. Микрокомпьютер 8 ввиду этого может надлежащим образом прогнозировать курс из высокоточного пути 83j движения.
[0052] Второй вариант осуществления
Ниже описывается общая конфигурация устройства 1b прогнозирования курса согласно второму варианту осуществления со ссылкой на фиг. 6. Устройство 1b прогнозирования курса получает картографическую информацию, включающую в себя, по меньшей мере, информацию разветвления дорог, и не прогнозирует курс рассматриваемого транспортного средства при определении того, что рассматриваемое транспортное средство 81 должно проезжать точку разветвления. Когда устройство 1b прогнозирования курса определяет то, что рассматриваемое транспортное средство 81 не должно проезжать точку разветвления, модуль 40c определения курса определяет базовый путь 91 движения, скорректированный посредством модуля 40b коррекции базового пути движения, в качестве курса рассматриваемого транспортного средства.
[0053] Как проиллюстрировано на фиг. 6, устройство 1b прогнозирования курса дополнительно включает в себя картографическую базу 7 данных. Картографическая база 7 данных и микрокомпьютер 8 монтируются в рассматриваемом транспортном средстве 81 и соединены между собой посредством кабеля для приема и отправки картографической информации, включающей в себя, по меньшей мере, информацию разветвления дорог.
[0054] Микрокомпьютер 8 функционирует не только в качестве информационно-вычислительных схем (10, 20, 30, 40), но также и в качестве схемы 50 получения данных из карты. Схема 50 получения данных из карты получает картографическую информацию, включающую в себя, по меньшей мере, информацию разветвления дорог, из картографической базы 7 данных.
[0055] Другие конфигурации устройства 1b прогнозирования курса являются идентичными конфигурациям устройства 1a прогнозирования курса на фиг. 1, и их описание опускается.
[0056] Ниже описывается пример способа прогнозирования курса с использованием устройства 1b прогнозирования курса, проиллюстрированного на фиг. 6, со ссылкой на блок-схему последовательности операций способа по фиг. 7. Здесь, описываются этапы работы микрокомпьютера 8 в устройстве 1b прогнозирования курса, проиллюстрированном на фиг. 6. Обработка, проиллюстрированная на фиг. 7, многократно выполняется в предварительно определенном цикле.
[0057] По сравнению с фиг. 2, блок-схема последовательности операций способа по фиг. 7 дополнительно включает в себя этап S165 и отличается по содержимому этапа S170. Содержимое обработки на этапах S110-S160 и S180 на фиг. 7 является идентичным содержимому обработки на фиг. 2, и его описание опускается.
[0058] После этапа S160, обработка переходит к этапу S165, и схема 50 получения данных из карты получает картографическую информацию, включающую в себя, по меньшей мере, информацию разветвления дорог, из картографической базы 7 данных. В частности, схема 50 получения данных из карты считывает картографическую информацию, включающую в себя информацию разветвления дороги, по которой движется рассматриваемое транспортное средство 81, из картографической базы 7 данных.
