Изобретение относится к радиолокации и может быть использовано для повышения точности определения местоположения (МП) и других параметров наземных источников радиоизлучений (ИРИ) с помощью систем радиотехнической разведки (СРТР).
Ожидаемая высокая насыщенность районов военных действий ИРИ различного назначения создает сложную (многоцелевую) радиоэлектронную обстановку и предопределяет для СРТР принципиальную необходимость решения следующих задач:
- идентификации ИРИ по типам, экземплярам и тактическому назначению;
- сопровождения обнаруженных ИРИ по всем значимым информационным параметрам: несущей частоте, периоду повторения (интервалу следования) и длительности импульсов, ширине спектра сигналов, местоположению и др.
Актуальность решения этих задач обусловлена, в частности, необходимостью оценки угроз с ранжированием ИРИ по степени важности и выдачи команд целеуказания, например, противорадиолокационным ракетам для поражения наиболее опасных целей. При этом следует подчеркнуть, что успешность решения этих задач в многоцелевой обстановке во многом зависит от способности СРТР отождествлять принятые сигналы с конкретными экземплярами ИРИ, что и предопределяет потенциальные возможности их достоверного сопровождения.
Здесь под отождествлением сигналов понимается процесс взаимно однозначного установления принадлежности принятых сигналов к конкретным экземплярам ИРИ в условиях многоцелевой обстановки. Процесс правильного отождествления сигналов не вызывает существенных затруднений, если сигналы, принимаемые от различных ИРИ, имеют устойчивые различия численных значений радиотехнических параметров. В противном случае, когда в зоне наблюдения находится несколько однотипных ИРИ, то вероятность ошибочного отождествления их сигналов резко возрастает.
В [1, 2] представлены способы отождествления, применяемые в бортовых пеленгационных системах для обработки измеренных азимутов ИРИ. Среди них наиболее часто применяется на практике так называемый «площадной» способ, который рассматривается в качестве прототипа.
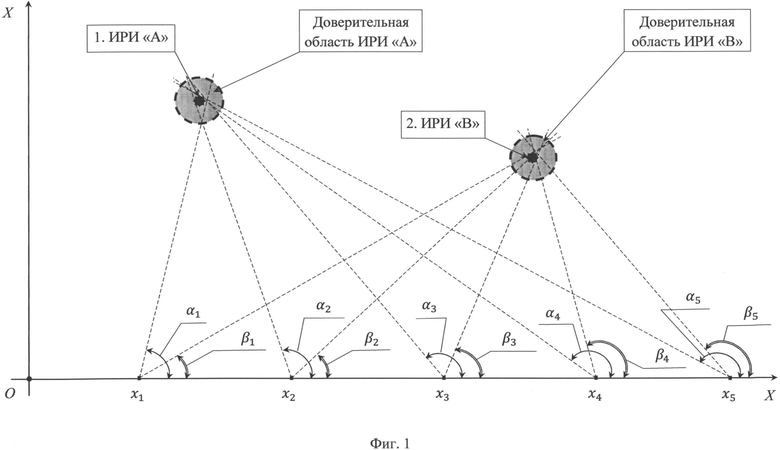
«Площадной» способ отождествления азимутальных пеленгов поясняется фиг. 1. Предполагается, что в точках x1, x2, x3, … производится измерение пеленгов, например, α1, β1, α2, β2, α3, β3 … на ИРИ «А» и ИРИ «В» соответственно. При этом точки пересечения пеленгов, измеренных в различных точках на один и тот же ИРИ, группируются в пределах небольших областей, которые называются доверительными областями (ДО) и с заданной доверительной вероятностью Рдов включают в себя точки истинного МП ИРИ. Точки пересечения пеленгов, измеренных на разные ИРИ, распределены по сравнительно большой площади и плотно не группируются. Пеленги, пересекающиеся в пределах ДО, отождествляются с тем ИРИ, к которому эта область относится. Точки пересечения пеленгов, находящиеся за пределами ДО, определяют местоположение ложных (несуществующих) ИРИ.
Недостатком «площадного» способа является невозможность обработки других параметров принимаемых сигналов (кроме пеленгов), а также совместной обработки нескольких разнотипных параметров.
Ниже будет предложен более рациональный по критерию «достоверность - вычислительные затраты» способ отождествления принятых сигналов с конкретными экземплярами обнаруженных (сопровождаемых) ИРИ в многоцелевой обстановке, основанный на использовании многомерных стробов (доверительных областей) по измеряемым фазовым координатам (параметрам). При этом будет полагаться, что выполняются следующие условия:
1) СРТР предназначена для оценки n координат состояния ИРИ, объединенных в вектор

