Изобретение относится к области радиолокации, в частности к определению скорости движения малозаметного низколетящего над морской поверхностью (МП) со сверхзвуковой скоростью объекта в случае сближения морского подвижного носителя радиолокатора и объекта в «точку» встречи.
Изобретение позволяет определять скорость даже полностью невидимого объекта, летящего вблизи МП и создающего за собой возмущения воздушного пространства (псевдозвуковую волну). На момент обнаружения предполагается равномерное прямолинейное перемещение объекта над МП без изменения высоты полета со скоростью, превышающей 1,2 Маха.
Способ может быть осуществлен расположенным на судне автономным радиолокатором в пределах радиогоризонта.
Прототип [1] относится к радиолокации и может быть использован при применении картографических радиолокаторов с синтезированной апертурой антенны (РСА). Целью прототипа является повышение достоверности определения вектора скорости надводного корабля. Способ прототипа заключается в формировании с помощью РСА в режиме картографирования радиолокационного изображения (РЛИ) участка водной поверхности с движущимся объектом, измерении на РЛИ смещения по продольной координате изображения корабля относительно начала изображения его корабельного следа, измерении угла между продольной координатой РЛИ и касательной к началу оси изображения корабельного следа и вычислении модуля вектора скорости корабля по формуле. В качестве касательной к началу оси изображения корабельного следа используют касательную к началу изображения кильватерного следа корабля, биссектрису угла между касательными к началам изображений расходящихся ветвей огибающей Кельвиновских волн.
Однако в прототипе объектом измерения скорости является надводный корабль, имеющий кильватерный след и радиолокационно наблюдаемые расходящиеся ветви огибающей Кельвиновских волн. Прототип предназначен для повышения достоверности определения вектора скорости, а не самостоятельного определения скорости. При условии сверхзвуковой скорости объекта имеется необходимость определения скорости объекта на первом обзоре радиолокатора, что исключает применение картографических радиолокаторов.
Аналогом предложенного изобретения можно назвать способ лазерной локации [2], использующий дополнительные к основному отражению от объекта отражения от водной поверхности для уточнения скорости объекта. Однако этот способ использует немодулированное излучение одночастотного лазера непрерывного действия, что в радиолокации ведет к неэффективному использованию потенциала радиолокатора.
Способ определения скорости объекта основан на наличии за объектом следа - протяженной аномалии МП, имеющей радиолокационный контраст относительно остальной МП.
При обнаружении следа определяется дальность до фронта следа Дфр, пеленг на фронт следа Пфр, по пространственной ориентации следа определяется курс движения объекта Коб. По пеленгу на фронт следа Пфр и курсу объекта Коб определяется курсовой угол с фронта следа на радиолокатор - βфр:

По курсу движения объекта Коб и по курсу движения носителя радиолокатора определяется угол сближения радиолокатора и объекта α:

Тогда по теореме синусов из треугольника с вершинами «фронт следа», «радиолокатор», «точка сближения» (см. схему) приближенная скорость объекта (она больше фактической на величину, пропорциональную расстоянию между объектом и фронтом следа) равна:
 ;
;
где Vp - скорость движения носителя радиолокатора.
В результате радиолокационного зондирования МП методом стробирования снимаются значения измеренной ширины следа Визм, потом значения усредняются, и рассчитывается значение ширины следа Врасч:
 .
.
Объект будет находиться относительно фронта следа в направлении перемещения фронта впереди на расстоянии Х (см. схему):
 ;
;
где 12,7° - угол падения звуковой волны на МП, при котором звуковая волна отражается от границы сред (водной поверхности), в результате чего передача энергии значительно уменьшается [3];
 - средний уклон крупных волн МП, для определения среднего уклона крупных волн МП используется отношение интенсивностей обратного рассеяния электромагнитной энергии при двух углах скольжения, не превышающих среднего уклона взволнованной поверхности [4];
- средний уклон крупных волн МП, для определения среднего уклона крупных волн МП используется отношение интенсивностей обратного рассеяния электромагнитной энергии при двух углах скольжения, не превышающих среднего уклона взволнованной поверхности [4];
Vоб - скорость объекта (на начальном этапе расчетов принимается равной приближенному значению -  );
);
νзв - скорость звука в пространстве между объектом и МП, которая может быть рассчитана  (Т - температура воздушного пространства между объектом и МП, К);
(Т - температура воздушного пространства между объектом и МП, К);
ΔX - расстояние между объектом и фронтом следа, образованное инерцией реакции МП на воздействие псевдозвуковой волны:
ΔXфр=Δtфр·Vоб.
