Изобретение относится к области машиностроения и мпжет использоваться для автоматизации технологических операций (при изготовлении электронных приборов, обработки радиоактивных, токсических и взрывчатых веществ, а также при осуществлении ряда дистанционных работ, производимых в открытом космосе, под водой, и в медицине), требующих значительного числа точек позиционирования.
Известен манипулятор, содержащий кинематическую цепь из сочлененных между собой звеньев, входное звено которой связано с приводом и основанием, а выходное - с захватом. Кинематическая цепь выполнена из чередующихся рабочих и переходных звеньев, снабженных направляющими на торцах. Направляющие на верхних и нижних торцах переходных звеньев сориентированы взаимно перпендикулярно. Рабочие звенья и основание шарнирно связаны со штангой. Привод выполнен в виде двух пар силовых цилиндров со штоками, связанными с нижним рабочих звеном. Пары силовых цилиндров установлены перпендикулярно друг другу. Силовые цилиндры перемещают нижнее рабочее звено в нужном направлении. А нижнее рабочее звено отклоняет штангу от вертикали. Ввиду того, что основание неподвижно и шарнирно связано со штангой, поворот штанги вызывает взаимное смещение остальных рабочих звеньев. Каждое последующее звено смещается относительно основания на большую величину, чем предыдущее.
Недостатком известного решения является то, что рабочий орган не изолирован от привода и от внешней среды. Отсутствие такой изоляции не позволяет использовать данное устройство при работе в высоком вакууме, с радиоактивными, токсическими и агрессивными веществами. Кроме того, известный манипулятор непригоден для технологических процессов, к которым предъявляются повышенные требования к стерильности рабочей среды, так как продукты (микрочастицы) износа (в виде микро- пылинок), выделяемые при работе (кинематических) пар трения привода, попадают непосредственно в зону обслуживания, в результате чего может быть нарушен состав технологической вакуумной среды в рабочем объеме оборудования, что неблагоприятно воздействует на протекание основного процесса обработки,
Наиболее близким к заявляемому является выбранный в качестве прототипа манипулятор, содержащий корпус, установленную на нем механическую руку с приводами горизонтального и вертикального
перемещений в виде силовых цилиндров, механизм позиционирования и ограничитель хода механической руки. Механизм позиционирования выполнен в виде зубчатой
рейки с размещенным на ней ползуном. Механическая рука образована кареткой, подвижной штангой, схватом. В каретке механической руки установлен корпус цилиндра вертикального перемещения, а по0 движная штанга механической руки является штоком этого цилиндра. Каретка механической руки закреплена на подвижном корпусе цилиндра горизонтального перемещения, Шток которого неподвижно
5 закреплен между стенками корпуса.
Недостатком прототипа, как и аналога, является то, что его конструкция не позволяет изолировать рабочую зону, где схват механической руки (например, вместе с об0 рабатываемым предметом), от внешней среды. Следовательно прототип также не может быть использован для работы в герметизированном объеме (в качестве сте- рильного манипулятора).
5Целью изобретения является обеспечение биологической защиты за счет изоляции (стерилизации) зоны, в которой находится схват (и обрабатываемый предмет), от операторской зоны.
0
Поставленная цель достигается тем, что манипулятор, содержащий крышку вакуум- .ной камеры, на которой смонтированы исполнительный орган и механизмы его
5 линейного перемещения и поворота, снабжен герметичным стаканом, закрепленным краями в стенках камеры, а механизмы линейного перемещения и поворота исполнительного органа выполнены в виде внешней
0 и внутренней обойм с роликами, установленными с возможностью поворота посредством кронштейнов, и двух штоков с маховиками, закрепленными концами в стенках камеры и размещенными в полости
5 герметичного стакана, причем конец штока механизма линейного перемещения выполнен полым с четырехгранной полостью, а конец штока механизма поворота выполнен четырехгранным и установлен в полости
0 штока механизма линейного перемещения, при этом внутренняя обойма установлена на штоке механизма поворота с возможностью перемещения вдоль него и жестко связана со штоком механизма линейного
5 перемещения, а внешняя обойма установлена на герметичном стакане, и линии контактов ее роликов с герметичным (цельнометаллическим) стаканом лежат между линиями контакта роликов внутренней обоймы.
