Ссылка на родственные заявки
Настоящая заявка испрашивает приоритет в соответствии с предварительной заявкой на выдачу патента США №62/065,868 под названием «Система и способ локализации отказов при определении углового пространственного положения воздушного судна», поданной 20 октября 2014 года (дело патентного поверенного №Н0047475), содержание которой полностью включено в настоящий документ посредством ссылки.
Уровень техники
В летательном аппарате - в частности, в самолете гражданской авиации - предусмотрен минимальный комплект оборудования, который должен находиться в рабочем состоянии, чтобы обеспечить вылет самолета. Что касается приборов контроля углового пространственного положения (которые выдают показания тангажа и крена самолета), то современный уровень развития техники требует, чтобы некоторые типы самолетов были снабжены двумя первичными источниками и одним вторичным источником определения углового пространственного положения, чтобы самолет мог вылететь. Результаты измерения углового пространственного положения, полученные от двух указанных первичных источников, отображаются основной системой индикации, которая предусматривает отдельные экраны для командира воздушного судна и второго пилота. Данные по вторичному или резервному источнику определения углового пространственного положения отображаются резервной системой индикации. Причина, по которой все три интегрированные системы должны быть в рабочем состоянии до взлета летательного аппарата, заключается в необходимости мгновенного выявления дезориентирующих данных; то есть, если один из источников определения углового пространственного положения начинает выдавать ложную информацию, когда воздушное судно находится в полете, данные по двум остальным источникам должны по-прежнему согласовываться друг с другом для быстрого выявления источника, выдающего дезориентирующие данные. Самолет не сможет взлететь при выходе из строя какого-либо одного из трех источников определения углового пространственного положения, и эксплуатант воздушного судна (например, оператор авиаперевозок) понесет значительный ущерб от задержки вылета или отмены полета до тех пор, пока не будут удовлетворены минимальные требования к компоновке самолета всеми необходимыми приборами. Во избежание таких издержек авиакомпании могут хранить большой распределенный запас приборов контроля углового пространственного положения с тем, чтобы можно было быстро установить сменную деталь для удовлетворения требований к рабочей конфигурации летательного аппарата. Расходы на содержание этих запасных приборов значительны, хотя и меньше издержек, связанных с отменой или задержкой полетов.
По причинам, указанным выше, а также по причинам, перечисленным ниже, которые станут очевидными для любого специалиста в данной области техники после ознакомления с настоящей заявкой, на современном этапе развития техники существует потребность в альтернативных системах и способах локализации отказов при определении углового пространственного положения воздушного судна, характеризующегося конфигурацией с перечнем минимально исправного оборудования.
Сущность изобретения
Варианты осуществления настоящего изобретения предлагают способы и системы локализации отказов при определении углового пространственного положения воздушного судна, которые станут понятными после ознакомления с нижеследующим описанием.
Предложены системы и способы локализации отказов при определении углового пространственного положения воздушного судна. В одном из вариантов реализации заявленного изобретения система интегрирования и индикации данных об угловом пространственном положении воздушного судна включает в себя: систему индикации, содержащую основную систему индикации положения воздушного судна для отображения первого решения в отношении углового пространственного положения, и резервную систему индикации положения воздушного судна для отображения второго решения в отношении углового пространственного положения; систему интегрирования данных об угловом пространственном положении, генерирующую решение по интегрированным данным об угловом пространственном положении (решение AI), рассчитанное по результатам одного или нескольких измерений, полученным из источника данных для выработки решения по угловому пространственному положению, которое включает в себя результаты измерения тангажа и крена, где источник данных для выработки решения по угловому пространственному положению выдает данные независимо от каких-либо данных, сгенерированных навигационными приборами с инерциальными датчиками на борту воздушного судна, а решение AI не отображается ни основной системой индикации, ни резервной системой индикации; и прибор контроля углового пространственного положения, соединенный с системой интегрирования данных об угловом пространственном положении, который сравнивает первое решение в отношении углового пространственного положения со вторым решением в отношении углового пространственного положения; при этом, когда первое решение в отношении углового пространственного положения отклоняется от второго решения в отношении углового пространственного положения на величину, превышающую пороговое значение, прибор контроля углового пространственного положения определяет на экране системы индикации, какое из решений в отношении углового пространственного положения - первое или второе - является ложным, исходя из того, какое из решений в отношении углового пространственного положения - первое или второе - характеризуется большим отклонением от решения по интегрированным данным об угловом пространственном положении.
Краткое описание чертежей
Варианты осуществления настоящего изобретения станут доступными для понимания, а их дополнительные преимущества и сферы использования станут очевидными, если рассматривать их с учетом описания предпочтительных вариантов реализации заявленного изобретения и в привязке к следующим чертежам, где:
На фиг. 1 показана схема, иллюстрирующая систему отображения углового пространственного положения согласно одному из вариантов осуществления настоящего изобретения;
На фиг. 2 показана схема, иллюстрирующая систему отображения углового пространственного положения согласно еще одному из вариантов осуществления настоящего изобретения;
На фиг. 3 показана схема, иллюстрирующая систему отображения углового пространственного положения согласно еще одному из вариантов осуществления настоящего изобретения;
На фиг. 4, 5 и 6 проиллюстрированы примеры индикации данных на резервном дисплее согласно еще одному из вариантов осуществления настоящего изобретения; а
На фиг. 7 представлена блок-схема, иллюстрирующая способ согласно одному из вариантов осуществления настоящего изобретения.
Согласно общепринятой практике различные описанные признаки не вычерчены в масштабе, а представлены таким образом, чтобы подчеркнуть отличительные признаки, характерные для настоящего изобретения. По всему тексту описания и на всех чертежах одни и те же элементы обозначены одинаковыми номерами позиций.
Подробное описание изобретения
В следующем подробном описании даны ссылки на прилагаемые чертежи, являющиеся его неотъемлемой частью, на которых примеры конкретных вариантов реализации настоящего изобретения на практике носят исключительно иллюстративный характер. Эти варианты осуществления заявленного изобретения описаны достаточно подробно, чтобы любой специалист в данной области техники мог реализовать их на практике, но следует понимать, что могут быть использованы и иные варианты осуществления настоящего изобретения, и что в логическую, механическую и электрическую части могут быть внесены определенные изменения без отступления от объема заявленного изобретения. Таким образом, нижеследующее подробное описание не следует рассматривать в ограничительном смысле.
Варианты осуществления настоящего изобретения предлагают систему и способы реализации специализированного, не навигационного и более дешевого, источника данных об угловом пространственном положении, который предназначен, главным образом, для локализации опасной дезориентирующей информации, а не для выдачи данных об угловом пространственном положении, используемых для обеспечения полета воздушного судна. С помощью вариантов реализации заявленного изобретения, описанных в настоящем документе, минимальное количество рабочих источников данных об угловом пространственном положении в требуемой конфигурации может быть сокращено на одну единицу. В этом случае рабочая конфигурация, пригодная для обеспечения полета воздушного судна, будет включать в себя один вторичный источник данных об угловом пространственном положении и один первичный источник данных об угловом пространственном положении. За счет сокращения количества источников данных об угловом пространственном положении, необходимых для установления рабочей конфигурации, варианты осуществления настоящего изобретения, описанные в этой заявке, могут быть использованы для (1) уменьшения уровня резервирования оборудования на борту воздушного судна, благодаря чему можно сократить текущие расходы на его обслуживание, и/или (2) смягчения требований к наличию резервного оборудования и сокращения соответствующих издержек.
Например, в некоторых случаях практического применения варианты реализации заявленного изобретения обеспечивают на уровне архитектуры воздушного судна возможность его взлета и управления этим судном в полете с вышедшим из строя одним из основных блоков ADIRU. Если какой-либо из оставшихся блоков ADIRU или ADAHRU выдает ложные данные по тангажу или крену при определении углового пространственного положения, неопределимые иным способом, то с помощью такого варианта осуществления настоящего изобретения экипаж может определить, какой из каналов выдает ложную информацию. В некоторых случаях практического применения разрешающая способность составляет +/- 5 градусов фактического тангажа и +/- 10 градусов фактического крена. Кроме того, варианты осуществления настоящего изобретения, описанные в этой заявке, обеспечивают многообразие оборудования, которое может быть использовано для уменьшения риска полного отказа функции интегрирования данных об угловом пространственном положении, что в противном случае может привести к неправильной идентификации и локализации канала определения углового пространственного положения.