Δtфр - время реакции МП на воздействие псевдозвуковой волны:
 ,
,
где Vпв - скорость распространения поверхностных волн, примерно равна трети скорости установившегося ветра;
lp - радиус пространственной корреляции мелкоструктурных ветровых волн (ряби), для которых выполняется условие резонансного рассеяния электромагнитных волн длиной λ под углом скольжения ψ (условие Брегга):
 .
.
Учет времени реакции МП на псевдозвуковое воздействие приводит к преобразованию формулы расчета Х к виду:
 .
.
По теореме косинусов из треугольника со сторонами Доб, Дфр, Х (см. схему) дальность до объекта вычисляется по формуле:
 .
.
По теореме синусов из треугольника со сторонами Доб, Дфр, Х (см. схему) разница пеленгов на фронт следа и на объект:
 .
.
Из уравнения свойств углов:
βоб=βфр+θ.
Тогда, курсовой угол на радиолокатор относительно объекта выражается через уже известные величины:
 .
.
Приближенное значение скорости объекта  позволило рассчитать курсовой угол на радиолокатор относительно объекта. Теперь через курсовой угол на радиолокатор относительно объекта рассчитывается скорость объекта:
позволило рассчитать курсовой угол на радиолокатор относительно объекта. Теперь через курсовой угол на радиолокатор относительно объекта рассчитывается скорость объекта:
 .
.
По известной длине электромагнитной волны λ, излучаемой радиолокатором, и углу скольжения ψ при облучении МП радиолокатором вычисляется промежуточное значение a:
 .
.
По промежуточному значению a и известным величинам вычисляется промежуточное значение b:
 .
.
По промежуточному значению b вычисляется скорость объекта:
 .
.
Осуществление:
До обнаружения следа сверхзвукового низколетящего объекта производится определение среднего уклона крупных волн МП -  . Для определения среднего уклона крупных волн МП используется отношение интенсивностей обратного рассеяния электромагнитной энергии при двух углах скольжения, не превышающих среднего уклона взволнованной поверхности.
. Для определения среднего уклона крупных волн МП используется отношение интенсивностей обратного рассеяния электромагнитной энергии при двух углах скольжения, не превышающих среднего уклона взволнованной поверхности.
Вычисляется скорость распространения звука в воздушном пространстве между объектом и МП:
 ,
,
где Т - температура воздушного пространства между объектом и МП, К.
Значение скорости распространения поверхностных волн Vпв определяется приближенно как треть скорости установившегося ветра.
После обнаружения радиолокатором следа объекта определяются дальность до фронта следа Дфр и пеленг на фронт следа Пфр, по местоположению фронта следа и пространственной ориентации следа определяется направление движения (курс) объекта Коб. По пеленгу на фронт следа Пфр и курсу объекта Коб определяется курсовой угол с фронта следа на радиолокатор - βфр:

По курсу движения объекта Коб и по известному курсу движения носителя радиолокатора Кр определяется угол сближения радиолокатора и объекта α:

Из данных радиолокационного зондирования МП методом стробирования снимаются значения измеренной ширины следа Визм, потом значения усредняются.
По известной длине электромагнитной волны λ, излучаемой радиолокатором, и углу скольжения ψ при облучении МП радиолокатором вычисляется промежуточное значение a:
 .
.
По промежуточному значению а и известным величинам вычисляется промежуточное значение b:
 .
.
По промежуточному значению b вычисляется скорость объекта:
 .
.
Источники информации
1. Рыбаков И.В. Способ определения скорости объекта по радиолокационному изображению в радиолокаторе с синтезированной апертурой антенны. Патент на изобретение №94021083 от 20.04.96 г.
2. Меньших О.Ф. Способ локации. Патент РФ №2296350, 2007.
3. Долгих В.Н., Казанцев Г.И. Прикладная гидрофизика. Часть 1. Гидроакустика: учебник. - Владивосток, ТОВМИ им. С.О.Макарова, 2005, - 488 с.: ил.
4. Ушаков И.Е., Шишкин И.Ф. Радиолокационное зондирование морской поверхности. - М.: РИЦ «Татьянин день», 1997. - 264 с.: ил.
