Ссылки на родственные заявки
По настоящей заявке испрашиваются приоритет в соответствии с предварительной заявкой на выдачу патента США №62/061787, озаглавленной «СИСТЕМЫ И СПОСОБЫ СОЗДАНИЯ ДВУХ НЕЗАВИСИМЫХ НЕОДИНАКОВЫХ ВЕЛИЧИН ПРОСТРАНСТВЕННОГО ПОЛОЖЕНИЯ, ДВУХ НЕЗАВИСИМЫХ НЕОДИНАКОВЫХ ИНЕРЦИАЛЬНЫХ ВЕЛИЧИН ИЛИ И ТОГО, И ДРУГОГО С ПОМОЩЬЮ ОДНОГО УСОВЕРШЕНСТВОВАННОГО НАВИГАЦИОННОГО УСТРОЙСТВА», поданной 9 октября 2014 года, полное содержание которой включено в настоящую заявку посредством ссылки.
Уровень техники
В воздушных судах используют навигационные устройства, обеспечивающие вывод на различные дисплеи и системы воздушного судна величин пространственного положения (например, информации об угле тангажа, угле крена и курсе) и инерциальных величин (например, ускорения и угловых скоростей, по которым можно определить вектор скорости). Для обеспечения определенной степени надежности в случае отказа оборудования некоторые из таких навигационных устройств делают резервированными и предусматривают подтверждение корректности показаний приборов. Диспетчеризация воздушного судна также иногда зависит от наличия резервированных навигационных устройств, обеспечивающих доступ к величинам пространственного положения и инерциальным величинам. В общепринятых вариантах реализации для обеспечения резервированных результатов измерения используют несколько устройств.
Во многих типовых вариантах реализации для обеспечения резервированных результатов измерения используют три блока совмещения воздушных сигналов и инерциальной системы отсчета (ADIRU, от англ. air data inertial reference unit). Однако есть потребность в замене одного из блоков ADIRU навигационным блоком другого типа, таким как система определения курса и пространственного положения (курсовертикаль или AHRS, от англ. attitude heading reference system) с коррекцией по системе глобального позиционирования (GPS, от англ. global positioning system). При таком преобразовании также есть потребность в наличии возможности диспетчеризации в случае отказа одного из блоков ADIRU. Однако, если оставшийся блок ADIRU и курсовертикаль (AHRS) с коррекцией по системе GPS выдают две вычисленные независимые неодинаковые величины пространственного положения, две вычисленные независимые неодинаковые инерциальные величины или и то, и другое, то невозможно определить, которым из устройств - оставшимся блоком ADIRU или курсовертикалью (AHRS) с коррекцией по системе GPS - вычислена ошибочная величина пространственного положения.
Ввиду вышеуказанных и нижеприведенных причин, которые будут понятны специалисту в области техники при прочтении и усвоении информации, изложенной в настоящей заявке, актуальна задача создания усовершенствованных систем и способов определения ошибочного значения рассогласования по величине пространственного положения в системе, в которой используется сочетание навигационных блоков разных типов.
Сущность изобретения
В соответствии с вариантами осуществления настоящего изобретения предлагаются системы и способы создания двух независимых неодинаковых величин пространственного положения, двух независимых неодинаковых инерциальных величин или и того, и другого с помощью одного усовершенствованного навигационного устройства.
В соответствии с вариантом осуществления изобретения система бортового авиационного оборудования содержит: инерциальное навигационное устройство, выполненное с возможностью создания первой группы величин пространственного положения; курсовертикаль, выполненную с возможностью создания первичной группы величин пространственного положения и вторичной группы величин пространственного положения; и устройство отображения, выполненное с возможностью приема первой группы величин пространственного положения, первичной группы величин пространственного положения и вторичной группы величин пространственного положения, причем если разница между первой группой величин пространственного положения и первичной группой величин пространственного положения превышает пороговое значение, то устройство отображения определяет, которая из первой группы величин пространственного положения и первичной группы величин пространственного положения верна путем выявления, меньше ли порогового значения разница между первой группой величин пространственного положения и вторичной группой величин пространственного положения или меньше ли порогового значения разница между первичной группой величин пространственного положения и вторичной группой величин пространственного положения.
Краткое описание чертежей
Следует понимать, что на фигурах представлены только приведенные для примера варианты осуществления настоящего изобретения, которые, таким образом, не ограничивают объем настоящего изобретения и описаны с дополнительными подробностями и конкретикой со ссылками на прилагаемые фигуры.
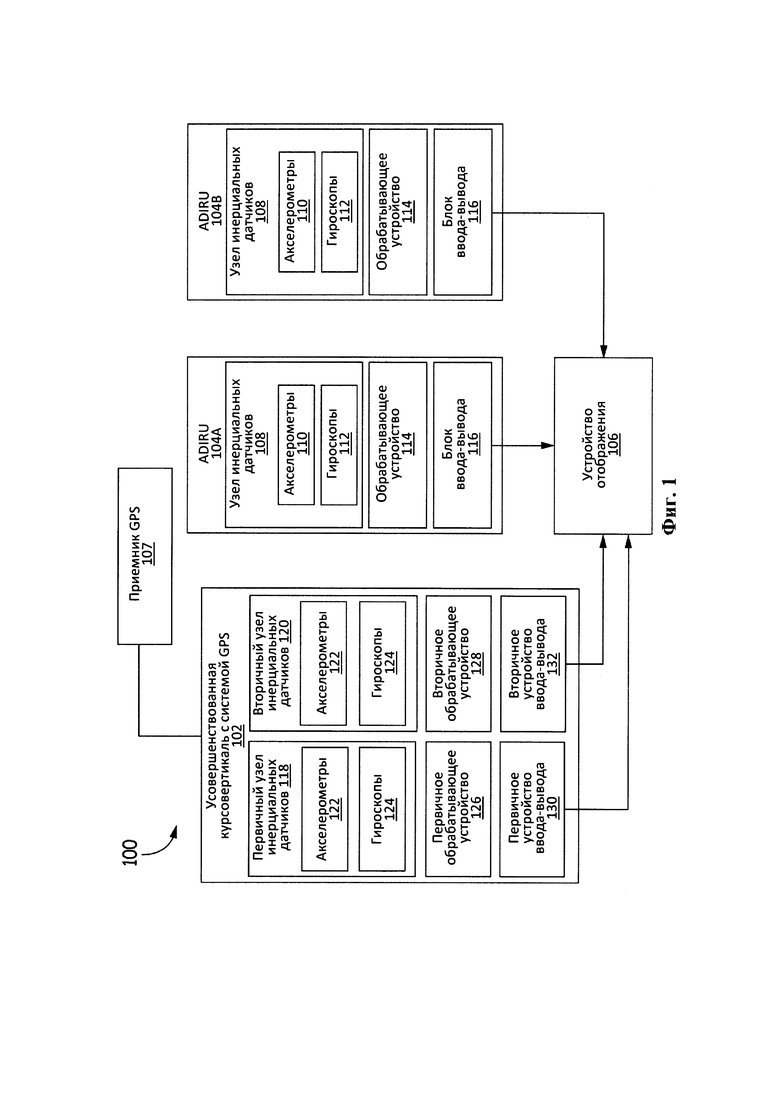
На фиг. 1 представлена блок-схема примера системы бортового авиационного оборудования, содержащей усовершенствованную курсовертикаль (AHRS) с коррекцией по системе GPS, которая может обеспечивать две независимые неодинаковые величины пространственного положения, две независимые неодинаковые инерциальные величины или и то, и другое.
