Способ ранжирования воздушных целей
Изобретение относится к системам автоматизации процессов сопровождения воздушных целей (ВЦ) различного назначения и может быть применено на пунктах управления авиационных частей и подразделений.
Известен способ ранжирования целей на основе определения координат и ранжировании по минимуму
где Дj, Vсбj - соответственно дальность до j-й ( - номер цели) сопровождаемой цели и скорость сближения с ней.
- номер цели) сопровождаемой цели и скорость сближения с ней.
Недостатком данного способа ранжирования является низкая достоверность определения опасной цели, обусловленная отсутствием возможности определения вероятной атаки прикрываемых объектов и оценки возможного причиненного ущерба.
Технический результат предлагаемого способа заключается в повышении достоверности ранжирования ВЦ за счет определения вероятностей возможной атаки прикрываемых объектов обороны и степени их важности.
Указанный технический результат достигается тем, что в известном способе ранжирования воздушных целей после измерения координат ВЦ дополнительно определяют тип (класс) ВЦ и тип ее авиационных средств поражения (АСП), рассчитывают зону применения АСП по прикрываемым объектам обороны и зону достижимости ВЦ, вычисляют площадь пересечения зоны применения АСП и зоны достижимости ВЦ по топливу, определяют вероятность возможной атаки прикрываемых объектов.
Сущность изобретения заключается в том, что дополнительно определяют тип (класс) ВЦ, тип ее АСП, рассчитывают зону применения
АСП по прикрываемым объектам обороны и зону достижимости ВЦ, вычисляют площадь пересечения зоны применения АСП и зоны достижимости ВЦ по топливу, определяют вероятность возможной атаки прикрываемых объектов и ранжируют ВЦ.
Определение типа (класса) ВЦ может осуществляется за счет средств радиотехнической разведки (РТР) (см., например, Мельников Ю.П. Воздушная радиотехническая разведка (методы оценки эффективности). - М.: Радиотехника, 2005. - 304 с., С 124-136) и радиолокационных станций (РЛС) (см., например, Справочник по радиолокации, под редакцией М.И. Скольника. - М.: Техносфера, 2014. - 672 с. С 247-268). Обладая информацией о типе (классе) ВЦ и координатах аэродромов противника, можно оценить рубежи достижимости таких целей по топливу. Дополнительно по типу цели оценивается состав АСП, потенциально возможный наносимый ущерб обнаруженным ВЦ и рубежи применения оружия по ним. При этом, чем больше у обнаруженных ВЦ практический радиус действия и дальность применения АСП, тем они опаснее.
Известно, что рубеж достижимости воздушного судна (ВС) определяются запасом топлива на его борту и имеет форму эллипса (см., например, Андреевский В.В., Горощенко Л.Б. Управление полетом и эффективность авиационного комплекса. М.: Машиностроение, 1974. - С 24-37). Также известна номенклатура АСП противника пригодная для каждого класса ВС, что в свою очередь позволяет найти зону возможного применения АСП вокруг важных объектов обороны (см., например, Халимов Н.Р. Определение наиболее вероятных объектов атаки в АСУ при отражении воздушного налета. Сборник материалов международной военно-научной конференции «Основные направления адаптации объединенной системы ПВО государств - участников СНГ к решению задач воздушно-космической обороны». Секция №5 «Проблемы создания и перспективы развития АСУ войсками (силами) и подсистемами связи Объединенной системы ПВО государств - участников СНГ». - Тверь: ВА ВКО. - 2016. 231 с. С 216-220).
На основе анализа площадей пересечения рубежей достижимости ВЦ по топливу и зон возможного применения АСП вокруг прикрываемых объектов можно выявить наиболее вероятные объекты для атаки и объекты, находящиеся вне зон поражения.