Изобретение относится к области радиолокации, в частности к определению скорости движения и сопровождению сверхзвукового малозаметного низколетящего над морской поверхностью (МП) объекта в случае сближения морского подвижного носителя радиолокатора и объекта в «точку» встречи. Техническим результатом изобретения является расширение функциональных возможностей. Способ может быть осуществлен расположенным на судне автономным радиолокатором при полном отсутствии радиолокационного отражения от объекта, но при наличии следа - аномалии МП (АМП). До обнаружения следа производится определение среднего уклона крупных волн МП ( ), скорости распространения поверхностных (ветровых) волн МП (Vпв), скорости распространения звуковых волн над МП (νзв). После обнаружения следа радиолокационным способом определяются дальность до фронта следа Дфр и пеленг на фронт следа Пфр, производится измерение ширины следа Визм способом радиолокационного стробирования по дальности. Курс движения объекта Коб определяется пространственной ориентацией следа. По Коб и Пфр вычисляется курсовой угол с фронта следа на радиолокатор - βфр. По Коб и по курсу движения носителя радиолокатора Кр вычисляется угол сближения радиолокатора и объекта α. По длине электромагнитной волны λ радиолокатора и углу скольжения ψ при облучении МП через промежуточные значения вычисляется скорость объекта. 1 ил.
), скорости распространения поверхностных (ветровых) волн МП (Vпв), скорости распространения звуковых волн над МП (νзв). После обнаружения следа радиолокационным способом определяются дальность до фронта следа Дфр и пеленг на фронт следа Пфр, производится измерение ширины следа Визм способом радиолокационного стробирования по дальности. Курс движения объекта Коб определяется пространственной ориентацией следа. По Коб и Пфр вычисляется курсовой угол с фронта следа на радиолокатор - βфр. По Коб и по курсу движения носителя радиолокатора Кр вычисляется угол сближения радиолокатора и объекта α. По длине электромагнитной волны λ радиолокатора и углу скольжения ψ при облучении МП через промежуточные значения вычисляется скорость объекта. 1 ил.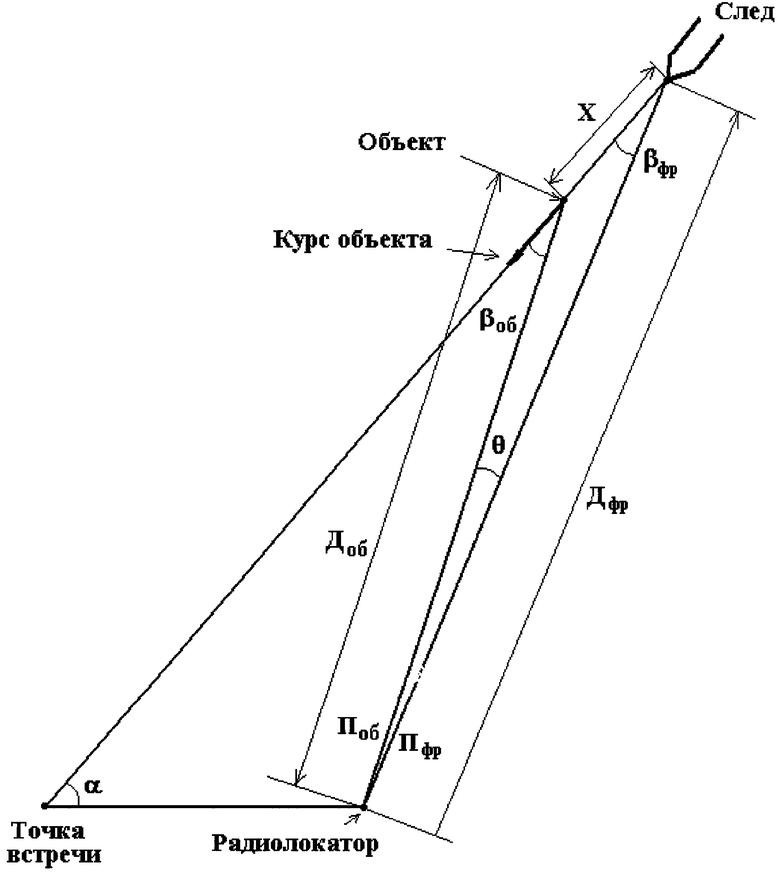
Способ определения скорости движения сверхзвукового низколетящего над морской поверхностью (МП) объекта по радиолокационно наблюдаемому следу на МП, способный осуществляться как при наличии, так и при отсутствии радиолокационного отражения от самого объекта; производимый по аномалии морской поверхности (АМП), скорость перемещения фронта и другие признаки которой позволяют классифицировать ее как след низколетящего над МП объекта; осуществляемый расположенным на судне автономным радиолокатором в пределах радиогоризонта; применимый для частного случая сближения носителя радиолокатора для встречи с объектом, отличающийся тем, что до обнаружения следа (АМП) производится определение среднего уклона крупных волн МП, скорости распространения поверхностных (ветровых) волн МП, скорости распространения звуковых волн над МП; после обнаружения следа (АМП) радиолокационным способом определяются дальность до фронта следа и пеленг на фронт следа, производится измерение ширины следа способом радиолокационного стробирования по дальности; курс движения объекта определяется пространственной ориентацией следа; курсовой угол с фронта следа на радиолокатор вычисляется в случае, если пеленг с радиолокатора на фронт следа больше курса объекта, как модуль разности, где