Изобретение относится к приспособлениям, помогающим ходить пользователям в экзоскелете или людям с ограниченными возможностями в движении, опираясь на костыли.
Известен способ повышения комфортности ходьбы пользователя (US 2013/0199586 А1 и ЕР 0541935 А2) путем изменения длины костылей за счет двигателей, размещенных внутри костылей и приводимых в движение пользователем.
Недостатком известного способа, принятого за аналог, является то, что в процессе ходьбы в экзоскелете пользователь должен постоянно следить за уровнем поверхности, по которой он передвигается, что снижает уровень его безопасности при движении по наклонной поверхности, или же по лестнице, поскольку во фронтальной плоскости он минимален, а пользователь устанавливает костыли по ширине интуитивно.
Известно автоматическое реагирование костылей на изменение расстояния от ручки костыля до участка поверхности, на который костыли будут опираться при следующем положении (заявка №2018108204/14(012690), от 07.03.2018).
Недостатком упомянутого способа является то, что в наиболее вероятной для падения пользователя фронтальной плоскости, его безопасность за счет последнего способа обеспечена недостаточно.
Техническим результатом, на достижение которого направлено предлагаемое изобретение, является дальнейшее повышение безопасности пациента при ходьбе в экзоскелете с дополнительной опорой на предложенную пару костылей.
Технический результат достигается за счет того, что оба костыля работают совместно и автоматически, поддерживая горизонтальность виртуальной линии, соединяющей ручки костылей во фронтальной плоскости движения пользователя причем каждый из костылей снабжен измерителем расстояния, являющимся при этом одновременно светолучевым или лазерным указателем, причем указанный измеритель расстояния выполнен с возможностью определять бесконтактным способом расстояние от ручки костыля до точки постановки костылей на поверхности на следующем шаге, на которую он указывает. Точки поверхности при этом определяются исходя из обеспечения максимальной устойчивости пользователя во фронтальной плоскости.
Предложенная новая совокупность существенных признаков, состоящая из пары костылей с автоматически изменяющейся длиной, дополненная системой, поддерживающей горизонтальность виртуальной линии, соединяющей ручки костылей во фронтальной плоскости движения пользователя, причем, каждый из костылей снабжен измерителем расстояния, являющимся при этом одновременно светолучевым и лазерным указателем точки поверхности, куда соответствующий костыль должен быть перенесен при следующем шаге, на которую он указывает, обнаруживает новые свойства:
- безопасность пользователя в наиболее вероятной для его падения фронтальной плоскости перестает быть минимальной;
- указание точек постановки костылей при следующем шаге экзоскелета, рассчитанное, исходя из максимальной устойчивости пользователя, повышает безопасность пользователя и его уверенность в правильности постановки костылей для следующего шага;
- обнаружение неровностей поверхности на пути пользователя позволяет скорректировать параметры шагов экзоскелета, повышая тем самым устойчивость пользователя и его безопасность.
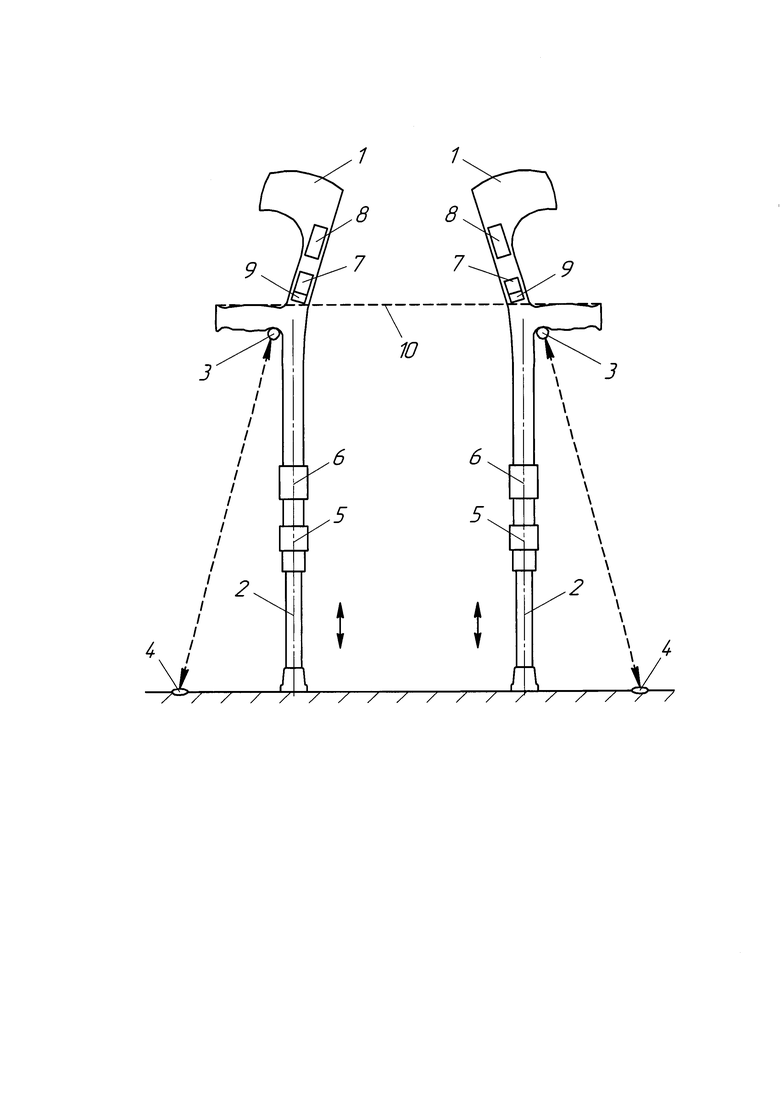
На рисунке приведена предложенная пара костылей для экзоскелета.