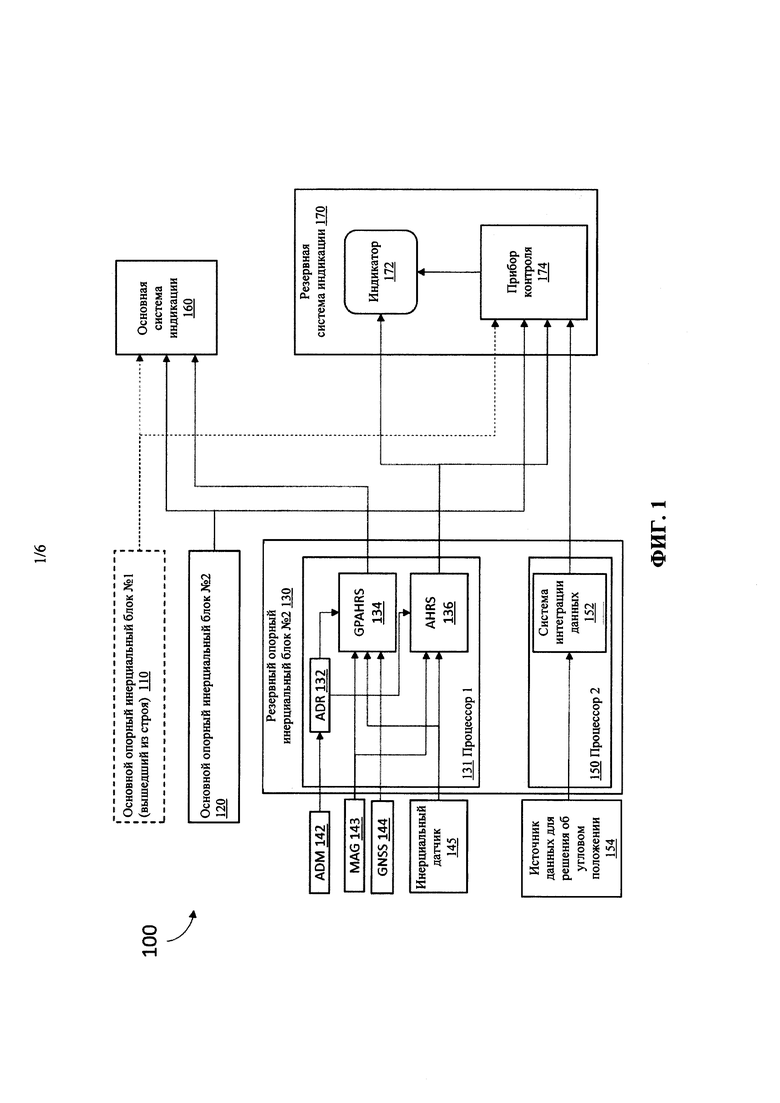
На фиг. 1 представлена схема, иллюстрирующая систему (100) интегрирования и индикации данных об угловом пространственном положении воздушного судна согласно одному из вариантов осуществления настоящего изобретения. В варианте реализации заявленного изобретения, проиллюстрированном на фиг. 1, система (100) индикации данных об угловом пространственном положении содержит два независимых (первый и второй) опорных инерциальных блока (обозначены позициями (110) и (120)) и гибридный опорный блок (обозначен позицией (130)). В конкретном варианте осуществления настоящего изобретения, проиллюстрированном на фиг. 1, первый опорный инерциальный блок представляет собой первый блок (110) воздушных сигналов и инерциальной системы (ADIRU), второй опорный инерциальный блок представляет собой второй блок (120) воздушных сигналов и инерциальной системы (ADIRU), а гибридный опорный блок представляет собой гибридный блок (130) воздушных сигналов и отсчета углового пространственного положения (ADAHRU). Каждый из блоков (110) и (120) ADIRU отрабатывает первичные данные об угловом пространственном положении, пригодные для управления полетом воздушного судна, которые были получены с навигационных датчиков, таких как, помимо прочего, кольцевой лазерный гироскоп. Такие навигационные инерциальные датчики могут также называться навигационными приборами с инерциальными датчиками, поскольку они выдают достаточно точные данные, которые могут быть выведены на дисплей пилота с целью их использования для управления полетом. Блок (130) ADAHRU представляет собой навигационный прибор, который предлагает множественные навигационные решения, выведенные по данным с различных групп датчиков. Например, в варианте осуществления настоящего изобретения, который проиллюстрирован на фиг. 1, блок (130) ADAHRU включает в себя опорный блок (132) воздушных сигналов (ADR), гибридную систему (134) глобального позиционирования и курсовертикали (GPAHRS) и автономную систему (136) определения курса и углового пространственного положения (AHRS).
В одном из вариантов реализации заявленного изобретения система (134), GPAHRS соединена с блоком (132) ADR, магнитометром (143) и, по меньшей мере, с одним приемником (144) глобальной навигационной спутниковой системы (ГНСС), который может представлять собой, например, приемник глобальной системы позиционирования (GPS). Во время работы система (134) GPAHRS использует данные об угловом пространственном положении с блока (132) ADR, информацию о дальности или местоположении с приемника (144) ГНСС, данные с инерциальных датчиков (145) и данные о магнитном поле с магнитометра (143) для выработки решения в отношении углового пространственного положения. Это решение по угловому пространственному положению, полученное системой (134) GPAHRS, отображается на дисплее основной системы (160) индикации, предназначенном для пилота, и пригодно для управления полетом воздушного судна, когда система GPAHRS функционирует в основном режиме с поддержкой системы ГНСС. Иными словами, при наличии данных ГНСС система (134) GPAHRS вырабатывает решение по угловому пространственному положению, эквивалентное по качеству и параметрам решениям по угловому пространственному положению, которые генерируются блоками (110) и (120) ADIRU. Не в основном режиме (например, при отсутствии данных с ГНСС) система (134) GPAHRS работает по инерции. При работе по инерции эффективность системы (130) GPAHRS зависит от таких факторов, как динамика полета воздушного судна и данные магнитометра. Следует отметить, что решение по угловому пространственному положению, сгенерированное системой (134) GPAHRS, выводится с использованием разнородных входных данных и способов, как и выводимые по инерциальным данным решения, которые генерируются блоками (110) и (120) ADIRU. Решение системы (134) генерирует поддерживаемое ГНСС решение по угловому пространственному положению, которое пересылается в основную систему (160) индикации для показа пилотам в качестве вторичного решения, и которое, соответственно, характеризуется достаточной точностью, чтобы пилот его мог использовать в навигационных целях.
Что касается системы (136) AHRS, то в одном из вариантов осуществления настоящего изобретения она также соединена с блоком (132) ADR, магнитометром (143) а инерциальным датчиком (145). Инерциальный датчик (145) представляет собой инерциальный датчик класса AHRS, например, такой как, помимо прочего, микроэлектромеханический (MEMS) инерциальный датчик. Система (136) AHRS рассчитана на выработку решения по угловому пространственному положению, исходя из угловой скорости воздушного судна, значений его ускорения и высоты, независимо от источников данных, поддерживаемых системой ГНСС. Система (136) AHRS может также рассчитать курс, который зависит от показаний магнитометра и характеризуется такими же подрежимами, что и решение системы (134) GPAHRS. Решение по угловому пространственному положению, сгенерированное системой (136) AHRS, может также включать в себя вертикальный контурный фильтр, который зависит от данных по высоте, полученных с блока (132) ADR. При отсутствии данных по высоте вертикальные параметры также недоступны. Решение системы (136) AHRS генерирует полностью независимое решение по угловым пространственным положениям, которое передается в резервную систему (170) индикации для отображения на резервном дисплее (172) пилота в качестве вторичного решения, и которое, соответственно, характеризуется достаточной точностью, чтобы пилот мог его использовать в навигационных целях.
Согласно вариантам реализации заявленного изобретения система (100) индикации углового пространственного положения содержит дополнительную систему обнаружения углового пространственного положения, которая генерирует решение по угловому пространственному положению (как по тангажу, так и по крену), независимо от тех систем, которые используются для передачи информации об угловом пространственном положении в основную и резервные системы ((160) и (170)) индикации для взаимодействия с пилотами воздушного судна. Это независимое решение в отношении углового пространственного положения называется в данном документе решением по интегрированным данным об угловом пространственном положении (решением AI).
Как показано на фиг. 1, в одном из вариантов реализации заявленного изобретения гибридный опорный блок (130) (т.е. блок (130) ADAHRU) дополнительно содержат систему (152) интегрирования данных об угловом пространственном положении, которая связана с источником (154) данных для выработки решения по угловому пространственному положению. В одном из вариантов осуществления настоящего изобретения источник (154) данных для выработки решения по угловому пространственному положению представляет собой относительно недорогой инерциальный измерительный блок не навигационного типа, например, инерциальный датчик MEMS. В других вариантах реализации заявленного изобретения источник (154) данных для выработки решения по угловому пространственному положению может представлять собой группу датчиков или других контрольно-измерительных приборов, выполняющих одно или несколько инерциальных измерений, магнитометрических измерений, измерений с помощью ГНСС, измерений воздушных сигналов или иных данных подобного рода, по которым можно аппроксимировать угловое пространственное положение воздушного судна (тангаж и крен), или их сочетаний.
Решение AI используется, как было указано выше, в случае если один из навигационных приборов, описанных выше, вышел из строя, в результате чего пилот должен опираться лишь на данные о высоте, которые отображаются на дисплеях оставшихся в работе приборов. Но даже в этом случае решение AI используется только тогда, когда наблюдается несоответствие между данными, отображаемыми оставшимися в работе приборами. В таком случае решение AI будет определять, каким из имеющихся показаний об угловом пространственном положении может доверять пилот, а какие из них должны быть заблокированы или не учитываться каким-либо иным образом. Поскольку само решение AI никогда не отображается на каких-либо дисплеях пилотов, ни система (152) интегрирования данных об угловом пространственном положении, ни источник (154) данных для выработки решения по угловому пространственному положению, не обязательно должны быть системами навигационного типа, выполняющими измерения навигационного качества. Более того, поскольку решение AI вырабатывается в ходе выполнения разнотипных и независимых друг от друга процессов в отличие от прочих решений в отношении углового пространственного положения, оно не будет восприимчиво к отказам по общей причине, которые могут негативно влиять на прочие решения по угловому пространственному положению.
