Изобретение относится к механическим манипуляторам, предназначенным для работы в изолированных камерах с радиоактивными, токсичными, агрессивными веществами и исключающим непосредственный контакт человека с этими веществами.
Известен шпатовый манипулятор, содержащий шаровую опору, смонтированную в ней трубу, в которой размещена с возможностью поступательного перемещения штанга имеющая на одном конце замковый орган для крепления сменных инструментов, а на другом - рукоятку управления /1/
Недостатком известного манипулятора является то, что он не обеспечивает полной герметичности перед передаче поступательного движения штанги относительно трубы, что снижает надежность и долговечность при работе.
Недостатки этого решения устранены в выбранном в качестве прототипа шпатовом манипуляторе, содержащем проходку, шаровую опору с уплотнениями, смонтированную в ней трубу, в которой размещена с возможностью поступательного перемещения штанга, с захватом и рукояткой управления на концах. На выходе штанги из трубки установлен герметизирующий сильфон /2/.
К недостатком прототипа следует отнести ограниченную зону обслуживания. Данный недостаток обусловлен тем, что штанга имеет небольшой ход в продольном направлении, величина которого ограничена размерами ведомого плеча курка и величиной деформации сильфона.
Целью изобретения является расширение зоны обслуживания, за счет увеличения хода штанги.
Поставленная цель достигается тем, что в известном шпатовом манипуляторе, содержащем проходку, шаровую опору, смонтированную в ней трубу, в которой размещена подвижная штанга, имеющая на одном конце захват, а на другом - механизм привода, согласно изобретению механизм привода образован герметичным тонкостенным стаканом, жестко установленной на подвижной штанге внутренней обоймой и внешней обоймой, обоймы снабжены роликами, оси которых перпендикулярны оси подвижной штанги причем ролики сгруппированы таким образом, что линии контакта роликов одной обоймы с поверхностью тонкостенного стакана размещены между линиями контакта роликов в другой обоймы.
Отличительные от прототипа признаки существенны, поскольку они необходимы для достижения поставленной цели. Исключение любого из отличительных признаков приведет к тому, что цель не будет достигнута.
Так исключение тонкостенного стакана приведет к нарушению герметичности манипулятора, т.е. сделает его неработоспособным. Замена же тонкостенного стакана на сильфон (как в прототипе) исключает возможность передачи движения от внешней обоймы к внутренней ведомой. Следовательно подвижная штанга не будет перемещаться в продольном направлении, и зона обслуживания не расширяется. Ролики нужны для передачи движения от внешней ведущей обоймы к внутренней ведомой через боковые стенки тонкостенного стакана. Расположение осей роликов перпендикулярно оси подвижной штанги обеспечивает их передвижение вдоль боковых стенок стакана. Такое расположение роликов, когда линии контакта с боковыми стенками тонкостенного стакана роликов одной обоймы расположены между линиями контакта роликов другой обоймы, обеспечивает возвратно-поступательное движение подвижной штанги. Кроме того данный признак необходим для удержания внешней обоймы на тонкостенном стакане.
Из отличительных от прототипа признаков в исследованных аналогах известно размещения выходящего из трубы конца подвижной штанги в тонкостенном герметичном стакане. Также известна установка в конце подвижной штанги внутренней ведомой обойм, а на стакане - внешней ведущей обоймы /3/.
Заявляемое взаимное расположение роликов внешней и внутренней обойм в аналогах не обнаружено. Выполнение рабочих тел, обеспечивающих передачу поступательного движения от внешней обоймы к внутренней, в форме роликов также является неизвестным признаком, т.к. известная в аналоге шарообразная форма рабочих тел /3/ не эквивалентна заявляемой. Действительно, при шарообразной форме рабочих тел шарики разных обойм будут смещаться относительно друг друга в плоскости перпендикулярной оси подвижной штанги. В результате шарики одной обоймы окажутся в выемках между шариками другой обоймы, что приведет к проскальзыванию одной обоймы относительно другой при поступательном перемещении. При выполнении рабочих тел в форме роликов в контакт между роликами разных обойм осуществляется по линии, что исключает их проскальзывание друг относительно друга при поступательном перемещении.
Таким образом заявляемы шпатовый манипулятор отвечает критерию «существенные отличия».
Сущность предполагаемого изобретения пояснена чертежами. Где на фиг. 1 изображен продольный разрез манипулятора; на фиг. 2 поперечный разрез А-А.