Отличительные от прототипа признаки являются существенными, так как каждый из них необходим, а вместе с ограничительными достаточны для достижения поставленной цели. Герметичный тонкостенный (цельнометаллический) стакан, закрепленный в стенках герметичной камеры (которые могут быть бортом космического корабля), обеспечивает изоляцию рабочей зоны (где находится предмет обработки) от операторской зоны. Установленные друг против друга внутренняя и внешняя обоймы с роликами, контачащими (контактирующими) с поверхностью тонкостенного (цельнометаллического) стакана, обеспечивают передачу движения от маховиков к штанге со схватом через стенку тонкостенного (цельнометаллического )стакана, не нарушая его герметичности, при этом осуществляя передачу комбинированного ввода движения. Закрепление роликов на поворотных кронштейнах обеспечивает комбинированную передачу от внутренней обоймы к внешней двух видов независимого движения: линейного (возвратно- поступательного) и вращательного. Расположение линий контакта роликов одной обоймы с поверхностью тонкостенного (цельнометаллического) стакана между линиями контакта роликов другой обоймы необходимо для передачи комбинированного ввода движений в прямом и обратном направлениях, и пр.
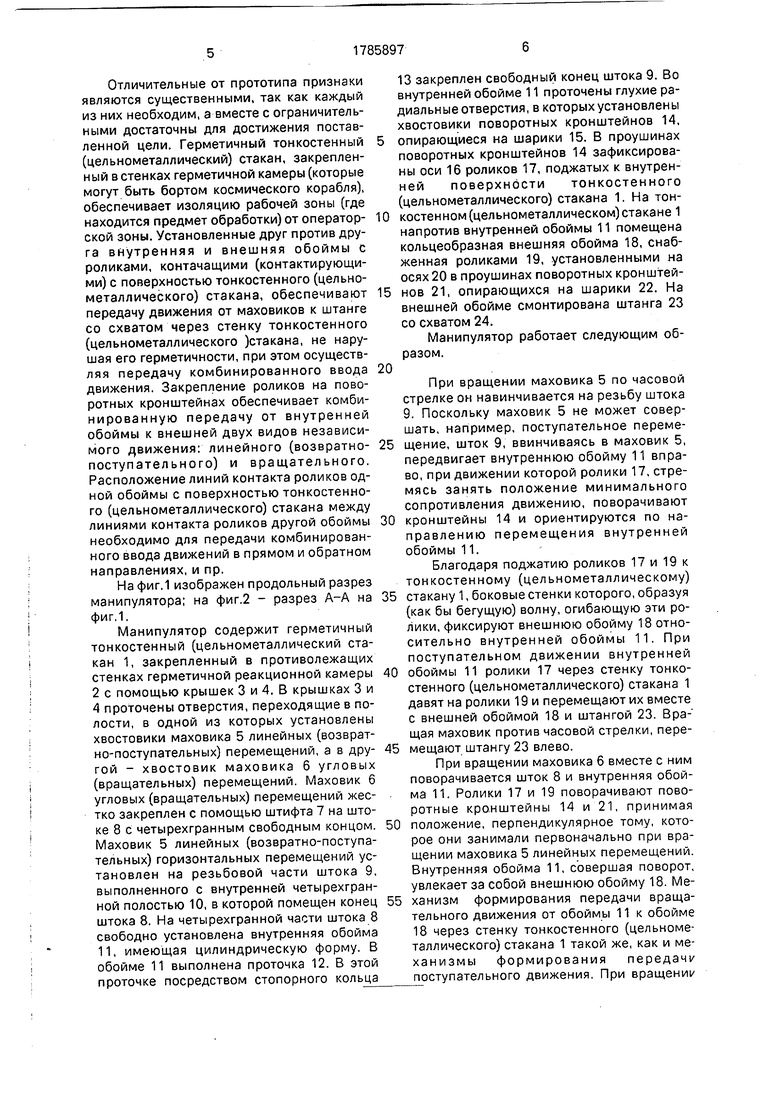
На фиг.1 изображен продольный разрез манипулятора; на фиг.2 - разрез А-А на фиг.1.
Манипулятор содержит герметичный тонкостенный (цельнометаллический стакан 1, закрепленный в противолежащих стенках герметичной реакционной камеры 2 с помощью крышек 3 и 4. В крышках 3 и 4 проточены отверстия, переходящие в полости, в одной из которых установлены хвостовики маховика 5 линейных (возвратно-поступательных) перемещений, а в другой - хвостовик маховика 6 угловых (вращательных) перемещений. Маховик б угловых (вращательных) перемещений жестко закреплен с помощью штифта 7 на штоке 8 с четырехгранным свободным концом. Маховик 5 линейных (возвратно-поступательных) горизонтальных перемещений установлен на резьбовой части штока 9, выполненного с внутренней четырехгранной полостью 10, в которой помещен конец штока 8. На четырехгранной части штока 8 свободно установлена внутренняя обойма 11, имеющая цилиндрическую форму, В обойме 11 выполнена проточка 12. В этой проточке посредством стопорного кольца
13 закреплен свободный конец штока 9. Во внутренней обойме 11 проточены глухие радиальные отверстия, в которых установлены хвостовики поворотных кронштейнов 14,
опирающиеся на шарики 15. В проушинах поворотных кронштейнов 14 зафиксированы оси 16 роликов 17, поджатых к внутренней поверхности тонкостенного (цельнометаллического) стакана 1. На тон0 костенном(цельнометаллическом)стакане 1 напротив внутренней обоймы 11 помещена кольцеобразная внешняя обойма 18, снабженная роликами 19, установленными на осях 20 в проушинах поворотных кронштей5 нов 21, опирающихся на шарики 22. На внешней обойме смонтирована штанга 23 со схватом 24.