В варианте осуществления настоящего изобретения, который проиллюстрирован на фиг. 1, решение AI передается из системы (152) интегрирования данных об угловом пространственном положении в прибор (174) контроля углового пространственного положения, который может быть интегрирован в резервную систему (170) индикации. Прибор (174) контроля окончательно устанавливает выход прибора из строя и необходимость локализации канала поступления данных об угловом пространственном положении. Как показано на фиг. 1, в состав резервной системы (170) индикации входит приборный индикатор (172), который показывает пилоту вторичное решение по угловому пространственному положению, сгенерированное системой (136) AHRS. В целях диверсификации данных резервная система (170) индикации выполняет свои функции, используя аппаратные средства и процессы, отличные от тех, которые используются основной системой (160) индикации, которая отображает решения по угловому пространственному положении., сгенерированные блоком (110) ADIRU, блоком (120) ADIRU и системой (134) GPAHRS.
Прибор (174) контроля углового пространственного положения также получает первичные данные об угловом пространственном положении с блоков (110) и (120) ADIRU, а также вторичные данные об угловом пространственном положении, сгенерированные системой (136) AHRS. Как будет подробнее описано ниже, в ситуации, когда известно, что один из блоков (110) или (120) ADIRU отказал или иным образом вышел из строя, прибор (174) контроля углового пространственного положения начинает отслеживать и сравнивать первичное решение по угловому пространственному положению с оставшегося в работе блока ADIRU со вторичным решением по угловому пространственному положению, сгенерированному системой (136) AHRS. Если в этом режиме разница между первичным решением и вторичным решением по угловому пространственному положению превышает пороговое значение, то используется решение AI с тем, чтобы определить, какое из этих решений правильное, и какому из них - первичному или вторичному - можно доверять.
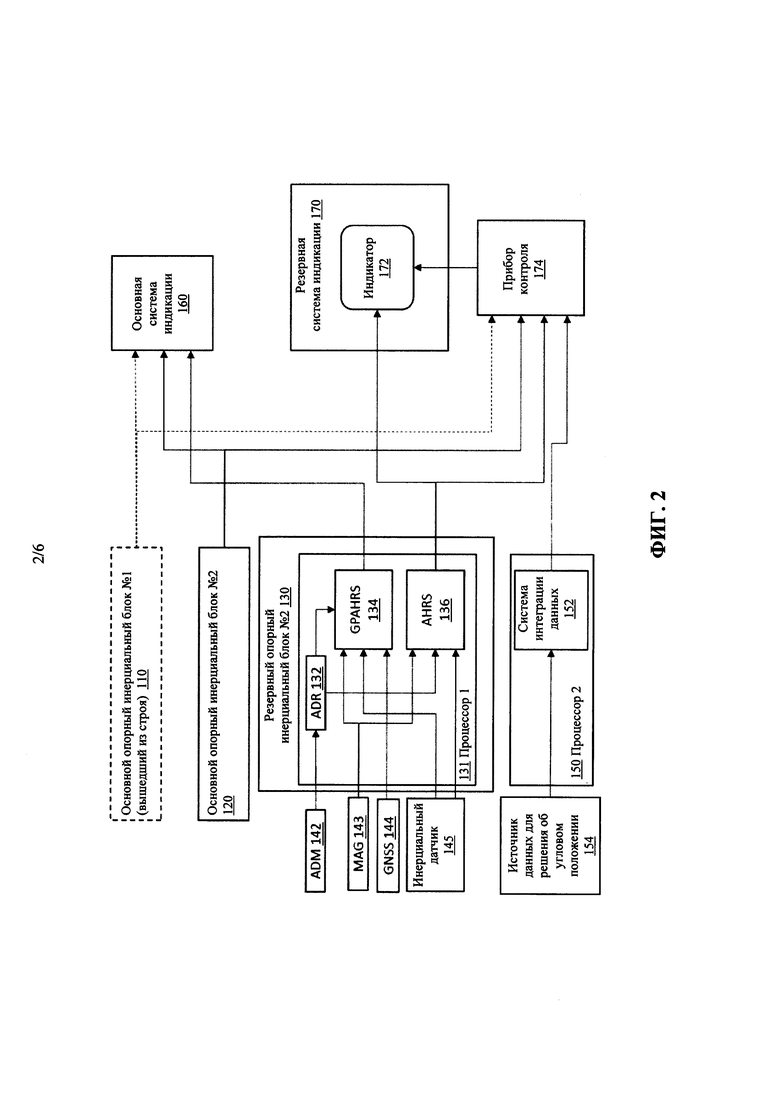
Следует иметь в виду, что хотя на фиг. 1 показано, что гибридный опорный блок (130) реализован в системе (152), а прибор (174) контроля углового пространственного положения предусмотрен в резервной системе (170) индикации, эта конфигурация представлена исключительно для примера. Как показано на фиг. 2, и система (152) интегрирования данных по угловому пространственному положению, и прибор (174) контроля углового пространственного положения, и указанная система вместе с указанным прибором, могут быть реализованы в любом месте как часть какой-либо иной бортовой радиоэлектронной аппаратуры. Например, система (152) интегрирования данных по угловому пространственному положению и прибор (174) контроля углового пространственного положения, как по одному, так и вместе, могут быть интегрированы в систему (FMS) или (FCS) управления полетом самолета.
В случаях, когда система интегрирования данных по угловому пространственному положению реализована в блоке (130) ADAHRU, блок (130) ADAHRU может содержать многопроцессорную программируемую пользователем матрицу логических элементов типа FPGA. Вычисление решения AI может быть обособлено от общих нераспознанных ложных отказов, что может повлиять на вычисление решения по угловому пространственному положению системой (136) AHRS за счет использования автономного процессора, управляющего заданной частью программных средств для вычисления решения AI, Например, в одном из вариантов осуществления настоящего изобретения решение, выполняемое системой (136) AHRS, может быть рассчитано с использованием первого процессора (131), установленного на матрице FPGA. Решение AI рассчитывается на втором процессоре (150), также установленном на матрице FPGA, который соединен с источником (154) данных для выработки решения по угловому пространственному положению. В некоторых вариантах реализации заявленного изобретения второй процессор (150), генерирующий решение AI, может обмениваться данными автономно, связываясь непосредственно с прибором (174) контроля углового пространственного положения. Однако, по меньшей мере, в одном альтернативном варианте осуществления настоящего изобретения второй процессор (150) упаковывает решение AI в целостно-защищенный пакет данных, который затем пересылается в прибор (174) контроля углового пространственного положения через первый процессор (131), как это показано на фиг. 3. Например, в одном из вариантов реализации заявленного изобретения блок (130) ADAHRU соединен с прибором (174) контроля углового пространственного положения (который может быть реализован в резервной системе (170) индикации или нет) через одинарную шину (429) ARINC (обозначена позицией (180)). В этом случае первый процессор (131) объединяет решение AI со вторичным решением по угловому пространственному положению, полученным системой (136) AHRS, и передает оба решения одним пакетом через шину (429) ARINC. Это можно легко сделать таким методом, как циклический контроль избыточности (CRC) по блоку сообщений.
В одном из примеров реализации заявленного изобретения второй процессор (150) представляет собой внутренний процессор семейства ARM, специально предназначенный для вычисления параметров тангажа и крена с целью выработки решения AI. Программа, исполняемая вторым процессором (150), обеспечит независимое диверсифицированное решение AI, которое вычисляет крен и тангаж по данным из источника (154) данных для выработки решения по угловому пространственному положению. В одном из примеров осуществления настоящего изобретения программа, исполняемая системой (152) интегрирования данных об угловом пространственном положении, и прибор (174) контроля углового положения сохраняют минимальные значения, включая лишь то, что необходимо для выполнения функций отслеживания и выявления неисправностей, описанных в настоящем документе. Разбиение не требуется, так как имеется всего лишь одно приложение. Может быть выбрана или простая альтернативная операционная система, или простейший планировщик. В одном из примеров реализации заявленного изобретения для поддержания целостности решения AI предусмотрены минимально необходимые встроенные средства диагностики. В одном из примеров осуществления настоящего изобретения данные с инерциального датчика (145) могут передаваться на первый процессор (131) через отдельную SPI-шину, которая затем используется для передачи данных от источника (154) данных для выработки решения по угловому пространственному положению на второй процессор (150).