[0059] Переходя к этапу S170, модуль 40c определения курса прогнозирует курс рассматриваемого транспортного средства из скорректированного базового пути 91 движения, картографической информации и абсолютного значения поперечной позиции DM. Модуль 40c определения курса определяет то, должно или нет рассматриваемое транспортное средство 81 проезжать точку разветвления в течение предварительно определенного времени. В частности, как проиллюстрировано на фиг. 8, модуль 40c определения курса определяет то, включает или нет дорога, по которой движется рассматриваемое транспортное средство 81, в себя точку (точку 87 разветвления), в которой дорога разветвляется на две или более дорог (85, 86) впереди рассматриваемого транспортного средства 81 в пределах предварительно определенного расстояния от него. Когда модуль 40c определения курса определяет то, что абсолютное значение поперечной позиции DM базового пути 83M движения составляет третье опорное расстояние (1,5 м) или более, и то, что рассматриваемое транспортное средство 81 должно проезжать точку 87 разветвления в течение предварительно определенного времени, модуль 40c определения курса не прогнозирует курс рассматриваемого транспортного средства 81. В частности, когда модуль 40c определения курса определяет то, что расположенное рядом транспортное средство, для которого может вычисляться путь движения, движется в полосе движения, отличной от полосы движения рассматриваемого транспортного средства (расстояние до поперечной позиции DM составляет третье опорное расстояние (1,5 м) или больше), и то, что рассматриваемое транспортное средство 81 должно проезжать точку 87 разветвления, модуль 40c определения курса не задает базовый путь 91 движения, скорректированный посредством модуля 40b коррекции базового пути движения, в качестве курса рассматриваемого транспортного средства 81. Между тем, когда модуль 40c определения курса определяет то, что абсолютное значение поперечной позиции DM базового пути 83M движения меньше третьего опорного расстояния (1,5 м), или то, что рассматриваемое транспортное средство 81 не должно проезжать точку 87 разветвления в течение предварительно определенного времени, модуль 40c определения курса задает базовый путь 91 движения, скорректированный посредством модуля 40b коррекции базового пути движения, в качестве курса рассматриваемого транспортного средства 81. В частности, когда модуль 40c определения курса определяет то, что расположенное рядом транспортное средство, для которого может вычисляться путь движения, движется в полосе движения рассматриваемого транспортного средства (расстояние до поперечной позиции DM меньше третьего опорного расстояния (1,5 м)), или то, что рассматриваемое транспортное средство 81 не должно проезжать точку разветвления, модуль 40c определения курса задает базовый путь 91 движения, скорректированный посредством модуля 40b коррекции базового пути движения, в качестве курса рассматриваемого транспортного средства 81.
[0060] Как описано выше, во втором варианте осуществления, курс не прогнозируется, когда рассматриваемое транспортное средство 81 должно проезжать точку 87 разветвления. Соответственно, как проиллюстрировано на фиг. 8, ошибочное прогнозирование курса может предотвращаться, когда расположенное рядом транспортное средство 82 выезжает в направлении (по дороге 86), отличающемся от курса (дороги 85) рассматриваемого транспортного средства 81 в точке 87 разветвления. В частности, когда путь 83 движения расположенного рядом транспортного средства и курс рассматриваемого транспортного средства расположены на различных дорогах (85, 86) от точки 87 разветвления, модуль 40c определения курса предотвращает задание скорректированного базового пути 91 движения в качестве курса рассматриваемого транспортного средства 81. Ошибочное прогнозирование курса ввиду этого может не допускаться.
[0061] Следует отметить, что на этапе S170, модуль 40c определения курса может определять курс только на основе присутствия или отсутствия точки 87 разветвления. Например, вне зависимости от того, где находится позиция полосы движения расположенного рядом транспортного средства, для которого может вычисляться путь движения, модуль 40c определения курса не может прогнозировать курс рассматриваемого транспортного средства 81 независимо от поперечной позиции DM базового пути 83M движения при определении того, что рассматриваемое транспортное средство 81 должно проезжать точку 87 разветвления в течение предварительно определенного времени.
[0062] Третий вариант осуществления
Ниже описывается общая конфигурация устройства 1c прогнозирования курса согласно третьему варианту осуществления со ссылкой на фиг. 9. Устройство 1c прогнозирования курса получает, по меньшей мере, информацию намеченного пути движения рассматриваемого транспортного средства 81 на карте и прогнозирует курс на основе пути 83 движения расположенного рядом транспортного средства 82, аналогичного намеченному пути движения рассматриваемого транспортного средства 81. Модуль 40c определения курса определяет базовый путь 91 движения, скорректированный посредством модуля 40b коррекции базового пути движения, в качестве курса рассматриваемого транспортного средства только тогда, когда скорректированный базовый путь 91 движения определяется как аналогичный намеченному пути движения рассматриваемого транспортного средства 81.
