Изобретение относится к области радиолокации, в частности к обнаружению, определению местоположения и сопровождению малозаметного низколетящего над морской поверхностью (МП) со сверхзвуковой скоростью объекта.
Изобретение позволяет измерять расстояние от фронта следа на морской поверхности до полностью невидимого объекта, являющегося источником образования следа и летящего вблизи морской поверхности на скорости, приводящей к образованию ударных волн в окружающем пространстве. На момент обнаружения предполагается равномерное прямолинейное перемещение объекта над МП без изменения высоты полета со скоростью, превышающей 1,2 числа Маха.
Способ может быть осуществлен расположенным на судне (летательном аппарате) автономным радиолокатором в пределах радиогоризонта, а также с применением многопозиционной радиолокации.
В прототипе [1] определение координат сверхзвукового низколетящего объекта производится в том числе путем измерения расстояния от объекта до фронта его следа на морской поверхности. Возможность измерения расстояния строится на создании за объектом возмущения воздушного пространства (псевдозвуковой волны). В [1] предполагается, что при угле падения звуковой волны на МП более 12,7° звуковая волна отражается от границы сред (водной поверхности), в результате чего передача энергии значительно уменьшается. Однако энергия воздействия звуковой волны меньше энергии ударной волны. Следовательно, необходимое для образования радиолокационного контраста уменьшение высоты волн ряби морской поверхности в большей степени зависит от воздействия ударной волны, образованной пролетом над морской поверхностью объекта. Импульс давления (ударная волна) воздействует на рябь вне зависимости от угла падения, следовательно, нет надобности в измерении среднего уклона крупных волн.
Аналогом предложенного изобретения можно назвать способ [2], в котором измерение ширины следа производится на этапе его расширения. Это обстоятельство ограничивает применимость способа, так как требует очень высокую разрешающую способность радиолокатора. В способе [2] скорость перемещения воздействующей силы, образующей аномалию морской поверхности, соответствует скорости звука, которая меньше скорости ударной волны. Значительная ошибка в скорости воздействующей силы снижает точность измерения параметров движения объекта.
Способ измерения расстояния основан на наличии за объектом следа - протяженной аномалии МП, имеющей радиолокационный контраст относительно остальной МП.
Для осуществления способа требуется наличие «портретов» (базы данных классификационных признаков) известных сверхзвуковых низколетящих объектов: таблицы с данными величин интенсивностей ударных волн, скоростей ударных волн и расстояний от оси движения объекта до границы образованного ударной волной следа. Объектам, имеющим идентичный планер, двигатель и скорость, будет соответствовать одинаковый «портрет». Входными данными «портрета» являются различные классификационные признаки объекта, в том числе скорость движения объекта. Выводными данными «портрета» являются интенсивность и скорость ударной волны объекта.
При обнаружении следа по радиолокационной отметке фронта следа определяются дальность до фронта следа Дфр и пеленг на фронт следа Пфр. Фронт следа перемещается с такой же скоростью, что и объект. По перемещению радиолокационной отметки фронта следа определяется скорость движения объекта.
Курс движения объекта Коб определяется по пространственной ориентации следа, а не по направлению перемещения фронта следа, что повышает точность определения курса при использовании радиолокатора кругового обзора.
По пеленгу на фронт следа Пфр и курсу объекта Коб определяется курсовой угол с фронта следа на радиолокатор - βфр:
Курсовой угол с фронта следа на радиолокатор вычисляется в случае, если пеленг с радиолокатора на фронт следа больше курса объекта, как модуль разности, где уменьшаемое - пеленг с радиолокатора на фронт следа, вычитаемое - сумма курса фронта следа и 180 градусов, а в противном случае как модуль разности, где уменьшаемое - сумма пеленга с радиолокатора на фронт следа и 180 градусов, вычитаемое - курс фронта следа.
При радиолокационном зондировании МП методом стробирования снимаются значения измеренной ширины следа Визм, потом значения усредняются и рассчитывается значение ширины следа Bрасч:
 ;
;
где  - усредненная измеренная ширина следа.
- усредненная измеренная ширина следа.