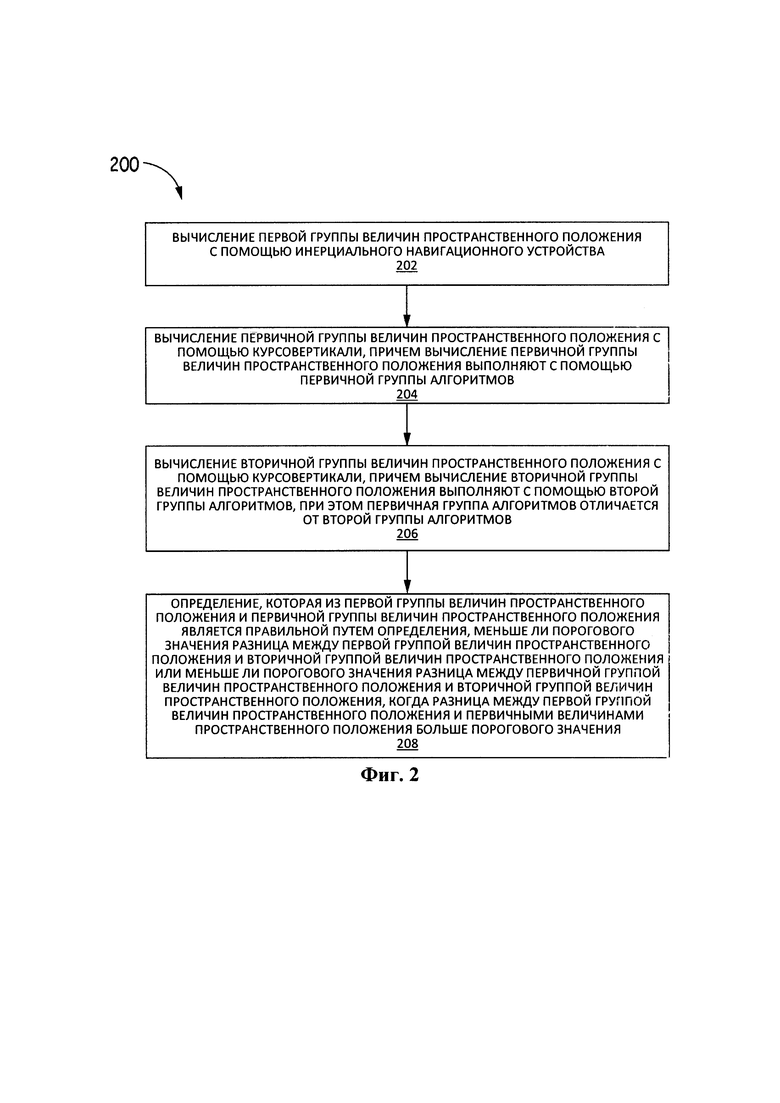
На фиг. 2 проиллюстрирован способ создания двух независимых неодинаковых величин пространственного положения, двух независимых неодинаковых инерциальных величин или и того, и другого с помощью одного усовершенствованного навигационного устройства.
В соответствии с общепринятой практикой изображения различных описанных элементов приведены не в масштабе и предназначены для акцентирования внимания на конкретных элементах, относящихся к приведенным для примера вариантам осуществления изобретения.
Подробное описание изобретения
Нижеследующее подробное описание дано со ссылками на прилагаемые фигуры, которые являются его частью и приведены для пояснения конкретных вариантов осуществления изобретения. При этом следует понимать, что могут быть использованы другие варианты осуществления изобретения и могут быть внесены изменения в логические, механические и электрические элементы. Кроме того, способ, проиллюстрированный на фигурах, и описание не ограничиваются порядком следования отдельных стадий, в котором они могут быть выполнены. Таким образом, нижеприведенное подробное описание не является ограничивающим.
В соответствии с вариантами осуществления настоящего изобретения обеспечивается возможность определения ошибочного значения рассогласования по величине пространственного положения в навигационной системе, в которой используется сочетание навигационных блоков разных типов в случае отказа одного из первых навигационных блоков. Как сказано выше, существует потребность в использовании на воздушном судне только двух блоков ADIRU и одной курсовертикали (AHRS) с коррекцией по системе GPS. При такой конфигурации в случае отказа одного из блоков ADIRU, при том что показания о величине пространственного положения по оставшемуся блоку ADIRU и курсовертикали (AHRS) с коррекцией по системе GPS не совпадают, невозможно определить, которая из величин пространственного положения верна. В соответствии с вариантами осуществления изобретения, раскрытыми в настоящем документе, предлагается решение этой проблемы. В частности, вышеупомянутая курсовертикаль (AHRS) с коррекцией по системе GPS заменена на усовершенствованную курсовертикаль (AHRS) с коррекцией по системе GPS, обеспечивающую вычисление дополнительной группы неодинаковых параметров пространственного положения. Эти неодинаковые параметры пространственного положения дают возможность определить, которая из двух величин не верна.
На фиг. 1 представлена блок-схема примера системы 100 бортового авиационного оборудования, содержащая усовершенствованную курсовертикаль (AHRS) 102 с коррекцией по системе GPS, выполненную с возможностью обеспечения двух независимых неодинаковых величин пространственного положения, двух независимых неодинаковых инерциальных величин или и того, и другого. Система 100 также содержит два блока ADIRU 104А, 104В, устройство 106 отображения и приемник 107 GPS. Показаны три навигационных блока 102, 104А, 104В, однако на воздушном судне, в зависимости от его вида, может быть установлено больше или меньше навигационных блоков. Кроме того, поскольку система 100 содержит по меньшей мере одну усовершенствованную курсовертикаль (AHRS) 102 с коррекцией по системе GPS, в эту систему могут быть включены навигационные устройства различных типов.
