9
.
1)авен полусумме потенциалов на край- Htix электродах, то есть равен нулю. При наклоне преобразователя изменяется потенциал центрального электрода,, который может быть как положительным, так и отрицательным, С электронного блока в коррекционную обмотку 8 поступают положительные или отрицательные импульсы, В результате взаимодей ствия импульсного направленного поля
обмотки 8 и постоянного поля магнита 5 маятник 4 стремится повернуться по направлению результирующего вектора. Воздушный пузырек ЖМП 7 занимает среднее положение между крайними электродами. Выполнение датчика 9 угла в виде магнитомодуляционного преобразователя углового перемещения постоянного магнита 5 однозначно определяет положение маятника 4. 1 з.п. ф-лы, 3 ил.

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для измерения зенитного угла искривления скважины | 2018 |
|
RU2692365C1 |
| Преобразователь наклона скважины и поворота скважинного снаряда | 1983 |
|
SU1125364A1 |
| БЛОК ИНКЛИНОМЕТРИЧЕСКИХ ПРЕОБРАЗОВАТЕЛЕЙ | 2007 |
|
RU2359121C1 |
| Преобразователь зенитного угла | 1981 |
|
SU1002548A1 |
| Преобразователь зенитного угла | 1987 |
|
SU1452952A1 |
| Инклинометр | 1976 |
|
SU868056A1 |
| Датчик угла наклона объекта | 1990 |
|
SU1747872A1 |
| Устройство для ориентирования датчиков в скважине | 1983 |
|
SU1137190A1 |
| Гироскопический инклинометр | 1988 |
|
SU1548423A1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ЗЕНИТНЫХ И АЗИМУТАЛЬНЫХ УГЛОВ СКВАЖИН | 2011 |
|
RU2459951C1 |
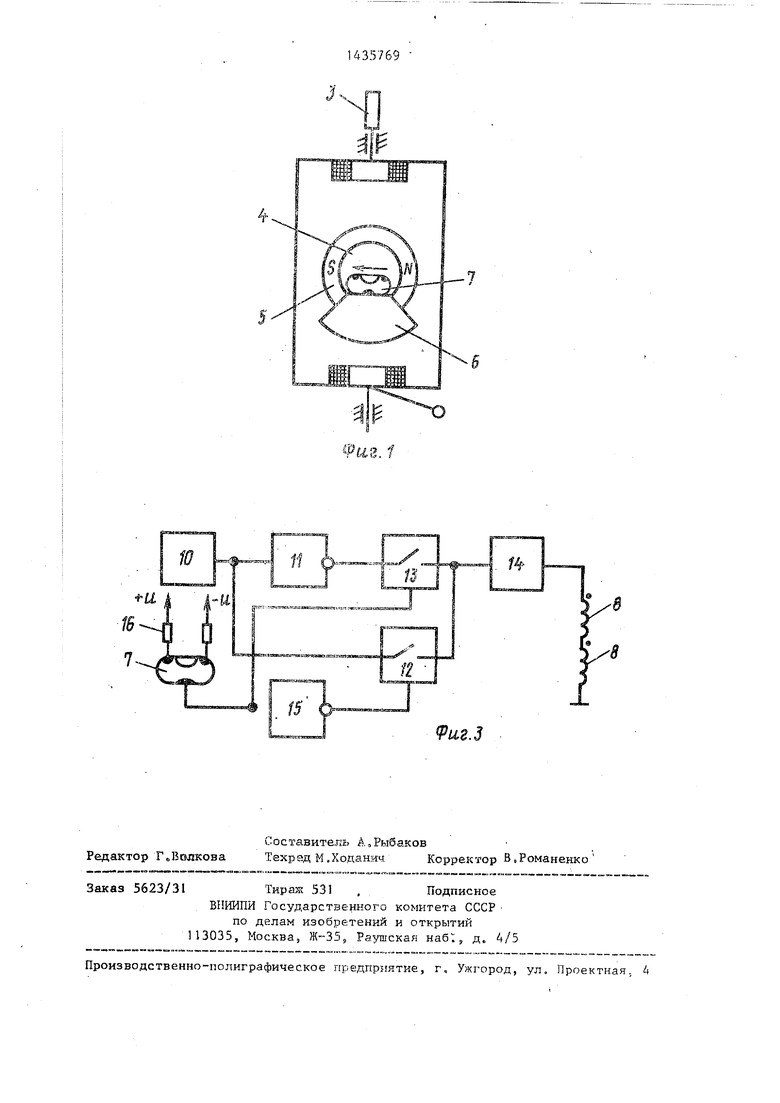
Изобретение относится к области бурения и может быть использовано для определения пространственного положения траектории скважины. Цель изобретения - повьяпение точности измерения зенитного угла. Преобразователь зенитного угла содержит рамку 1 с эксцентричным грузом 2, токосъем 3, маятник 4 с установленным на нем постоянным магнитом 5 радиального намагничивания, грузом 6 и жидкостным маятниковым переключателем (ЖМП) 7. На рамке 1 установленьт две. секции коррекциойной обмотки 8, соединенные последовательно. Вдоль оси маятника 4 расположен магнитомодуляционный датчик 9 угла. Датчик 9 и ЙМП 7 угла с помощью токосъема 3 электрически связаны- с электронным блоком, включающим генератор, два инвертора, два ключа и усилитель. При вертикальности оси маятника 4 воздушный пузырек ЖМП 7 находится в среднем положении. Потенциал на его центральном электроде (Л