Манипулятор работает следующим образом.
0
При вращении маховика 5 по часовой стрелке он навинчивается на резьбу штока 9. Поскольку маховик 5 не может совершать, например, поступательное переме5 щение, шток 9, ввинчиваясь в маховик 5, передвигает внутреннюю обойму 11 вправо, при движении которой ролики 17, стремясь занять положение минимального сопротивления движению, поворачивают
0 кронштейны 14 и ориентируются по направлению перемещения внутренней обоймы 11.
Благодаря поджатию роликов 17 и 19 к тонкостенному (цельнометаллическому)
5 стакану 1, боковые стенки которого, образуя (как бы бегущую) волну, огибающую эти ролики, фиксируют внешнюю обойму 18 относительно внутренней обоймы 11. При поступательном движении внутренней
0 обоймы 11 ролики 17 через стенку тонкостенного (цельнометаллического) стакана 1 давят на ролики 19 и перемещают их вместе с внешней обоймой 18 и штангой 23. Вра- щая маховик против часовой стрелки, пере5 мещают штангу 23 влево.
При вращении маховика 6 вместе с ним поворачивается шток 8 и внутренняя обойма 11. Ролики 17 и 19 поворачивают поворотные кро.нштейны 14 и 21, принимая
0 положение, перпендикулярное тому, которое они занимали первоначально при вращении маховика 5 линейных перемещений. Внутренняя обойма 11, совершая поворот, увлекает за собой внешнюю обойму 18. Ме5 ханизм формирования передачи вращательного движения от обоймы 11 к обойме 18 через стенку тонкостенного (цельнометаллического) стакана 1 такой же, как и механизмы формирования передач / поступательного движения. При вращение
внешней обоймы штанга 23 совершает угловые (вращательные 1 перемещения, осущест- вляя передачу и формирование их в герметизированном объеме.
Предлагаемая конструкция позволяет осуществить сложную комбинированную и независимую передачу вращательного и возвратно-поступательного движения (и его формирования в герметизированном объеме), через стенку тонкостенного (цельнометаллического) стакана, изолирующего рабочий орган от привода (либо отделяющего рабочее пространство манипулятора от нерабочего).
Благодаря герметичному (цельнометаллическому) стакану, полностью исключается попадание радиоактивных, токсичных и агрессивных веществ в операторскую зону, а также посредством его применения полностью исключается разгерметизация зоны обрабатываемого предмета. Кроме того, по сравнению с прототипом, существенно сокращается количественное наличие (кинематических) пар трения, находящихся в рабочей зоне..
Все это позволит, в конечном итоге, резко сократить общие затраты на дизактева- цию рабочих помещений и на лечебно-профилактические мероприятия, даст возможность обеспечить технику безопасности работающего персонала и резко увеличить объемы выпуска и качества выпускаемой продукции.
0
5
0
5
0
Формула изобретения ;
Манипулятор, работающий в герметизированном объеме, содержащий крышки вакуумной камеры, на крторых смонтированы исполнительный орган и механизмы его линейного перемещения и поворота, о т л и- чающийся тем, что, с целью расширения технологических возможностей за счет увеличения зоны обслуживания, он снабжен герметичным стаканом, закрепленным краями в стенках камеры, а механизмы линейного перемещения и поворота исполнительного органа выполнены в виде внешней и внутренней обойм с роликами, установленными с возможностью поворота посредством кронштейна, и двух штоков с маховиками, закрепленных концами в стенках камеры и размещенных в полости герметичного стакана, причем конец штока механизма линейного перемещения выполнен полым с четырехгранной полостью, а конец штока механизма поворота выполнен четырехгранным и установлен в полости штока механизма линейного перемещения, при этом внутренняя обойма установлена на штоке механизма поворота с возможностью перемещения вдоль него и жестко связана со штоком механизма линейного перемещения, а внешняя обойма установлена на герметичном стакане, и линии контактов роликов внутренней обоймы с герметичным металлическим стаканом лежат между линиями контакта роликов внешней обоймы.