Как показано на фиг. 1, блоки ADIRU 104А, 104В содержат узел 108 инерциальных датчиков. Узел 108 инерциальных датчиков содержит акселерометры 110 и гироскопы 112. В соответствии с некоторыми вариантами осуществления изобретения в каждый узел 108 инерциальных датчиков включены три гироскопа 112 и три акселерометра 110. Однако в узел 108 инерциальных датчиков может быть включено больше или меньше гироскопов 112 и акселерометров 110. Блоки ADIRU 104А, 104В также содержат обрабатывающее устройство 114, выполненное с возможностью приема инерциальных данных от узла 108 инерциальных датчиков и обеспечения величин пространственного положения и инерциальных величин на основе принятых инерциальных данных. Кроме того, блоки ADIRU 104А, 104В содержат блок 116 ввода-вывода (I/O, от англ. input/output), соединенный с обрабатывающим устройством 114 с возможностью передачи данных. Блок 116 ввода-вывода (I/O) выполнен с возможностью приема величин пространственного положения и инерциальных величин, вычисленных обрабатывающим устройством 114, и передачи величин пространственного положения и инерциальных величин в другие системы воздушного судна, такие как устройство 106 отображения.
Как показано на фиг. 1, усовершенствованная курсовертикаль (AHRS) 102 с коррекцией по системе GPS связана с приемником 107 GPS и содержит первичный узел 118 инерциальных датчиков и вторичный узел 120 инерциальных датчиков. В типовых вариантах реализации курсовертикаль (AHRS) с коррекцией по системе GPS содержит только один узел инерциальных датчиков в силу дороговизны и других ограничений. Курсовертикаль (AHRS) 102, как известно специалистам в области техники, поставляется в различных форм-факторах, в том числе со стандартными размерами формата «4 MCU», т.е. 7,64 дюйма в высоту, 12,76 дюйма в длину и 4,88 дюйма в ширину. Элементы в соответствии с вариантами осуществления изобретения могут быть заключены в такой курсовертикали (AHRS) 102 с форм-фактором «4 MCU», а также с другими форм-факторами.
Как и узлы 108 инерциальных датчиков в блоках ADIRU 104А, 104В, первичный и вторичный узлы 118, 120 инерциальных датчиков содержат акселерометры 122 и гироскопы 124. Кроме того и аналогично вышеописанному, в соответствии с некоторыми вариантами осуществления изобретения в каждый узел 118, 120 инерциальных датчиков могут быть включены три акселерометра 122 и три гироскопа 124 соответственно. Однако в соответствии с некоторыми вариантами осуществления изобретения количество и тип гироскопов 112, 124 и акселерометров 110, 122 в каждом узле 108, 118, 120 инерциальных датчиков может быть разным. Например, в соответствии с некоторыми вариантами осуществления изобретения узел 108 инерциальных датчиков может содержать кольцевые лазерные гироскопы 112, а узлы 118, 120 инерциальных датчиков могут содержать гироскопы на микроэлектромеханических системах (МЭМС или MEMS, от англ. micro electromechanical systems) или оптоволоконные гироскопы 124. В соответствии с другими вариантами осуществления изобретения акселерометры 122 и гироскопы 124 в узле 118 инерциальных датчиков могут отличаться от акселерометров 122 и гироскопов 124, содержащихся в узле 120 инерциальных датчиков. Однако это лишь примеры, не подразумевающие каких-либо ограничений.
Усовершенствованная курсовертикаль (AHRS) 102 с коррекцией по системе GPS также содержит независимые обрабатывающие устройства 126, 128 для каждого узла 118, 120 инерциальных датчиков соответственно. Таким образом, первичное обрабатывающее устройство 126 выполнено с возможностью приема инерциальных данных от первичного узла 118 инерциальных датчиков и обеспечения величин пространственного положения и инерциальных величин на основе принятых инерциальных данных; и вторичное обрабатывающее устройство 128 выполнено с возможностью приема инерциальных данных от вторичного узла 120 инерциальных датчиков и обеспечения величин пространственного положения и/или инерциальных величин на основе принятых инерциальных данных. Кроме того что каждый узел 118, 120 инерциальных датчиков содержит независимое обрабатывающее устройство 126, 128, в соответствии с приведенными для примера вариантами осуществления изобретения отличается и программное обеспечение, выполняемое каждым из соответствующих обрабатывающих устройств 126, 128. Обрабатывающие устройства 126, 128 сделаны независимыми, а программное обеспечение, выполняемое каждым обрабатывающим устройством 126, 128, неодинаковым с целью предотвращения отказа по одной и той же причине. В результате любая стандартная неисправность в обрабатывающих устройствах 126, 128 и/или программном обеспечении, выполняемом обрабатывающими устройствами 126, 128, не нарушит работу сразу обоих узлов 118, 120 инерциальных датчиков. Это в отличие от типовых вариантов применения, в которых обычная курсовертикаль (AHRS) с коррекцией по системе GPS содержит только одно обрабатывающее устройство в силу дороговизны и других ограничений.
В соответствии с некоторыми вариантами осуществления изобретения вторичное обрабатывающее устройство 128 может вычислять подгруппу величин пространственного положения и инерциальных величин, которые вычисляет первичное обрабатывающее устройство 126. Например, в соответствии с некоторыми вариантами осуществления изобретения вторичное обрабатывающее устройство 128, выделенное для вторичного узла 120 инерциальных датчиков, может вычислять только величины пространственного положения, в то время как первичное обрабатывающее устройство 126 вычисляет величины пространственного положения и инерциальные величины.
Каждый узел 118, 120 инерциальных датчиков также содержит отдельное устройство 130, 132 ввода-вывода (I/O). Таким образом, первичное устройство 130 ввода-вывода (I/O) выполнено с возможностью приема инерциальных величин от первичного обрабатывающего устройства 126 и выдачи величин пространственного положения и инерциальных величин другим системам в воздушном судне, таким как устройство 106 отображения; и вторичное устройство 132 ввода-вывода (I/O) выполнено с возможностью приема инерциальных величин от вторичного обрабатывающего устройства 128 и выдачи величин пространственного положения и/или инерциальных величин другим системам в воздушном судне, таким как устройство 106 отображения.
