Изобретение относится к области проведения испытаний огневых комплексов и может быть использовано для определения априорной точности их стрельбы (ошибок доставки боеприпасов к цели) с использованием морской мишенной позиции (ММП). В состав ММП входят средства навигационного обеспечения, используемые для определения собственных текущих координат, а также, в частности, оптико-электронная система определения результатов стрельбы (СОРС), используемая для определения точек падения (или срабатывания) боеприпасов или их моделей относительно заданной точки прицеливания.
При гиперзвуковых скоростях боеприпасов и незначительной высоте полета боеприпасов работа оптико-электронных измерительных средств, размещаемых на ММП, не может обеспечить требуемую точность определения ошибок доставки боеприпасов к цели.
В соответствии с этим требуется разработать специальные средства, устраняющие этот недостаток.
Известен способ определения координат сверхзвукового низколетящего над морской поверхностью (МП) объекта [RU 2419105, CI, G01S13/06, 20.05.2011] по радиолокационно наблюдаемому следу на МП, способный осуществляться как при наличии, так и при отсутствии радиолокационного отражения от самого объекта; производимый по аномалии морской поверхности (АМП), скорость перемещения фронта и другие признаки которой позволяют классифицировать ее как след низколетящего над МП объекта; осуществляемый расположенным на судне автономным радиолокатором в пределах радиогоризонта, при этом, до обнаружения следа (АМП) производится определение среднего уклона крупных волн МП, скорости распространения поверхностных (ветровых) волн МП, скорости распространения звуковых волн над МП; после обнаружения следа (АМП) радиолокационным способом определяются дальность до фронта следа и пеленг на фронт следа, производится измерение ширины следа способом радиолокационного стробирования по дальности; курс движения объекта определяется пространственной ориентацией следа; курсовой угол с фронта следа на радиолокатор вычисляется в случае, если пеленг с радиолокатора на фронт следа больше курса объекта, как модуль разности, где уменьшаемое - пеленг с радиолокатора на фронт следа, вычитаемое - сумма курса фронта следа и 180°, а в противном случае как модуль разности, где уменьшаемое -сумма пеленга с радиолокатора на фронт следа и 180°, вычитаемое - курс фронта следа; дальность до объекта вычисляется как корень квадратный суммы трех слагаемых, первое слагаемое - квадрат дальности до фронта следа, второе слагаемое - отрицательное удвоенное произведение дальности до фронта следа, скорости объекта, косинуса курсового угла с фронта следа на радиолокатор и суммы двух отношений, в первом из которых произведение усредненной измеренной ширины следа, косинуса курсового угла с фронта следа на радиолокатор, котангенса суммы 12,7° и среднего уклона крупных волн МП делится на удвоенную скорость звука над МП, во втором - произведение корня квадратного из 2 и длины волны радиолокатора делится на произведение величины ж, скорости распространения поверхностных волн и косинуса угла скольжения при облучении МП радиолокатором, третье слагаемое - произведение квадрата скорости объекта на квадрат суммы двух отношений, в первом из которых произведение усредненной измеренной ширины следа, косинуса курсового угла с фронта следа на радиолокатор, котангенса суммы 12,7° и среднего уклона крупных волн МП делится на удвоенную скорость звука над МП, во втором - произведение корня квадратного из 2 и длины волны радиолокатора делится на произведение величины я, скорости распространения поверхностных волн и косинуса угла скольжения при облучении МП радиолокатором; пеленг на объект вычисляется как сумма (в случае при превышении пеленга на фронт следа над курсом объекта отрицательного значения разности, где уменьшаемое - пеленг на фронт следа, вычитаемое - сумма курса объекта и 180°, или в случае при превышении курса объекта над пеленгом на фронт следа отрицательного значения разности, где уменьшаемое - сумма пеленга на фронт следа и 180°, вычитаемое - курс объекта, пеленг на объект вычисляется как разность) пеленга на фронт следа и арксинуса отношения, где числитель - синус курсового угла с фронта следа на радиолокатор, знаменатель - корень квадратный суммы трех слагаемых, первое слагаемое - отношение квадрата дальности до фронта следа к произведению квадратов скорости объекта и суммы двух отношений, в первом из которых произведение усредненной измеренной ширины следа, косинуса курсового угла с фронта следа на радиолокатор, котангенса суммы 12,7° и среднего уклона крупных волн МП делится на удвоенную скорость звука над МП, во втором - произведение корня квадратного из 2 и длины волны радиолокатора делится на произведение величины ж, скорости распространения поверхностных волн и косинуса угла скольжения при облучении МП радиолокатором, второе слагаемое -отрицательное отношение дальности до фронта следа к произведению скорости объекта и суммы двух отношений, в первом из которых произведение усредненной измеренной ширины следа и котангенса суммы 12,7° и среднего уклона крупных волн МП делится на учетверенную скорость звука над МП, во втором - длина волны радиолокатора делится на произведение корня квадратного из 2, величины л, скорости распространения поверхностных волн, косинуса курсового угла с фронта следа на радиолокатор и косинуса угла скольжения при облучении МП радиолокатором, третье слагаемое -единица.