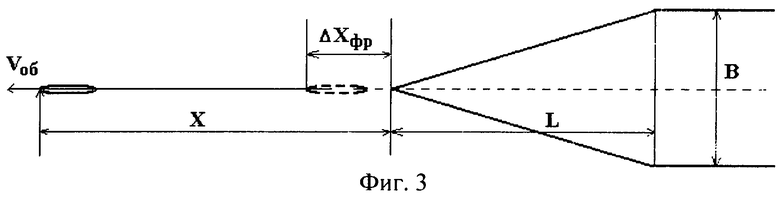
Объект будет находиться относительно фронта следа в направлении перемещения фронта впереди на расстоянии Х (см. фиг.1):
где h - высота полета объекта;
Vоб - скорость объекта;
νув - скорость ударной волны, образованной объектом;
ΔХфр - расстояние между объектом и фронтом следа, образованное инерцией реакции МП на воздействие ударной волны:
ΔXфр=Δtфр·Vоб.
Δtфр - время реакции МП на воздействие импульса давления (ударной волны) можно оценить примерно двумя периодами ряби:

где lp - радиус пространственной корреляции мелкоструктурных ветровых волн (ряби), для которых выполняется условие резонансного рассеяния электромагнитных волн длиной λ под углом скольжения ψ (условие Брегга):

Vвр - скорость распространения ряби на морской поверхности (то есть свободных поверхностных волн на глубокой воде) [3, с.155]:
где g - ускорение свободного падения, g≈9,8 м/с;
Λ - длина поверхностно-капиллярной волны (ряби), Λ≈2·lp [4];
z - нормированный на давление коэффициент поверхностного натяжения на границе сред воды и воздуха, z≈7·10-5 м3/c2.
Учет времени реакции МП на воздействие ударной волны приводит к преобразованию формулы расчета Х к виду:

При рассмотрении процесса образования аномалии МП, с точки зрения интересов радиолокационного зондирования МП, граница аномалии определяется границей радиолокационного контраста аномалии.
Радиолокационный контраст аномалии образуется за счет «контраста зон со сглаженным волнением по отношению к фону» [5, с.212]:
где hф и hc - высоты волн ряби у фона и аномалии соответственно.
Уменьшение высоты волн ряби вызвано воздействием ударной волны от сверхзвукового низколетящего объекта. Величина изменения высоты волн ряби Δhc=hф-hc зависит от интенсивности ударной волны.
При условии конического распространения фронта ударной волны [6] основные потери интенсивности приходятся на расширение фронта волны:
где Iк - интенсивность ударной волны при коническом распространении;
Iпл - интенсивность ударной волны в случае плоской волны;
Rк - радиус основания конуса;
hк - высота конуса.
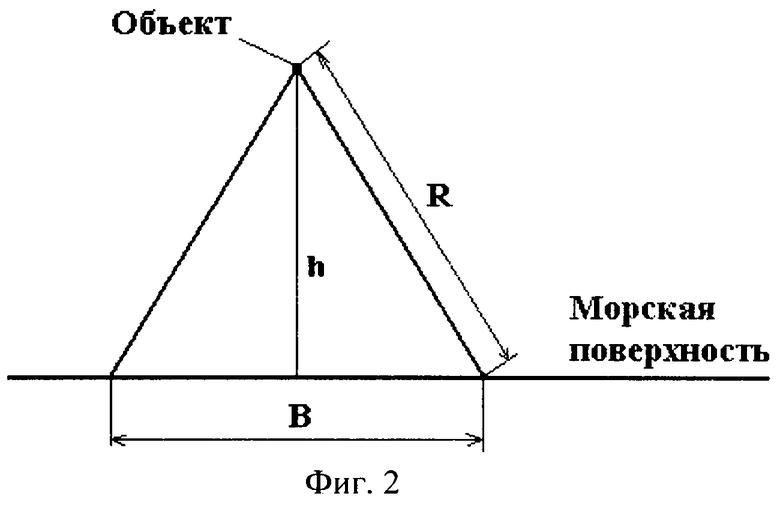
Существует расстояние Rк, при котором Iк будет недостаточно для образования контраста, необходимого для различения аномалии. Следовательно, расстояние R (см. фиг.2) - это радиус основания конуса Rк, соответствующий минимальному значению интенсивности ударной волны Iа, достигшей морской поверхности и вызвавшей различимую радиолокатором аномалию. Заменим пространственные величины конуса на пространственные параметры образования аномалии (см. фигуры 2, 3):
где Iоб - интенсивность ударной волны, формируемой объектом, приведенная к оси движения объекта (пересчитанная из данных замеров интенсивности ударной волны реального объекта в данные при условии точечного излучателя);
L - расстояние от фронта аэродинамической аномалии на морской поверхности до границы прекращения ее расширения:
«Ударная волна распространяется по невозмущенному веществу со сверхзвуковой скоростью, тем большей, чем больше интенсивность ударной волны» [6, с.778]. Поэтому скорость распространения ударной волны будет зависеть от расстояния между осью движения объекта и границей следа на МП - R (см. фиг.2).