Воздушные суда, в навигационной системе 100 которых установлена курсовертикаль (AHRS) 102 с коррекцией по системе GPS, могут взлетать с одним отказавшим блоком ADIRU 104А, 104 В. Конкретно, в соответствии с раскрытыми в настоящем документе аспектами, взлет воздушного судна с одним отказавшим блоком ADIRU 104А, 104В возможен, поскольку имеется третья навигационная величина, создаваемая или первичным узлом 118 инерциальных датчиков, или вторичным узлом 120 инерциальных датчиков, которая действует в качестве дополнительного определяющего критерия выбора. Например, допустим, что произошел отказ блока ADIRU 104А, а оставшийся блок ADIRU 104В и первичный узел 118 инерциальных датчиков создают неодинаковые результаты. Для определения, которая из двух величин пространственного положения и/или двух величин пространственного положения и инерциальных величин, создаваемых исправным блоком ADIRU 104В и первичным узлом 118 инерциальных датчиков, является верной, устройством 106 отображения может быть использована информация от вторичного узла 120 инерциальных датчиков, поскольку он выдает дополнительную навигационную величину. Другими словами, есть три величины пространственного положения и/или три инерциальные величины, из которых две создает курсовертикаль (AHRS) 102 с коррекцией по системе GPS и одну создает исправный блок ADIRU 104В. Если величина пространственного положения, создаваемая первичным узлом 118 инерциальных датчиков и процессором 126, отличается от величины пространственного положения, создаваемой исправным блоком ADIRU 104В, на определенное пороговое значение (например, более чем на 2%), устройством 106 отображения может быть использована величина пространственного положения, создаваемая вторичным узлом 120 инерциальных датчиков и процессором 128, в качестве определяющей, которое из устройств создает правильную величину пространственного положения. Это может быть осуществлено путем определения, меньше ли порогового значения (например, 2%) разница между группой величин пространственного положения и/или инерциальных величин, создаваемых обрабатывающим устройством 114, входящим в состав исправного блока ADIRU 104В, и величинами пространственного положения и/или инерциальными величинами, создаваемыми вторичным обрабатывающим устройством 128, или меньше ли порогового значения (например, 2%) разница между группой величин пространственного положения и/или инерциальных величин, создаваемых первичным обрабатывающим устройством 126, и группой величин пространственного положения и/или инерциальных величин, создаваемых вторичным обрабатывающим устройством 128. В результате воздушное судно с одним отказавшим блоком ADIRU 104А, 104В сохраняет возможность взлета.
На фиг. 2 проиллюстрирован пример способа 200 определения, которая из двух неодинаковых величин пространственного положения является верной. Способ 200 предусматривает вычисление первой группы величин пространственного положения с помощью навигационного устройства (стадия 202). Первая группа величин пространственного положения может создаваться блоком ADIRU или другим навигационным устройством, аналогичным блокам ADIRU 104А, 104В, описанным выше, и может содержать угол тангажа, угол крена и/или курс.
Способ 200 дополнительно предусматривает вычисление первичной группы величин пространственного положения с помощью усовершенствованной курсовертикали, причем вычисление первичной группы величин пространственного положения выполняют с помощью первичной группы алгоритмов (стадия 204). Первичную группу величин пространственного положения и инерциальных величин могут вычислять с помощью первичного узла инерциальных датчиков, входящего в состав усовершенствованного навигационного устройства. В соответствии с некоторыми вариантами осуществления изобретения некоторые или все характеристики первичного узла инерциальных датчиков могут быть такими же, как и у первичного узла 118 инерциальных датчиков, описанного выше. Кроме того, в соответствии с приведенными для примера вариантами осуществления изобретения для вычисления первой группы величин пространственного положения и инерциальных величин могут использовать первый процессор. В соответствии с некоторыми вариантами осуществления изобретения некоторые или все характеристики первого процессора могут быть такими же, как и у обрабатывающего устройства 126, описанного выше.
Способ 200 дополнительно предусматривает вычисление вторичной группы величин пространственного положения с помощью усовершенствованной курсовертикали, причем вычисление вторичной группы величин пространственного положения выполняют с помощью второй группы алгоритмов, при этом первичная группа алгоритмов отличается от второй группы алгоритмов (стадия 206). Вторичную группу величин пространственного положения вычисляют по вторичным инерциальным данным. В соответствии с некоторыми вариантами осуществления изобретения дополнительно к вторичной группе величин пространственного положения могут вычислять вторичную группу инерциальных величин. Аналогично вышеприведенному описанию вторичные данные о пространственном положении и инерциальные данные может создавать вторичный узел инерциальных датчиков, входящий в состав усовершенствованного навигационного устройства. В соответствии с некоторыми вариантами осуществления изобретения некоторые или все характеристики вторичного узла инерциальных датчиков могут быть такими же, как и у вторичного узла 120 инерциальных датчиков, описанного выше. Кроме того, в соответствии с приведенными для примера вариантами осуществления изобретения для вычисления второй группы величин пространственного положения и инерциальных величин могут использовать второй процессор. В соответствии с некоторыми вариантами осуществления изобретения некоторые или все характеристики второго процессора могут быть такими же, как и у обрабатывающего устройства 128, описанного выше.
Способ 200 дополнительно предусматривает определение, которая из первой группы величин пространственного положения и первичной группы величин пространственного положения является правильной путем определения, меньше ли порогового значения (например, 2%) разница между первой группой величин пространственного положения и вторичной группой величин пространственного положения или меньше ли порогового значения (например, 2%) разница между первичной группой величин пространственного положения и вторичной группой величин пространственного положения, когда разница между первой группой величин пространственного положения и первичными величинами пространственного положения больше порогового значения (например, 2%) (стадия 208). В соответствии с некоторыми вариантами осуществления изобретения это может осуществлять устройство отображения, аналогичное устройству 106 отображения, описанному выше. В соответствии с некоторыми вариантами осуществления изобретения, когда разница между первой группой величин пространственного положения и первичной группой величин пространственного положения превышает пороговое значение, на устройстве отображения могут показывать предупреждение. Например, если вычисленный угол тангажа в первой группе величин пространственного положения отличается от вычисленного угла тангажа в первичной группе величин пространственного положения более чем на 2%, то может быть выдано предупреждение о том, что требуется выполнение этой стадии. Однако это лишь пример, не подразумевающий каких-либо ограничений.
В соответствии с некоторыми вариантами осуществления изобретения способ 200 может дополнительно предусматривать выдачу первичной группы величин пространственного положения и инерциальных величин через первую шину в устройство отображения. В соответствии с некоторыми вариантами осуществления изобретения некоторые или все характеристики шины могут быть такими же, как и у устройства 130 ввода-вывода (I/O), описанного выше. Кроме того, в соответствии с некоторыми вариантами осуществления изобретения способ 200 может дополнительно предусматривать выдачу вторичной группы величин пространственного положения через вторую шину. В соответствии с некоторыми вариантами осуществления изобретения некоторые или все характеристики шины могут быть такими же, как и у устройства 132 ввода-вывода (I/O), описанного выше.
Запоминающее устройство, используемое в предлагаемых системах и способах, может представлять собой любой материальный носитель считываемой процессором информации для длительного хранения считываемых процессором команд или структур данных. Подходящие носители считываемой процессором информации могут представлять собой материальные носители, такие как магнитные или оптические носители. Например, материальные носители могут представлять собой физические устройства, такие как, кроме прочего, обычный жесткий диск, компакт-диск (например, доступный только для чтения или перезаписываемый), энергозависимые или энергонезависимые носители, такие как оперативное запоминающее устройство (ОЗУ или RAM, от англ. random access memory), в том числе, кроме прочего, синхронное динамическое ОЗУ (SDRAM, от англ. synchronous dynamic random access memory), ОЗУ с удвоенной скоростью передачи данных (DDR RAM, от англ. double data rate RAM), динамическое ОЗУ RAMBUS (RDRAM), статическое ОЗУ (SRAM, от англ. static RAM) и др., постоянное запоминающее устройство (ПЗУ или ROM, от англ. read only memory), электрически стираемое перепрограммируемое ПЗУ (EEPROM, от англ. electrically erasable programmable ROM), флэш-память и т.д.