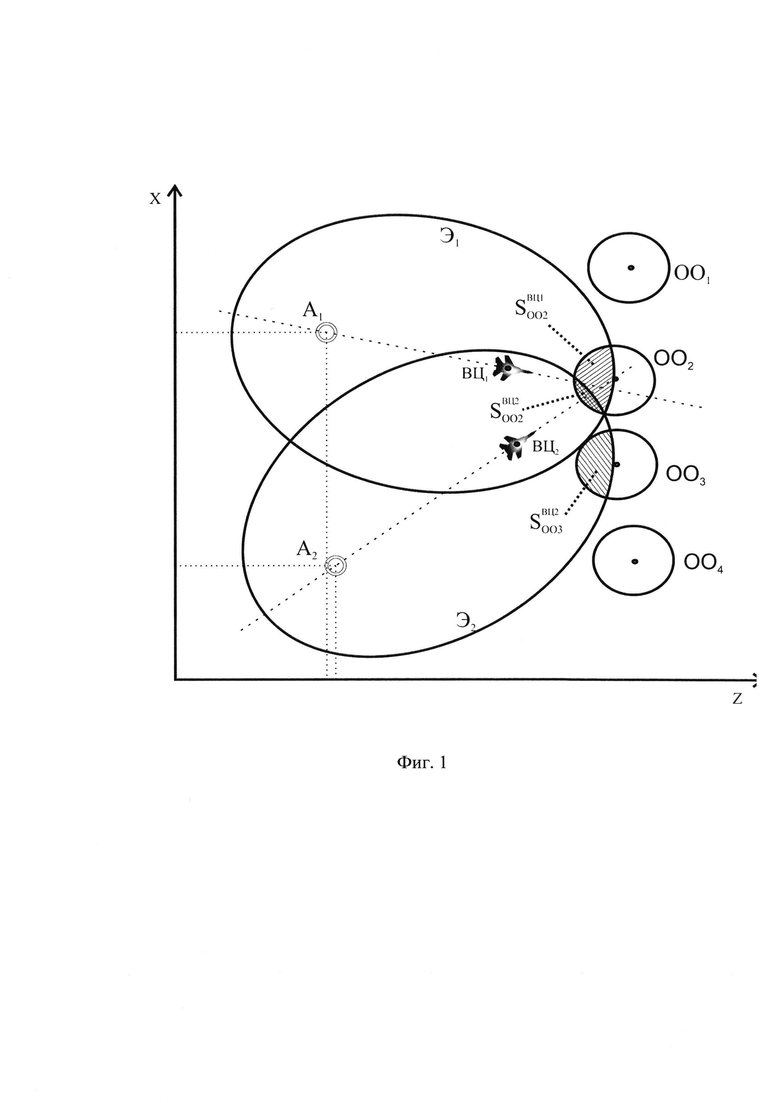
Сущность изобретения поясняется фиг. 1, где представлено взаимное расположение зон достижимости ВЦ по топливу (Э1, Э2) и круговых зон обороняемых объектов (ОО1…ОО4), при пересечении которых образуются площади их взаимного пересечения ( ).
).
На фиг. 1 обозначены: ВЦ1 - позиция первой ВЦ; ВЦ2 - позиция второй ВЦ; A1 - аэродром взлета первой ВЦ; А2 - аэродром взлета второй ВЦ; Э1 - зона достижимости первой ВЦ; Э2 - зона достижимости второй ВЦ; ОО1…ОО4 - круговые зоны поражения прикрываемых объектов;  площади пересечения зон достижимости по топливу и круговых зон прикрываемых объектов; X,Z - оси прямоугольной системы координат.
площади пересечения зон достижимости по топливу и круговых зон прикрываемых объектов; X,Z - оси прямоугольной системы координат.
С помощью средств РТР и (или) с помощью сигнальной обработки в РЛС определяются текущие координаты ВЦ и их тип (класс). Позиция первой ВЦ (ВЦ1) и аэродром ее взлета А1, являются фокусами эллипса ее достижимости Э1. Позиция второй ВЦ (ВЦ2) и аэродром ее взлета А2, являются фокусами эллипса ее достижимости Э2. Размеры эллипсов Э1 и Э2 определяются боевым радиусом по классу (типу) ВЦ1 и ВЦ2. Вокруг четырех прикрываемых объектов обороны ОО1…ОО4 строятся круговые зоны поражения с радиусом определяемым АСП по классу ВЦ1 и ВЦ2. Далее анализируются площади пересечения эллипсов Э1 и Э2 с зонами поражения ОО1…ОО4 вычисляемыми, например, с помощью метода Монте-Карло (см., например, Каханер Д., Моулер К., Нэш С. Численные методы и программное обеспечение: перевод с англ. - изд. второе, стереотип. - М.: Мир, 2001. 575 с. С 371-392). Из фиг. 1 следует, что ВЦ1 и ВЦ2 не представляют угрозы для OO1 и OO2, так как остаток топлива не позволяет долететь до рубежа применения АСП. Для ВЦ1 рубеж достижимости (Э1) пересекается только с зоной
поражения второго ОО2 следовательно делается вывод о высокой вероятности полета ВЦ1 для атаки второго OO2. Для ВЦ2 рубеж достижимости (Э2) пересекается с зонами поражения второго OO2 и третьего ОО3, при этом площади этих пересечений различны  следовательно делается вывод о возможной атаке ВЦ2 двух объектов обороны ОО2 и ОО3 однако более вероятна атака третьего объекта обороны OO3.