[0063] Как проиллюстрировано на фиг. 9, устройство 1c прогнозирования курса дополнительно включает в себя навигационное устройство 6. Навигационное устройство 6, картографическая база 7 данных и микрокомпьютер 8 монтируются в рассматриваемом транспортном средстве 81. Навигационное устройство 6 и микрокомпьютер 8 соединяются между собой посредством кабеля для приема и отправки информации намеченного пути движения рассматриваемого транспортного средства 81.
[0064] Микрокомпьютер 8 функционирует не только в качестве информационно-вычислительных схем (10, 20, 30, 40, 50), но также и в качестве схемы 60 получения намеченного пути. Схема 60 получения намеченного пути получает информацию намеченного пути движения рассматриваемого транспортного средства 81 из навигационного устройства 6. Кроме того, схема 50 получения данных из карты получает картографическую информацию, включающую в себя информацию разветвления дорог, информацию по перекрестку и информацию формы (включающую в себя информацию радиуса поворота) дорог.
[0065] Другие конфигурации устройства 1c прогнозирования курса являются идентичными конфигурациям устройства 1b прогнозирования курса на фиг. 6, и их описание опускается.
[0066] Ниже описывается пример способа прогнозирования курса с использованием устройства 1c прогнозирования курса, проиллюстрированного на фиг. 9, со ссылкой на блок-схему последовательности операций способа по фиг. 10. Здесь, описываются этапы работы микрокомпьютера 8 в устройстве 1c прогнозирования курса, проиллюстрированном на фиг. 9. Обработка, проиллюстрированная на фиг. 10, многократно выполняется в предварительно определенном цикле.
[0067] По сравнению с фиг. 7, блок-схема последовательности операций способа по фиг. 10 дополнительно включает в себя этап S100 и отличается по содержимому этапа S170. Содержимое обработки на этапах S110-S160 и S180 на фиг. 10 является идентичным содержимому обработки на фиг. 7, и его описание опускается.
[0068] На этапе S100, схема 60 получения намеченного пути получает информацию намеченного пути движения рассматриваемого транспортного средства 81 из навигационного устройства 6. Затем обработка переходит к этапу S110.
[0069] На этапе S170, когда модуль 40c определения курса определяет то, что абсолютное значение поперечной позиции DM базового пути 83M движения составляет третье опорное расстояние или более, и то, что рассматриваемое транспортное средство 81 должно проезжать точку 87 разветвления, модуль 40c определения курса не задает скорректированный базовый путь 91 движения в качестве курса рассматриваемого транспортного средства 81. Это является идентичным второму варианту осуществления.
[0070] В третьем варианте осуществления, на этапе S170, модуль 40c определения курса дополнительно определяет то, представляет собой точка 87 разветвления или нет перекресток 88. После этого, когда точка 87 разветвления представляет собой перекресток 88, модуль 40c определения курса определяет то, является или нет базовый путь 91 движения, скорректированный на этапе S160, аналогичным намеченному пути движения рассматриваемого транспортного средства 81, полученному на этапе S100.
[0071] После этого, когда модуль 40c определения курса определяет то, что точка 87 разветвления представляет собой перекресток 88, и то, что скорректированный базовый путь 91 движения является аналогичным намеченному пути движения рассматриваемого транспортного средства 81, модуль 40c определения курса задает базовый путь 91 движения, скорректированный на этапе S160, в качестве курса рассматриваемого транспортного средства 81.
[0072] Следует отметить, что даже если модуль 40c определения курса определяет то, что точка 87 разветвления представляет собой перекресток 88, и то, что скорректированный базовый путь 91 движения является аналогичным намеченному пути движения рассматриваемого транспортного средства 81, модуль 40c определения курса не может задавать скорректированный базовый путь 91 движения в качестве курса рассматриваемого транспортного средства 81, когда устанавливается следующее условие. В частности, модуль 40c определения курса не может задавать скорректированный базовый путь 91 движения в качестве курса рассматриваемого транспортного средства 81, когда состояние, в котором абсолютное значение поперечной позиции DM базового пути 83M движения составляет третье опорное расстояние (1,5 м) или более, продолжается в течение предварительно определенного времени (например, 5 секунд) или больше.
