Изобретение относится к приспособлениям, помогающим ходить пациентам или людям с ограниченными возможностями в движении, опираясь на костыли или трость.
Известен способ повышения комфортности ходьбы пациента (US 2013/0199586 A1 и EP 0541935 A2) путем изменения длины костылей или трости за счет двигателей, размещенных внутри костылей или трости и приводимых в движение пациентом.
Недостатком известного способа, принятого за аналог, является то, что в процессе ходьбы пациент должен постоянно следить за уровнем поверхности, по которой он передвигается, что снижает уровень комфортности пациента при движении по наклонной поверхности, или же по лестнице.
Известен способ управления освещением поверхности впереди идущего с тростью пациента (US 2014/0192516 A1) за счет автоматического изменения яркости встроенного в трость источника света в зависимости от освещенности поверхности, по которой передвигается пациент.
Недостатком известного способа является то, что пациенту необходимо следить за поверхностью, по которой он передвигается, что снижает уровень комфортности пациента при ходьбе.
Технический результат - повышение уровня комфортности пациента при ходьбе с костылями или тростью.
Технический результат достигается тем, что костыли или трость автоматически реагируют на изменение расстояния от ручки до участка поверхности, на который будут опираться костыли или трость при следующем шаге пациента, определяемое бесконтактным способом. Длина костылей или трости изменяется в зависимости от измеренного расстояния, причем это изменение осуществляется за время переноса костылей или трости в следующее положение. Кроме того, длина костылей или трости может автоматически изменяться в зависимости от угла отклонения виртуальной линии, соединяющей ручку костыля или трости с маячком, расположенным на поясе пациента, от горизонтальной плоскости.