В одном из примеров практического применения заявленного изобретения для прибора контроля углового пространственного положения предусмотрено два набора первичных данных об угловом пространственном положении (с блоков (110) и (120) ADIRU), один набор вторичных данных об угловом пространственном положении (из системы (136) AHRS) и решения AI (из системы (152) интегрирования данных об угловом пространственном положении). Во время получения первичных данных об угловом пространственном положении с обоих блоков (110) и (120) ADIRU прибор (174) контроля углового пространственного положения остается в режиме ожидания, а решение AI из системы (152) интегрирования данных об угловом пространственном положении или игнорируется, или блокируется каким-либо иным образом (например, посредством перевода указанной системы (152) в режим ожидания указанным прибором (174) контроля). Как было отмечено выше, иногда может случиться так, что необходимо осуществить взлет или выполнить какой-либо маневр в полете при отказе или выходе из строй по иной причине блока (110) ADIRU или блока (120) ADIRU. Прибор (174) контроля углового пространственного положения распознает это состояние и активирует режим отслеживания углового пространственного положения. Давайте, к примеру, рассмотрим пример с выходом из строя блока (110) ADIRU. В этом случае прибор (174) контроля углового пространственного положения может зафиксировать отсутствие входящих первичных данных об угловом пространственном положении с блока (110) ADIRU (или же получить сигнал о нарушения связи или иной сигнал неисправности). Находясь в режиме отслеживания, прибор (174) контроля углового пространственного положения запускает процесс непрерывного отслеживания и сравнения первичных данных об угловом пространственном положении, получаемых с оставшегося в работе блока ADIRU (т.е. в блока (120) ADIRU в данном случае), и вторичных данных об угловом пространственном положении, поступающих из системы (136) AHRS. До тех пор, пока эти два массива данных об угловом пространственном положении согласуются друг с другом, прибор (174) контроля углового пространственного положения остается в режиме отслеживания. В режиме отслеживания решение AI по-прежнему игнорируется и не используется. Для некоторых вариантов осуществления настоящего изобретения такая ситуация сохраняется и в тех случаях, когда решение AI было заблокировано заранее, или система (152) интегрирования данных об угловом пространственном положении была переведена в режим ожидания иным образом, В других вариантах реализации заявленного изобретения, хотя решение AI по-прежнему остается неиспользуемым, система (152) интегрирования данных об угловом пространственном положении может быть активирована для генерирования решения AI в режиме отслеживания с тем, чтобы при необходимости обеспечить его наличие для прибора (174) контроля углового пространственного положения с минимальным временем ожидания.
Условие для начала использования решения AI возникает тогда, когда первичное решение по угловому пространственному положению, полученное с оставшегося в работе блока ADIRU, отличается от вторичного решения по угловому пространственному положению, сгенерированного системой (136) AHRS, на величину, превышающую заданное пороговое значение. Например, в одном из вариантов осуществления настоящего изобретения предусмотрено следующее: пока первичное решение по угловому пространственному положению с оставшегося в работе блока ADIRU не отличается от вторичного решения по угловому пространственному положению, сгенерированного системой (136) AHRS, более чем на 5° по углу тангажа или 10° по углу крена, прибор (174) контроля углового пространственного положения будет оставаться в режиме отслеживания. Однако если разница между первичным и вторичным решениями по угловому пространственному положению превысит указанные пороговые значения, или по углу тангажа, или по углу крена, то прибор контроля углового пространственного положения немедленно уведомит экипаж воздушного судна о рассогласовании (т.е. несоответствия) данных по угловому пространственному положению и перейдет в режим несоответствии данных по угловому пространственному положению. При выявлении рассогласования и перехода в указанный режим несоответствии прибор (174) контроля углового пространственного положения определяет, какое из двух решений по угловому пространственному положению - первичное решение, сгенерированное оставшимся в работе блоком ADIRU, или вторичное решение, сгенерированное системой (136) AHRS - в наибольшей степени отличается от решения AI. Это решение, характеризующееся наибольшим отклонением от решения AI, будет считаться ложным. После этого прибор (174) контроля углового пространственного положения локализует ложное решение, отображая на резервном индикаторе (172), какой канал выдает достоверные данные об угловом пространственном положении, а какой канал вышел из строя.
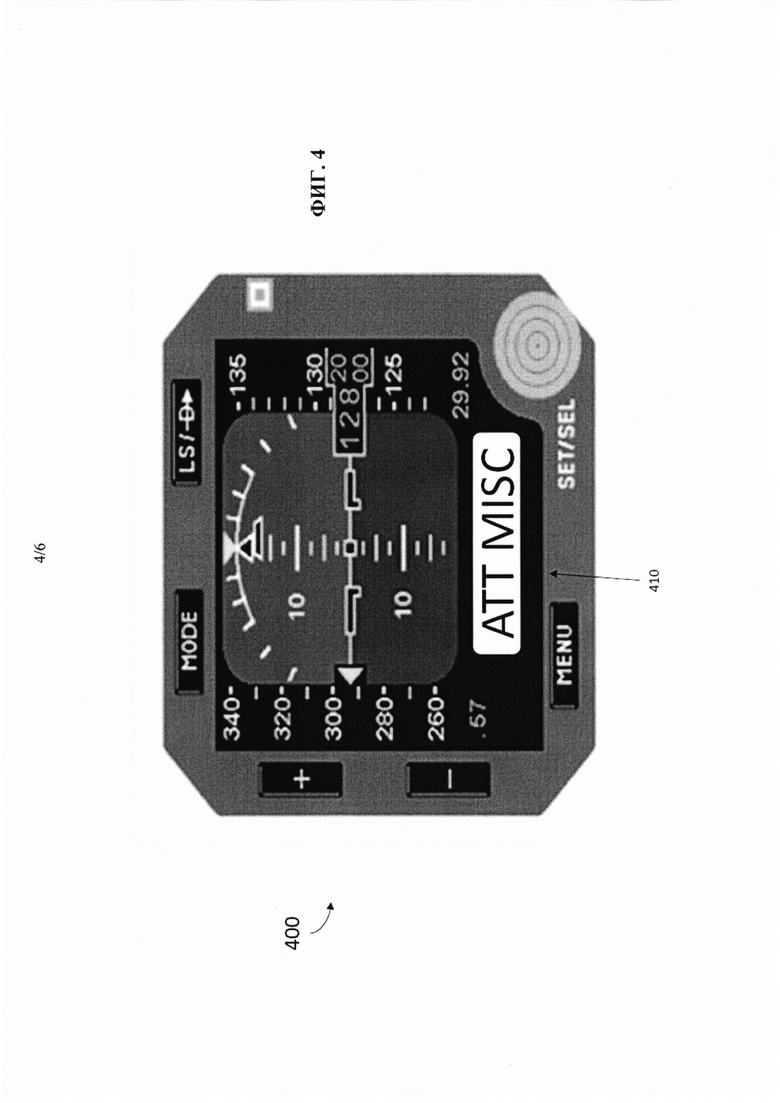
Например, на фиг. 4 проиллюстрирован экран (400) приборного индикатора резервной системы (172), показывающий, что прибор (174) контроля углового пространственного положения выявил рассогласование данных по угловому пространственному положению (позиция (410) «ATT MISC»), хотя указанный прибор (174) еще не установил, какое из решений является ложным. В некоторых вариантах реализации заявленного изобретения задержка времени между выявлением рассогласования, определяющим ложное решение, и оповещением о неисправности может быть равна нулю. Это происходит в том случае, если прибор (174) контроля углового пространственного положения получил все данные, необходимые для выполнения локализации. В других возможных вариантах реализации, например, в зависимости от типа датчиков, используемых в качестве источника (154) данных для выработки решений по угловому пространственному положению, может потребоваться выполнение самолетом определенного маневра для того, чтобы система (152) интегрирования данных об угловом пространственном положении могла выполнить самокалибровку и/или собрать данные, необходимые для точного вычисления решения AI. В этом случае на индикаторе (400) может быть отображено указание (позиция (410)) пилотам, какой маневр им следует выполнить, чтобы прибор (174) контроля углового пространственного положения мог выявить и локализовать вышедший из строя прибор.