Изобретение относится к 6, рению промысловых и геологоразведочных сква син и может быть использовано в составе инкл шометрической аппаратзфы при определении простррчственного положе- т-1Я траектории скважины
Целью изобретения является повьше mie точности измерения зенитного угла
На фиг.о1 изображена кинематическая схема преобразователя зенитного зтла, вид спереди на фиг.2 - то же,, вид сбоку; на фиг.З - структурная схема электронного блока преобразователя.
Преобразователь содержит рамку с эксцентричным грузом 3.5 на оси которой установлен токосъем 3, маятксик 4 с установленными на нач постоян}п.м магнитом 5 радиального намагничивани -которьй расположен в маятнике 4 с возможностью установки его оси намаг- 1-шчивания перпендикулярно оси вращения рамки 1 при вертикальном положе- .НИИ преобразователя, грузом 6, жидкостным маятниковым переключателем (ЖМП) 7, укрепленным на маятнике 4 перпендикулярно оси его вращения На рамке 1 вдоль продольной оси установлены две секции коррекцнонной обмотки 8, соединенные после,цоЕа тел ьно, а вдоль оси маятника 4 магнитомодуляци- онный датчик 9 угла реагир-умщий на угловые повороты постоянного магнита 5. ЖМП 7 и датчик 9 угла с помощью токосъема 3 электрически связаны с электронным блоком в котором генератор 10 прямоугольных импульсов подключен к входу первого инвертора 11 и первого ключа 12, выход первого инвертора 1 подключен к входу второго клю
0
s
0
5
0
ча 13, выходы ключей 12 и 13 подключены к входу усилителя 14, выход которого соединен с выводом коррекцион- ной обмотки В, другой вьтод коррек- ционной обмотки 8 заземлен, управляющий вход ключа 12 подключен к выходу второго инвертора 15, а управляющий вход ключа 13 - к входу второго инвертора 15 и к центральному электроду ЖМП 7, два крайних электрода которого подключены к плюсу и минусу напряжения питания через резисторы 16.