Расстояние от оси движения объекта до границы образованного ударной волной следа рассчитывается по техническим параметрам полета объекта:
Ширина аномалии после прекращения расширения (максимально возможная ширина) вычисляется по теореме Пифагора из треугольника (см. фиг.2):
Следовательно,
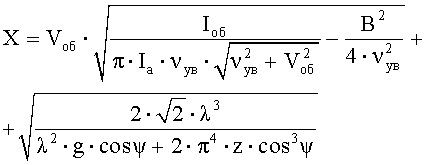
Проекция на морскую поверхность расстояния от объекта до фронта следа рассчитывается как произведение скорости полета объекта и суммы квадратных корней, первый квадратный корень - разность, где уменьшаемое отношение минимального значения интенсивности ударной волны, достигшей морской поверхности и вызвавшей различимую радиолокатором аномалию, к произведению числа пи, интенсивности ударной волны объекта, скорости ударной волны и корня квадратного из суммы квадратов скорости ударной волны и скорости полета объекта, а вычитаемое - это отношение квадрата произведения усредненной измеренной ширины следа и косинуса курсового угла с фронта следа на радиолокатор к произведению числа 4 и квадрата скорости ударной волны, второй квадратный корень - отношение произведения числа 2, корня квадратного из числа 2 и длины электромагнитной волны в третьей степени к сумме, где первое слагаемое - это произведение квадрата длины электромагнитной волны, ускорения свободного падения и косинуса угла скольжения электромагнитных волн, а второе слагаемое это удвоенное произведение числа пи в четвертой степени, нормированного на давление коэффициента поверхностного натяжения на границе сред воды и воздуха, а также косинуса угла скольжения в третьей степени.
Краткое описание чертежей:
Фигура 1. Схема взаимного расположения радиолокатора, объекта и следа: вид сверху на морскую поверхность.
Фигура 2. Схема взаимного расположения объекта и следа: вид с лобового ракурса на объект.
Фигура 3. Схема взаимного расположения объекта и следа: вид сверху на морскую поверхность. Пространственные параметры аномалии.
Осуществление:
Для осуществления способа требуется наличие «портретов» (базы данных классификационных признаков) известных сверхзвуковых низколетящих объектов: таблицы с данными величин интенсивностей ударных волн, скоростей ударных волн и расстояний от оси движения объекта до границы образованного ударной волной следа. Объектам, имеющим идентичный планер, двигатель и скорость, будет соответствовать одинаковый «портрет». Входными данными «портрета» являются различные классификационные признаки объекта, в том числе скорость движения объекта. Выводными данными «портрета» являются интенсивность и скорость ударной волны объекта.
После обнаружения радиолокатором следа объекта определяются дальность до фронта следа Дфр и пеленг на фронт следа Пфр, по местоположению фронта следа и пространственной ориентации следа определяется направление движения (курс) объекта Коб. По пеленгу на фронт следа Пфр и курсу объекта Коб определяется курсовой угол с фронта следа на радиолокатор - βфp:
Курсовой угол с фронта следа на радиолокатор вычисляется в случае, если пеленг с радиолокатора на фронт следа больше курса объекта, как модуль разности, где уменьшаемое - пеленг с радиолокатора на фронт следа, вычитаемое - сумма курса фронта следа и 180 градусов, а в противном случае, как модуль разности, где уменьшаемое - сумма пеленга с радиолокатора на фронт следа и 180 градусов, вычитаемое - курс фронта следа.