[0073] Как описано выше, в третьем варианте осуществления, поскольку путь движения расположенного рядом транспортного средства, аналогичный намеченному пути движения рассматриваемого транспортного средства 81, используется, курс может надлежащим образом прогнозироваться посредством использования пути движения расположенного рядом транспортного средства, который идет параллельно намеченному пути движения рассматриваемого транспортного средства 81.
[0074] Хотя третий вариант осуществления описывается в качестве примера на основе второго варианта осуществления, третий вариант осуществления может выполняться на основе первого варианта осуществления. В частности, на этапе S170, модуль 40c определения курса определяет то, является или нет базовый путь 91 движения, скорректированный на этапе S160, аналогичным намеченному пути движения рассматриваемого транспортного средства 81, полученному на этапе S100. Когда базовый путь 91 движения не является аналогичным, модуль 40c определения курса не задает базовый путь 91 движения, скорректированный посредством модуля 40b коррекции базового пути движения, в качестве курса рассматриваемого транспортного средства. Между тем, когда базовый путь 91 движения является аналогичным, модуль 40c определения курса задает базовый путь 91 движения, скорректированный посредством модуля 40b коррекции базового пути движения, в качестве курса рассматриваемого транспортного средства.
[0075] На этапе S170, модуль 40c определения курса не определяет то, составляет или нет абсолютное значение поперечной позиции DM третье опорное расстояние или больше, то, проезжает или нет рассматриваемое транспортное средство 81 точку 87 разветвления, либо то, представляет собой точка 87 разветвления или нет перекресток 88. Этап S165 (считывание карты) также является необязательным.
[0076] Следует отметить, что устройство (1a, 1b, 1c) прогнозирования курса не может включать в себя датчик 9 обнаружения позиции. В этом случае, например, устройство (1a-1c) прогнозирования курса включает в себя модуль радиосвязи, и схема 10 получения позиции может внешне получать информацию, указывающую позицию расположенного рядом транспортного средства, через сеть радиосвязи. Аналогично, устройство (1a-1c) прогнозирования курса может не включать в себя ни картографическую базу 7 данных, ни навигационное устройство 6. В этом случае, например, схема 50 получения данных из карты и схема 60 получения намеченного пути могут извне получать картографическую информацию и информацию намеченного пути движения через компьютерную сеть.
[0077] Кроме того, устройство (1a-1c) прогнозирования курса может не монтироваться в рассматриваемом транспортном средстве 81. Например, устройство (1a-1c) прогнозирования курса может представлять собой внутренний интерфейс (непосредственно облако) в модели облачных вычислений. Рассматриваемое транспортное средство 81, представляющее собой внешний интерфейс, соединяется с устройством (1a-1c) прогнозирования курса, представляющим собой внутренний интерфейс, через такую сеть, как Интернет. Устройство (1a-1c) прогнозирования курса может прогнозировать курс рассматриваемого транспортного средства 81 посредством получения информации, указывающей позицию расположенного рядом транспортного средства 82, непосредственно из расположенного рядом транспортного средства 82 или из рассматриваемого транспортного средства 81 (результата обнаружения датчика 9 обнаружения позиции), чтобы прогнозировать курс рассматриваемого транспортного средства 81 и предоставлять прогнозированный курс в рассматриваемое транспортное средство 81 через сеть.
[0078] Функции, описанные в вышеуказанных вариантах осуществления, могут реализовываться посредством одной или более схем обработки. Схема обработки включает в себя программируемое обрабатывающее устройство, к примеру, обрабатывающее устройство, включающее в себя электрическую схему. Кроме того, обрабатывающее устройство включает в себя такие устройства, как специализированную интегральную схему (ASIC) и традиционные схемные части, которые сконструированы с возможностью выполнять функции, описанные в вариантах осуществления.
