Изобретение относится к медицине, в частности, к хирургическим инструментам. Изобретение решает задачу эффективного высокоточного управления хирургическими элементами калибров 0,3-0,5 мм (30G-25G) на конце трубчато - стержневого рабочего органа. Сущность изобретения заключается в том, что рукоятка с механизмом продольного перемещения рабочего органа и рабочий орган с хирургическими элементами являются неразборными. Регулировка величины хода механизма продольного перемещения производится при сборке рукоятки с рабочим органом. Простота конструкции позволяет производить инструмент также в одноразовом стерильном исполнении.
Известны управляемые хирургические инструменты, содержащие рукоятку, наконечник с трубчато-стержневым рабочим органом, механизм продольного или вращательного перемещения рабочего органа, механизм установки позиции рабочего органа, механизм замены сменного наконечника (Патент РФ 2080095, C1, А61В 17/32, публикация 27.05.1997; Патент US 4258716, А61В 17/32, приоритет 06.02.1978, публикация 31.03.1981 - аналоги). В зависимости от особенностей конструкции инструмент может содержать аспирационный канал, проходящий внутри соосно оси рукоятки (Патент РФ 2080095), либо не может включать таковой (Патент US 4258716).
Трубчато-стержневой рабочий орган, включающий наружную трубку, жестко закрепленную к корпусу наконечника, и соосно-расположенный в ней внутренний стержень с хирургическими элементами на дистальном конце, является сменным элементом.
Рукоятка выполнена в виде полого цилиндра, в который входит сменный наконечник.
В рукоятке размещен механизм продольного или вращательного перемещения рабочего органа, содержащий управляющий рычаг, который через шарнирный механизм (Патент РФ 2080095) либо через механизм фрикционного взаимодействия с торцевой поверхностью плунжера (Патент US 4258716) преобразует усилие от клавиши рычага, взаимодействующей с пальцем хирурга, в перемещение внутреннего стержня рабочего органа.
Недостатки известных инструментов (аналогов):
1. Съемное исполнение наконечника влечет за собой возможные люфты перемещений при настройке хода рабочего органа для калибров хирургических инструментов 25G-30G.
2. Конструкция управляющего рычага, взаимодействующего с пальцем хирурга, не позволяет плавное вращение инструмента в руке, что влечет за собой дополнительный механизм установки позиции рабочего органа, усложняющий конструкцию инструмента. Наличие сменного наконечника также влечет за собой усложнение конструкции, требующей дополнительного механизма замены сменного наконечника и наличия аспирационного канала, проходящего через рукоятку, что делает затруднительным одноразовое исполнение инструмента.
3. Механизм фрикционного взаимодействия плеча управляющего рычага с торцевой поверхностью плунжера (Патент US 4258716), не позволяет выполнение аспирационного канала по единой оси симметрии инструмента.
Известен также управляемый хирургический инструмент, состоящий из рукоятки; наконечника, который содержит трубчато-стержневой рабочий орган с хирургическими элементами на дистальном конце; двух приводных узлов, один из которых расположен в рукоятке (механизм поступательного движения плунжера), а другой - в наконечнике (механизм поступательного движения трубчато-стержневого рабочего органа); механизма вращательного движения наконечника; механизма замены сменного наконечника (Патент US 5893873, А61В 17/32, приоритет 23.10.1995, публикация 13.04.1999 - прототип).
Приведение в действие двух крыльевидных приводных устройств на захватывающей поверхности рукоятки приводит к перемещению плунжера, соединенного с данными приводными устройствами с помощью рычагов. Поступательное перемещение плунжера через приводной узел в наконечнике инструмента приводит в поступательное движение трубчато - стержневой рабочий орган. Указанное движение рабочего органа, в свою очередь, обеспечивает приведение в действие хирургического элемента, который непосредственно участвует в цикле операции.
Вращение наконечника относительно рукоятки обеспечивается приведением в действие устройства (ручки) на противоположном наконечнику конце корпуса рукоятки. Вращение данного устройства приводит к вращению соединенного с ним вала, который проходит через рукоятку, отверстие плунжера и соединяется с наконечником.
Недостатки известного инструмента (прототипа):
1. Съемное исполнение наконечника влечет за собой возможные люфты перемещений при настройке хода рабочего органа для калибров хирургических инструментов 25G-30G.
2. Наличие сменного наконечника и соответственно механизма его замены, дополнительного приводного узла, механизма вращательного движения наконечника влечет за собой усложнение конструкции, что делает затруднительным одноразовое исполнение инструмента.
3. Управление вращением наконечника с помощью устройства находящегося на дальнем, противоположном наконечнику конце корпуса рукоятки может быть неудобным для пользователя, следовательно, может потребоваться помощь еще одного человека в управлении инструментом.
Изобретение решает задачу устранения указанных недостатков и создания высокоточного управляемого хирургического инструмента, в том числе, в одноразовом исполнении.
