Изобретение относится к области определения координат подвижных объектов (ПО) и может использоваться для определения координат удаленных подвижных объектов в условиях отсутствия ГНСС, определения корректур координат и курса штатных навигационных систем, определения координат целей наблюдаемых с воздушных средств разведки, определения координат точек падения снарядов при пристрелке удаленных целей, определения координат положения снарядов на всей траектории полета в интересах совершенствования теории внешней баллистики, повышения точности координатно-временного обеспечения потребителей информационной системы координатно-временного обеспечения (ИСКВО) "Скорпион" и решения других задач.
Известен способ определения координат с помощью ГНСС. В этом способе определение координат осуществляется по координатам спутников и расстояниям от приемника до четырех и более спутников находящихся на орбите земли. Координаты положения спутников регулярно уточняются и передаются в приемник. Расстояние до спутников определяется как произведение скорости распространения радиоволн на время движения радиосигнала от спутника до приемника. Получив сигналы от нескольких спутников, приемник ищет точку пересечения соответствующих окружностей и, если такую точку не находит, то компьютер в приемнике начинает корректировать время методом последовательных итераций до тех пор, пока не сведет все измерения к одной точке. Кроме навигационных сигналов спутники передают на приемник служебную информацию, в которой содержится альманах, содержащий данные об орбитах и координатах спутника и эфимерис (данные, содержащие важную информацию о рабочем состояние спутника, текущей дате и времени).
Данный способ определения координат обладает высокой мобильностью и точностью, но имеет существенные недостатки. Основным недостатком способа определения координат с помощью ГНСС является то, что сигнал до приемника при определенных условиях может и не доходить, либо приходить, но со значительными задержками или искажениями. На распространение сигнала влияет тропосферная рефракция, под которой понимают задержку радиосигналов в нейтральных слоях атмосферы стратосфере и тропосфере. В нижних слоях атмосферы, особенно в тропосфере, на скорость распространения радиоволн сильное влияние оказывают метеоусловия. Множество геофизических и метеорологических факторов требует постоянного уточнения элементов орбит и коэффициентов поправок спутниковых часов в наземном пункте управления для передачи по каналам связи на спутники. Сигналы ГНСС подвержены искажениям из-за большой облачности, плотной растительности, помех, возникающих в результате магнитных бурь, или помех от наземных источников радиосигнала. В приполярных районах Земли точность ухудшает невысокое наклонение орбит, по которым движутся спутники.
К недостаткам ГНСС относится и высокая вероятность отказа системы из-за неисправностей спутников или пунктов СКДМ, возникающих в результате действий противоборствующей стороны.
Известен способ определения координат подвижных объектов и устройство для его осуществления (см., например, Гилль И.Л., Дальнов А.В., Кадничанский С.А., Полищук Ю.В., Штейншлейгер В.Б. Способ определения координат подвижных объектов и устройство для его осуществления, RU 2036431, 27.05.1995. г.). Описанный способ реализуется с помощью устройства, содержащего не менее одного сигнального радиопередатчика, устанавливаемого на соответствующем подвижном объекте, не менее трех опорных станций, каждая из которых выполнена с радиоприемной частью, узлом преобразования сигналов и узлом передачи сигналов, центральную станцию, выполненную с узлом приема сигналов, блоком обработки и вычислителем, и канал связи, соединяющий узел передачи каждой из опорных станций с узлом приема сигналов центральной станции. Технический результат в изобретении RU 2036431 достигается тем, что на подвижном объекте устанавливается передатчик, периодически излучающий измерительные сигналы, которые, принимаются и обрабатываются тремя и более опорными станциями. Опорные станции передают по каналу связи измерительные сигналы на центральную станцию. По результатам обработки опорного и измерительного сигналов определяется местоположения объекта. Способ, предложенный изобретением RU 2036431, не позволяет определять координаты объектов находящихся на значительном удалении и имеет низкую точность.
Целью изобретения является разработка высокоточного способа определения координат и углов положения осей объектов перемещающихся в пространстве в условиях сбоев ГНСС.
Технический результат изобретения достигается за счет отправки подвижными объектами сигналов содержащих время, определенное по бортовым часам, фиксации времени поступления сигналов по часам пунктов наблюдения и вычислений координат.
Для определения времени движения сигналов с высокой точностью на подвижных объектах и в пунктах наблюдения устанавливают дополнительные блоки, включающие атомные часы (таймеры), дальномеры, высотомеры, устройства считывания показаний бортовых приборов, блоки формирования и кодирования сигналов, УКВ приемопередатчики с антеннами, антенные коммутаторы, источники питания и другое оборудование. УКВ антенны подвижных объектов располагают в плоскостях, имеющих при выполнении задач по предназначению радиовидимость с пунктами наблюдения.
