Изобретение относится к устройствам для загрузки бункеров, воронок или контейнеров сыпучими материалами с распределением поступающих материалов по всей поверхности склада и одновременным измерением уровня насыпи и может использоваться для автоматизации наполнения, например, химических реакторов катализаторами в нефтеперерабатывающей и нефтехимической промышленности.
Из уровня техники известно устройство для осуществления способа контроля параметров сыпучих материалов в резервуарах (RU 2661314 C1, МПК G01F 23/292, G01F 22/00, опубл. 13.07.2018). Устройство выполнено на основе лазер-дальномера, который закреплен на крышке резервуара на поворотном шарнире. При использовании устройства последовательно измеряют кратчайшее расстояние от крышки до линии пересечения поверхности сыпучего материала с боковой стенкой резервуара, после чего поворачивают устройство на заданный угол, меньший или равный углу откоса сыпучего материала, и измеряют расстояние от крышки до поверхности сыпучего материала. Затем, сравнивая полученные расстояния, судят об объеме сыпучего вещества в резервуаре.
Недостатком известного изобретения является то, что обеспечивая возможность контроля объема материала на складе, устройство не содержит узла автоматической загрузки сыпучего материала в резервуар. Кроме того выполнение измерений подразумевает выполнение ручных операций по повороту лазера-дальномера, что снижает технологичность устройства и безопасность его использования при наполнении химических реакторов катализаторами.
Наиболее близким техническим решением к заявленному изобретению и выбранным в качестве прототипа признано устройство для загрузки сыпучего материала (RU 2661519 C2, МПК B65G 65/32, B65G 69/04, опубл. 17.07.2018). Устройство содержит цилиндрическую емкость и расположенное в ее центре гнездо для двигателя, к валу которого присоединена ось вращения, на которой на разном уровне коаксиально закреплены пластины. При этом пластины выполнены в форме сходящихся спиралей, разделенных перегородками на множество секторов, а снаружи емкости на равном расстоянии друг от друга закреплены три вертикальные цилиндрические направляющие, к которым присоединены ножки креплений устройства с возможностью его перемещения по направляющим.
Недостатком технического решения является его низкая технологичность, связанная с отсутствием в его конструкции средств автоматики, позволяющих контролировать работу двигателя и, тем самым, управлять скоростью наполнения резервуара сыпучим материалом. Кроме того устройство не позволяет осуществлять автоматический контроль уровня сыпучего материала в резервуаре.
Технической задачей, на решение которой направлено заявленное изобретение, является обеспечение наполнение резервуаров сыпучими материалами с распределением поступающих материалов по всей поверхности склада с возможностью автоматического измерения и контроля высоты насыпи.
Указанная задача решена тем, что устройство для загрузки сыпучего материала содержит цилиндрический корпус, в центре которого установлена ось с закрепленным на ее конце диском для разбрасывания сыпучего материала, при этом ось соединена с валом электродвигателя. На оси взаимно перпендикулярно закреплены первый и второй ворошители, а на корпусе закреплены дальномер и блок управления устройством, снабженный модулем беспроводной связи, измерительным входом и силовым выходом, при этом выход дальномера подключен к измерительному входу, а силовой выход подключен к электродвигателю.
Положительным техническим результатом, обеспечиваемым раскрытой выше совокупностью признаков устройства, является повышение эффективности наполнения резервуаров сыпучими материалами, за счет перемешивания засыпаемого материала с помощью ворошителей, возможности управления скоростью наполнения резервуара и автоматического контроля уровня сыпучего материала за счет применения в конструкции устройства электродвигателя и дальномера, подключенных к блоку управления устройством.