Обрабатывающее устройство, используемое в предлагаемых системах и способах, может быть реализовано с помощью программного обеспечения, микропрограмм, аппаратного обеспечения или их любого подходящего сочетания, известного специалисту в области техники. Указанное может быть дополнено специально разработанными интегральными схемами специального назначения (ASIC, от англ. application-specific integrated circuit), программируемыми пользователем вентильными матрицами (ППВМ или FPGA, от англ. field programmable gate array) или встроено в них. Обрабатывающее устройство также может характеризоваться наличием функций с программами программного обеспечения, микропрограммами или другими считываемыми компьютером командами для выполнения различных технологических задач, вычислений и функций управления, используемых в настоящих способе и системе.
Одно или несколько действий, описанных в предложенных способах, могут быть реализованы с помощью выполняемых компьютером команд, таких как программные модули или компоненты, которые выполняются по меньшей мере одним процессором. Обычно программные модули содержат подпрограммы, программы, объекты, компоненты данных, структуры данных, алгоритмы и тому подобное, которые выполняют конкретные задания или реализованные конкретные абстрактные типы данных.
Команды для выполнения различных технологических задач, вычислений и создания других данных, используемых в ходе выполнения способов, описанных в настоящем документе, могут быть реализованы в программном обеспечении, микропрограммах или иных считываемых компьютером или процессором командах. Эти команды обычно хранят на любом подходящем компьютерном программном продукте, который содержит носитель считываемой компьютером информации, используемый для хранения считываемых компьютером команд или структур данных. Такой носитель считываемой компьютером информации может представлять собой любые пригодные носители, к которым может быть осуществлен доступ универсальным или специализированным компьютером либо процессором или любым устройством логического программирования.
Примеры вариантов осуществления изобретения
Пример 1 содержит систему бортового авиационного оборудования, содержащую: инерциальное навигационное устройство, выполненное с возможностью создания первой группы величин пространственного положения; курсовертикаль, выполненную с возможностью создания первичной группы величин пространственного положения и вторичной группы величин пространственного положения; и устройство отображения, выполненное с возможностью приема первой группы величин пространственного положения, первичной группы величин пространственного положения и вторичной группы величин пространственного положения, причем если разница между первой группой величин пространственного положения и первичной группой величин пространственного положения превышает пороговое значение, то устройство отображения определяет, которая из первой группы величин пространственного положения и первичной группы величин пространственного положения верна путем выявления, меньше ли порогового значения разница между первой группой величин пространственного положения и вторичной группой величин пространственного положения или меньше ли порогового значения разница между первичной группой величин пространственного положения и вторичной группой величин пространственного положения.
Пример 2 содержит систему бортового авиационного оборудования по примеру 1, в которой курсовертикаль содержит: первичный узел инерциальных датчиков, выполненный с возможностью создания первичных инерциальных данных; первичное обрабатывающее устройство, соединенное с первичным узлом инерциальных датчиков с возможностью передачи данных, причем первичное обрабатывающее устройство выполнено с возможностью приема первичных инерциальных данных и вычисления первичной группы величин о пространственном положении по первичным инерциальным данным; вторичный узел инерциальных датчиков, выполненный с возможностью создания вторичных инерциальных данных; и вторичное обрабатывающее устройство, соединенное со вторичным узлом инерциальных датчиков с возможностью передачи данных, причем вторичное обрабатывающее устройство выполнено с возможностью приема вторичных инерциальных данных и вычисления вторичной группы величин о пространственном положении.
Пример 3 содержит систему бортового авиационного оборудования по примеру 2, в которой усовершенствованная курсовертикаль дополнительно содержит: первичный блок ввода-вывода, соединенный с первичным обрабатывающим устройством с возможностью передачи данных, причем первичный блок ввода-вывода выполнен с возможностью получения первичной группы величин пространственного положения и инерциальных величин от первичного обрабатывающего устройства и передачи первичной группы величин пространственного положения и инерциальных величин в устройство отображения; и вторичный блок ввода-вывода, соединенный со вторичным обрабатывающим устройством с возможностью передачи данных, причем вторичный блок ввода-вывода выполнен с возможностью получения вторичной группы величин пространственного положения от вторичного обрабатывающего устройства и передачи вторичной группы величин пространственного положения в устройство отображения.
Пример 4 содержит систему бортового авиационного оборудования по любому из примеров 2, 3, в которой первичное обрабатывающее устройство представляет собой микропроцессор, а вторичное обрабатывающее устройство представляет собой программируемую пользователем вентильную матрицу.
Пример 5 содержит систему бортового авиационного оборудования по любому из примеров 2-4, в которой первичное обрабатывающее устройство выполняет первичную группу алгоритмов для вычисления первичной группы величин пространственного положения, а вторичное обрабатывающее устройство выполняет вторую группу алгоритмов для вычисления вторичной группы величин пространственного положения, причем первичная группа алгоритмов отличается от второй группы алгоритмов.
Пример 6 содержит систему бортового авиационного оборудования по любому из примеров 2-5, в которой первичный узел инерциальных датчиков содержит три первичных гироскопа и три первичных акселерометра, а вторичный узел инерциальных датчиков содержит три вторичных гироскопа и три вторичных акселерометра, причем три первичных гироскопа отличаются от трех вторичных гироскопов, а три первичных акселерометра отличаются от трех вторичных акселерометров.
Пример 7 содержит систему бортового авиационного оборудования по любому из примеров 1-6, в которой первая группа величин пространственного положения, первичная группа величин пространственного положения и вторичная группа величин пространственного положения представляют собой по меньшей мере одно из следующего: угол тангажа, угол крена или курс.
Пример 8 содержит систему бортового авиационного оборудования по любому из примеров 1-7, в которой курсовертикаль выполнена с возможностью приема сигналов от глобального навигационного спутникового приемника.
Пример 9 содержит систему бортового авиационного оборудования по любому из примеров 1-8, в которой устройство отображения показывает предупреждение, когда разница между первой группой величин пространственного положения и первичной группой величин пространственного положения превышает пороговое значение.