[0079] Хотя выше пояснено содержимое настоящего изобретения согласно примерам, настоящее изобретение не ограничено этим пояснением. Специалистам в данной области техники должно быть очевидным, что могут вноситься различные изменения и модификации.
Список ссылочных обозначений
[0080] 1a, 1b, 1c - устройство прогнозирования курса
10 - схема получения позиции
40 - схема прогнозирования курса
81 - рассматриваемое транспортное средство
82, 82i, 82j - расположенное рядом транспортное средство
83, 83i, 83j, 83M - путь движения
87 - точка разветвления
Di, Dj, DM - поперечная позиция
P1-P5 - позиция расположенного рядом транспортного средства
R - радиус поворота

Заявлена группа изобретений для прогнозирования курса транспортного средства. Предлагается способ, осуществляющийся устройством прогнозирования курса с использованием схемы получения позиции, выполненной с возможностью получать позицию расположенного рядом транспортного средства, и схемы прогнозирования курса, выполненной с возможностью прогнозировать курс рассматриваемого транспортного средства на основе пути движения расположенного рядом транспортного средства, полученного из предыстории позиции расположенного рядом транспортного средства. Курс рассматриваемого транспортного средства прогнозируется посредством увеличения или уменьшения размера пути движения расположенного рядом транспортного средства на основе направления поворота и поперечной позиции расположенного рядом транспортного средства. Обеспечивается прогнозирование курса рассматриваемого транспортного средства из пути движения расположенного рядом транспортного средства. 4 н. и 4 з.п. ф-лы, 11 ил. 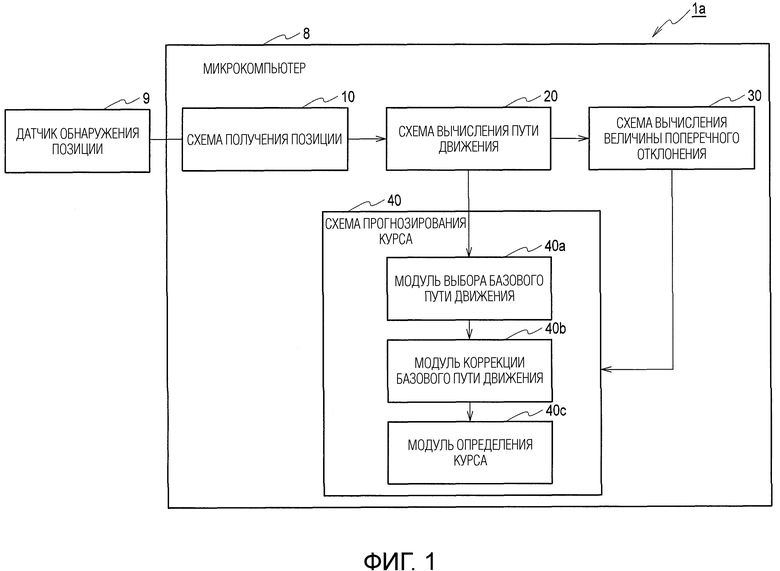
1. Способ прогнозирования курса, задающий путь движения рассматриваемого транспортного средства на основе пути движения расположенного рядом транспортного средства, полученного из предыстории позиции расположенного рядом транспортного средства, посредством использования схемы получения позиции, выполненной с возможностью получать позицию расположенного рядом транспортного средства, при этом способ содержит этапы, на которых:
получают намеченный путь движения рассматриваемого транспортного средства, по меньшей мере, на карте; и
задают путь движения рассматриваемого транспортного средства посредством увеличения или уменьшения размера пути движения расположенного рядом транспортного средства, аналогичного намеченному пути движения, на основе направления поворота и поперечной позиции расположенного рядом транспортного средства.