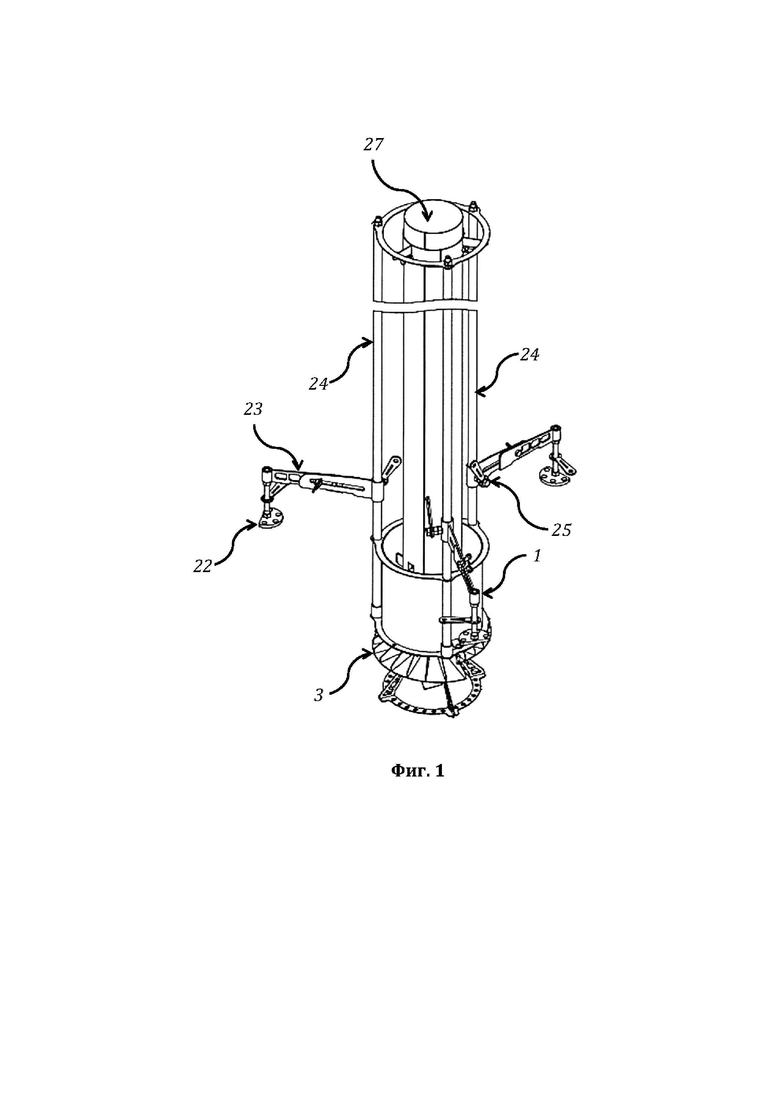
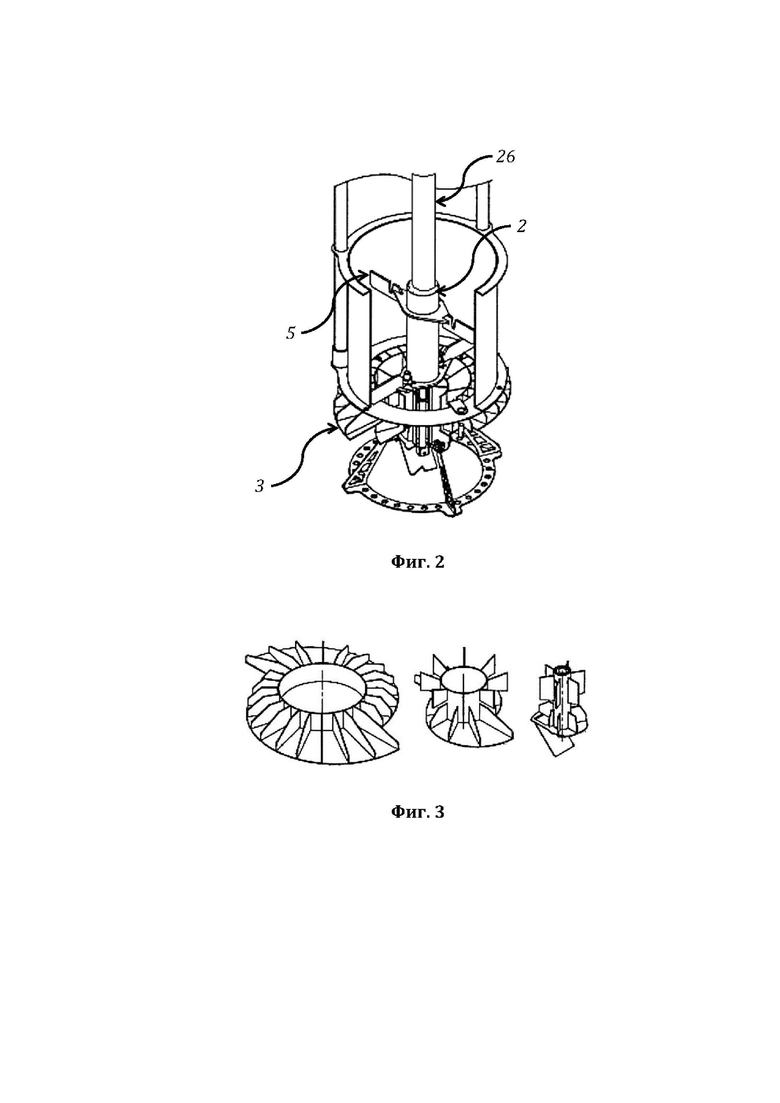
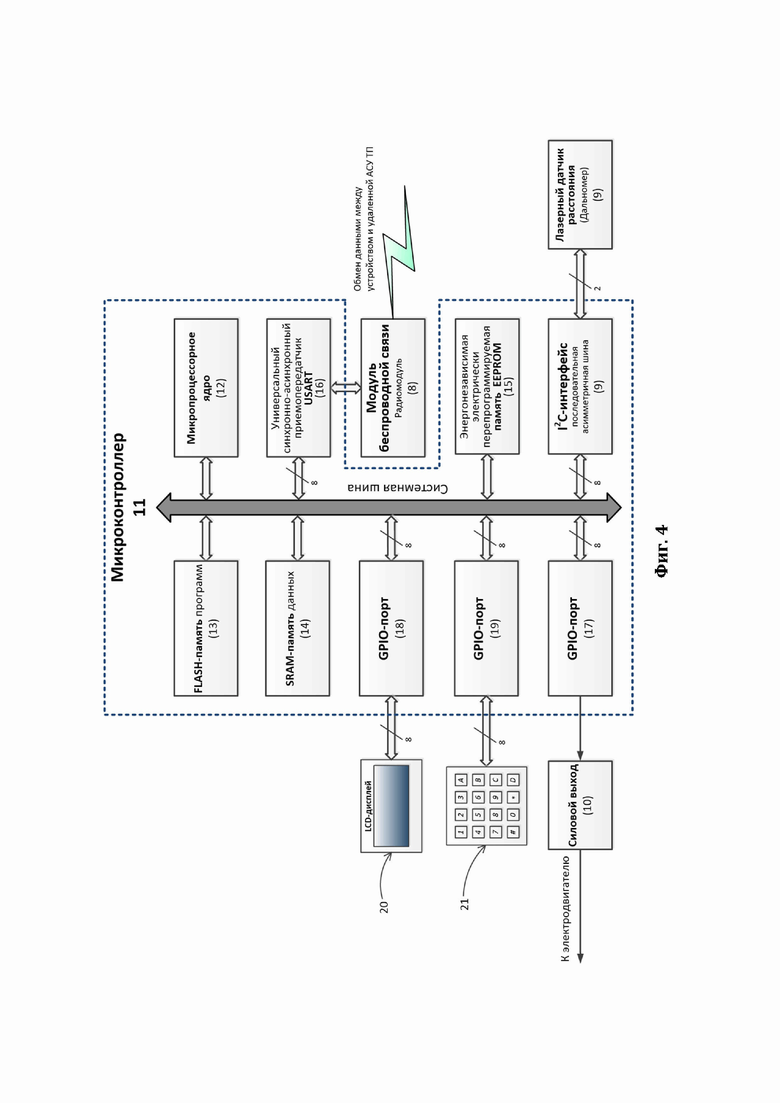
Изобретение поясняется чертежами, где на фиг. 1 представлен внешний вид устройства в изометрической проекции; на фиг 2. Представлен внешний вид цилиндрического корпуса; на фиг. 3 представлен внешний вид спиралевидных пластин диска для разбрасывания сыпучего материала; на фиг. 4 представлена структурная схема блока управления устройством.