Недостатком этого технического решения является относительно высокая сложность.
Известен также способ определения координат точки падения боеприпаса [RU 2516205, С2, F41J 5/00, 20.05.2014], основанный на установке по периметру испытательного полигона сейсмических регистраторов, приеме и анализе параметров сейсмических колебаний, определении координат точки удара боеприпаса о грунт - эпицентра сейсмических колебаний по их параметрам, при этом, дополнительно устанавливают по периметру испытательного полигона оптико-электронные пеленгаторы, принимают рассеянное атмосферным каналом распространения оптическое излучение источника - факела взрыва боеприпаса, измеряют значения углов пеленгов на источник оптического излучения - факел взрыва боеприпаса и определяют координаты точки падения боеприпаса по координатам точки пересечения линий пеленгов.
Недостатком этого технического решения является относительно узкая область применения, поскольку он может быть использован только при наземных испытаниях, когда имеется удар боеприпаса о грунт
Наиболее близким по технической сущности к предложенному является способ определения координат точки падения боеприпасов [RU 2593523, С2, F41J 5/00, 10.08.2016], основанный на установке по периметру испытательного полигона оптико-электронных пеленгаторов, измерении углов пеленгов на источники оптических сигналов, возникающих при падении боеприпасов на грунт, при этом, дополнительно измеряют оптико-электронными пеленгаторами спектрально-пространственные распределения изображений оптических сигналов источников излучений, возникающих при падении боеприпасов на грунт, сравнивают их значения между собой и по их совпадению определяют принадлежность измеренных пеленгов источников оптических сигналов, возникающих при падении боеприпасов на грунт, боеприпасам, определяют координаты точек падения боеприпасов по координатам точек пересечения линий своих пеленгов.
Недостатком этого технического решения является относительно узкая область применения, поскольку он может быть использован только при наземных испытаниях, когда имеется удар боеприпаса о грунт и обеспечивается прием и обработка оптических сигналов, возникающих при падении боеприпасов на грунт.
Это ограничивает область применения способа, поскольку он может быть использован при стрельбе по целям, размещенным на грунте, и только при условии, когда возникает оптический сигнал при ударе боеприпаса о грунт, что сужает арсенал технических средств, которые могут быть использованы для определения координат точек падения боеприпасов в процессе проведения испытаний для априорной оценки ошибок их доставки при стрельбе по морским целям, в том числе для низколетящих над морской поверхностью боеприпасов.
Задачей, которая решается в изобретении, является расширение области применения способа с целью обеспечения возможности его использования для определения координат точек падения боеприпасов в процессе проведения испытаний при априорной оценке ошибок их доставки при стрельбе по морским целям, включая низколетящие над морской поверхностью боеприпасы.
Требуемый технический результат заключатся в расширении области применения способа с целью обеспечения возможности его использования для определения координат точек падения боеприпасов в процессе проведения испытаний при априорной оценке ошибок их доставки при стрельбе по морским целям.
Поставленная задача решается, а требуемый технический результат достигается тем, что, используют пеленгаторы для измерения углов пеленга на летящий боеприпас в районе расчетной точки его падения и определяют траекторию полета боеприпаса и точку его падения по координатам точек пересечения линий пеленгов, согласно изобретению, пеленгаторы устанавливают на беспилотные летательные аппараты, которые перед расчетным временем доставки боеприпаса поднимают на кабелях-привязях в разнесенные точки пространства над морской мишенной позицией, которую предварительно доставляют в район расчетной точки падения боеприпаса и координаты которой уточняют с использованием глобальной навигационной системы, при этом, результаты измерения углов пеленга на летящий боеприпас в районе расчетной точки его падения от каждого из беспилотного летательного аппарата и определение траекторию полета боеприпаса и точку его падения по координатам точек пересечения линий пеленгов производят на средстве обработки и управления, размещенном на морской мишенной позиции, куда направляют результаты измерений по кабелям-привязям, которые используют для силового удержания беспилотных летательных аппаратов и передачу на их борт управляющих сигналов.