Манипулятор содержит проходку 1, образованную сферическими элементами, шаровую опору 2 с фиксатором 3. В шаровой опоре смонтирована труба 4. Через трубу 4 пропущена подвижная штанга 5, на одном конце которой установлен захват в 6, а на другом внутренняя обойма 7. Конец подвижной штанги 5 с внутренней обоймой 7 помещен в герметичный тонкостенный стакан 8, жестко закрепленный на фланце трубы 4. Между внутренней обоймой 7 и днищем стакана 8 на подвижной штанге 5 свободно установлена пружина 9. Внутренняя обойма 7 выполнена с проушинами 10, придающими ей крестообразную форму. В отверстия проушин 10 вмонтированы оси 11, перпендикулярные подвижной штанги 5, на которых установлены ролики 12, контактирующие с внутренней поверхностью боковых стенок герметичного тонкостенного стакана 8. Снаружи герметичного тонкостенного стакана 8 напротив обоймы 7 установлена внешняя обойма 13, к которой прикреплен управляющий штурвал 14. Внешняя обойма 13 выполнена кольцеобразной с проушинами 15 для фиксации осей 16 роликов 17. Ролики 17 сгруппированы попарно, причем пары расположены вдоль боковых стенок герметичного тонкостенного стакана 8. Линии контакта роликов 17 с поверхностью тонкостенного стакана 8 расположены по обе стороны относительно линий контакта роликов 12 с поверхностью стакана 8. Ролики 12 и 17 поджаты к боковой поверхности стакана.
Шпатовый манипулятор работает следующим образом.
Захват 6 получает качательное движение от управляющего штурвала 14 через подвижную штангу 5, качающуюся вместе с трубой 4. Труба 4 совершает движения вместе с шаровой опорой, которая поворачивается в вертикальных плоскостях. Вращательные движения захвата 6 создаются вращением управляющего штурвала 14 вокруг своей оси. При повороте управляющего штурвала 14 он вращает герметичный тонкостенный стакан 8, внутреннюю обойму 7, подвижную штангу 5, трубу 4 и шаровую опору 2 в горизонтальной плоскости.
Для придания захвату 6 поступательного движения управляющим штурвалом 14 перемещают внешнюю обойму 13 вдоль боковых стенок герметичного тонкостенного стакана 8. Благодаря поджатию роликов 12 и 17 к тонкостенному стакану 8, боковые стенки которого, образуя волну, огибающую эти ролики, фиксируют внешнюю обойму 13 относительно внутренней обоймы 7. При продольном перемещении внешней обоймы 13 ролики 17 через боковые стенки тонкостенного стакана 8 давят на ролики 12, которые проворачиваясь относительно своих осей 11, двигаются вместе с роликами 17. Ролики 12 перемещают внутреннюю обойму 7 вместе с подвижной штангой 5 и захватом 6. Перемещая внешнюю обойму 13 в сторону шаровой опоры 2, сжимают пружину 9. Движение подвижной штанги 5 в обратном направлении совершается под действием сил упругости пружины 9, после снятия усилий с управляющего штурвала 14.
Тонкостенный стакан 8 при всех видах движения герметизирует выход подвижной штанги 5 из трубы 4.
Предлагаемый манипулятор по сравнению с прототипом обеспечивает расширение зоны обслуживания, благодаря увеличению хода подвижной штанги. В заявляемом решении величина хода подвижной штанги определяется длиной тонкостенного стакана, а в прототипе она ограничена размерами ведомого плеча курка, увеличение которых практически невозможно.