Устройство для загрузки сыпучего материала устроено следующим образом.
Его основой является цилиндрический корпус 1, в центре которого расположена ось 2 с закрепленным на ее конце диском 3 для разбрасывания сыпучего материала, при этом ось 2 соединена с валом электродвигателя. На оси взаимно перпендикулярно закреплены первый и второй ворошители 5, а на корпусе 1 закреплены дальномер 7 и блок управления устройством, снабженный, модулем беспроводной связи 8, измерительным входом 9 и силовым выходом 10. При этом выход дальномера 7 подключен к измерительному входу 9, а силовой выход 10 подключен к электродвигателю.
Диск для разбрасывания сыпучего материала выполнен в виде трех спиралевидных пластин с центральными отверстиями различного диаметра, снабженных вертикальными ребрами, при этом диски установлены друг над другом коаксиально, начиная от диска меньшего диаметра к большему диаметру (фиг. 3), на оси 2 соединением с натягом. Ось 2 соединена с валом электродвигателя гибким валом, при этом электродвигатель может быть выполнен асинхронным или шаговым, а первый и второй ворошители 5 представляют собой лопатки, зафиксированные в проушинах муфт, закрепленных на оси 2.
Блок управления может быть закреплен в герметичном кожухе (на фигурах условно не показан) на корпусе 1 устройства и выполнен на основе микроконтроллера 11, в качестве которого может быть использована микросхема STM8L1521 (1 STM8 8-bit MCUs // St.com URL: http://www.st.com/en/microcontrollers/stm8-8-bit-mcus.html?querycriteria= productId=SC1244 (дата обращения: 09.02.2022).), содержащего микропроцессорное ядро 12, соединенное с помощью системной шины с FLASH-памятью программ 13, SRAM-памятью данных 14, энергонезависимой электрически перепрограммируемой памятью EEPROM 15, измерительному входу 9, реализованному с помощью последовательной асимметричной шины для подключения низкоскоростных периферийных компонентов, представляющей собой I2C-интерфейс, универсальным синхронно-асинхронным приемопередатчиком USART 16 и интерфейсом ввода-вывода общего назначения, сгруппированного в три GPIO-порта ввода-вывода 17, 18, 19. При этом к I2C-интерфейсу (последовательной асимметричной шине) 9 подключен дальномер 7, выполненный в виде лазерного датчика расстояния VL53L0X2 (2 Датчик расстояния лазерный VL53L0X // MCU Store. URL: https://mcustore.ru/store/datchiki-i-sensory/datchik-rasstoyaniya-lazernyj-vl53l0x-gy-530/?gclid=Cj0KCQiA89zvBRDoARIsAOIePbAKYLBUlgB sySS-4FmwgHK5KG8k2w9CO0-86m76K25SK7HJMBKzRFgaAoVHEALw_wcB (дата обращения: 09.02.2022).), к универсальному синхронно-асинхронному приемопередатчику USART 16 подключен модуль беспроводной связи 8, выполненный в виде радиомодуля в качестве которого может использоваться микросхема HC-12 с UART-интерфейсом3 (3 HC-12: радиомодуль c UART-интерфейсом на 433 МГц // Записки программиста. URL: https://eax.me/hc-12 (дата обращения: 09.02.2022).), к первому GPIO-порту ввода-вывода 17 подключен силовой выход 10, представляющий собой шестиканальную сборку на основе ключей Дарлингтона, в качестве которой может использоваться микросхема ULN20034 (4 Микросхема ULN2003. Описание, схема подключения // Joyta.ru. Все для радиолюбителя. URL: https://www.joyta.ru/4575-mikrosxema-uln2003-opisanie-i-sxemy-primeneniya/ (дата обращения: 09.02.2022).), ко второму GPIO-порту ввода-вывода 18 подключен символьный LCD-дисплей 20 на основе контроллера HD447805 (5 HD44780 // All-Audio.pro. Статьи, схемы, справочники. URL: https://all-audio.pro/c14/instruktsii/ hd44780.php#simvol-nyy-lcd-displey-16x2-hd44780 (дата обращения: 09.02.2022).), а к третьему GPIO-порту ввода-вывода 19 подключена клавиатура 21, содержащая шестнадцать клавиш.