Из данных радиолокационного зондирования МП методом стробирования снимаются значения измеренной ширины следа Визм, потом значения усредняются.
По перемещению радиолокационной отметки фронта следа определяется скорость движения объекта.
По скорости движения объекта и другим классификационным признакам производится классификация объекта. Из таблицы выбираются интенсивность и скорость ударной волны, соответствующие классификации объекта.
По известной длине электромагнитной волны λ, излучаемой радиолокатором, и углу скольжения ψ при облучении МП радиолокатором определяется Ia - минимальное значение интенсивности ударной волны, достигшей морской поверхности и вызвавшей различимую радиолокатором аномалию.
По известной длине электромагнитной волны λ и углу скольжения ψ, выбранной по классификации интенсивности Iоб и скорости ударной волны νув, рассчитанной интенсивности Ia, измеренной скорости объекта Vоб и ширине следа  вычисляется расстояние X:
вычисляется расстояние X:
Проекция на морскую поверхность расстояния от объекта до фронта следа рассчитывается как произведение скорости полета объекта и суммы квадратных корней, первый квадратный корень - разность, где уменьшаемое отношение минимального значения интенсивности ударной волны, достигшей морской поверхности и вызвавшей различимую радиолокатором аномалию, к произведению числа пи, интенсивности ударной волны объекта, скорости ударной волны и корня квадратного из суммы квадратов скорости ударной волны и скорости полета объекта, а вычитаемое - это отношение квадрата произведения усредненной измеренной ширины следа и косинуса курсового угла с фронта следа на радиолокатор к произведению числа 4 и квадрата скорости ударной волны, второй квадратный корень - отношение произведения числа 2, корня квадратного из числа 2 и длины электромагнитной волны в третьей степени к сумме, где первое слагаемое - это произведение квадрата длины электромагнитной волны, ускорения свободного падения и косинуса угла скольжения электромагнитных волн, а второе слагаемое - это удвоенное произведение числа пи в четвертой степени, нормированного на давление коэффициента поверхностного натяжения на границе сред воды и воздуха, а также косинуса угла скольжения в третьей степени.
Источники информации
1. Джигимон А.Н., Стабровский В.Н., Худзик Т.А. Способ определения координат сверхзвукового низколетящего объекта по следу на морской поверхности. // Патент на изобретение №2419105. Заявка №2009133863 от 09.09.09 г. Зарегистрировано в Государственном реестре изобретений РФ 20.05.11 г. Опубликовано в бюллетене №14 от 20.05.11 г.
2. Джигимон А.Н., Стабровский В.Н., Худзик Т.А. Способ определения местоположения и параметров движения низколетящего над водной поверхностью со сверхзвуковой скоростью объекта по следу на водной поверхности. // Патент на изобретение №2388012. Заявка №2009103218 от 30.01.09 г. Зарегистрировано в Государственном реестре изобретений РФ 27.04.10 г. Опубликовано в бюллетене №12 от 27.04.10 г.
3. Океанология. Физика океана. Том 2. Гидродинамика океана. - М.: Наука, 1978. - 456 с.
4. Стокер Дж. Дж. Волны на воде. Математическая теория и приложения. / Пер. с англ. Под ред. Лаврентьева М.А. и Моисеева Н.Н. - М.: Изд-во иностранной литературы, 1959. - 620 с.
5. Ушаков И.Е., Шишкин И.Ф. Радиолокационное зондирование морской поверхности. - М.: РИЦ «Татьянин день», 1997. - 264 с.: ил.
6. Физический энциклопедический словарь. / Гл. ред. A.M.Прохоров. Ред. кол. Д.М.Алексеев, A.M.Бонч-Бруевич, А.С.Боровик-Романов и др. - М.: Сов. энциклопедия, 1984. - 944 с., ил., 2 л. цв. ил.