уменьшаемое - пеленг с радиолокатора на фронт следа, вычитаемое - сумма курса фронта следа и 180°, а в противном случае как модуль разности, где уменьшаемое - сумма пеленга с радиолокатора на фронт следа и 180 градусов, вычитаемое - курс фронта следа; по курсу движения объекта и курсу движения носителя радиолокатора вычисляется угол сближения радиолокатора и объекта в случае, если модуль разности курса объекта и курса носителя радиолокатора меньше или равен 180° как модуль разности курса объекта и курса носителя радиолокатора, в противном случае при превышении курса носителя радиолокатора над курсом объекта как модуль разности, где уменьшаемое - сумма курса объекта и 360°, вычитаемое - курс носителя радиолокатора, при превышении курса объекта над курсом носителя радиолокатора как модуль разности, где уменьшаемое - курс объекта, вычитаемое - сумма курса носителя радиолокатора и 360°; по длине излучаемой радиолокатором электромагнитной волны и углу скольжения при облучении МП радиолокатором вычисляется первое промежуточное значение как сумма двух отношений, в первом отношении числитель - произведение усредненной измеренной ширины следа, косинуса курсового угла с фронта следа на радиолокатор, котангенса суммы 12,7° и среднего уклона крупных волн МП, знаменатель - удвоенная скорость звука над МП, во втором отношении числитель - произведение корня квадратного из 2 и длины волны радиолокатора, знаменатель - произведение величины π, скорости распространения поверхностных волн и косинуса угла скольжения при облучении МП радиолокатором; по первому промежуточному значению вычисляется второе промежуточное значение как отношение синуса курсового угла с фронта следа на радиолокатор к корню квадратному суммы трех слагаемых, первое слагаемое - квадрат отношения, где в числителе - произведение дальности до фронта следа и синуса курсового угла с фронта следа на радиолокатор, в знаменателе - произведение скорости движения носителя радиолокатора, первого промежуточного значения и синуса суммы величины π, отрицательного курсового угла с фронта следа на радиолокатор, отрицательного угла сближения радиолокатора и объекта, второе слагаемое - отрицательное удвоенное отношение, где в числителе - произведение дальности до фронта следа, синуса курсового угла с фронта следа на радиолокатор и косинуса курсового угла с фронта следа на радиолокатор, в знаменателе - произведение скорости движения носителя радиолокатора, первого промежуточного значения и синуса суммы величины π, отрицательного курсового угла с фронта следа на радиолокатор, отрицательного угла сближения радиолокатора и объекта, третье слагаемое - единица; скорость объекта вычисляется по второму промежуточному значению как произведение скорости движения носителя радиолокатора и отношения, где в числителе синус суммы величины π, отрицательного курсового угла с фронта следа на радиолокатор, отрицательного угла сближения радиолокатора и объекта, отрицательного арксинуса второй промежуточной величины, в знаменателе - синус суммы курсового угла с фронта следа на радиолокатор и арксинуса второй промежуточной величины.
| УСТРОЙСТВО ДЛЯ ОБНАРУЖЕНИЯ И ОПРЕДЕЛЕНИЯ СКОРОСТИ ПОДВИЖНОГО ОБЪЕКТА | 1994 |
|
RU2082172C1 |
| СПОСОБ ЛОКАЦИИ | 2005 |
|
RU2296350C1 |
| КОРАБЕЛЬНАЯ ТРЕХКООРДИНАТНАЯ РАДИОЛОКАЦИОННАЯ СТАНЦИЯ И АНТЕННОЕ УСТРОЙСТВО ДЛЯ НЕЕ | 2003 |
|
RU2254593C1 |
| JP 11202047 А, 30.07.1999 | |||
| US 5331326 А, 19.07.1994. | |||