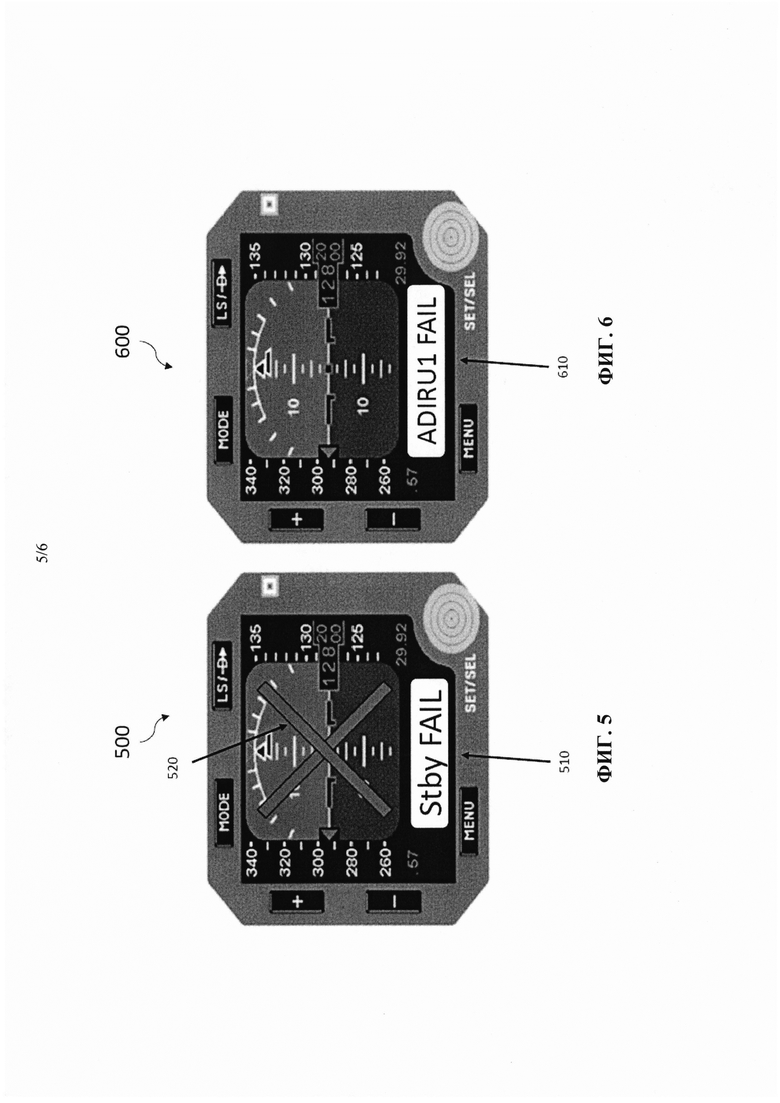
На фиг. 5 показан экран (500) приборного индикатора резервной системы (172), сообщающий пилотам, что прибор (174) контроля углового пространственного положения локализовал отказ по вторичным данным. Как видно на экране, система (172) сообщает пилотам, что вторичные данные по угловому пространственному положению, сгенерированные системой (136) AHRS, являются ложными (позиция (510) «Stby FAIL»). На экране (500) могут отображаться и иные символы, предупреждающие пилотов о недопустимости использования этого канала поступления данных об угловом пространственном положении, такие как крест, перечеркивающий весь экран, который обозначен позицией (520). На фиг. 6 показан экран (600) приборного индикатора резервной системы (172), сообщающий пилотам, что прибор (174) контроля углового пространственного положения локализовал отказ по первичным данным. Как видно на экране, экран (600) сообщает пилотам, что первичные данные по угловому пространственному положению, сгенерированные блоком (110) ADIRU, являются ложными (позиция (610) «ADIRU1 FAIL»). Следует отметить, что символы, представленные на фиг. 4, 5 и 6, являются условными и представлены лишь в качестве примера, и что может быть предусмотрена и иная символика, соответствующая конкретным вариантам реализации настоящего изобретения. Что касается информации и предупреждений, описанных выше и отображаемых резервной системой (172) индикации, следует иметь в виду, что в альтернативных вариантах осуществления настоящего изобретения любая такая информация в отношении ложного решения может отображаться как какой-либо одной системой индикации положения воздушного судна, основной или резервной, так и обеими этими системами.
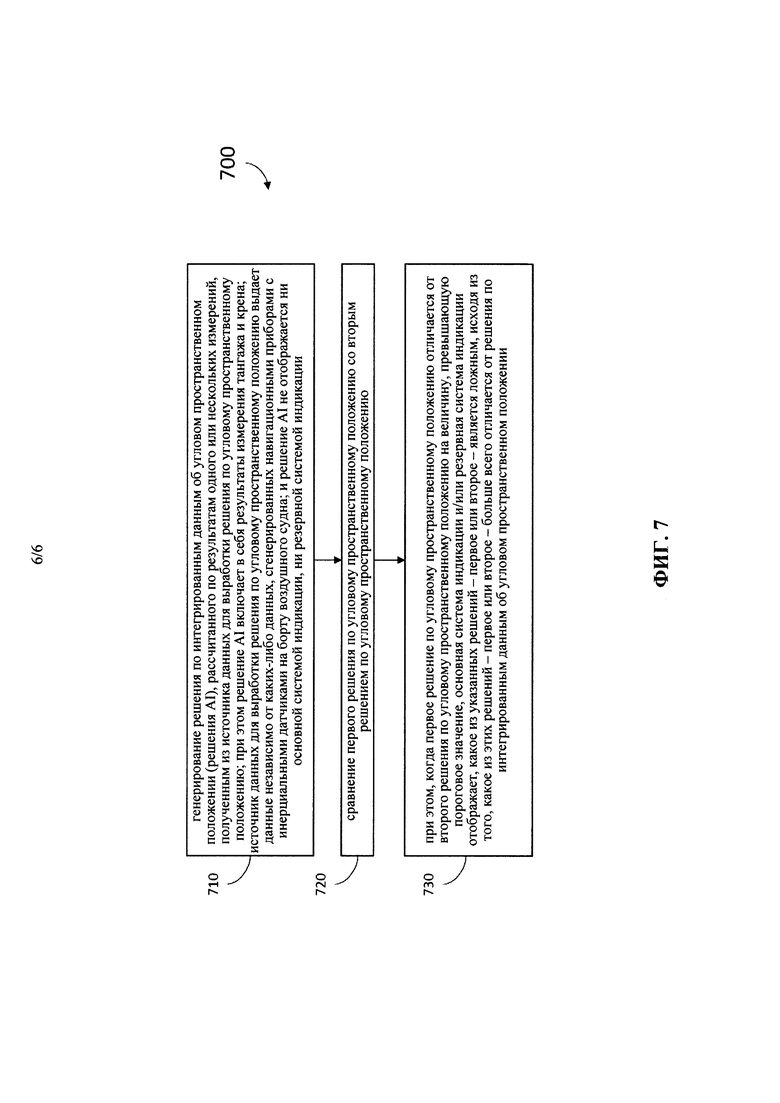
На фиг. 7 представлена блок-схема, иллюстрирующая способ (700) согласно одному из вариантов реализации заявленного изобретения, служащий для идентификации ложного решения по угловому пространственному положению воздушного судна, на борту которого предусмотрена основная система индикации, отображающая первое решение по угловому пространственному положению, и резервная система, отображающая второе решение по угловому пространственному положению. В одном из вариантов осуществления настоящего изобретения способ (700) может быть реализован с использованием системы (100) индикации углового пространственного положения, показанной на фиг. 1-3. В других вариантах осуществления настоящего изобретения вместо нее могут быть использованы другие системы индикации углового пространственного положения. В силу вышесказанного способ (700) предусматривает использование любого из элементов или процессов, альтернативных вариантов или опций, описанных выше в отношении любых вышеописанных вариантов реализации заявленного изобретения, как в целом, так и по отдельности, и наоборот.
Реализация способа (700) начинается со стадии (710) генерирования решения по интегрированным данным об угловом пространственном положении (решения AI), которое рассчитывается по результатам одного или нескольких измерений, полученным из источника данных для выработки решения по угловому пространственному положению; при этом решение AI включает в себя результаты измерения тангажа и крена; при этом источник данных для выработки решения по угловому пространственному положению выдает данные независимо от каких-либо навигационных данных, сгенерированных инерциальным датчиком навигационного класса на борту воздушного судна (т.е. навигационным прибором с инерциальным датчиком); и при этом решение AI не отображается ни основной системой индикации, ни резервной системой индикации. В вариантах осуществления настоящего изобретения используется относительно недорогой специализированный источник данных по угловому пространственному положению не навигационного класса, который предназначен, главным образом, для локализации опасно дезориентирующей информации, а не для выдачи данных об угловом пространственном положении, используемых для управления воздушным судном. Первичные и вторичные решения по угловому пространственному положению обязательно должны представлять собой решения навигационного класса, поскольку пилот принимает решения в отношении управления самолетом, исходя из данных о тангаже и крене по этим решениям. В одном из вариантов реализации заявленного изобретения первое решение по угловому пространственному положению является первичным решением, сгенерированным блоком воздушных сигналов и инерциальной системы (ADIRU), тогда как второе решение по угловому пространственному положению является вторичным решением, сгенерированным гибридным блоком воздушных сигналов и отсчета углового пространственного положения (ADAHRU).
В то же время решение по интегрированным данным об угловом пространственном положении (решение AI) должно быть всего лишь относительно точным для того, чтобы можно было получить приближенное решение по угловому пространственному положению, достаточное для выявления неисправности, как это было описано выше. Источник данных для выработки решения по угловому пространственному положению, выдающий данные, которые используются для генерирования решения по интегрированным данным об угловом пространственном положении (решения AI), может, соответственно, представлять собой относительно недорогой блок инерциальных датчиков не навигационного класса, таких как, к примеру, инерциальные датчики MEMS; или же включать в себя датчики или иные контрольно-измерительные приборы, выдающие результаты одного или нескольких измерений, а именно: инерциальных измерений, магнитометрических измерений, измерений с помощью ГНСС, измерений воздушных сигналов или иных подобных данных, по которым можно аппроксимировать угловое пространственное положение (тангаж и крен) воздушного судна, или их сочетаний. Использование таких источников для генерирования решения по интегрированным данным об угловом пространственном положении (решения AI) обходится эксплуатанту воздушного судна намного дешевле, чем установка и обслуживание какого-либо другого опорного блока управления угловым пространственным положением навигационного класса.