Использование: радиолокация, в частности обнаружение местоположения и сопровождение сверхзвукового малозаметного низколетящего над морской поверхностью объекта. Сущность: способ может быть осуществлен расположенным на судне или летательном аппарате автономным радиолокатором при полном отсутствии радиолокационного отражения от объекта, но при наличии следа (аномалии морской поверхности). После обнаружения следа радиолокационным способом определяются дальность до фронта следа и пеленг на фронт следа, производится измерение ширины следа способом радиолокационного стробирования по дальности. Курс движения объекта определяется пространственной ориентацией следа. Скорость объекта определяется по перемещению фронта следа. По классификационным признакам объекта определяется интенсивность и скорость ударной волны объекта. При известной длине излучаемой радиолокатором электромагнитной волны и углу скольжения при облучении морской поверхности радиолокатором по полученным параметрам вычисляется расстояние между объектом и фронтом его следа на морской поверхности. Технический результат: повышение точности и достоверности. 3 ил.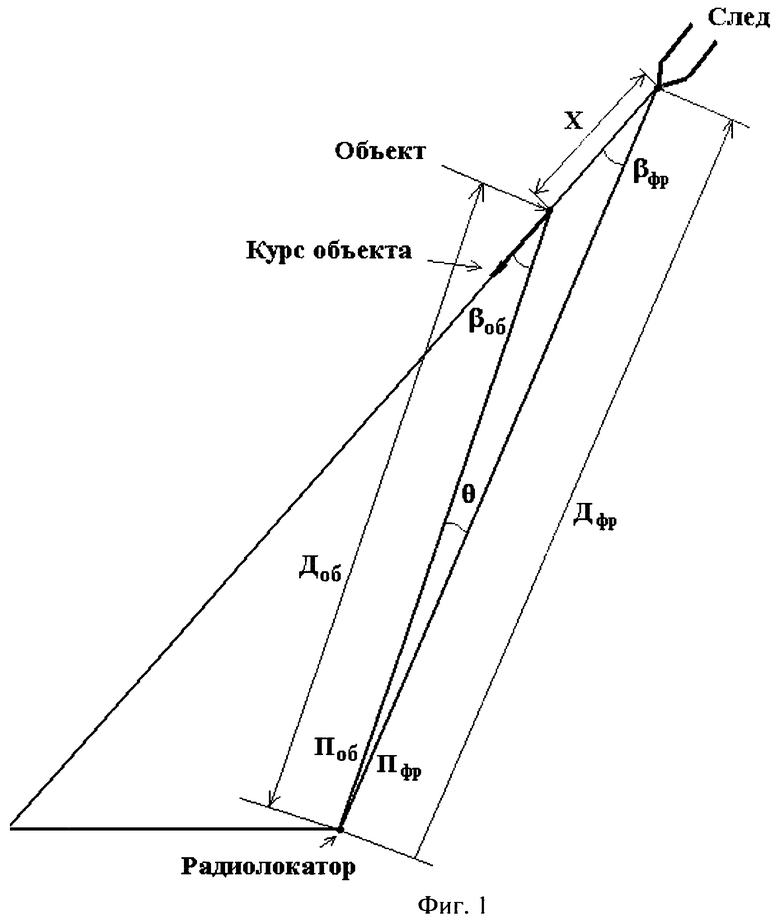
Способ измерения расстояния между сверхзвуковым низколетящим объектом и фронтом его радиолокационно наблюдаемого следа на морской поверхности, способный осуществляться как при наличии, так и при отсутствии радиолокационного отражения от самого объекта; производимый по аномалии морской поверхности (следу), скорость перемещения фронта и другие признаки которой позволяют классифицировать ее как след низколетящего над морской поверхностью объекта; осуществляемый расположенным на судне или летательном аппарате автономным радиолокатором в пределах радиогоризонта; в котором после обнаружения следа (аномалии морской поверхности) радиолокационным способом определяются дальность до фронта следа и пеленг на фронт следа, производится измерение ширины следа способом радиолокационного стробирования по дальности; скорость движения объекта определяется по перемещению радиолокационной отметки фронта следа; курс движения объекта определяется пространственной ориентацией следа; курсовой угол с фронта следа на радиолокатор вычисляется в случае, если пеленг с радиолокатора на фронт следа больше курса объекта, как модуль разности, где уменьшаемое - пеленг с радиолокатора на фронт следа, вычитаемое - сумма курса фронта следа и 180°, а в противном случае как модуль разности, где уменьшаемое - сумма пеленга с радиолокатора на фронт следа и 180°, вычитаемое - курс фронта следа; отличающийся тем, что для определения интенсивности и скорости ударной волны объекта используется база данных классификационных признаков