следовательно делается вывод о возможной атаке ВЦ2 двух объектов обороны ОО2 и ОО3 однако более вероятна атака третьего объекта обороны OO3.
Заявленный способ осуществляется в следующем порядке:
1. Определяются координаты обнаруженной ВЦ в прямоугольной системе координат ХВЦ, ZВЦ;
2. С помощью средств РТР и (или) РЛС выполняется распознавание класса (типа) обнаруженной ВЦ, по которому определяется практическая дальность полета ВЦ Lmax и типовой вариант загрузки АСП ВЦ.
3. Из типового варианта боевой нагрузки ВЦ определяем АСП с максимальной дальностью применения Wmax.
4. Определяем возможную границу зоны поражения r-го объекта обороны ВЦ с АСП максимальной дальности применения:

где Xor, Yor - координаты местоположения r-то объекта обороны.
5. Находим уравнение эллипса достижимости ВЦ по топливу по двум фокусным точкам - координатам аэродрома и текущим координатам ВЦ.
6. Определяем область пересечения Sr эллипса достижимости по топливу ВЦ и окружностью - зоной применения АСП по r-му объекту обороны методом Монте-Карло. Указанная задача решается для всех объектов обороны в рассматриваемой зоне. После проведения расчетов площади пересечения эллипса достижимости ВЦ и области применения АСП для всех объектов обороны получаем множество пересечений A{S1, S2, …, Sr …, SR}, где R - общее количество прикрываемых объектов обороны в рассматриваемой зоне. Некоторые Sr в множестве А будут нулевые и из
дальнейшего анализа могут быть исключены. Поэтому из множества А составим множество A*{Sr} с ненулевыми Sr.
7. Находится сумма всех ненулевых площадей Sr:

где R* - число объектов обороны, для которых площади пересечения эллипса достижимости ВЦ и области применения АСП отличны от нуля.
8. Тогда вероятность возможной атаки ВЦ r-го объекта обороны:

9. Ранжирование осуществляется путем упорядочивания функционалов с учетом важности объектов обороны, вычисленных для каждой ВЦ:

где kr - коэффициент важности r-го объекта обороны.
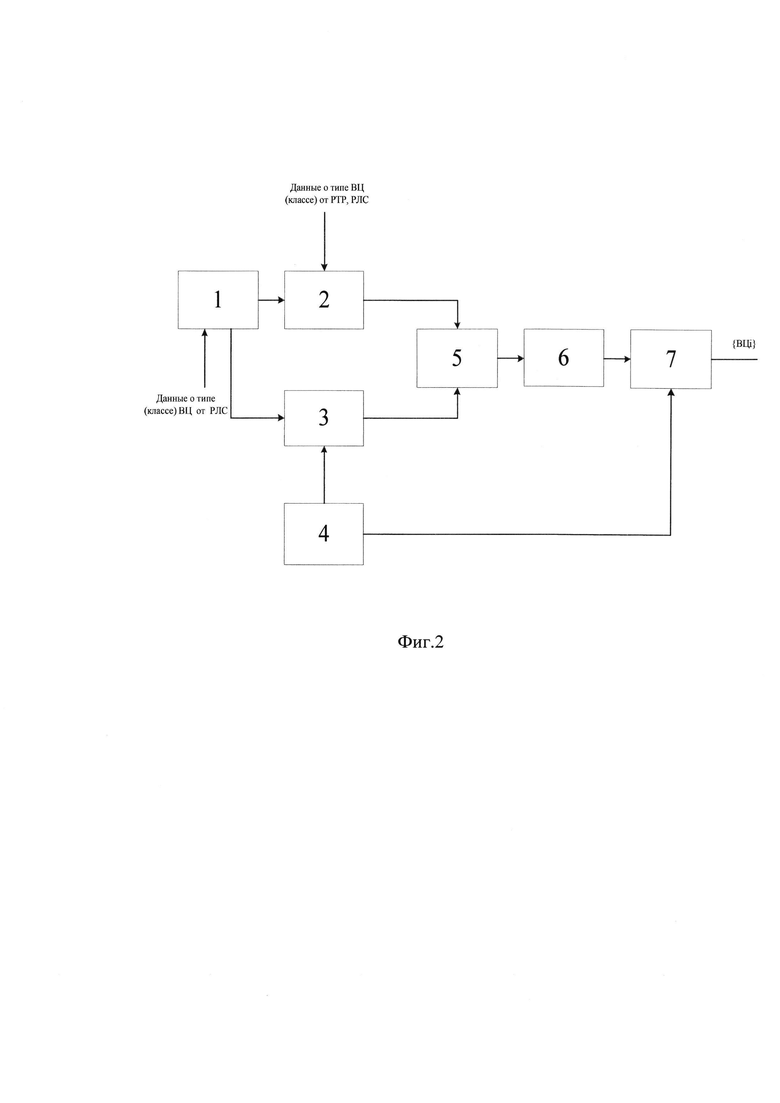
Устройство реализующее предлагаемый способ ранжирования воздушных целей приведено на фиг. 2, где обозначено: 1 - База данных о средствах воздушного нападения (СВН) и аэродромах противника; 2 - Блок вычисления зоны достижимости ВЦ; 3 - Блок вычисления зоны применения АСП; 4 - База данных о прикрываемых объектах обороны; 5 - Блок вычисления площадей пересечения; 6 - Блок вычисления вероятностей возможной атаки обороняемых объектов; 7 - Блок вычисления и ранжирования ВЦ.