Далее указанный способ предусматривает переход к стадии (720), где первое решение по угловому пространственному положению сравнивается со вторым решением по угловому пространственному положению, и к стадии (730), на которой при отклонении первого решения по угловому пространственному положению от второго решения по угловому пространственному положению на величину, превышающую заданное пороговое значение, основной и/или резервной системой отображается, какое из указанных решений - первое или второе - является ложным, исходя из того, какое из этих решений - первое или второе - больше всего отличается от решения по интегрированным данным об угловом пространственном положении. Например, в одном из вариантов осуществления настоящего изобретения пока первое решение по угловому пространственному положению не отличается от второго решения по угловому пространственному положению более чем на 5° по углу тангажа или 10° по углу крена, продолжается выполнение стадии (720) указного способа. Однако если разница между указанными двумя решениями превысит указанные пороговые значения, или по углу тангажа, или по углу крена, то произойдет переход к стадии (730) описываемого способа. В одном из вариантов осуществления настоящего изобретения при выявлении рассогласования активируется режим несоответствии данных по угловому пространственному положению, и на стадии (730) описываемый способ вычисляет, какое из двух решений - первое решение по угловому пространственному положению или второе решение по угловому пространственному положению - в наибольшей степени отличается от решения AI. То решение, которое больше всего отличается от решения AI, признается ложным. После этого описываемый способ локализует ложное решение, отображая на резервном индикаторе, какой канал выдает ложные данные об угловом пространственном положении. В некоторых вариантах реализации заявленного изобретения описываемый способ может оказаться не в состоянии мгновенно определять ложные решения. Следовательно, в некоторых вариантах осуществления настоящего изобретения предусмотрено, что если на стадии (730) еще не определено, какое из решений по угловому пространственному положению - первое или второе - является ложным, то сначала прибор контроля углового пространственного положения отображает на экране резервной системы индикации предупреждение о несовпадении решений по угловому пространственному положению. В других возможных вариантах реализации, например, в зависимости от типа датчиков, используемых в качестве источника данных для выработки решений по угловому пространственному положению, может потребоваться выполнение самолетом определенного маневра для того, чтобы система интегрирования данных об угловом пространственном положении могла выполнить самокалибровку и/или собрать данные, необходимые для точного вычисления решения AI. В этом случае способ (700) предусматривает отображение указания пилотам на экране резервной системы индикации на то, какой маневр им следует выполнить, чтобы прибор контроля углового пространственного положения мог выявить и локализовать вышедший из строя прибор.
Примеры
Пример 1 включает в себя систему интегрирования и индикации данных об угловом пространственном положении, содержащую: основной опорный инерциальный блок, генерирующий первичное решение по угловому пространственному положению, которое рассчитывается - по меньшей мере, частично - в зависимости от инерциальных данных, полученных с первого инерциального датчика навигационного класса; основную систему индикации положения воздушного судна, соединенную с основным опорным инерциальным блоком, где указанная основная система индикации отображает первичное решение по угловому пространственному положению; гибридный опорный блок, генерирующий вторичное решение по угловому пространственному положению, которое рассчитывается - по меньшей мере, частично - в зависимости от инерциальных данных, полученных со второго инерциального датчика навигационного класса; резервную систему индикации положения воздушного судна, соединенную с гибридным опорным блоком, где указанная резервная система индикации отображает вторичное решение по угловому пространственному положению; систему интегрирования данных об угловом пространственном положении, генерирующую решение по интегрированным данным об угловом пространственном положении (решение AI), которое рассчитывается по результатам одного или нескольких измерений, полученным из источника данных для выработки решения по угловому пространственному положению, где указанный источник данных для выработки решения по угловому пространственному положению предоставляет данные независимо от первого инерциального датчика навигационного класса и второго инерциального датчика навигационного класса, а решение по интегрированным данным об угловом пространственном положении не отображается ни основной системой индикации, ни резервной системой индикации положения воздушного судна; и прибор контроля углового пространственного положения, соединенный с системой интегрирования данных об угловом пространственном положении; при этом в указанном приборе контроля предусмотрен режим отслеживания, в котором указанный прибор контроля сравнивает первичное решение по угловому пространственному положению со вторичным решением по угловому пространственному положению; при этом, когда первичное решение по угловому пространственному положению отличается от вторичного решения по угловому пространственному положению на величину, превышающую пороговое значение, прибор контроля углового пространственного положения идентифицирует первичное решение или вторичное решение по угловому пространственному положению как ложное, исходя из того, какое из этих решений - первичное или вторичное - характеризуется большим отклонением от решения по интегрированным данным об угловом пространственном положении; при этом прибор контроля углового пространственного положения передает предупреждение о ложном решении или на одну из систем индикации - основную или резервную - или на обе указанные системы.
Пример 2 включает в себя систему по примеру 1, где основной опорный инерциальный блок представляет собой блок воздушных сигналов и инерциальной системы (ADIRU).
Пример 3 включает в себя систему по примерам 1 и 2, где гибридный опорный блок представляет собой гибридный блок воздушных сигналов и отсчета углового пространственного положения (ADAHRU).
Пример 4 включает в себя систему по любому из предшествующих примеров 1-3, где гибридный опорный блок содержит первый процессор и второй процессор; при этом вторичное решение по угловому пространственному положению рассчитывается навигационной системой определения курса и углового пространственного положения (AHRS), реализованной на первом процессоре; а система интегрирования данных об угловом пространственном положении реализована на втором процессоре.
Пример 5 включает в себя систему по примеру 4, где решение AI передается вторым процессором на первый процессор; при этом первый процессор объединяет решение AI со вторичным решением по угловому пространственному положению в один или несколько пакетов данных, которые передаются на прибор контроля углового пространственного положения.
Пример 6 включает в себя систему по любому из предшествующих примеров 1-5, где источник данных для выработки решения по угловому пространственному положению выдает результаты одного или нескольких измерений, а именно: инерциальных измерений, магнитометрических измерений, измерений с помощью ГНСС, измерений воздушных сигналов или их сочетаний.
Пример 7 включает в себя систему по любому из предшествующих примеров 1-6, где прибор контроля углового пространственного положения входит в режим отслеживания, когда основной опорный инерциальный блок остается единственным оставшимся в работе основным опорным инерциальным блоком из множества основных опорных инерциальных блоков.
Пример 8 включает в себя систему по любому из предшествующих примеров 1-7, где при отклонении первичного решения по угловому пространственному положению от вторичного решения по угловому пространственному положению на величину, превышающую заданное пороговое значение, прибором контроля углового пространственного положения еще не выявлено ложное решение, указанный прибор контроля выдает предупреждение о том, что между двумя решениями по угловому пространственному положению наблюдается рассогласование.
Пример 9 включает в себя систему по любому из предшествующих примеров 1-8, где при отклонении первичного решения по угловому пространственному положению от вторичного решения по угловому пространственному положению на величину, превышающую заданное пороговое значение, прибор контроля углового пространственного положения генерирует указание пилоту на выполнение самолетом определенного маневра.
Пример 10 включает в себя систему интегрирования и индикации данных об угловом пространственном положении воздушного судна, содержащую: систему индикации, включающую в себя основную систему индикации положения воздушного судна, предназначенную для отображения первого решения по угловому пространственному положению, и резервную систему индикации положения воздушного судна, предназначенную для отображения второго решения по угловому пространственному положению; систему интегрирования данных об угловом пространственном положении, генерирующую решение по интегрированным данным об угловом пространственном положении (решение AI), которое рассчитывается по результатам одного или нескольких измерений, полученным из источника данных для выработки решения по угловому пространственному положению, где решение AI содержит результаты измерения тангажа и крена воздушного судна, где источник данных для выработки решения по угловому пространственному положению предоставляет данные независимо от данных, сгенерированных навигационными приборами с инерциальными датчиками на борту воздушного судна, и где решение AI не отображается ни основной системой индикации, ни резервной системой индикации; и прибор контроля углового пространственного положения, соединенный с системой интегрирования данных об угловом пространственном положении, где указанный прибор сравнивает первое решение по угловому пространственному положению со вторым решением по угловому пространственному положению; при этом, когда первое решение по угловому пространственному положению отличается от второго решения по угловому пространственному положению на величину, превышающую пороговое значение, прибор контроля углового пространственного положения отображает в системе индикации, какое из решений по угловому пространственному положению первое или второе - является ложным, исходя из того, какое из этих решений - первичное или вторичное - характеризуется большим отклонением от решения по интегрированным данным об угловом пространственном положении.
Пример 11 включает в себя систему по примеру 10, где основной опорный инерциальный блок представляет собой блок воздушных сигналов и инерциальной системы (ADIRU).
Пример 12 включает в себя систему по любому из предшествующих примеров 10-11, где гибридный опорный блок представляет собой гибридный блок воздушных сигналов и отсчета углового пространственного положения (ADAHRU).