Сущность настоящего изобретения заключается в том, что управляемый хирургический инструмент, содержащий рукоятку и механизм продольного перемещения с трубчато-стержневым рабочим органом, содержащим хирургические элементы, выполнен в неразъемном виде.
Трубчато-стержневой рабочий орган включает наружную трубку, жестко закрепленную на плунжере механизма продольного перемещения, и соосно-расположенный в ней внутренний стержень с хирургическими элементами на дистальном конце, закрепленный на рукоятке инструмента.
Рукоятка выполнена в виде двух пружинных полукруглых браншей, обеспечивающих при смыкании плавное вращательное движение ее в руке хирурга, и плоского основания, имеющего полый цилиндрический наконечник. В наконечнике рукоятки размещен плунжер продольного перемещения рабочего органа, шарнирно соединенный через рычаги с браншами рукоятки. Рычаги преобразуют угловое перемещение браншей в продольное перемещение плунжера рабочего органа. Регулировка хода рабочего органа осуществляется посредством удержания внутреннего стержня рабочего органа винтами, закрепленными на рукоятке. В рукоятке предусмотрено аспирационное отверстие для промывки рабочего органа.
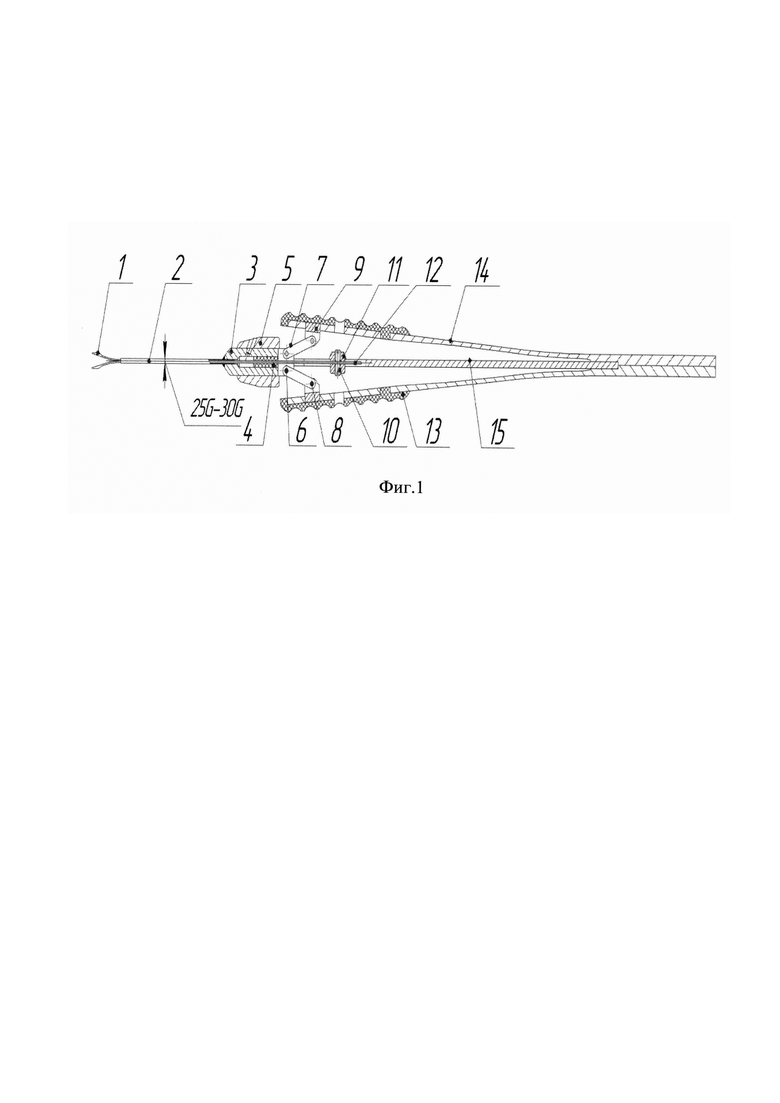
Изобретение иллюстрируется чертежом предлагаемого устройства (Фиг. 1). Данный инструмент содержит рукоятку, выполненную в виде двух пружинных браншей 14 с полукруглыми насадками 13, основания 15 с полым цилиндрическим наконечником 5, в котором предусмотрено аспирационное отверстие, а также двух рычагов 7, закрепленных на шарнирах 8. Рычаги с помощью шарниров 6 преобразуют вращательное движение браншей в поступательное движение плунжера 3 рабочего органа. Плунжер имеет аспирационное отверстие для промывки хирургических элементов 1 через трубку 2, а также заглушку 4, перекрывающую вытекание промывочной жидкости в противоположном направлении. Настройка хирургического инструмента осуществляется посредством крепления внутреннего стержня 12 рабочего органа винтами 10, установленными внутри втулки 11, закрепленной на основании рукоятки.
Преимущества заявляемого инструмента:
1. Полукруглая конструкция бранш рукоятки образует при смыкании рабочего органа круглую форму, обеспечивающую плавное вращение инструмента в руке хирурга.