Ходьба пациента с костылями или тростью рассматривается как постоянная смена положения костылей или трости от предыдущего положения к следующему. Во время предыдущего положения костылей или трости измеряется бесконтактным способом расстояние от ручки до участка поверхности, куда костыли или трость будут установлены в следующем положении. По результату измерения длина костылей или трости экстраполируется для следующего положения и, за время переноса костылей или трости в следующее положение, их длина устанавливается автоматически. По п.2 формулы изобретения, в момент постановки костылей или трости в следующее положение измеряется угол отклонения виртуальной линии, соединяющей ручку костыля или трости с маячком, расположенном на поясе пользователя, от горизонтальной плоскости. По результату измерения длина костылей или трости автоматически изменяется пропорционально измеренному углу.
Совокупность автоматического реагирования длины костылей или трости на расстояние от ручки до участка поверхности при следующем их положении путем экстраполяции этого расстояния и изменения длины костылей или трости, а также автоматическое реагирование на угол отклонения виртуальной линии, соединяющей ручку с маячком, расположенном на поясе пациента от горизонтальной плоскости обнаруживают новые свойства предложенного способа:
- пациент избавлен от необходимости следить за уровнем поверхности впереди себя;
- пациенту не нужно манипулировать длиной костылей или трости, поскольку это выполняется автоматически.
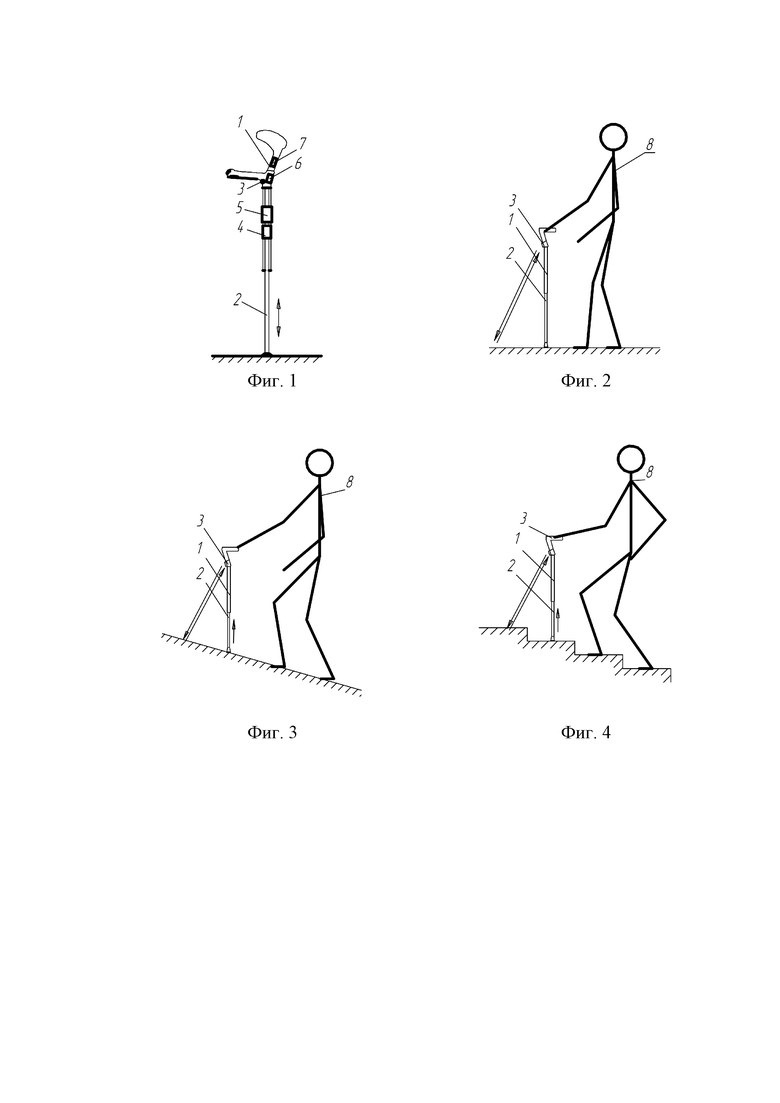
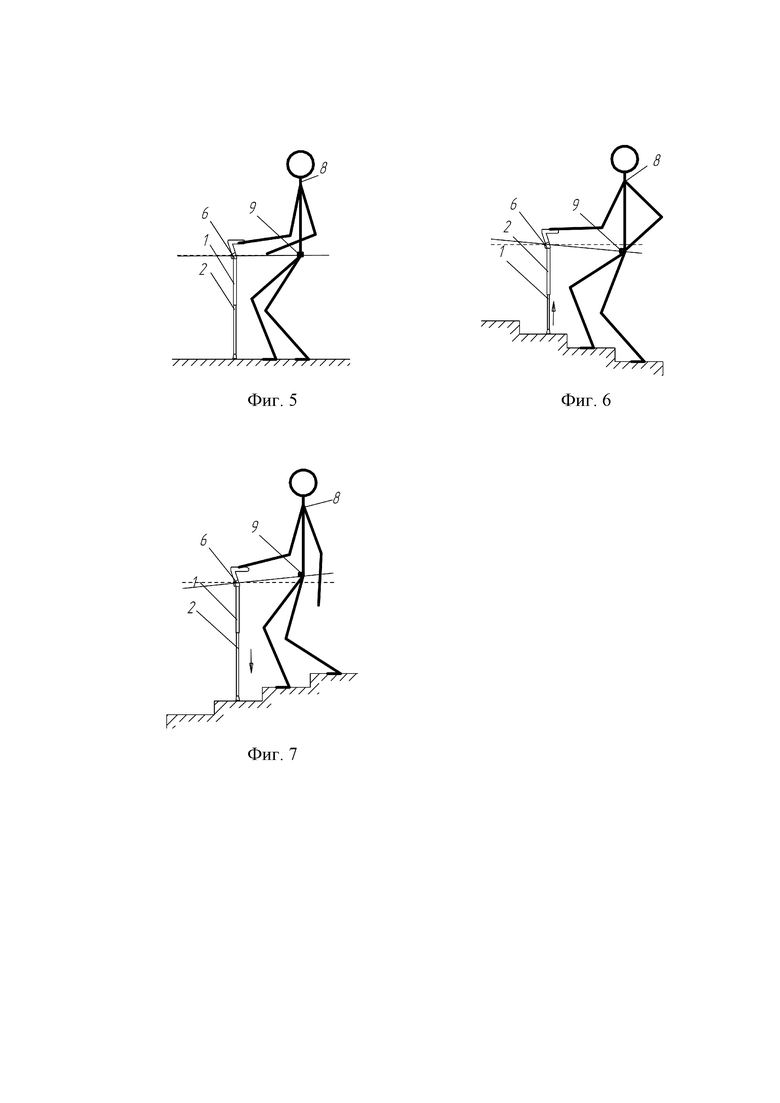
На фиг.1 показана конструкция трости, реализующая предложенный способ. На рисунках показаны различные ситуации при ходьбе пациента с измерением расстояния от ручки до участка поверхности: по горизонтальной поверхности (фиг.2), по наклонной (фиг.3), по лестнице (фиг.4), а также при ходьбе пациента с измерением угла отклонения виртуальной линии, соединяющей ручку с маячком, расположенном на поясе пациента от горизонтальной плоскости: при ходьбе по прямой поверхности (фиг.5), при ходьбе по лестнице вверх (фиг.6), при ходьбе по лестнице вниз (фиг.7).