Пример 10 содержит курсовертикаль, содержащую: первичный узел инерциальных датчиков, выполненный с возможностью создания первичных инерциальных данных; первичное обрабатывающее устройство, соединенное с первичным узлом инерциальных датчиков с возможностью передачи данных, причем первичное обрабатывающее устройство выполнено с возможностью приема первичных инерциальных данных и вычисления первичной группы величин пространственного положения по первичным инерциальным данным; вторичный узел инерциальных датчиков, выполненный с возможностью создания вторичных инерциальных данных; вторичное обрабатывающее устройство, соединенное со вторичным узлом инерциальных датчиков с возможностью передачи данных, причем вторичное обрабатывающее устройство выполнено с возможностью приема вторичных инерциальных данных и вычисления вторичной группы величин пространственного положения; и причем если разница между первой группой величин пространственного положения и первичной группой величин пространственного положения превышает пороговое значение, то устройство отображения определяет, которая из первой группы величин пространственного положения и первичной группы величин пространственного положения верна путем выявления, меньше ли порогового значения разница между первой группой величин пространственного положения и вторичной группой величин пространственного положения или меньше ли порогового значения разница между первичной группой величин пространственного положения и вторичной группой величин пространственного положения.
Пример 11 содержит усовершенствованную курсовертикаль по примеру 10, дополнительно содержащую: первичный блок ввода-вывода, соединенный с первичным обрабатывающим устройством с возможностью передачи данных, причем первичный блок ввода-вывода выполнен с возможностью получения первичной группы величин пространственного положения и инерциальных величин от первичного обрабатывающего устройства и передачи первичной группы величин пространственного положения и инерциальных величин в устройство отображения; и вторичный блок ввода-вывода, соединенный со вторичным обрабатывающим устройством с возможностью передачи данных, причем вторичный блок ввода-вывода выполнен с возможностью получения вторичной группы величин пространственного положения от вторичного обрабатывающего устройства и передачи вторичной группы величин пространственного положения в устройство отображения.
Пример 12 содержит курсовертикаль по любому из примеров 10, 11, в которой первичное обрабатывающее устройство представляет собой микропроцессор, а вторичное обрабатывающее устройство представляет собой программируемую пользователем вентильную матрицу.
Пример 13 содержит курсовертикаль по любому из примеров 10-12, в которой первичное обрабатывающее устройство выполняет первичную группу алгоритмов для вычисления первичной группы величин пространственного положения, а вторичное обрабатывающее устройство выполняет вторую группу алгоритмов для вычисления вторичной группы величин пространственного положения, причем первичная группа алгоритмов отличается от второй группы алгоритмов.
Пример 14 содержит курсовертикаль по любому из примеров 10-13, в которой первая группа величин пространственного положения, первичная группа величин пространственного положения и вторичная группа величин пространственного положения представляют собой по меньшей мере одно из следующего: угол тангажа, угол крена или курс.
Пример 15 содержит курсовертикаль по любому из примеров 10-14, в которой курсовертикаль выполнена с возможностью приема сигналов от глобального навигационного спутникового приемника.
Пример 16 содержит курсовертикаль по любому из примеров 10-15, в которой первичный узел инерциальных датчиков содержит три первичных гироскопа и три первичных акселерометра, а вторичный узел инерциальных датчиков содержит три вторичных гироскопа и три вторичных акселерометра, причем три первичных гироскопа отличаются от трех вторичных гироскопов, а три первичных акселерометра отличаются от трех вторичных акселерометров.
Пример 17 содержит курсовертикаль по любому из примеров 10-16, в которой устройство отображения показывает предупреждение, когда разница между первой группой величин пространственного положения и первичной группой величин пространственного положения превышает пороговое значение.
Пример 18 содержит способ определения, которая из двух неодинаковых величин пространственного положения верна, причем способ предусматривает: вычисление первой группы величин пространственного положения с помощью инерциального навигационного устройства; вычисление первичной группы величин пространственного положения с помощью курсовертикали, причем вычисление первичной группы величин пространственного положения выполняют с помощью первичной группы алгоритмов; вычисление вторичной группы величин пространственного положения с помощью курсовертикали, причем вычисление вторичной группы величин пространственного положения выполняют с помощью второй группы алгоритмов, при этом первичная группа алгоритмов отличается от второй группы алгоритмов; и определение, которая из первой группы величин пространственного положения и первичной группы величин пространственного положения является правильной путем определения, меньше ли порогового значения разница между первой группой величин пространственного положения и вторичной группой величин пространственного положения или меньше ли порогового значения разница между первичной группой величин пространственного положения и вторичной группой величин пространственного положения, когда разница между первой группой величин пространственного положения и первичными величинами пространственного положения больше порогового значения.
Пример 19 содержит способ по примеру 18, который дополнительно предусматривает создание сигнала предупреждения, когда разница между первой группой величин пространственного положения и первичной группой величин пространственного положения превышает пороговое значение.
Пример 20 содержит способ по любому из примеров 18, 19, в котором первая группа величин пространственного положения, первичная группа величин пространственного положения и вторичная группа величин пространственного положения представляют собой по меньшей мере одно из следующего: угол тангажа, угол крена или курс.