каждого из N источников радиоизлучения при наличии соответствующих измерений

2) сигналы ИРИ поступают на СРТР в общем случае не одновременно, а результаты измерений определяются моделью

где k - номер дискрета времени, ξj,i(k) - центрированные некоррелированные гауссовские шумы с известной дисперсией Dиj,i(k) в k-й момент времени;
3) оценки 
В процессе разработки предлагаемого способа отождествления необходимо решить две задачи:
1) определить размеры стробов, гарантирующих требуемую достоверность отождествления;
2) сформулировать правило принятия решения о принадлежности полученных измерений конкретным ИРИ.
При решении этих задач будет полагаться, что за время, равное Δt (k)=tk-tk-1, координаты (1) состояния ИРИ изменяются по закону

где 
Тогда с учетом (3) и (4) приращение измерений и его дисперсия за интервал Δt (k) будут определяться выражениями соответственно [3]


где  - дисперсия скорости изменения параметров [3].
- дисперсия скорости изменения параметров [3].
Здесь следует отметить, что численные значения  могут определяться по правилу
могут определяться по правилу  вытекающему из соотношения
вытекающему из соотношения  Для большинства параметров наземных (морских) неподвижных (малоподвижных) ИРИ, не зависящих от перемещений самолета-носителя СРТР, можно полагать
Для большинства параметров наземных (морских) неподвижных (малоподвижных) ИРИ, не зависящих от перемещений самолета-носителя СРТР, можно полагать 
Поскольку процесс (3) является гауссовским, то все приращения (5) должны с вероятностью 0,997 укладываться в диапазон

При этом размер строба ΔXиj,i(k)max для j-го ИРИ по i-й измеренной фазовой координате должен удовлетворять условию

где K=1…2 обеспечивает выполнение условия (8) с заранее заданной вероятностью Р=0,68…0,95, a Dиj,i(k) - дисперсия шумов измерений ΔXиj,i(k)max.
Выражение (8) определяет размеры строба для каждого j-го ИРИ по каждой i-й фазовой координате, а также предопределяет использование следующего правила принятия решения об отождествлении. Если все измерения Xин,i(k), принадлежащие в k-й момент времени неизвестному экземпляру ИРИ, удовлетворяют условию
 то принимается решение об их отождествлении с фазовыми координатами j-го ИРИ. При этом результат отождествления представляется в виде вектора Xиj*(k)=Xин. Здесь Xиj*(k)=[Xиj*,1(k), Xиj*,2(k), …, Xиj*i(k), …, Xиj*,i(k)], а Xин(k)=[Xин,1(k), Xин,2(k), …, Xин,i(k), …, Xин,i(k)], где j* - индекс ИРИ, с которым отождествлен измеренный вектор параметров Xин(k). Если условие (9) не выполняется хотя бы по одной из n координат, то проверяется выполнение этого условия для следующего экземпляра сопровождаемого ИРИ в соответствии с выражением
то принимается решение об их отождествлении с фазовыми координатами j-го ИРИ. При этом результат отождествления представляется в виде вектора Xиj*(k)=Xин. Здесь Xиj*(k)=[Xиj*,1(k), Xиj*,2(k), …, Xиj*i(k), …, Xиj*,i(k)], а Xин(k)=[Xин,1(k), Xин,2(k), …, Xин,i(k), …, Xин,i(k)], где j* - индекс ИРИ, с которым отождествлен измеренный вектор параметров Xин(k). Если условие (9) не выполняется хотя бы по одной из n координат, то проверяется выполнение этого условия для следующего экземпляра сопровождаемого ИРИ в соответствии с выражением