Способ управления реализуется тростью 1, которая содержит выдвижную часть 2 и измеритель расстояния 3. Выдвижная часть 2 кинематически через передачу винт-гайка 4 связана с электроприводом 5, управляемым от блока системы управления 6, размещенном в ручке трости, и аккумуляторной батареи 7. Измеритель расстояния 3 предназначен для определения расстояния от ручки до участка поверхности, куда будет поставлена трость при следующем шаге пациента 8. По п.2 формулы изобретения на поясе пациента размещен маячок 9, связанный с блоком управления 6 бесконтактной линией связи, служащей для измерения угла отклонения виртуальной линии, соединяющей ручку трости 1 с маячком 9, от горизонтальной плоскости.
Способ реализуется следующим образом. При движении пациента 8 по горизонтальной, наклонной поверхности или по лестнице, как показано на фиг. 2 – 4, измеритель расстояния 3 определяет бесконтактным способом расстояние от ручки до поверхности в том месте, куда предположительно будут поставлена трость при следующем шаге пациента 8. После измерения, блок системы управления 6, принимая во внимание текущую длину трости 1, экстраполирует длину трости 1 для следующего шага пациента 8. Далее, за время переноса трости 1 в следующее положение, блок системы управления 6 с аккумуляторной батареей 7 активируют электропривод 5 и, через кинематическую передачу винт-гайка 4, устанавливают выдвижную часть 2 в положение, при котором длина трости 1 будет соответствовать значению, которое она должна принимать при следующем шаге пациента. По п.2 формулы изобретения внешним воздействием, в зависимости от которого изменяется длина трости 1, является угол отклонения виртуальной линии, соединяющей ручку трости 1 с маячком 9 от горизонтальной плоскости в момент установки трости 1 в следующее положение (см. фиг.5). Если угол имеет положительное значение, то длина трости 1 уменьшается (см. фиг. 6), а если угол отрицателен, то длина увеличивается (см. фиг.7), причем, изменение длины трости 1 пропорционально величине угла отклонения.
Поставленная техническая задача решается путем повышения уровня комфортности пациента при ходьбе с костылем или тростью, за счет того, что позволит освободить внимание пациента от необходимости следить за каждым своим шагом при передвижении по практически любой приемлемой для него поверхности, делает его положение более устойчивым и избавляет от манипуляций длиной костылей или трости.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПАРА КОСТЫЛЕЙ ДЛЯ ЭКЗОСКЕЛЕТА | 2019 |
|
RU2770786C2 |
| УЧЕБНО-ТРЕНИРОВОЧНЫЙ КОМПЛЕКС И СПОСОБ ОБУЧЕНИЯ МАНЕВРЕННОСТИ НА ПРОТЕЗЕ | 2023 |
|