Хотя в настоящем документе описаны и проиллюстрированы конкретные варианты осуществления изобретения, специалисту в области техники будет понятно, что показанные конкретные варианты осуществления изобретения могут быть заменены на любую конфигурацию, рассчитанную на достижение той же цели. Таким образом, ясно подразумевается, что настоящее изобретение ограничивается только пунктами формулы изобретения и их эквивалентами.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА И СПОСОБ ЛОКАЛИЗАЦИИ ОТКАЗОВ ПРИ ОПРЕДЕЛЕНИИ УГЛОВОГО ПРОСТРАНСТВЕННОГО ПОЛОЖЕНИЯ ВОЗДУШНОГО СУДНА | 2015 |
|
RU2692743C2 |
| СИСТЕМА ОПРЕДЕЛЕНИЯ КУРСА И УГЛОВОГО ПРОСТРАНСТВЕННОГО ПОЛОЖЕНИЯ, ВЫПОЛНЕННАЯ С ВОЗМОЖНОСТЬЮ ФУНКЦИОНИРОВАНИЯ В ПОЛЯРНОЙ ОБЛАСТИ | 2018 |
|
RU2762143C2 |
| РЕЗЕРВНАЯ СИСТЕМА ДЛЯ ИНДИКАЦИИ КУРСА И ПРОСТРАНСТВЕННОГО ПОЛОЖЕНИЯ НА САМОЛЕТЕ | 2000 |
|
RU2236697C2 |
| СПОСОБ ПОВЫШЕНИЯ ТОЧНОСТНЫХ ХАРАКТЕРИСТИК АВТОНОМНОЙ, БЕСПЛАТФОРМЕННОЙ ГИРОВЕРТИКАЛИ С ИНТЕГРАЛЬНОЙ КОРРЕКЦИЕЙ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2021 |
|
RU2801620C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ИНСТРУМЕНТАЛЬНЫХ ПОГРЕШНОСТЕЙ ИЗМЕРИТЕЛЕЙ ИНЕРЦИАЛЬНОЙ НАВИГАЦИОННОЙ СИСТЕМЫ НА ЭТАПЕ НАЧАЛЬНОЙ ВЫСТАВКИ | 2005 |
|
RU2300081C1 |
| СПОСОБ КАЛИБРОВКИ ГИРОСКОПИЧЕСКИХ ИЗМЕРИТЕЛЕЙ УГЛОВОЙ СКОРОСТИ | 1999 |
|
RU2156959C1 |
| СПОСОБ АВТОНОМНОЙ ИНЕРЦИАЛЬНОЙ ОРИЕНТАЦИИ ПОДВИЖНЫХ ОБЪЕКТОВ | 2022 |
|
RU2800846C1 |
| Малогабаритная адаптивная курсовертикаль | 2016 |
|
RU2714144C2 |
| ПОРТАТИВНЫЙ КОМПЛЕКС АВИАНАБЛЮДЕНИЙ И АВТОНОМНОПИЛОТИРУЕМЫЙ ЛЕТАТЕЛЬНЫЙ МИКРОАППАРАТ ДЛЯ НЕГО | 2003 |
|
RU2232104C1 |
| СИСТЕМА И СПОСОБ УПРАВЛЕНИЯ ИНЕРЦИОННОЙ ПЛАТФОРМОЙ ПОДВИЖНОГО ОБЪЕКТА | 2007 |
|
RU2442962C2 |
Изобретение относится к области навигационного приборостроения и может найти применение в системах и способах формирования двух независимых неодинаковых величин пространственного положения, двух независимых неодинаковых инерциальных величин или и того, и другого с помощью одного усовершенствованного навигационного устройства. Технический результат – расширение функциональных возможностей. Для этого система бортового авиационного оборудования содержит: инерциальное навигационное устройство, выполненное с возможностью создания первой группы величин пространственного положения; курсовертикаль, выполненную с возможностью создания первичной группы величин пространственного положения и вторичной группы величин пространственного положения; и устройство отображения, выполненное с возможностью приема первой группы величин пространственного положения, первичной группы величин пространственного положения и вторичной группы величин пространственного положения, причем если первая группа величин пространственного положения и первичная группа величин пространственного положения дают разные результаты, то устройство отображения определяет, которая из первой группы величин пространственного положения и первичной группы величин пространственного положения верна путем определения разниц между величинами пространственного положения и выявления, которая из разниц ниже порогового значения. 3 н. и 17 з.п. ф-лы, 2 ил.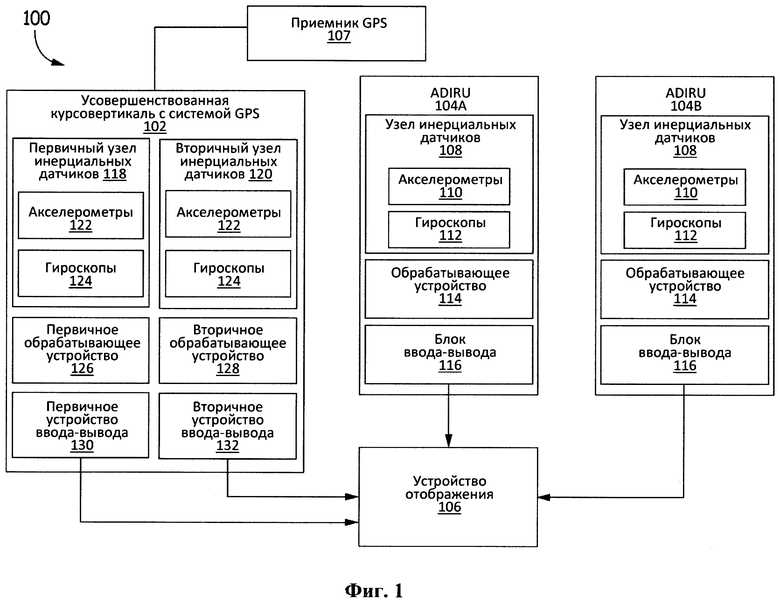
1. Система бортового авиационного оборудования, содержащая:
инерциальное навигационное устройство, выполненное с возможностью создания первой группы величин пространственного положения;
курсовертикаль, выполненную с возможностью создания первичной группы величин пространственного положения и вторичной группы величин пространственного положения; и
устройство отображения, выполненное с возможностью приема первой группы величин пространственного положения, первичной группы величин пространственного положения и вторичной группы величин пространственного положения,
причем если разница между первой группой величин пространственного положения и первичной группой величин пространственного положения превышает пороговое значение, то устройство отображения определяет, которая из первой группы величин пространственного положения и первичной группы величин пространственного положения верна путем выявления, меньше ли порогового значения разница между первой группой величин пространственного положения и вторичной группой величин пространственного положения или меньше ли порогового значения разница между первичной группой величин пространственного положения и вторичной группой величин пространственного положения.
2. Система бортового авиационного оборудования по п. 1, в которой курсовертикаль содержит:
первичный узел инерциальных датчиков, выполненный с возможностью создания первичных инерциальных данных;
первичное обрабатывающее устройство, соединенное с первичным узлом инерциальных датчиков с возможностью передачи данных, причем первичное обрабатывающее устройство выполнено с возможностью приема первичных инерциальных данных и вычисления первичной группы величин о пространственном положении по первичным инерциальным данным;
вторичный узел инерциальных датчиков, выполненный с возможностью создания вторичных инерциальных данных; и
вторичное обрабатывающее устройство, соединенное со вторичным узлом инерциальных датчиков с возможностью передачи данных, причем вторичное обрабатывающее устройство выполнено с возможностью приема вторичных инерциальных данных и вычисления вторичной группы величин о пространственном положении.
3. Система бортового авиационного оборудования по п. 2, в которой курсовертикаль дополнительно содержит:
первичный блок ввода-вывода, соединенный с первичным обрабатывающим устройством с возможностью передачи данных, причем первичный блок ввода-вывода выполнен с возможностью получения первичной группы величин пространственного положения и инерциальных величин от первичного обрабатывающего устройства и передачи первичной группы величин пространственного положения и инерциальных величин в устройство отображения; и
вторичный блок ввода-вывода, соединенный со вторичным обрабатывающим устройством с возможностью передачи данных, причем вторичный блок ввода-вывода выполнен с возможностью получения вторичной группы величин пространственного положения от вторичного обрабатывающего устройства и передачи вторичной группы величин пространственного положения в устройство отображения.
4. Система бортового авиационного оборудования по п. 2, в которой первичное обрабатывающее устройство представляет собой микропроцессор, а вторичное обрабатывающее устройство представляет собой программируемую пользователем вентильную матрицу.