и так далее для всех обнаруженных (сопровождаемых) ИРИ. Если условия (9), (10) не выполняются ни для одного из обнаруженных (сопровождаемых) экземпляров ИРИ, то принимается решение об обнаружении нового ИРИ, т.е. j*=N+1.
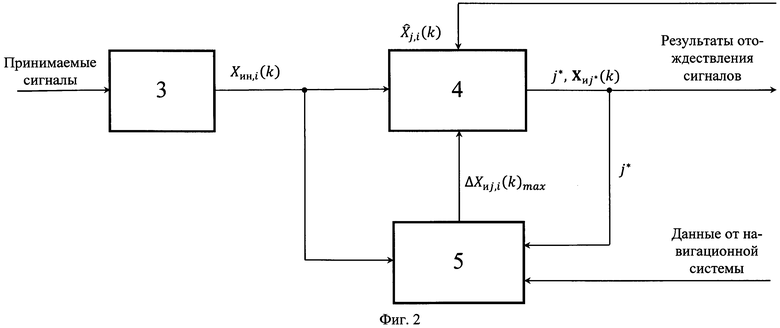
На фиг. 2 представлена упрощенная структурная схема одного из возможных вариантов системы, реализующей предлагаемый способ стробового отождествления пеленгов ИРИ в многоцелевой обстановке. Система включает в себя n-канальный измеритель параметров принимаемых сигналов (И) 3, устройство сравнения (УС) 4, а также бортовую вычислительную систему (БВС) 5. Принимаемые сигналы поступают на измеритель И, формирующий в каждый k-й момент времени результаты Xин,i(k), которые подаются на УС, а также в БВС, вычисляющую в соответствии с (8) размеры стробов ΔXиj,i(k)max. При этом информация о местоположении СРТР и скорости ее движения поступает от навигационной системы, а значения
Реализация описанного выше способа позволит повысить достоверность отождествления сигналов в многоцелевой обстановке и тем самым обеспечит качественное определение местоположения обнаруживаемых ИРИ и их надежное сопровождение.
ЛИТЕРАТУРА
1. Мельников Ю.П. Воздушная радиотехническая разведка (методы оценки эффективности). М.: Радиотехника, 2005.
2. Мельников Ю.П., Попов С.В. Радиотехническая разведка. Методы оценки эффективности местоопределения источников излучения. М.: Радиотехника, 2008.
3. Тихонов В.И. Статистическая радиотехника. 2-ое изд., перераб. и доп. М.: Радио и связь, 1982.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ стробового отождествления сигналов с источниками радиоизлучения в многоцелевой обстановке | 2020 |
|
RU2752863C1 |
| СПОСОБ ПОЛУЧЕНИЯ РАДИОТЕХНИЧЕСКОЙ ИНФОРМАЦИИ И РАДИОТЕХНИЧЕСКИЙ КОМПЛЕКС ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2014 |
|
RU2562616C1 |
| СПОСОБ ТРАССОВОГО СОПРОВОЖДЕНИЯ ВОЗДУШНЫХ МАНЕВРИРУЮЩИХ ИСТОЧНИКОВ РАДИОИЗЛУЧЕНИЯ ПО ПЕЛЕНГОВОЙ ИНФОРМАЦИИ ОТ ОДНОПОЗИЦИОННОЙ СИСТЕМЫ РАДИОТЕХНИЧЕСКОЙ РАЗВЕДКИ ВОЗДУШНОГО БАЗИРОВАНИЯ | 2017 |
|
RU2660498C1 |
| УГЛОМЕРНО-КОРРЕЛЯЦИОННЫЙ СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ НАЗЕМНЫХ ИСТОЧНИКОВ РАДИОИЗЛУЧЕНИЯ | 2011 |
|
RU2458358C1 |
| СПОСОБ ОТОЖДЕСТВЛЕНИЯ ПЕЛЕНГОВ ИСТОЧНИКОВ РАДИОИЗЛУЧЕНИЙ ПО ИХ РАДИОТЕХНИЧЕСКИМ ХАРАКТЕРИСТИКАМ | 2023 |
|
RU2817619C1 |
| СПОСОБ ОТОЖДЕСТВЛЕНИЯ ПЕЛЕНГОВ ИСТОЧНИКОВ РАДИОИЗЛУЧЕНИЙ ПО ИХ РАДИОТЕХНИЧЕСКИМ ХАРАКТЕРИСТИКАМ ДВУХПОЗИЦИОННЫМИ ПАССИВНЫМИ РАДИОЭЛЕКТРОННЫМИ СРЕДСТВАМИ | 2017 |
|
RU2656370C1 |
| СПОСОБ ТРАССИРОВАНИЯ НАЗЕМНЫХ И МОРСКИХ РАДИОИЗЛУЧАЮЩИХ ЦЕЛЕЙ | 2023 |
|
RU2807613C1 |
| Способ определения координат источников радиосигналов с взаимно перекрывающимися спектрами | 2024 |
|
RU2834966C1 |
| АДАПТИВНЫЙ СПОСОБ ПРОСТРАНСТВЕННОГО ОТОЖДЕСТВЛЕНИЯ ПЕЛЕНГОВ С НАЗЕМНЫМИ ИСТОЧНИКАМИ РАДИОИЗЛУЧЕНИЯ И СИСТЕМА ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2018 |
|
RU2686481C1 |
| СПОСОБ БОНДАРЕНКО А.В. ПОЛУЧЕНИЯ РАДИОТЕХНИЧЕСКОЙ ИНФОРМАЦИИ И РАДИОТЕХНИЧЕСКИЙ КОМПЛЕКС ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2015 |
|
RU2599259C1 |
Изобретение относится к радиолокации и может быть использовано для повышения точности определения местоположения и других параметров наземных источников радиоизлучений (ИРИ) с помощью систем радиотехнической разведки (СРТР). Достигаемый технический результат - повышение достоверности отождествления сигналов в многоцелевой обстановке. Указанный результат достигается за счет того, что СРТР вычисляет оценки