А-А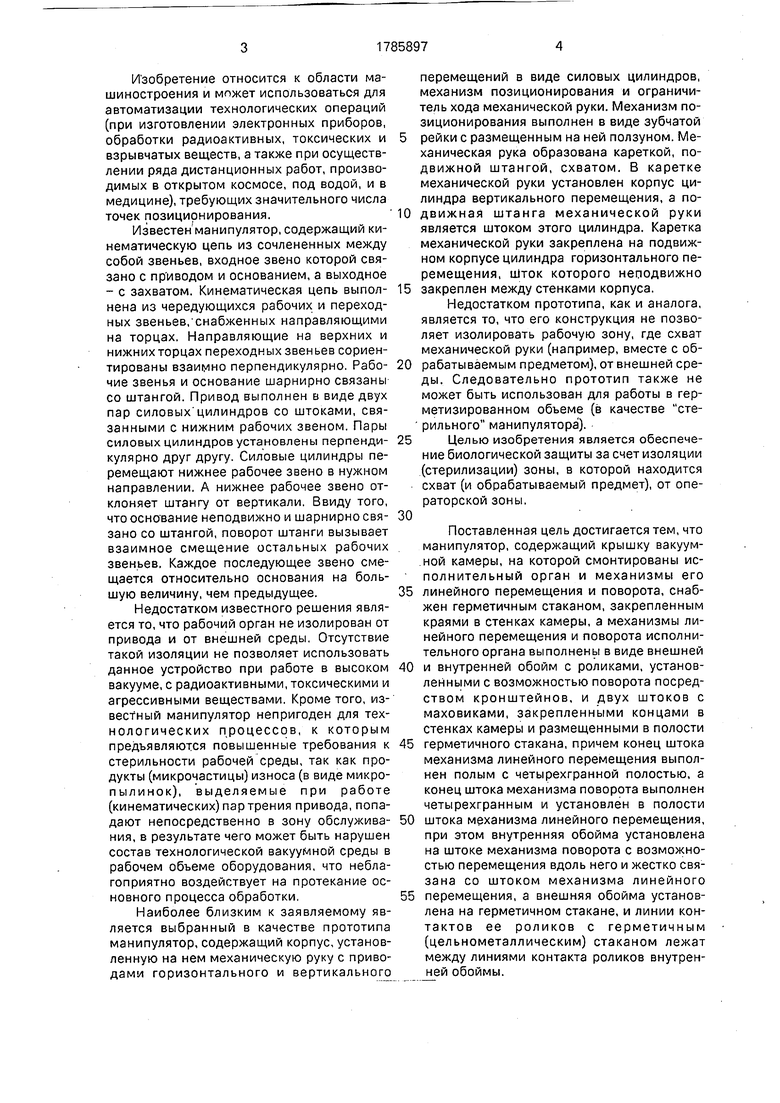

| название | год | авторы | номер документа |
|---|---|---|---|
| Шпаговый манипулятор | 2018 |
|
RU2691167C1 |
| Манипулятор к доильным аппаратам | 1982 |
|
SU1113055A1 |
| Манипулятор | 1977 |
|
SU707792A1 |
| Животноводческое помещение | 1983 |
|
SU1158119A2 |
| Исполнительный орган робота | 2015 |
|
RU2653397C2 |
| Шпаговый манипулятор | 2018 |
|
RU2691352C1 |
| Манипулятор | 1982 |
|
SU1065185A1 |
| Манипулятор с программным управлением | 1981 |
|
SU984858A1 |
| Промышленный робот | 1979 |
|
SU908242A3 |
| Манипулятор для кладки стен из штучных элементов | 1989 |
|
SU1712561A1 |
Использование: атоматизация технологических операций в машиностроении. Сущность изобретения: манипулятор, работающий в герметизированном объеме, содержит крышки 3 и 4 вакуумной камеры 2, на которых смонтированы исполнительный орган 23 и механизмы его линейного перемещения и поворота. Причем механизмы ис- полнительного органа размещены в герметичном стакане 1, закрепленном на противоположных стенках вакуумной камеры 2, и выполнены в виде внешней 18 и внутренней 11 обойм с роликами 19 и 17, установленными с возможностью поворота посредством кронштейнов, и двух штоков 8 и 9 с маховиками 5 и 6, размещенных в полости герметичного стакана, причем конец штока 9 механизма линейного перемещения выполнен полым с четырехгранной полостью, а шток 8 механизма поворота выполнен четырехгранным и установлен в полости штока 9. Внутренняя обойма установлена на штоке 8 с возможностью перемещения вдоль него и жестко связана с концами штока 9. Кроме этого, линии контакта роликов 17с герметичным стаканом 1 лежат между линиями контакта роликов 19. 2. ил. оч С