Пример 13 включает в себя систему по любому из предшествующих примеров 10-12, где при отклонении первичного решения по угловому пространственному положению от вторичного решения по угловому пространственному положения на величину, превышающую заданное пороговое значение, еще не определено, какое из указанных решений - первое или второе - является ложным, прибор контроля углового пространственного положения сначала выдает предупреждение о том, что между двумя решениями по угловому пространственному положению наблюдается рассогласование.
Пример 14 включает в себя систему по любому из предшествующих примеров 10-13, где источник данных для выработки решения по угловому пространственному положению выдает результаты одного или нескольких измерений, таких как инерциальные измерения, магнитометрические измерения, измерения с помощью ГНСС, измерения воздушных сигналов или их сочетания.
Пример 15 включает в себя систему по любому из предшествующих примеров 10-14, где при отклонении первичного решения по угловому пространственному положению от вторичного решения по угловому пространственному положению на величину, превышающую заданное пороговое значение, прибор контроля углового пространственного положения отображает указание пилоту на выполнение самолетом определенного маневра.
Пример 16 включает в себя способ определения ложного решения в отношении углового пространственного положения воздушного судна, характеризующийся использованием первичной системы индикации для отображения первичного решения в отношении углового пространственного положения воздушного судна и резервной системы индикации для отображения вторичного решения в отношении углового пространственного положения воздушного судна, включающий в себя следующие стадии: генерирование решения по интегрированным данным об угловом пространственном положении (решение AI), которое рассчитывается по результатам одного или нескольких измерений, полученным из источника данных для выработки решения по угловому пространственному положению, где решение AI включает в себя результаты измерения тангажа и крена, где источник данных для выработки решения по угловому пространственному положению выдает информацию, не зависящую от каких-либо навигационных данных, сгенерированных навигационными приборами с инерциальными датчиками на борту воздушного судна, и где решение AI не отображается ни основной системой индикации, ни резервной системой индикации; сравнение первого решения по угловому пространственному положению со вторым решением по угловому пространственному положению; и, когда первое решения по угловому пространственному положению отличается от второго решения по угловому пространственному положению на величину, превышающую заданное пороговое значение, отображение основной системой индикации и/или резервной системой индикации, какое из указанных решений - первое или второе - является ложным, исходя из того, какое из этих решений - первое или второе - больше всего отличается от решения по интегрированным данным об угловом пространственном положении.
Пример 17 включает в себя способ по примеру 16, где первое решение в отношении углового пространственного положения является первичным решением в отношении углового пространственного положения, сгенерированным блоком воздушных сигналов и инерциальной системы (ADIRU).
Пример 18 включает в себя способ по любому из предшествующих примеров 16-17, где второе решение в отношении углового пространственного положения, является вторичным решением в отношении углового пространственного положения, сгенерированным гибридным опорным блоком воздушных сигналов и отсчета углового пространственного положения (ADAHRU).
Пример 19 включает в себя способ по любому из предшествующих примеров 16-18, где при отклонении первого решения по угловому пространственному положению от второго решения по угловому пространственному положения на величину, превышающую заданное пороговое значение, не определено, какое из указанных решений - первое или второе - является ложным, прибор контроля углового пространственного положения сначала выдает предупреждение о том, что между двумя решениями по угловому пространственному положению наблюдается рассогласование.
Пример 20 включает в себя способ по любому из предшествующих примеров 16-19, где источник данных для выработки решения по угловому пространственному положению выдает результаты одного или нескольких измерений, таких как инерциальные измерения, магнитометрические измерения, измерения с помощью ГНСС, измерения воздушных сигналов или их сочетания.
В различных альтернативных вариантах осуществления настоящего изобретения системные элементы, процессы или примеры, описанные в настоящем документе, такие как, помимо прочего, система интегрирования данных об угловом пространственном положении или прибор контроля углового пространственного положения, могут быть реализованы в одной или нескольких вычислительных системах, на программируемой пользователем матрице логических элементов типа FPGA или иных подобных устройствах, содержащих процессор, исполняющий код с целью реализации этих элементов, процессов или примеров; при этом указанный код храниться в энергонезависимом устройстве хранения данных. Соответственно, прочие варианты осуществления настоящего изобретения могут включать элементы, содержащие программные команды, установленные на машиночитаемых носителях, которые при их исполнении такими вычислительными системами позволяют реализовывать варианты осуществления заявленного изобретения, описанные в настоящем документе. В контексте представленной заявки термин «машиночитаемый носитель» относится к материальному устройству хранения данных, обладающему неизменяемой физической формой. К таким неизменяемым физическим устройствам относятся, помимо прочего, перфорационные карты, магнитные диски или ленты, любые оптические системы хранения данных, постоянная флэш-память (ПЗУ), энергонезависимые ПЗУ, программируемые ПЗУ (ППЗУ), стираемые программируемые постоянные запоминающие устройства (СППЗУ), оперативные запоминающие устройства (ОЗУ) или иные типы постоянных, полупостоянных и временных запоминающих устройств и систем, обладающих физической, материальной формой. Программные команды включают в себя, помимо прочего, исполняемые компьютером команды, которые выполняются процессорами вычислительной системы и языками описания аппаратных средств, такими как язык описания аппаратного обеспечения на быстродействующих ИС (язык VHDL).
Хотя в настоящем документе описаны и проиллюстрированы конкретные варианты осуществления настоящего изобретения, любому специалисту в данной области техники понятно, что проиллюстрированный конкретный вариант реализации заявленного изобретения может быть заменен любой иной схемой, рассчитанной для достижения той же цели. Настоящая заявка, как предполагается, распространяется на любые изменения или модификации заявленного изобретения. Таким образом, явным образом предполагается, что настоящее изобретение ограничено лишь пунктами формулы изобретения и их эквивалентами.

Группа изобретений относится к двум системам интегрирования и индикации данных об угловом пространственном положении и способу определения ложного решения в отношении углового пространственного положения воздушного судна. Система по первому варианту содержит основной опорный инерциальный блок, гибридный опорный блок, а также обе системы содержат основную систему индикации положения воздушного судна, резервную систему индикации положения воздушного судна, систему интегрирования данных об угловом пространственном положении, прибор контроля углового пространственного положения. Для определения ложного решения в отношении углового пространственного положения воздушного судна генерируют решения по интегрированным данным об угловом пространственном положении, которое рассчитывается по результатам одного или нескольких измерений, полученным из источника данных для выработки решения по угловому пространственному положению, сравнивают первое решение по угловому пространственному положению со вторым решением по угловому пространственному положению, и когда первое решения по угловому пространственному положению отличается от второго решения по угловому пространственному положению на величину, превышающую заданное пороговое значение, отображают основной системой индикации и/или резервной системой индикации, какое из указанных решений - первое или второе - является ложным, исходя из того, какое из этих решений - первое или второе - больше всего отличается от решения по интегрированным данным об угловом пространственном положении. Обеспечивается локализация отказов при определении углового пространственного положения воздушного судна. 3 н. и 17 з.п. ф-лы, 7 ил.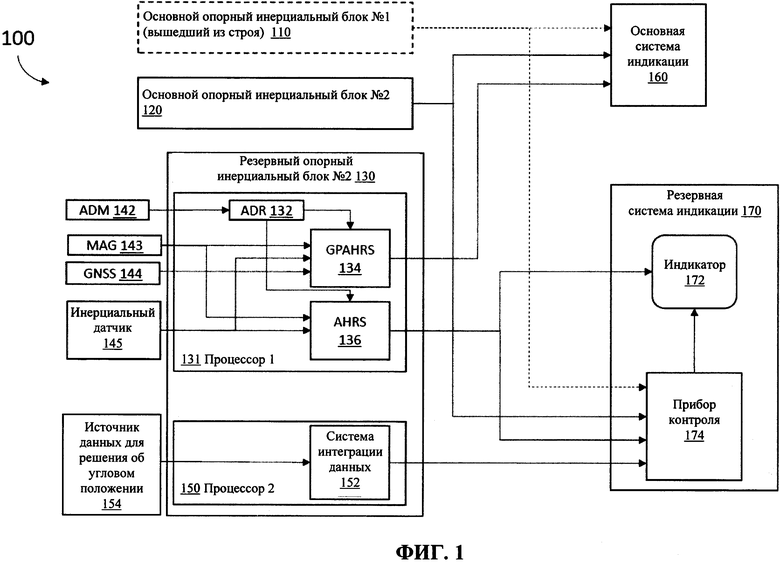
1. Система интегрирования и индикации данных об угловом пространственном положении, содержащая:
основной опорный инерциальный блок, генерирующий первичное решение по угловому пространственному положению, которое рассчитывается - по меньшей мере частично - в зависимости от инерциальных данных, полученных с первого инерциального датчика навигационного класса;
основную систему индикации положения воздушного судна, соединенную с основным опорным инерциальным блоком; при этом указанная основная система индикации отображает первичное решение по угловому пространственному положению;
гибридный опорный блок, генерирующий вторичное решение по угловому пространственному положению, которое рассчитывается - по меньшей мере частично - в зависимости от инерциальных данных, полученных со второго инерциального датчика навигационного класса;
резервную систему индикации положения воздушного судна, соединенную с гибридным опорным блоком, при этом указанная резервная система индикации отображает вторичное решение по угловому пространственному положению;
систему интегрирования данных об угловом пространственном положении, генерирующую решение по интегрированным данным об угловом пространственном положении (решение AI), которое рассчитывается по результатам одного или нескольких измерений, полученным из источника данных для выработки решения по угловому пространственному положению, при этом источник данных для выработки решения по угловому пространственному положению предоставляет данные независимо от первого инерциального датчика навигационного класса и второго инерциального датчика навигационного класса, а решение по интегрированным данным об угловом пространственном положении не отображается ни основной системой индикации, ни резервной системой индикации положения воздушного судна; и
прибор контроля углового пространственного положения, соединенный с системой интегрирования данных об угловом пространственном положении, при этом в указанном приборе контроля предусмотрен режим отслеживания, в котором указанный прибор контроля сравнивает первичное решение по угловому пространственному положению со вторичным решением по угловому пространственному положению;
при этом когда первичное решение по угловому пространственному положению отличается от вторичного решения по угловому пространственному положению на величину, превышающую пороговое значение, прибор контроля углового пространственного положения идентифицирует первичное решение или вторичное решение по угловому пространственному положению как ложное, исходя из того, какое из этих решений - первичное или вторичное - характеризуется большим отклонением от решения по интегрированным данным об угловом пространственном положении;
при этом прибор контроля углового пространственного положения передает предупреждение о ложном решении или на одну из систем индикации - основную или резервную - или на обе указанные системы.