Устройство для загрузки сыпучего материала работает следующим образом.
Первоначально устройство закрепляют на крышке (на фигурах условно не показана) резервуара с помощью фланцев 22 креплений 23, установленных подвижно на трех вертикальных направляющих 24, закрепленных на верхнем торце корпуса 1. После регулировки высоты положения устройства над горловиной резервуара его жестко фиксируют на направляющих 24 с помощью зажимов 25, соединяют ось 2 посредством гибкого вала 26 с валом электродвигателя и закрепляют на верхнем торце корпуса 1 тканевый рукав 27 для подачи сыпучего материала. Затем активируют блок управления и с помощью модуля беспроводной связи 8 устанавливают связь по беспроводному каналу между блоком управления и удаленной автоматизированной системой управления технологическим процессом (АСУ ТП) наполнения резервуара сыпучим материалом. После выполнения указанных действий устройство готово к работе. Для начала технологического процесса наполнения резервуара в тканевый рукав 27 подают сыпучий материал и активируют блок управления.
После активации блока управления устройства микропроцессорное ядро 12, микроконтроллера 11 выполняя управляющую программу, хранящуюся во FLASH-памяти программ 13, буферизируя данные с помощью SRAM-памяти данных 14, регулирует скорость вращения вала электродвигателя с помощью силового выхода 10 через GPIO-порт 17. При этом в случае использования асинхронного электродвигателя, GPIO-порт 17 работает в режиме аппаратно-программного ШИМ-модулятора, реализуя частотный метод управления, а в случае применения шагового электродвигателя GPIO-порт 17 управляет его обмотками на основе алгоритма «бегущая единица».
Вал электродвигателя через гибкий вал 26 передает вращающий момент на ось 2 и закрепленному на ее конце диску 3, при этом сыпучий материал попадает на все три пластины диска 3, которые за счет вращения придают каждой точке внешней спиралевидной поверхности пластин свою угловую скорость. Последнее обеспечивает рассыпание материала по каждому из секторов, образуемых ребрами пластин, на определенную длину, чем достигается равномерная укладка сыпучего материала.
Во все время осуществления процесса наполнения резервуара микропроцессорное ядро 12 микроконтроллера 11 осуществляет итерационный опрос дальномера 7 посредством линий SCL и SDA I2C-интерфейса, фиксируя высоту насыпи внутри резервуара и передавая полученные значения удаленной автоматизированной системе управления технологическим процессом посредством универсального синхронно-асинхронного приемопередатчика UASRT 16 посредством модуля беспроводной связи 8. При достижении уровня насыпи заданной высоты удаленная АСУ ТП передает устройству по беспроводному каналу команду на остановку устройства, после чего останавливается подача сыпучего материала в рукав 26, а микроконтроллер 11 блока управления отключает электродвигатель.
Все уставки, являющиеся параметрами регулирования скорости вращения электродвигателя, а также относящиеся к частоте опроса дальномера 7 могут храниться, как в энергонезависимой электрически перепрограммируемой памяти EEPROM 15, так и передаваться удаленной АСУ ТП устройству по беспроводному каналу связи.