существующих сверхзвуковых низколетящих объектов; по скорости движения объекта и другим классификационным признакам производится классификация объекта и выбор из базы данных интенсивности и скорости ударной волны объекта; по известной длине излучаемой радиолокатором электромагнитной волны и углу скольжения при облучении морской поверхности радиолокатором определяется минимальное значение интенсивности ударной волны, достигшей морской поверхности и вызвавшей различимую радиолокатором аномалию; расстояние от объекта до фронта следа рассчитывается как произведение скорости полета объекта и суммы квадратных корней, первый квадратный корень - разность, где уменьшаемое отношение минимального значения интенсивности ударной волны, достигшей морской поверхности и вызвавшей различимую радиолокатором аномалию, к произведению числа пи, интенсивности ударной волны объекта, скорости ударной волны и корня квадратного из суммы квадратов скорости ударной волны и скорости полета объекта, а вычитаемое - это отношение квадрата произведения усредненной измеренной ширины следа и косинуса курсового угла с фронта следа на радиолокатор к произведению числа 4 и квадрата скорости ударной волны, второй квадратный корень - отношение произведения числа 2, корня квадратного из числа 2 и длины электромагнитной волны в третьей степени к сумме, где первое слагаемое - это произведение квадрата длины электромагнитной волны, ускорения свободного падения и косинуса угла скольжения электромагнитных волн, а второе слагаемое - это удвоенное произведение числа пи в четвертой степени, нормированного на давление коэффициента поверхностного натяжения на границе сред воды и воздуха, а также косинуса угла скольжения в третьей степени.
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ СВЕРХЗВУКОВОГО НИЗКОЛЕТЯЩЕГО ОБЪЕКТА ПО СЛЕДУ НА МОРСКОЙ ПОВЕРХНОСТИ | 2009 |
|
RU2419105C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ И ПАРАМЕТРОВ ДВИЖЕНИЯ НИЗКОЛЕТЯЩЕГО НАД ВОДНОЙ ПОВЕРХНОСТЬЮ СО СВЕРХЗВУКОВОЙ СКОРОСТЬЮ ОБЪЕКТА ПО СЛЕДУ НА ВОДНОЙ ПОВЕРХНОСТИ | 2009 |
|
RU2388012C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ТРАЕКТОРИИ И СКОРОСТИ ОБЪЕКТА | 2009 |
|
RU2416103C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ И ПАРАМЕТРОВ ДВИЖЕНИЯ НИЗКОЛЕТЯЩЕГО НАД МОРСКОЙ ПОВЕРХНОСТЬЮ СО СВЕРХЗВУКОВОЙ СКОРОСТЬЮ ОБЪЕКТА ПО ШИРИНЕ СЛЕДА НА МОРСКОЙ ПОВЕРХНОСТИ | 2009 |
|
RU2396575C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ СКОРОСТИ СВЕРХЗВУКОВОГО НИЗКОЛЕТЯЩЕГО ОБЪЕКТА ПО СЛЕДУ НА МОРСКОЙ ПОВЕРХНОСТИ ПРИ СБЛИЖЕНИИ ДЛЯ ВСТРЕЧИ С ОБЪЕКТОМ | 2009 |
|
RU2419108C1 |
| US 4114135 A, 12.09.1978 | |||
| Устройство для сшивания костно-хрящевой ткани | 1971 |
|
SU631152A1 |