2. Неразъемное соединение рабочего органа, механизма продольного перемещения и рукоятки обеспечивает высокоточное управление, что необходимо для малых калибров 25G-30G.
3. Аспирационное отверстие для промывки хирургических элементов расположено в непосредственной близости от трубчато-стержневого рабочего органа, что обеспечивает качественную промывку без создания специального аспирационного канала.
4. Простота конструкции позволяет производить инструмент в одноразовом стерильном исполнении.
| название | год | авторы | номер документа |
|---|---|---|---|
| УПРАВЛЯЕМЫЙ ХИРУРГИЧЕСКИЙ ИНСТРУМЕНТ | 1995 |
|
RU2080095C1 |
| Устройство для разрушения и удаления хрусталика с набором одноразовых хирургических инструментов | 2023 |
|
RU2820812C1 |
| ГИБКИЙ ХИРУРГИЧЕСКИЙ ИНСТРУМЕНТ | 1995 |
|
RU2108752C1 |
| ХИРУРГИЧЕСКОЕ УСТРОЙСТВО | 2012 |
|
RU2559922C1 |
| Устройство для удаления катаракты с системами ирригации и аспирации | 2023 |
|
RU2818175C1 |
| ХИРУРГИЧЕСКИЙ ИНСТРУМЕНТ | 2014 |
|
RU2585417C2 |
| ХИРУРГИЧЕСКИЙ ИНСТРУМЕНТ СО СТУПЕНЧАТЫМ СТЕРЖНЕМ | 2014 |
|
RU2661729C2 |
| НАБОР ИНСТРУМЕНТОВ ДЛЯ ОПЕРИРОВАНИЯ ИЗ МАЛЫХ РАЗРЕЗОВ | 2005 |
|
RU2308235C2 |
| ХИРУРГИЧЕСКИЙ ИНСТРУМЕНТ С ХВОСТОВИКОМ | 2014 |
|
RU2591787C2 |
| Устройство для фрагментации и извлечения секвестров | 2024 |
|
RU2824281C1 |
Изобретение относится к медицине, в частности к хирургическим инструментам. Управляемый хирургический инструмент содержит трубчато-стержневой рабочий орган и рукоятку, а также полый цилиндрический наконечник. Рукоятка содержит две полукруглые пружинящие бранши, закрепленные на плоском основании, в котором происходит крепление внутреннего стержня рабочего органа винтами, закрепленными на основании. Полый цилиндрический наконечник соединен с основанием и имеет аспирационное промывочное отверстие и содержит перемещающийся продольно внутри наконечника плунжер рабочего органа, имеющий аспирационное промывочное отверстие и заглушку, перекрывающую вытекание промывочной жидкости в противоположном рабочему органу направлении, соединенный с трубкой рабочего органа и шарнирно соединенный с двумя полукруглыми пружинящими браншами. Использование изобретения позволяет обеспечить эффективное высокоточное управление хирургическими элементами калибров 0,3-0,5 мм (30G-25G) на конце трубчато-стержневого рабочего органа. 1 ил.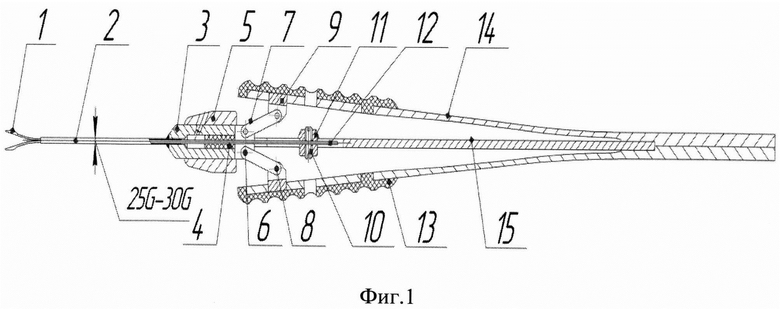
Управляемый хирургический инструмент, содержащий трубчато-стержневой рабочий орган и рукоятку, содержащую две полукруглые пружинящие бранши, закрепленные на плоском основании, в котором происходит крепление внутреннего стержня рабочего органа винтами, закрепленными на основании, а также полый цилиндрический наконечник, соединенный с основанием и имеющий аспирационное промывочное отверстие и содержащий перемещающийся продольно внутри наконечника плунжер рабочего органа, имеющий аспирационное промывочное отверстие и заглушку, перекрывающую вытекание промывочной жидкости в противоположном рабочему органу направлении, соединенный с трубкой рабочего органа и шарнирно соединенный с двумя полукруглыми пружинящими браншами.
| US 5893873 A, 13.04.1999 | |||
| Способ активирования катодной поверхности фотоэлементов | 1929 |
|
SU20228A1 |
| US 5368605 A, 29.11.1994 | |||
| US 5370658 A, 06.12.1994. | |||