Настройки уставок, а также контроль за работой устройства могут осуществляться оператором с помощью клавиатуры 21, подключенной к GPIO-порту 19, при этом для выбора функций и режимов работы устройства используются символьные клавиши, а для ввода числовых параметров - цифровые. Контроль за правильностью ввода параметров и выбором требуемых режимов устройства осуществляется с помощью LCD-дисплея 20, подключенного к GPIO-порту 18.
Таким образом, рассмотренное в нестоящей заявке устройство, является высокотехнологичным рассеивателем сыпучего материала, которое может быть использовано для загрузки резервуаров различного назначения, например заполнения химических реакторов гранулами катализаторов, в ручном или автоматизированном режимах с возможностью автоматического контроля высоты насыпи материала.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПРОБКОВЫЙ КРАН С БЛОКОМ ТЕЛЕМЕТРИИ | 2022 |
|
RU2793261C1 |
| Способ изготовления криогенного сосуда | 2024 |
|
RU2839222C1 |
| Тепловая пушка для поддержания заданной температуры в помещении | 2022 |
|
RU2819978C2 |
| Способ производства колеровочной пасты | 2021 |
|
RU2782020C1 |
| СПОСОБ ПЕРЕГРУЗКИ КАТАЛИЗАТОРА ИЗОМЕРИЗАЦИИ В ИНЕРТНОЙ СРЕДЕ | 2024 |
|
RU2829383C1 |
| Дезинтегратор гипсокартона для получения сырья для производства лакокраски | 2023 |
|
RU2805591C1 |
| Беспилотная летательная платформа вертолётного типа с пневмомеханическим устройством для тушения пожаров | 2023 |
|
RU2814718C1 |
| ЛАБОРАТОРНАЯ УСТАНОВКА ДЛЯ ДИСПЕРГИРОВАНИЯ ТЕКУЧИХ ЭМУЛЬСИЙ И СУСПЕНЗИЙ | 2018 |
|
RU2681624C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ УГЛОВ | 2021 |
|
RU2768504C1 |
| Система удаленного доступа в квартиру | 2023 |
|
RU2823662C1 |
Изобретение относится к устройствам для загрузки бункеров сыпучими материалами. Устройство для загрузки сыпучего материала содержит цилиндрический корпус, ось, электродвигатель, ворошители, дальномер и блок управления. В центре корпуса установлена ось с закрепленным на ее конце диском для разбрасывания сыпучего материала. Ось соединена с валом электродвигателя. На оси взаимно перпендикулярно закреплены первый и второй ворошители. На корпусе закреплены дальномер и блок управления устройством. Блок управления снабжен модулем беспроводной связи, измерительным входом и силовым выходом. Выход дальномера подключен к измерительному входу, а силовой выход подключен к электродвигателю. Достигается повышение эффективности наполнения резервуаров сыпучими материалами. 7 з.п. ф-лы, 4 ил.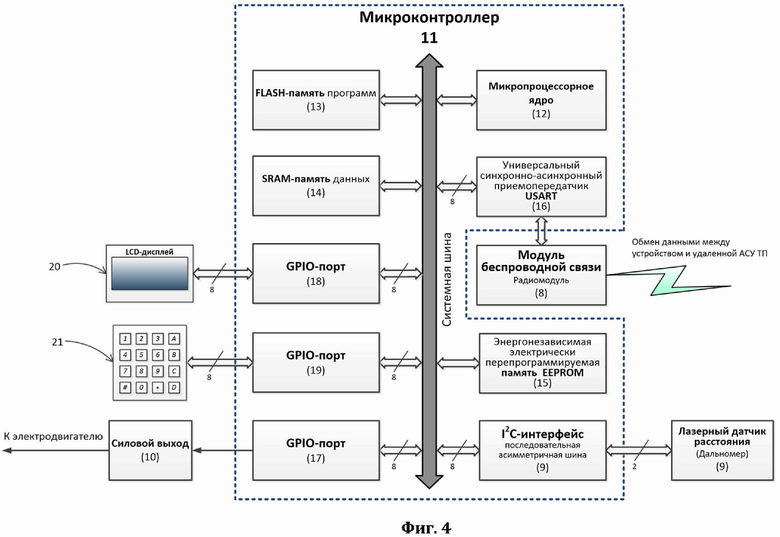
1. Устройство для загрузки сыпучего материала, содержащее цилиндрический корпус, в центре которого установлена ось с закрепленным на ее конце диском для разбрасывания сыпучего материала, при этом ось соединена с валом электродвигателя, отличающееся тем, что на оси взаимно перпендикулярно закреплены первый и второй ворошители, а на корпусе закреплены дальномер и блок управления устройством, снабженный модулем беспроводной связи, измерительным входом и силовым выходом, при этом выход дальномера подключен к измерительному входу, а силовой выход подключен к электродвигателю.