Преобразователь работает следующим образом,
Когда ось маятника 4 вертикальна, воздушный пузырек ЖМП 7 находится в среднем положении (фиг,1) и потенциал на его центральном электроде будет равен полусумме потенциалов на крайних электродах, т.е. нулю. При этом на выходе второго инвертора 15 будет также нулевой сигнал и ключи 12 и 13 При нулевом управляющем сигнале будут закрыты. При наклоне преобразователя на некоторый угол рамка 1 под действием момента эксцентричного груза 2 поворачивается до совпадения плоскости вращения маятника 4 с апсидальной плоскостью, маятник 4 отклоняется и под действием груза 6 стремится разверзнуться по вектору ускорения свободного падения. Наличие сухого трения в опорах маятника 4 препятствует этому. При этом смещение воздушного пузырька МЖ 7 приводит к изменению потенциала третьего (среднего) электрода, по положительному значению которого открьшается второй ключ 13 и через инвертор 15
закрывается первый ключ 12, а по отрицательному значению потенциала наоборот. На входы ключей 12 и 13 поступают прямоугольные импульсы положительной полярности с выхода ГПИ 10 и отрицательной с выхода инвертора II, Следовательно, в кор рекционную обмотку 8 через усилитель 14 поступают положительные или отрицательные импульсы в зависимости от состояния ключей 12 и 13, Коррекционная обмот- . ка 8 установлена в рамке так, чтобы наводимое в ней импульсное электромагнитное поле пронизывало постойн- ный магнит 5 маятника 4 в продольном направлении рамки 1. В результате взаимодействия, импульсного направленного поля корр ционной обмотки 8 и постоянного 71РЛЯ магнита 5 маятник 4 стремится повернуться по направлению результирующего вектора до положения маятника 4, в котором воздушный пузырек ЖМП 7 занимает среднее
Формула изобретения 1, Преобразователь зенитного угла, содержащий рамку с эксцентричным гру е ЗОН, маятник с взаимно перпендикулярными осями вращения, жидкостньй маятниковый переключатель, установленный на маятнике, токосъем, датчик угла, источник питания, отличающий10 с я тем, что, с целью повышения точности, он снабжен цилиндрическим пос- - тоянным магнитом радиального намагничивания, -неподвижно закрепленным на маятнике, коррекционной обмоткой, ус15 тановленной на рамке по оси ее вращения, генератором прямоугольных импульсов, первым и вторьм инверторами, первым и вторым ключами и усилителем, причем выход генератора прямоуголь20 ных импульсов подключен к входу первого ключа и через первый инвертор к входу второго ключа, выходы первого и второго.ключей соединены с входом усилителя, -выход которого заземлен
положение между крайними электродами; 25 через коррекционную обмотку, при этом
данное положение маятника 4 является наиболее устойчивым. Вьшолнение датчика 9 угла в виде магнитомодуляциан- ного преобразователя углового перемещения постоянного магнита 5 нозначно определяет положение маятника 4.
од-1
Известные меры по уменьшению момента трения в опорах маятников для ин- jg клинометрических преобразователей зенитного угла: применение прецизионных подшипников качения, разгрузка опор поплавками-маятниками в жидкости
и др позволяют достичь порога чувст- 40 вертикальном положении преобразова- вительности не менее 20 угл.мин, теля.
Формула изобретения 1, Преобразователь зенитного угла, содержащий рамку с эксцентричным гру ЗОН, маятник с взаимно перпендикулярными осями вращения, жидкостньй маятниковый переключатель, установленный на маятнике, токосъем, датчик угла, источник питания, отличающийс я тем, что, с целью повышения точности, он снабжен цилиндрическим пос- тоянным магнитом радиального намагничивания, -неподвижно закрепленным на маятнике, коррекционной обмоткой, установленной на рамке по оси ее вращения, генератором прямоугольных импульсов, первым и вторьм инверторами, первым и вторым ключами и усилителем, причем выход генератора прямоугольных импульсов подключен к входу первого ключа и через первый инвертор к входу второго ключа, выходы первого и второго.ключей соединены с входом усилителя, -выход которого заземлен
через коррекционную обмотку, при этом
jg
первый и второй электроды жидкостного маятникового переключателя соединены через резисторы соответственно с плюсом и минусом источника питания, тре- 30 тий электрод подключен к управляющему входу второго ключа и через второй инвертор к управляющему входу первого ключа,
ag.J
| Преобразователь зенитного угла | 1981 |
|
SU1002548A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