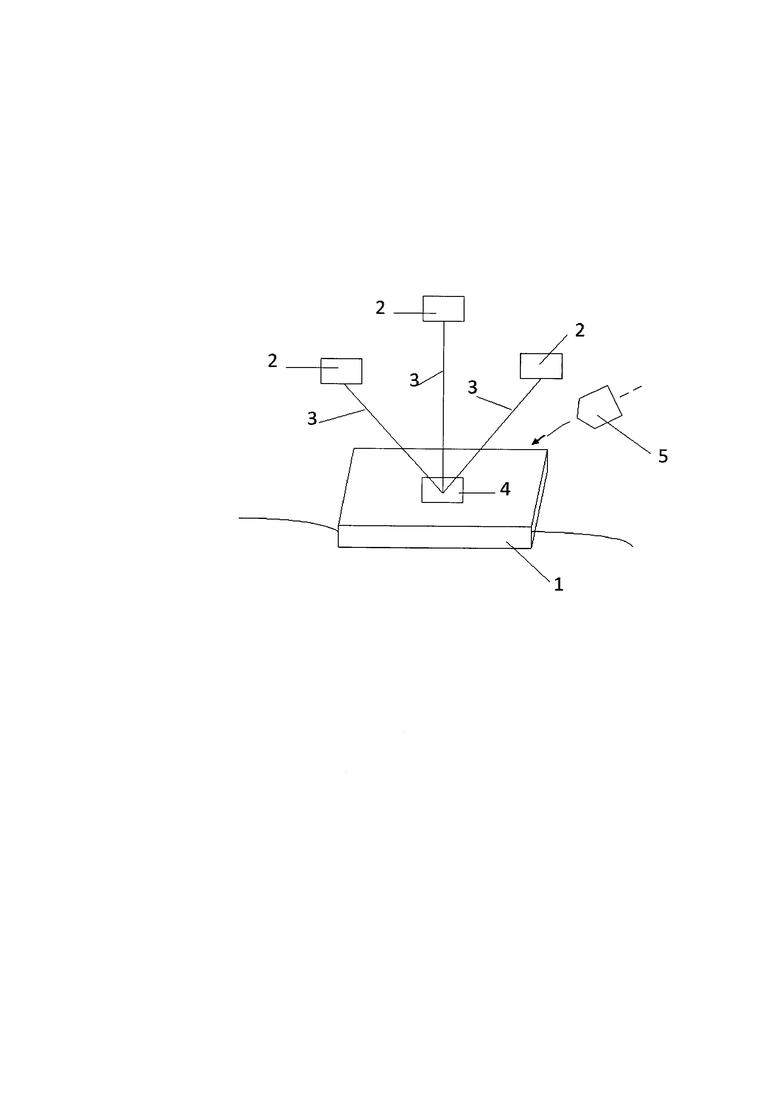
На чертеже представлен пример системы определения точек падения боеприпасов в процессе проведения испытаний при априорной оценке ошибок их доставки при стрельбе по морским целям, реализующей предложенный способ.
На чертеже обозначены:
1 - морская мишенная позиция;
2 - беспилотные летательные аппараты;
3 - кабели-привязи;
4 - средство обработки и управления;
5 - боеприпас.
Система определения точек падения боеприпасов в процессе проведения испытаний при априорной оценке ошибок их доставки при стрельбе по морским целям, реализующей предложенный способ, работает следующим образом.
В район проведения испытаний доставляют морскую мишенную позицию (ММП) 1, представляющую собой морское судно, платформу, баржу и т.п.Как правило, она доставляется в район расчетной точки падения боеприпаса. Координаты ММП 1 уточняют с использованием глобальной навигационной системы, соответствующие элементы которой размещают на ней.
На морской мишенной позиции 1 размещают беспилотные летательные аппараты 2, которые перед расчетным временем доставки боеприпаса поднимают на кабелях-привязях 3 в разнесенные точки пространства над ММП 1. Для этого морская мишенная позиция 1 может быть оснащена барабанами кабелей-привязи 3 беспилотных летательных аппаратов 2, обеспечивающих намотку-размотку кабелей-привязей 3 беспилотных летательных аппаратов, функционирующих в привязном режиме. Кабели-привязи 3 выполняют функцию не только силового удержания беспилотного летательного аппарата 2, но и передачу на его борт и снятия с борта информационных сигналов (управления, пеленга, телеметрии, фото и видеоданных и т.п.), а также, при необходимости, подачи его борт напряжения питания.