Способ стробового отождествления сигналов с источниками радиоизлучения (ИРИ) в многоцелевой обстановке, заключающийся в том, что система радиотехнической разведки вычисляет оценки  i-x координат состояния j-х обнаруженных и сопровождаемых ИРИ, на основании которых производится отождествление результатов измерения координат состояния Xин,i(k), полученных в k-й момент времени, с соответствующим ИРИ, отличающийся тем, что для каждой i-й координаты состояния каждого j-го обнаруженного и сопровождаемого ИРИ определяется интервал значений
i-x координат состояния j-х обнаруженных и сопровождаемых ИРИ, на основании которых производится отождествление результатов измерения координат состояния Xин,i(k), полученных в k-й момент времени, с соответствующим ИРИ, отличающийся тем, что для каждой i-й координаты состояния каждого j-го обнаруженного и сопровождаемого ИРИ определяется интервал значений

где ΔXиj,i(k)max - размер строба для j-го ИРИ по i-й измеренной координате состояния;
K - коэффициент пропорциональности, значение которого выбирается в диапазоне от 1 до 2, обеспечивающее выполнение (1) с заранее заданной вероятностью;
 - дисперсия скорости изменения координат состояния
- дисперсия скорости изменения координат состояния 
Δt(k)=tk-tk-1 - дискрет времени;
Dиj,i(k) - дисперсия измерения величины Xиj,i(k);
а также совокупность интервалов по всем координатам состояния каждого ИРИ образует многомерный строб, при попадании в который результат измерения вектора состояния Хин(k) в k-й момент времени отождествляется с конкретным ИРИ, при этом, если измеренный вектор Хин(k) не попал в пределы ни одного из стробов j-го ИРИ, где  то принимается решение об обнаружении нового ИРИ с индексом N+1.
то принимается решение об обнаружении нового ИРИ с индексом N+1.
| МЕЛЬНИКОВ Ю.П | |||
| Радиотехническая разведка | |||
| Методы оценки эффективности местоопределения источников излучения | |||
| Москва, Радиотехника, 2008 | |||
| УГЛОМЕРНО-КОРРЕЛЯЦИОННЫЙ СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ НАЗЕМНЫХ ИСТОЧНИКОВ РАДИОИЗЛУЧЕНИЯ | 2011 |
|
RU2458358C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ПЕРЕДАТЧИКА МОБИЛЬНЫМ ПЕЛЕНГАТОРОМ | 2006 |
|
RU2316784C1 |
| СПОСОБ ПОВЫШЕНИЯ РАДИОЛОКАЦИОННОГО РАЗРЕШЕНИЯ, СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ И СПОСОБ ДИСТАНЦИОННОГО ВЫЯВЛЕНИЯ СИСТЕМОЙ МАЛОРАЗМЕРНЫХ ОБЪЕКТОВ | 2004 |
|
RU2265866C1 |
| СПОСОБ ОБНАРУЖЕНИЯ И ОПРЕДЕЛЕНИЯ КООРДИНАТ И ПАРАМЕТРОВ ЦЕЛИ В МНОГОПОЗИЦИОННОЙ РАДИОЛОКАЦИОННОЙ СИСТЕМЕ | 2006 |
|
RU2330306C1 |
| US 4916455 A, 10.04.1990 | |||
| EP1601989 A1, 07.12.2005 | |||
| WO 2007142532 A1, 13.12.2005 | |||
| US 6421007 B1, 16.07.2002 | |||