| название | год | авторы | номер документа |
|---|---|---|---|
| Шпаговый манипулятор | 2018 |
|
RU2691352C1 |
| Шпаговый манипулятор | 2018 |
|
RU2691177C1 |
| Манипулятор | 2017 |
|
RU2671231C2 |
| Шпаговый манипулятор | 2018 |
|
RU2691171C1 |
| Манипулятор, работающий в герметизированном объеме | 1990 |
|
SU1785897A1 |
| МАНИПУЛЯТОР | 2018 |
|
RU2697292C1 |
| Шпаговый манипулятор | 2018 |
|
RU2698114C2 |
| БАЛЛИСТИЧЕСКИЙ МАНИПУЛЯТОР | 2019 |
|
RU2720756C1 |
| Баллистический манипулятор | 2018 |
|
RU2686166C1 |
| Шпаговый манипулятор | 2018 |
|
RU2691349C1 |

Изобретение относится к механическим манипуляторам, предназначенным для работы в изолированных камерах с радиоактивными, токсичными, агрессивными веществами. Шаровая опора 2 манипулятора размещена в проходке 1. В шаровой опоре смонтирована труба 4, в которой размещена подвижная штанга 5, имеющая на одном конце захват 6, а на другом внутреннюю обойму 7. Конец подвижной штанги 5 с внутренней обоймой 7 помещен в герметичном тонкостенном стакане 8, на котором установлена внешняя обойма 13. Обе обоймы снабжены роликами 12 и 17 с осями, перпендикулярными оси подвижной штанги 5. Ролики 12 и 17 сгруппированы таким образом, что линии контакта роликов в одной обойме с боковой поверхностью тонкостенного стакана 8 размещены между линиями контакта роликов, другой обоймы, в результате боковые стенки стакана 8 образуют волны, огибающие ролики 12 и 17. Эти волны при продольном перемещении внешней обоймы 13 движутся вдоль стакана 8, перемещая внутреннюю обойму 7. Изобретение обеспечивает расширение зоны обслуживания. 2 ил.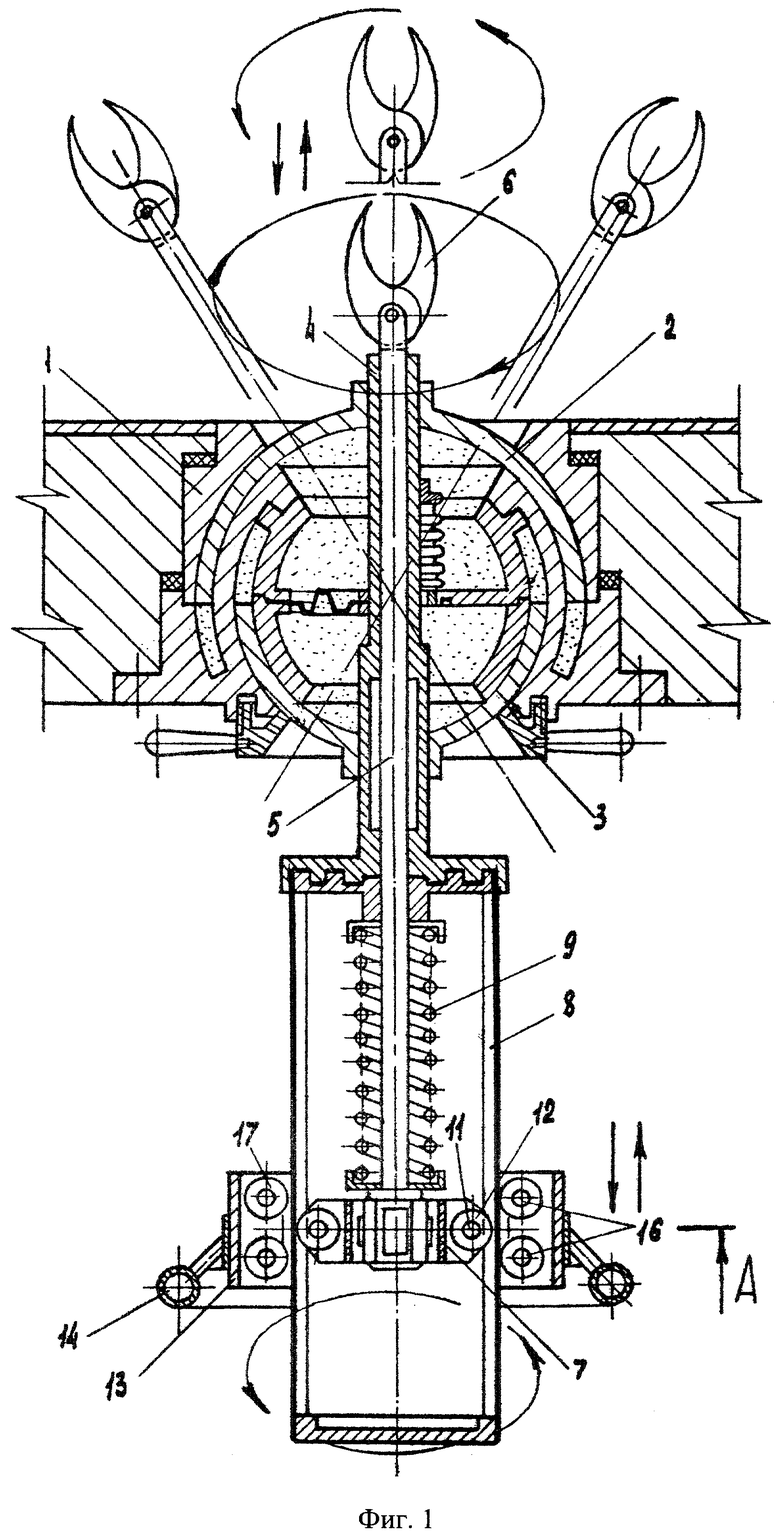
Шпаговый манипулятор, содержащий размещенную в проходке шаровую опору, трубу, смонтированную в шаровой опоре, размещенную в трубе подвижную штангу, захват, установленный на одном конце подвижной штанги, и механизм привода, смонтированный с противоположной стороны штанги, отличающийся тем, что механизм привода содержит герметичный тонкостенный стакан, жестко закрепленный на фланце упомянутой трубы, внутреннюю обойму, размещенную в стакане и закрепленную на конце подвижной штанги, и установленную снаружи упомянутого стакана внешнюю обойму с прикрепленным к ней управляющим штурвалом, при этом упомянутые обоймы снабжены роликами, оси которых перпендикулярны оси подвижной штанги, сгруппированными с возможностью размещения линий контакта с поверхностью тонкостенного стакана роликов одной обоймы между линиями контакта роликов другой обоймы, причем ролики поджаты к тонкостенному стакану с образованием на стенке волны, огибающей упомянутые ролики, а на подвижном штоке между внутренней обоймой и днищем стакана свободно установлена пружина.
| Шпаговый манипулятор | 1980 |
|
SU965759A1 |
| ШПАГОВЫЙ МАНИПУЛЯТОР | 0 |
|
SU177749A1 |
| МАНИПУЛЯТОР | 0 |
|
SU320097A1 |
| Манипулятор шпагового типа | 1960 |
|
SU137594A1 |
| WO 2012153871 A1, 15.11.2012. | |||