2. Способ прогнозирования курса, задающий путь движения рассматриваемого транспортного средства на основе пути движения расположенного рядом транспортного средства, полученного из предыстории позиции расположенного рядом транспортного средства, посредством использования схемы получения позиции, выполненной с возможностью получать позицию расположенного рядом транспортного средства, при этом способ содержит этапы, на которых:
задают путь движения рассматриваемого транспортного средства посредством увеличения или уменьшения размера пути движения расположенного рядом транспортного средства на основе направления поворота и поперечной позиции расположенного рядом транспортного средства;
получают картографическую информацию, включающую в себя, по меньшей мере, информацию разветвления дороги; и
прерывают задание пути движения рассматриваемого транспортного средства при определении того, что рассматриваемое транспортное средство должно проезжать точку разветвления.
3. Способ прогнозирования курса по п. 1 или 2, в котором,
чем больше радиус поворота пути движения расположенного рядом транспортного средства, тем меньшей задается степень увеличения или уменьшения.
4. Способ прогнозирования курса по п. 1 или 2, в котором,
чем больше расстояние от рассматриваемого транспортного средства до поперечной позиции расположенного рядом транспортного средства, тем большей задается степень увеличения или уменьшения размера.
5. Способ прогнозирования курса по п. 1 или 2, в котором
путь движения рассматриваемого транспортного средства задается на основе пути движения расположенного рядом транспортного средства, расстояние которого от рассматриваемого транспортного средства является наименьшим.
6. Способ прогнозирования курса по п. 1 или 2, в котором
путь движения рассматриваемого транспортного средства задается на основе пути движения расположенного рядом транспортного средства в полосе движения, смежной с полосой движения, в которой движется рассматриваемое транспортное средство.
7. Устройство прогнозирования курса, содержащее:
схему получения позиции, выполненную с возможностью получать позицию расположенного рядом транспортного средства;
схему прогнозирования курса, выполненную с возможностью задавать путь движения рассматриваемого транспортного средства на основе пути движения расположенного рядом транспортного средства, полученного из предыстории позиции расположенного рядом транспортного средства; и
схему получения намеченного пути, выполненную с возможностью получать намеченный путь движения рассматриваемого транспортного средства, по меньшей мере, на карте, при этом:
схема прогнозирования курса задает путь движения рассматриваемого транспортного средства посредством увеличения или уменьшения размера пути движения расположенного рядом транспортного средства, аналогичного намеченному пути движения, на основе направления поворота и поперечной позиции расположенного рядом транспортного средства.
8. Устройство прогнозирования курса, содержащее:
схему получения позиции, выполненную с возможностью получать позицию расположенного рядом транспортного средства;
схему прогнозирования курса, выполненную с возможностью задавать путь движения рассматриваемого транспортного средства на основе пути движения расположенного рядом транспортного средства, полученного из предыстории позиции расположенного рядом транспортного средства; и
схему получения данных из карты, выполненную с возможностью получать картографическую информацию, включающую в себя, по меньшей мере, информацию разветвления дороги, при этом
схема прогнозирования курса:
задает путь движения рассматриваемого транспортного средства посредством увеличения или уменьшения размера пути движения расположенного рядом транспортного средства на основе направления поворота и поперечной позиции расположенного рядом транспортного средства и
прерывает задание пути движения рассматриваемого транспортного средства при определении того, что рассматриваемое транспортное средство должно проезжать точку разветвления.
| KR 100231285 B1, 01.12.1999 | |||
| JP 4059033 B2, 12.03.2008 | |||
| СПОСОБЫ ПРЕДСКАЗАНИЯ ПУНКТОВ НАЗНАЧЕНИЯ ИЗ ЧАСТИЧНЫХ ТРАЕКТОРИЙ, ПРИМЕНЯЮЩИЕ СПОСОБЫ МОДЕЛИРОВАНИЯ ОТКРЫТОГО И ЗАМКНУТОГО МИРА | 2006 |
|
RU2406158C2 |
| US 8078390 B2, 13.12.2011. | |||