Устройство работает следующим образом. На блок 1, блок 2 поступают данные о типе (классе) ВЦ от РТР, РЛС. Информация о СВН и аэродромах противника поступает с блока 1 на блок 2. С блока 2, блока 3 поступают данные о зонах достижимости ВЦ по топливу и зонах применения АСП на блок 5, где осуществляется вычисление площадей пересечения (Sj) зон достижимости ВЦ по топливу и круговых зон обороняемых объектов.
Данная информация поступает в блок 6. Далее в блоке 6 происходит вычисление вероятностей возможной атаки обороняемых объектов (Pi). Затем в блок 7 поступает информация с блока 6, а также информация с блока 4, на основе чего осуществляется ранжирование по степени опасности ВЦ.
Предлагаемое техническое решение промышленно применимо, так как для его реализации могут быть использованы микропроцессоры, широко распространенные в области электроники и электротехники.
Способ ранжирования воздушных целей (ВЦ) с учетом их рубежей достижимости и радиусов поражения их авиационных средств поражения (АСП). Достигаемый технический результат - повышение достоверности ранжирования ВЦ. Сущность изобретения заключается в том, что дополнительно определяют тип ВЦ, тип ее АСП, рассчитывают зону применения АСП по прикрываемым объектам обороны и зону достижимости ВЦ, вычисляют площадь пересечения зоны применения АСП и зоны достижимости ВЦ по топливу, определяют вероятность возможной атаки прикрываемых объектов обороны и ранжируют ВЦ. Способ заключается в том, что при известных типах (классах) ВЦ и их типовой боевой нагрузке позволяет оценить степень опасности каждой ВЦ для обороняемых объектов на основе анализа площадей пересечения зон достижимости ВЦ по топливу и круговых зон обороняемых объектов. 2 ил.
Способ ранжирования воздушных целей, основанный на определении координат воздушных целей и их ранжировании, отличающийся тем, что после измерения координат воздушных целей дополнительно определяют тип - класс воздушных целей и тип их авиационных средств поражения за счет средств радиотехнической разведки и радиолокационных станций, обладая информацией о типе - классе воздушных целей и координатах аэродромов противника, определяют рубежи достижимости воздушных целей по топливу, из типового варианта боевой нагрузки воздушных целей определяют авиационные средства поражения с максимальной дальностью применения, определяют возможную границу зоны поражения объектов обороны воздушными целями с помощью авиационных средств поражения максимальной дальности применения, рассчитывают зону применения авиационных средств поражения по прикрываемым объектам обороны и зону достижимости каждой воздушной цели, вычисляют площадь пересечения зоны применения авиационных средств поражения и зоны достижимости каждой воздушной цели по топливу, определяют вероятность возможной атаки прикрываемых объектов, ранжируют воздушные цели путем упорядочивания функционалов с учетом важности объектов обороны, вычисленных для каждой воздушной цели.
| СПОСОБ РАНЖИРОВАНИЯ ЦЕЛЕЙ | 2000 |
|
RU2190863C2 |
| СПОСОБ СТРОБОВОГО ОТОЖДЕСТВЛЕНИЯ СИГНАЛОВ С ИСТОЧНИКАМИ РАДИОИЗЛУЧЕНИЯ В МНОГОЦЕЛЕВОЙ ОБСТАНОВКЕ | 2014 |
|
RU2557784C1 |
| ПОСЛЕДОВАТЕЛЬНО-ПАРАЛЛЕЛЬНЫЙ СПОСОБ РАНЖИРОВАНИЯ СОПРОВОЖДАЕМЫХ ЦЕЛЕЙ | 2002 |
|
RU2219560C1 |
| Игольчатый электрод для депиляции кожи | 1949 |
|
SU80030A1 |
| US 20090079617 A1, 26.03.2009 | |||
| US 5325098 A, 28.06.1994 | |||
| US 5191337 A, 02.03.1993. | |||