RU2821646C1 |
| Способ реабилитации пациентов после эндопротезирования тазобедренного сустава | 2019 |
|
RU2725245C1 |
| СПОСОБ ЛЕЧЕНИЯ ЗАБОЛЕВАНИЙ И ПОСЛЕДСТВИЙ ПОВРЕЖДЕНИЙ ОПОРНО-ДВИГАТЕЛЬНОГО АППАРАТА | 1993 |
|
RU2098149C1 |
| СПОСОБ КОМПЛЕКСНОЙ ОЦЕНКИ РЕЗУЛЬТАТОВ РЕАБИЛИТАЦИОННЫХ МЕРОПРИЯТИЙ У ПАЦИЕНТОВ С АМПУТАЦИОННЫМИ КУЛЬТЯМИ БЕДРА ПОСЛЕ ПРОТЕЗИРОВАНИЯ | 2014 |
|
RU2558463C1 |
| СПОСОБ ФИЗИЧЕСКОЙ РЕАБИЛИТАЦИИ ПАЦИЕНТОВ С АМПУТАЦИЯМИ НИЖНИХ КОНЕЧНОСТЕЙ | 2023 |
|
RU2834772C1 |
| НЕИНВАЗИВНАЯ ЭЛЕКТРОДНАЯ МАТРИЦА СПИНАЛЬНОГО НЕЙРОПРОТЕЗА И СПОСОБ ЕЕ ПРИМЕНЕНИЯ | 2021 |
|
RU2778009C1 |
| СПОСОБ РЕАБИЛИТАЦИИ ПАЦИЕНТА С НАРУШЕНИЕМ ПОСТУРАЛЬНОГО БАЛАНСА | 2016 |
|
RU2626912C1 |
| СПОСОБ ВОССТАНОВИТЕЛЬНОГО ЛЕЧЕНИЯ БОЛЬНЫХ ПРИ ПЕРЕЛОМАХ КОСТЕЙ ТАЗА ПОСЛЕ ОПЕРАТИВНОГО ВМЕШАТЕЛЬСТВА | 1998 |
|
RU2147857C1 |
| СПОСОБ ВЫБОРА РЕЖИМА ПОСЛЕОПЕРАЦИОННОЙ РЕАБИЛИТАЦИИ ПОСЛЕ РЕЭНДОПРОТЕЗИРОВАНИЯ ТАЗОБЕДРЕННОГО СУСТАВА У ПАЦИЕНТОВ С ОБШИРНЫМИ КОСТНЫМИ ДЕФЕКТАМИ В ОБЛАСТИ ВЕРТЛУЖНОЙ ВПАДИНЫ | 2020 |
|
RU2753648C1 |
Изобретение относится к медицине. Способ управления костылями или тростью, заключающийся в том, что костыли или трость автоматически реагируют на изменение расстояния от ручки костыля или трости до участка поверхности, на который костыли или трость будут опираться при следующем положении, определяемое бесконтактным способом при помощи дальномера во время предыдущего положения. Реакцией на изменение расстояния является изменение длины костылей или трости за время переноса из предыдущего в следующее положение. Применение изобретения позволит помогать ходить пациентам или людям с ограниченными возможностями в движении, опираясь на костыли или трость. 1 з.п. ф-лы, 7 ил.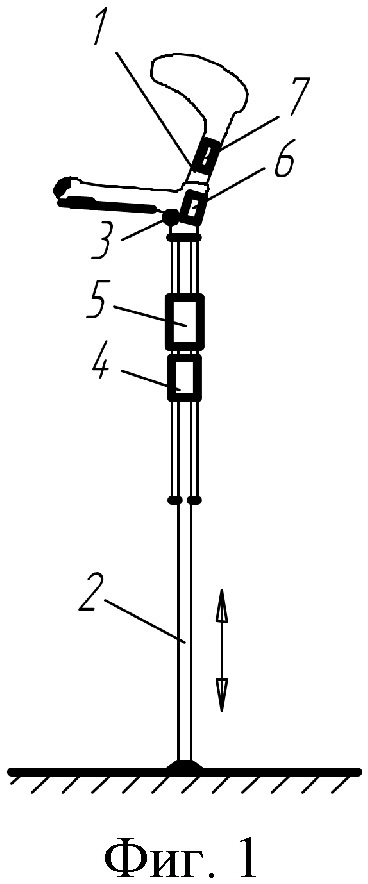
1. Способ управления костылями или тростью, заключающийся в том, что костыли или трость автоматически реагируют на изменение расстояния от ручки костыля или трости до участка поверхности, на который костыли или трость будут опираться при следующем положении, определяемое бесконтактным способом при помощи дальномера во время предыдущего положения, а реакцией на изменение расстояния является изменение длины костылей или трости за время переноса из предыдущего в следующее положение.
2. Способ по п.1, отличающийся тем, что изменение длины костылей или трости происходит пропорционально углу отклонения виртуальной линии, соединяющей ручку костыля или трости с маячком, расположенным на поясе пользователя, от горизонтальной плоскости.
| ШИРОКОПОЛОСНЫЙ ИНТЕГРАТОР ПЕРЕМЕННОГО ТОКА | 0 |
|
SU167681A1 |
| US 2013199586 A1, 08.08.2013 | |||
| CN 203694023 U, 09.07.2014. | |||