5. Система бортового авиационного оборудования по п. 2, в которой первичное обрабатывающее устройство выполняет первичную группу алгоритмов для вычисления первичной группы величин пространственного положения, а вторичное обрабатывающее устройство выполняет вторую группу алгоритмов для вычисления вторичной группы величин пространственного положения, причем первичная группа алгоритмов отличается от второй группы алгоритмов.
6. Система бортового авиационного оборудования по п. 2, в которой первичный узел инерциальных датчиков содержит три первичных гироскопа и три первичных акселерометра, а вторичный узел инерциальных датчиков содержит три вторичных гироскопа и три вторичных акселерометра, причем три первичных гироскопа отличаются от трех вторичных гироскопов, а три первичных акселерометра отличаются от трех вторичных акселерометров.
7. Система бортового авиационного оборудования по п. 1, в которой первая группа величин пространственного положения, первичная группа величин пространственного положения и вторичная группа величин пространственного положения представляют собой по меньшей мере одно из следующего: угол тангажа, угол крена или курс.
8. Система бортового авиационного оборудования по п. 1, в которой курсовертикаль выполнена с возможностью приема сигналов от глобального навигационного спутникового приемника.
9. Система бортового авиационного оборудования по п. 1, в которой устройство отображения показывает предупреждение, когда разница между первой группой величин пространственного положения и первичной группой величин пространственного положения превышает пороговое значение.
10. Курсовертикаль, содержащая:
первичный узел инерциальных датчиков, выполненный с возможностью создания первичных инерциальных данных;
первичное обрабатывающее устройство, соединенное с первичным узлом инерциальных датчиков с возможностью передачи данных, причем первичное обрабатывающее устройство выполнено с возможностью приема первичных инерциальных данных и вычисления первичной группы величин пространственного положения по первичным инерциальным данным;
вторичный узел инерциальных датчиков, выполненный с возможностью создания вторичных инерциальных данных;
вторичное обрабатывающее устройство, соединенное со вторичным узлом инерциальных датчиков с возможностью передачи данных, причем вторичное обрабатывающее устройство выполнено с возможностью приема вторичных инерциальных данных и вычисления вторичной группы величин пространственного положения; и
причем если разница между первой группой величин пространственного положения и первичной группой величин пространственного положения превышает пороговое значение, то устройство отображения определяет, какая из первой группы величин пространственного положения и первичной группы величин пространственного положения верна путем выявления, меньше ли порогового значения разница между первой группой величин пространственного положения и вторичной группой величин пространственного положения или меньше ли порогового значения разница между первичной группой величин пространственного положения и вторичной группой величин пространственного положения.
11. Курсовертикаль по п. 10, дополнительно содержащая:
первичный блок ввода-вывода, соединенный с первичным обрабатывающим устройством с возможностью передачи данных, причем первичный блок ввода-вывода выполнен с возможностью получения первичной группы величин пространственного положения и инерциальных величин от первичного обрабатывающего устройства и передачи первичной группы величин пространственного положения и инерциальных величин в устройство отображения; и
вторичный блок ввода-вывода, соединенный со вторичным обрабатывающим устройством с возможностью передачи данных, причем вторичный блок ввода-вывода выполнен с возможностью получения вторичной группы величин пространственного положения от вторичного обрабатывающего устройства и передачи вторичной группы величин пространственного положения в устройство отображения.
12. Курсовертикаль по п. 10, в которой первичное обрабатывающее устройство представляет собой микропроцессор, а вторичное обрабатывающее устройство представляет собой программируемую пользователем вентильную матрицу.
13. Курсовертикаль по п. 10, в которой первичное обрабатывающее устройство выполняет первичную группу алгоритмов для вычисления первичной группы величин пространственного положения, а вторичное обрабатывающее устройство выполняет вторую группу алгоритмов для вычисления вторичной группы величин пространственного положения, причем первичная группа алгоритмов отличается от второй группы алгоритмов.
14. Курсовертикаль по п. 10, в которой первая группа величин пространственного положения, первичная группа величин пространственного положения и вторичная группа величин пространственного положения представляют собой по меньшей мере одно из следующего: угол тангажа, угол крена или курс.
15. Курсовертикаль по п. 10, в которой курсовертикаль выполнена с возможностью приема сигналов от глобального навигационного спутникового приемника.
16. Курсовертикаль по п. 10, в которой первичный узел инерциальных датчиков содержит три первичных гироскопа и три первичных акселерометра, а вторичный узел инерциальных датчиков содержит три вторичных гироскопа и три вторичных акселерометра, причем три первичных гироскопа отличаются от трех вторичных гироскопов, а три первичных акселерометра отличаются от трех вторичных акселерометров.
17. Курсовертикаль по п. 10, в которой устройство отображения показывает предупреждение, когда разница между первой группой величин пространственного положения и первичной группой величин пространственного положения превышает пороговое значение.
18. Способ определения, какая из двух неодинаковых величин пространственного положения верна, включающий:
вычисление первой группы величин пространственного положения с помощью инерциального навигационного устройства;
вычисление первичной группы величин пространственного положения с помощью курсовертикали, причем вычисление первичной группы величин пространственного положения выполняют с помощью первичной группы алгоритмов;
вычисление вторичной группы величин пространственного положения с помощью курсовертикали, причем вычисление вторичной группы величин пространственного положения выполняют с помощью второй группы алгоритмов, при этом первичная группа алгоритмов отличается от второй группы алгоритмов; и
определение, которая из первой группы величин пространственного положения и первичной группы величин пространственного положения является правильной путем определения, меньше ли порогового значения разница между первой группой величин пространственного положения и вторичной группой величин пространственного положения или меньше ли порогового значения разница между первичной группой величин пространственного положения и вторичной группой величин пространственного положения, когда разница между первой группой величин пространственного положения и первичными величинами пространственного положения больше порогового значения.
19. Способ по п. 18, дополнительно включающий создание сигнала предупреждения, когда разница между первой группой величин пространственного положения и первичной группой величин пространственного положения превышает пороговое значение.
20. Способ по п. 18, в котором первая группа величин пространственного положения, первичная группа величин пространственного положения и вторичная группа величин пространственного положения представляют собой по меньшей мере одно из следующего: угол тангажа, угол крена или курс.
| US 20100268414 A1, 21.10.2010 | |||
| US 6408245 B1, 18.06.2002 | |||
| КОМПЛЕКСНАЯ НАВИГАЦИОННАЯ СИСТЕМА | 2004 |
|
RU2265190C1 |
| БАБИЧ О.А | |||
| Обработка информации в навигационных комплексах | |||
| - М.: Машиностроение, 1991, с.6-16, 391-507 | |||
| DE 19510910 A1, 28.09.1995 | |||
| Интеллектуальная система сбора и обработки данных в интерактивных системах программного управления, рис | |||
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |
| - М.: СОЛОН-ПРЕСС, 2014. | |||