Корпус 1 каждого из костылей содержит выдвижную часть 2 и измеритель расстояния 3, являющийся одновременно светолучевым или лазерным указателем точек 4 постановки костылей на поверхности при следующем шаге пользователя, причем указанный измеритель расстояния выполнен с возможностью определять бесконтактным способом расстояние от ручки костыля до точки постановки костылей на поверхности на следующем шаге, на которую он указывает. Выдвижная часть 2 кинематически через передачу винт - гайка 5 связана с электроприводом 6, управляемым от блока системы управления 7, размещенной в ручках костылей, где размещены также и аккумуляторные батареи электропитания 8. Измеритель расстояния 3 в режиме измерения предназначен для определения расстояния от ручки до точки 4 постановки костыля на поверхности при следующем шаге пользователя. В состав каждой части системы управления 7, размещенной в отдельном костыле, входит датчик 9 отклонения костыля от виртуальной горизонтальной плоскости 10. Система управления 7 по беспроводному каналу связи соединена с контроллером управления экзоскелетом для передачи информации об изменении рельефа поверхности и для изменения параметров следующих шагов экзоскелета (длина шага, высота подъема голеностопа и др.).
Предложенное устройство работает следующим образом. При движении пользователя в экзоскелете по любой приемлемой поверхности, измеритель расстояния 3 определяет бесконтактным способом расстояние от ручки костыля до точки 4 постановки костылей на поверхности при следующем шаге пользователя. После измерения, блок системы управления 7, принимая во внимание текущую длину трости, экстраполирует длину трости 1 для следующего шага пользователя. Далее, за время переноса трости 1 в следующее положение, блок системы управления 7 с аккумуляторной батареей 8 активируют электропривод 6 и, через кинематическую передачу винт-гайка 5, устанавливают выдвижную часть 2 в положение, при котором длина трости будет соответствовать значению, которое она должна принимать при следующем шаге пользователя.
В состав каждого из пары костылей, конкретно в состав системы управления 7 входят датчики 9 отклонения костыля от виртуальной горизонтальной плоскости 10. При ходьбе по неровной или наклонной поверхности, а конкретно при несовпадении положения любого из датчиков 9 с виртуальной горизонталью 10, система управления 7 вырабатывает управляющий сигнал, активирующий электропривод 6 и, через кинематическую передачу винт-гайка 5, устанавливают выдвижную часть 2 в положение, при котором датчики 9 вновь совпадут с виртуальной горизонталью 10, ручки костылей займут горизонтальное положение, а значит положение пользователя будет наиболее устойчивым и безопасным. В случае, если на пути пользователя встречается неровность, обнаруженная системой управления 7, последняя по беспроводному каналу связи передает информацию контроллеру управления экзоскелетом для того, чтобы изменить параметры следующего шага экзоскелета с целью обеспечения безопасности пользователя.