Используя средства беспилотных летательных аппаратов 2, обеспечивающих их перемещение в пространстве, производят их размещение в разнесенных точках пространства с учетом ожидаемого направления прилета боеприпаса, в том числе, при необходимости, с учетом возможности испытаний низколетящих с гиперзвуковой скоростью образцов, и условий наиболее точного определения его траектории на конечном участке с целью определения точки его падения.
Навигационная привязка ММП 1 и управляемое размещение относительно ее беспилотных летательных аппаратов 2 позволяют относительно точно определить текущие координаты беспилотных летательных аппаратов 2 в пространстве. Пеленгаторы, которые размещают на беспилотных летательных аппаратах 2, передают информацию на средство 4 обработки и управления, размещенное на морской мишенной позиции 1. Это позволяет определить траекторию полета боеприпаса 5 и точку его падения по координатам точек пересечения линий пеленгов.
Таким образом, предложенный способ позволяет достичь требуемого технического результата, который заключается в расширении области применения способа с целью обеспечения возможности его использования для определения координат точек падения боеприпасов в процессе проведения испытаний при априорной оценке ошибок их доставки при стрельбе по морским целям.
Изобретение относится к области проведения испытаний огневых комплексов и может быть использовано для определения априорной точности их стрельбы с использованием морской мишенной позиции (ММП). Для определения точек падения боеприпасов используют пеленгаторы для измерения углов пеленга на летящий боеприпас в районе расчетной точки его падения. Определяют траекторию полета боеприпаса и точку его падения по координатам точек пересечения линий пеленгов. При этом пеленгаторы устанавливают на беспилотные летательные аппараты (2), которые перед расчетным временем доставки боеприпаса поднимают на кабелях-привязях (3) в разнесенные точки пространства над морской мишенной позицией (1), которую предварительно доставляют в район расчетной точки падения боеприпаса (5) и координаты которой уточняют с использованием глобальной навигационной системы. Результаты измерения углов пеленга на летящий боеприпас (5) в районе расчетной точки его падения от каждого из беспилотных летательных аппаратов (2) и определение траектории полета боеприпаса (5) и точки его падения по координатам точек пересечения линий пеленгов производят на средстве обработки и управления (4), размещенном на морской мишенной позиции (1), куда направляют результаты измерений по кабелям-привязям (3), которые используют для силового удержания беспилотных летательных аппаратов (2) и передачи на их борт управляющих сигналов. Обеспечивается определение координат точек падения боеприпасов в процессе проведения испытаний при априорной оценке ошибок их доставки при стрельбе по морским целям, включая низколетящие над морской поверхностью боеприпасы. 1 ил.
Способ определения точек падения боеприпасов, согласно которому используют пеленгаторы для измерения углов пеленга на летящий боеприпас в районе расчетной точки его падения и определяют траекторию полета боеприпаса и точку его падения по координатам точек пересечения линий пеленгов, отличающийся тем, что пеленгаторы устанавливают на беспилотные летательные аппараты, которые перед расчетным временем доставки боеприпаса поднимают на кабелях-привязях в разнесенные точки пространства над морской мишенной позицией, которую предварительно доставляют в район расчетной точки падения боеприпаса и координаты которой уточняют с использованием глобальной навигационной системы, при этом результаты измерения углов пеленга на летящий боеприпас в районе расчетной точки его падения от каждого из беспилотных летательных аппаратов и определение траектории полета боеприпаса и точки его падения по координатам точек пересечения линий пеленгов производят на средстве обработки и управления, размещенном на морской мишенной позиции, куда направляют результаты измерений по кабелям-привязям, которые используют для силового удержания беспилотных летательных аппаратов и передачи на их борт управляющих сигналов.
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ПАДЕНИЯ БОЕПРИПАСОВ | 2014 |
|
RU2593523C2 |
| Затвор для гидротехнических сооружений | 1933 |
|
SU35688A1 |
| Устройство для закрепления лыж на раме мотоциклов и велосипедов взамен переднего колеса | 1924 |
|
SU2015A1 |
| Изложница с суживающимся книзу сечением и с вертикально перемещающимся днищем | 1924 |
|
SU2012A1 |