2. Система по п. 1, в которой основной опорный инерциальный блок представляет собой блок воздушных сигналов и инерциальной системы (ADIRU).
3. Система по п. 1, в которой гибридный опорный блок представляет собой гибридный блок воздушных сигналов и отсчета углового пространственного положения (ADAHRU).
4. Система по п. 1, в которой гибридный опорный блок содержит первый процессор и второй процессор, при этом вторичное решение по угловому пространственному положению рассчитывается навигационной системой определения курса и углового пространственного положения (AHRS), реализованной на первом процессоре; и
при этом система интегрирования данных об угловом пространственном положении реализована на втором процессоре.
5. Система по п. 4, в которой решение AI передается вторым процессором на первый процессор, при этом первый процессор объединяет решение AI со вторичным решением по угловому пространственному положению в один или несколько пакетов данных, которые передаются на прибор контроля углового пространственного положения.
6. Система по п. 1, в которой источник данных для выработки решения по угловому пространственному положению выдает результаты одного или нескольких измерений, а именно:
инерциальных измерений, магнитометрических измерений, измерений с помощью ГНСС, измерений воздушных сигналов или их сочетаний.
7. Система по п. 1, в которой прибор контроля углового пространственного положения входит в режим отслеживания, когда основной опорный инерциальный блок остается единственным оставшимся в работе основным опорным инерциальным блоком из множества основных опорных инерциальных блоков.
8. Система по п. 1, в которой при отклонении первичного решения по угловому пространственному положению от вторичного решения по угловому пространственному положению на величину, превышающую заданное пороговое значение, прибором контроля углового пространственного положения еще не выявлено ложное решение, указанный прибор контроля выдает предупреждение о том, что между двумя решениями по угловому пространственному положению наблюдается рассогласование.
9. Система по п. 1, в которой при отклонении первичного решения по угловому пространственному положению от вторичного решения по угловому пространственному положению на величину, превышающую заданное пороговое значение, прибор контроля углового пространственного положения генерирует указание пилоту на выполнение самолетом определенного маневра.
10. Система интегрирования и индикации данных об угловом пространственном положении воздушного судна, содержащая:
систему индикации, включающую в себя основную систему индикации положения воздушного судна, предназначенную для отображения первого решения по угловому пространственному положению, и резервную систему индикации положения воздушного судна, предназначенную для отображения второго решения по угловому пространственному положению;
систему интегрирования данных об угловом пространственном положении, генерирующую решение по интегрированным данным об угловом пространственном положении (решение AI), которое рассчитывается по результатам одного или нескольких измерений, полученным из источника данных для выработки решения по угловому пространственному положению, при этом решение AI содержит результаты измерения тангажа и крена воздушного судна, при этом источник данных для выработки решения по угловому пространственному положению предоставляет данные независимо от данных, сгенерированных навигационными приборами с инерциальными датчиками на борту воздушного судна, и при этом решение AI не отображается ни основной системой индикации, ни резервной системой индикации; и
прибор контроля углового пространственного положения, соединенный с системой интегрирования данных об угловом пространственном положении, при этом указанный прибор сравнивает первое решение по угловому пространственному положению со вторым решением по угловому пространственному положению, при этом когда первое решение по угловому пространственному положению отличается от второго решения по угловому пространственному положению на величину, превышающую пороговое значение, прибор контроля углового пространственного положения отображает в системе индикации, какое из решений по угловому пространственному положению - первое или второе - является ложным, исходя из того, какое из этих решений - первичное или вторичное - характеризуется большим отклонением от решения по интегрированным данным об угловом пространственном положении.
11. Система по п. 10, в которой основной опорный инерциальный блок представляет собой блок воздушных сигналов и инерциальной системы (ADIRU).
12. Система по п. 10, в которой гибридный опорный блок представляет собой блок воздушных сигналов и отсчета углового пространственного положения (ADAHRU).
13. Система по п. 10, в которой при отклонении первичного решения по угловому пространственному положению от вторичного решения по угловому пространственному положения на величину, превышающую заданное пороговое значение, еще не определено, какое из указанных решений - первое или второе - является ложным, прибор контроля углового пространственного положения сначала выдает предупреждение о том, что между двумя решениями по угловому пространственному положению наблюдается рассогласование.
14. Система по п. 10, в которой источник данных для выработки решения по угловому пространственному положению выдает результаты одного или нескольких измерений, таких как инерциальные измерения, магнитометрические измерения, измерения с помощью ГНСС, измерения воздушных сигналов или их сочетания.
15. Система по п. 10, в которой при отклонении первичного решения по угловому пространственному положению от вторичного решения по угловому пространственному положению на величину, превышающую заданное пороговое значение, прибор контроля углового пространственного положения отображает указание пилоту на выполнение самолетом определенного маневра.
16. Способ определения ложного решения в отношении углового пространственного положения воздушного судна, характеризующийся использованием первичной системы индикации для отображения первичного решения в отношении углового пространственного положения воздушного судна и резервной системы индикации для отображения вторичного решения в отношении углового пространственного положения воздушного судна, включающий в себя следующие стадии:
генерирование решения по интегрированным данным об угловом пространственном положении (решение AI), которое рассчитывается по результатам одного или нескольких измерений, полученным из источника данных для выработки решения по угловому пространственному положению, при этом решение AI включает в себя результаты измерения тангажа и крена, при этом источник данных для выработки решения по угловому пространственному положению выдает информацию, не зависящую от каких-либо навигационных данных, сгенерированных навигационными приборами с инерциальными датчиками на борту воздушного судна, и при этом решение AI не отображается ни основной системой индикации, ни резервной системой индикации;
сравнение первого решения по угловому пространственному положению со вторым решением по угловому пространственному положению; и
когда первое решения по угловому пространственному положению отличается от второго решения по угловому пространственному положению на величину, превышающую заданное пороговое значение, отображение основной системой индикации и/или резервной системой индикации, какое из указанных решений - первое или второе - является ложным, исходя из того, какое из этих решений - первое или второе - больше всего отличается от решения по интегрированным данным об угловом пространственном положении.
17. Способ по п. 16, в котором первое решение в отношении углового пространственного положения является первичным решением в отношении углового пространственного положения, сгенерированным блоком воздушных сигналов и инерциальной системы (ADIRU).
18. Способ по п. 16, в котором второе решение в отношении углового пространственного положения является вторичным решением в отношении углового пространственного положения, сгенерированным гибридным опорным блоком воздушных сигналов и отсчета углового пространственного положения (ADAHRU).
19. Способ по п. 16, в котором при отклонении первого решения по угловому пространственному положению от второго решения по угловому пространственному положения на величину, превышающую заданное пороговое значение, не определено, какое из указанных решений - первое или второе - является ложным, прибор контроля углового пространственного положения сначала выдает предупреждение о том, что между двумя решениями по угловому пространственному положению наблюдается рассогласование.
20. Способ по п. 16, в котором источник данных для выработки решения по угловому пространственному положению выдает результаты одного или нескольких измерений, таких как инерциальные измерения, магнитометрические измерения, измерения с помощью ГНСС, измерения воздушных сигналов или их сочетания.
| ИНТЕГРИРОВАННЫЙ АВИАЦИОННЫЙ МНОГОФУНКЦИОНАЛЬНЫЙ ИНДИКАТОР | 2010 |
|
RU2441813C2 |
| ИНФОРМАЦИОННО-УПРАВЛЯЮЩАЯ СИСТЕМА МНОГОФУНКЦИОНАЛЬНОГО ЛЕТАТЕЛЬНОГО АППАРАТА | 2011 |
|
RU2476920C1 |
| US 6782742 B1, 31.08.2004 | |||
| US 822606 B2, 24.07.2012 | |||
| US 20140019038 A1, 16.01.2014. | |||