Технический результат достигается путем повышения уровня безопасности пользователя при ходьбе с костылями в экзоскелете, за счет того, что позволит освободить его внимание от необходимости следить за каждым своим шагом при передвижении по практически любой приемлемой для него поверхности, делает его положение более устойчивым и избавляет от манипуляций длиной костылей.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ УПРАВЛЕНИЯ КОСТЫЛЯМИ ИЛИ ТРОСТЬЮ | 2018 |
|
RU2690899C1 |
| АППАРАТ ПОМОЩИ ПРИ ХОДЬБЕ С СИСТЕМОЙ ОПРЕДЕЛЕНИЯ ЖЕЛАТЕЛЬНЫХ ПАРАМЕТРОВ ШАГА В СРЕДЕ С ПРЕПЯТСТВИЯМИ | 2016 |
|
RU2636419C1 |
| СПОСОБ ЗАДАНИЯ ЖЕЛАЕМЫХ ТРАЕКТОРИЙ ДВИЖЕНИЯ ЭКЗОСКЕЛЕТА ДЛЯ ПЕРЕДВИЖЕНИЯ ПОЛЬЗОВАТЕЛЯ С НАРУШЕНИЕМ ФУНКЦИЙ ОПОРНО-ДВИГАТЕЛЬНОГО АППАРАТА, УСТРОЙСТВО СОДЕЙСТВИЯ ХОДЬБЕ ЭТОГО ПОЛЬЗОВАТЕЛЯ И СПОСОБ УПРАВЛЕНИЯ ЭТИМ УСТРОЙСТВОМ | 2015 |
|
RU2598124C1 |
| АППАРАТ ПОМОЩИ ПРИ ХОДЬБЕ ПОЛЬЗОВАТЕЛЮ С НАРУШЕНИЕМ ОПОРНО-ДВИГАТЕЛЬНЫХ ФУНКЦИЙ | 2016 |
|
RU2620500C1 |
| УЧЕБНО-ТРЕНИРОВОЧНЫЙ КОМПЛЕКС И СПОСОБ ОБУЧЕНИЯ МАНЕВРЕННОСТИ НА ПРОТЕЗЕ | 2023 |
|
RU2821646C1 |
| Способ реабилитации детей с неврологическими осложнениями, связанными с химиотерапией при остром лимфобластном лейкозе | 2022 |
|
RU2789174C1 |
| АППАРАТ ПОМОЩИ ПРИ ХОДЬБЕ ЧЕЛОВЕКУ С НАРУШЕНИЕМ ОПОРНО-ДВИГАТЕЛЬНЫХ ФУНКЦИЙ (ВАРИАНТЫ) | 2015 |
|
RU2658481C2 |
| КОМПЛЕКТ КОСТЫЛЕЙ ПОЛЬЗОВАТЕЛЯ ДЛЯ УПРАВЛЕНИЯ ЭКЗОСКЕЛЕТОМ | 2015 |
|
RU2598058C1 |
| СПОСОБ УПРАВЛЕНИЯ ЭКЗОСКЕЛЕТОМ НИЖНИХ КОНЕЧНОСТЕЙ ГОЛОСОВЫМИ КОМАНДАМИ | 2019 |
|
RU2745539C2 |
| СПОСОБ АДАПТАЦИИ ЭКЗОСКЕЛЕТА К АНТРОПОМЕТРИЧЕСКИМ ПАРАМЕТРАМ ПОЛЬЗОВАТЕЛЯ | 2019 |
|
RU2733043C2 |
Изобретение относится к медицине, а именно к костылям для экзоскелета с автономным автоматическим изменением длины. Пара костылей снабжена автоматической системой, поддерживающей за счет изменения длины костылей горизонтальность виртуальной линии, соединяющей ручки костылей во фронтальной плоскости движения пользователя. Каждый из костылей снабжен измерителем расстояния, являющимся при этом одновременно светолучевым или лазерным указателем точки поверхности, куда соответствующий костыль должен быть перенесен на следующем шаге. Указанный измеритель расстояния выполнен с возможностью определять бесконтактным способом расстояние от ручки костыля до точки постановки костылей на поверхности на следующем шаге, на которую он указывает. Достигается повышение безопасности пациента при ходьбе в экзоскелете. 1 з.п. ф-лы, 1 ил.
1. Пара костылей для экзоскелета с автономным автоматическим изменением длины каждого из них, отличающаяся тем, что снабжена автоматической системой, поддерживающей за счет изменения длины костылей горизонтальность виртуальной линии, соединяющей ручки костылей во фронтальной плоскости движения пользователя, причем каждый из костылей снабжен измерителем расстояния, являющимся при этом одновременно светолучевым или лазерным указателем точки поверхности, куда соответствующий костыль должен быть перенесен на следующем шаге, причем указанный измеритель расстояния выполнен с возможностью определять бесконтактным способом расстояние от ручки костыля до точки постановки костылей на поверхности на следующем шаге, на которую он указывает.
2. Пара костылей для экзоскелета по п. 1, отличающаяся тем, что автоматическая система пары костылей по беспроводному каналу связи соединена с контроллером управления экзоскелетом для коррекции параметров следующих шагов экзоскелета.
| КОМПЛЕКТ КОСТЫЛЕЙ ПОЛЬЗОВАТЕЛЯ ДЛЯ УПРАВЛЕНИЯ ЭКЗОСКЕЛЕТОМ | 2015 |
|
RU2598058C1 |
| US 2016253890 A1, 01.09.2016 | |||
| US 9468272 B1, 18.10.2016 | |||
| DE 202016102492 U1, 21.06.2016 | |||
| WO 2007002250 A2, 04.01.2007. | |||