2. Устройство по п.1, отличающееся тем, что диск для разбрасывания сыпучего материала выполнен в виде трех спиралевидных пластин с центральными отверстиями различного диаметра, снабженных вертикальными ребрами, при этом диски установлены друг над другом коаксиально, начиная от диска меньшего диаметра к большему диаметру, на оси соединением с натягом.
3. Устройство по п.1, отличающееся тем, что ось соединена с валом электродвигателя гибким валом, а первый и второй ворошители представляют собой лопатки, зафиксированные в проушинах муфт, закрепленных на оси.
4. Устройство по п.1, отличающееся тем, что блок управления выполнен на основе микроконтроллера, содержащего микропроцессорное ядро, соединенное с помощью системной шины с FLASH-памятью программ, SRAM-памятью данных, энергонезависимой электрически перепрограммируемой памятью EEPROM, снабжен измерительным входом с подключенным к нему дальномером, реализованным с помощью последовательной асимметричной шины для подключения низкоскоростных периферийных компонентов, представляющей собой I2C-интерфейс, универсальным синхронно-асинхронным приемопередатчиком USART, к которому подключен модуль беспроводной связи, и интерфейсом ввода-вывода общего назначения, сгруппированного в три GPIO-порта ввода-вывода.
5. Устройство по п.4, отличающееся тем, что дальномер выполнен в виде лазерного датчика расстояния.
6. Устройство по п.4, отличающееся тем, что модуль беспроводной связи выполнен в виде радиомодуля.
7. Устройство по п.4, отличающееся тем, что к первому GPIO-порту ввода-вывода подключен силовой выход, ко второму GPIO-порту ввода-вывода подключен символьный LCD-дисплей, а к третьему GPIO-порту ввода-вывода подключена клавиатура, содержащая шестнадцать клавиш.
8. Устройство по п.7, отличающееся тем, что силовой выход представляет собой шестиканальную сборку на основе ключей Дарлингтона.
| УСТРОЙСТВО ДЛЯ ЗАГРУЗКИ СЫПУЧЕГО МАТЕРИАЛА (ВАРИАНТЫ) | 2016 |
|
RU2661519C2 |
| ПОВЕРХНОСТНО-ГЛУБИННЫЙ НЕЙТРОННЫЙ ВЛАГОМЕР | 0 |
|
SU165927A1 |
| УСТРОЙСТВО для УКЛАДКИ в ШТАБЕЛЬ ЯЩИКОВ НА ПРЯМОУГОЛЬНЫЕ ПОДДОНЫ С ПЕРЕВЯЗКОЙ СЛОЕВ | 0 |
|
SU185760A1 |
| 0 |
|
SU182323A1 | |
| Паста для полирования и шлифования мелких металлических деталей | 1976 |
|
SU594155A1 |
| WO 9012746 A1, 01.11.1990 | |||
| Круглая пила для резания древесины | 1979 |
|
SU1009272A3 |