Время движения сигналов определяют как разницу времени регистрации сигналов подвижных объектов по часам пунктов наблюдения и времени отправки сигналов зафиксированного по часам подвижных объектов. Для упрощения реализации предложенного способа на малогабаритных ПО устанавливают вместо часов программируемые таймеры имеющие в качестве источника тактового сигнала атомные стандарты частоты (атомные таймеры). В этом случае время отправки сигналов определяют как сумму времени запуска атомных таймеров и времени отправки сигналов таймерами, определяемого по номеру сигнала в программах отправки сигналов введенных в память бортового таймера и атомных часов ПН перед стрельбой. Время запуска атомных таймеров фиксируют в момент схода PC с направляющей по атомным часам пунктов наблюдения находящихся на огневых позициях.
Расстояния между антеннами подвижных объектов и пунктов наблюдения определяют как произведение времени движения сигналов и скорости распространения радиоволн.
Координаты подвижных объектов определяют решением задачи комбинированной засечки по измеренным расстояниям и координатам антенн не менее двух пунктов наблюдения с использованием теоремы косинусов.
Пункты наблюдения размещают на земле или на привязных аэростатах.
Положение УКВ антенн ПН выбирают из условия радиовидимости траектории движения подвижных объектов и условия максимально возможного удаления от намеченной траектории движения ПО. В состав оборудования ПН дополнительно вводят блоки приема, декодирования, кодирования, отправки поступающих сообщений и вычислительное устройство для решения задач определения координат. Координаты антенн ПН размещенных на земле определяют заблаговременно, координаты антенн ПН на аэростатах определяют в момент поступления сигналов от подвижных объектов.
Для повышения точности измерений времени движения сигналов, во временные сигналы вводят поправки, учитывающие для каждой УКВ антенны задержки распространения сигналов из-за длины соединительного кабеля, времени коммутации и формирования сигналов. Перед выполнением задач проводят синхронизацию шкал времени часов подвижных объектов и шкал времени часов пунктов наблюдения. При выполнении задач, команды на отправку сигналов подвижными объектами, подаются автоматически в соответствии с заданными программами или операторами.
Для удобства декодирования сигналы имеют постоянную структуру, предусматривающую одинаковую последовательность размещения информации, выделение одинакового количества знаков для каждой группы независимо от выполняемой задачи.
Для автоматической идентификации назначения и принадлежности сигналов аппаратурой пунктов наблюдения в их состав вводят служебную информацию включающую:
- предназначение сигнала (установленное обозначение факта определения координат подвижного объекта, идентификатор адреса электронной почты центрального пункта наблюдения),
- идентификационный номер потребителя сигнала,
- высоту объекта, определенную с помощью высотомера,
- поправку шкалы времени часов подвижного объекта,
- порядковый номер сигнала,
- номер антенны,
- время отправки сигнала, зафиксированное по атомным часам подвижного объекта.
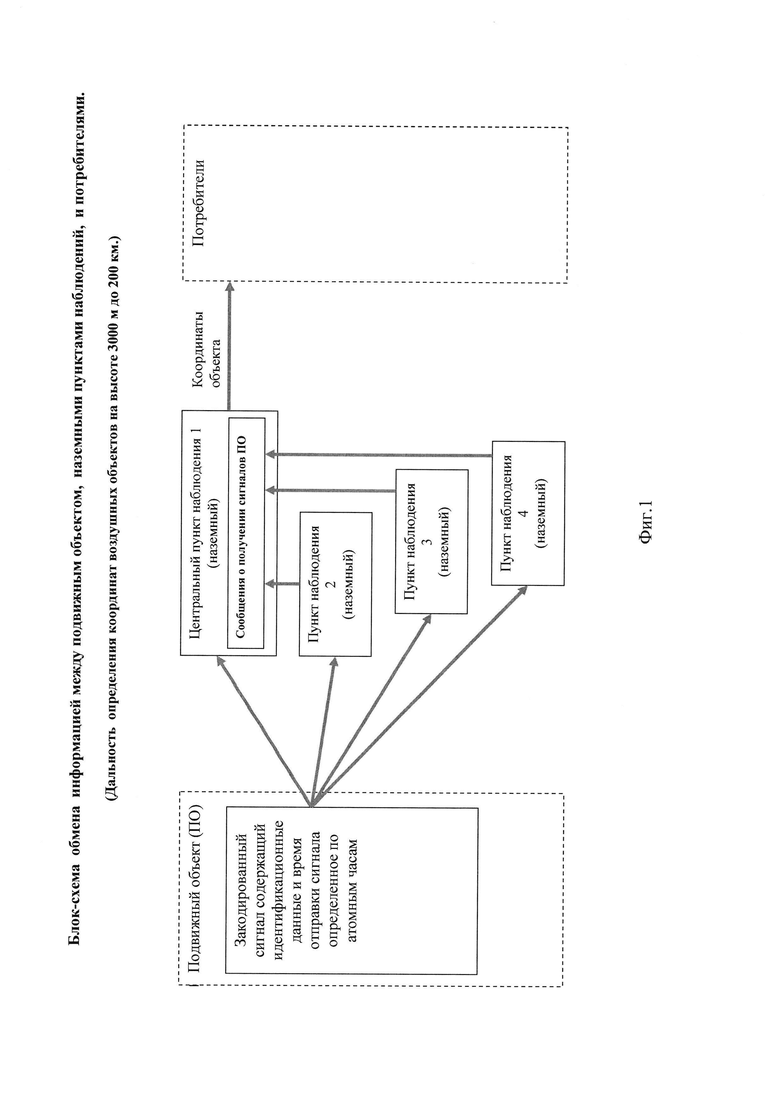
Служебную информацию сигналов подвижных объектов формируют и кодируют аппаратурой дополнительных блоков заблаговременно. При поступлении команд на отправку сигналов, блоки формирования фиксируют время по атомным часам подвижных объектов, дополняют цифровые значения точного времени служебной информацией и отправляют сигналы. Пункты наблюдения фиксируют время поступления сигналов от подвижных объектов по своим атомным часам, формируют и отправляют через закрытый сегмент передачи данных (ЗСПД) сообщения на центральные пункты наблюдения (ЦПН). Сообщения, отправленные на центральный пункт наблюдения, включают идентификационные номера ПН, информацию, содержащуюся в сигналах подвижных объектов, время поступления сигналов ПО зафиксированное по атомным часам пунктов наблюдения, поправки, учитывающие задержки распространения сигналов из-за длины соединительных кабелей между УКВ антеннами и атомными часами, а центральном пункте наблюдения поступившие сообщения преобразуют в формат электронных таблиц, сортируют по номерам подвижных объектов, сигналов и антенн. По отсортированным сигналам решают задачи определения координат подвижных объектов. Координаты антенн пунктов наблюдения определяют всеми доступными высокоточными способами, в том числе с использованием дифференциальных поправок ГНСС. Блок-схема обмена информацией между подвижным объектом, наземными пунктами наблюдений, и потребителями показана на рисунке Фиг. 1.
После развертывания и подготовки к работе пунктов наблюдения проводят проверку функционирования системы определения координат отправкой сигналов с объектов, радиовидимость с которыми существует, координаты которых определены с высокой точностью и имеющих необходимую дополнительную аппаратуру. По полученным сигналам пункты наблюдения определяют координаты. Сравнивают координаты определенные ПН с точными координатами объектов отправивших сигналы, выявляют и устраняют, в случае необходимости причины возможных ошибок.
Возможность достижения целей изобретения:
Для достижения целей изобретения необходимо обеспечить: условия радиовидимости подвижных объектов с пунктами наблюдения, возможность достижения необходимой точности определения координат и углов осей подвижных объектов, возможность получения пунктами наблюдения сигналов отправленных с удаленных подвижных объектов, возможность проведения синхронизации шкал времени атомных часов пунктов наблюдения и подвижных объектов.
Дальность радиовидимости между подвижными объектами и пунктами наблюдения (ДПВ) зависит от радиуса земли (RЗ), высот антенн подвижных объектов (НПО) и высот антенн пунктов наблюдения (НПН). Дальность радиовидимости определяют по приближенной формуле:

Зависимость дальности радиовидимости от высот подвижных объектов и пунктов наблюдения над поверхностью земли приведена в таблице Фиг. 2.
Результаты расчетов, приведенные в таблице показывают, что при высотах расположения антенн подвижных объектов 500 метров дальность радиовидимости с ПН превышает 85 километров, при высотах объектов 1000 метров и 3000 метров дальность их радиовидимости превышает 100 км и 200 км, соответственно. При высотах антенн пунктов наблюдения равных 3000 м дальность радиовидимости наземных объектов превышает 190 км.
Возможность достижения необходимой точности определения координат и углов осей объектов предлагаемым способом.
Точность определения координат подвижных объектов зависит от точности синхронизации шкал времени часов, точности фиксации времени отправки и поступления сигналов, точности определения координат антенн пунктов наблюдения и точности вычислений.
Для определения времени движения сигналов используют атомные часы. Характеристики доступных и перспективных компактных атомных часов показаны в таблице Фиг. 3. Для расчета достигаемых показателей точности определения времени и расстояний используют характеристики атомного стандарта FE-5650A. Ошибка стабильности (среднеквадратическое относительное двухвыборочное отклонение частоты) для FE-5650A составляет 
Ошибка синхронизации шкал времени атомных часов с помощью спутников ГНСС составляет 3-5 наносекунд. [2], [3]
В расчете принимают ошибку синхронизации шкал времени атомных часов пунктов наблюдения и подвижных объектов равную σсинхронизации=5Е-9.
Вероятную ошибку определения времени движения сигналов рассчитывают по формуле:

Для принятых значений характеристик точности работы атомных часов и синхронизации шкал времени средняя квадратическая ошибка определения времени движения сигналов составляет: σt дв Сигн=7,071124380Е-09. Это значение в последующем используют для вычисления вероятной ошибки определения расстояний между подвижными объектами и пунктами наблюдения. Координаты подвижных объектов вычисляют решением задачи комбинированной засечки по измеренным расстояниям с использованием теоремы косинусов.
Метод определения координат подвижных объектов комбинированной засечкой по измеренным расстояниям с использованием теоремы косинусов показан на рисунке Фиг. 4. В точках А, В, С и D показаны антенны пунктов наблюдения, в точке О антенна подвижного объекта. Для упрощения рисунка высоты пунктов наблюдения приняты равными 0.
Координаты антенн ГШ определяют с максимально возможной точностью. Расстояния АО (ВО, СО, DO) определяют как произведение времени движения сигналов от антенны подвижного объекта до антенн ГШ и скорости распространения радиоволн. Определяют координаты ПО из треугольника АОВ.
Решением обратной геодезической задачи по координатам точек А и В определяют расстояние между точками: 
и дирекционный угол из точки А на точку В

Значение высоты подвижного объекта Н'ОБ в момент отправки сигналов первоначально условно принимают как сумму высоты полета ПО определенной с помощью высотомера (НО) и высоты центрального пункта наблюдения НА. По формуле Пифагора определяют горизонтальные составляющие расстояний между подвижным объектом (точка О) и пунктами наблюдения (точки А и В).

По теореме косинусов определяют горизонтальный угол

Определяют дирекционный угол из точки А на точку О'

Определяют координаты подвижного объекта в первом приближении

Используя программу «ГИС "Оператор" для силовых структур» по полученным координатам Х'O, Y'O, определяют высоту точки местности Н'O. По высоте Н'O и высоте полета подвижного объекта HO рассчитывают значение высоты подвижного объекта над уровнем моря в момент отправки сигналов 
По высоте объекта НОБ окончательно приводят расстояния АО и ВО к горизонту по формулам.

По теореме косинусов определяют горизонтальный угол

Определяют дирекционный угол с точки (В) на точку (О'')

Определяют координаты объекта

Для определения координат подвижных объектов в предложенном способе достаточно двух пунктов наблюдения зафиксировавших время поступления сигналов от подвижного объекта. Любой из треугольников АОВ, АОС, AOD, ВОС, BOD, COD может быть использован для определения координат. Это способствует повышению надежности и точности определения координат. При приеме сигналов тремя и более ПН, вычисление координат ПО может быть выполнено по формулам трилатерации применяемым в ГЛОНАСС.
Ошибки определения координат объектов определяют по круговым ошибкам определения координат пунктов наблюдения (σr) и ошибкам определения расстояний между ПН и ПО (σd) Учитывая то что координат ПО вычисляют наземными ЭВМ и в вычислениях значений тригонометрических функций реализованы наиболее точные алгоритмы, ошибками вычислений пренебрегают. Ошибки определения координат вычисляют по формуле:

Так как способы определения координат всех пунктов наблюдения одинаковы σr1=σr2, а расстояния определяются с использованием одинаковых часов σd1=σd2, уточненная формула расчета ошибок определения координат имеет вид:

Для определения влияния точности определения координат пунктов наблюдения (σri) на точность определения координат подвижных объектов в соответствии с [4] принимают: σri=1 см, σr2=10 см, σr3=50 м. Исходные данные и результаты вычислений помещены в таблицу «Зависимость ошибок определения времени движения радиоволн, расстояний, координат и дирекционных углов от удаления подвижных объектов и ошибок определения координат антенн пунктов наблюдения (σr) предложенным способом» Фиг. 5. Для расчетов в таблице приняты расстояния между подвижными объектами и пунктами наблюдения от 1000 до 300000 метров. Время движения сигналов от ПО до ПН определяют как частное от деления табличного значения расстояния на скорость распространения радиоволн. Ошибки определения времени движения сигналов определяют как произведение времени движения сигналов на величину вероятной ошибки рассчитанной по формуле 2. Ошибки определения расстояния между ПО и ПН определяют как произведение скорости распространения радиоволн на ошибки определения времени движения сигналов. Ошибки определения координат ПО для заданных характеристик точности определения координат антенн ПН (σri) и времени движения сигналов рассчитывают по формуле 3.
Определение дирекционных углов осей подвижных объектов.
Известен способ определения курса подвижных объектов с помощью инерциальной навигационной системы F175 английской компании CodaOctopus, с использованием двух GPS приемников. БИНС F175 при расстоянии между двумя GPS приемниками равном двум метрам и ошибке позиционирования 0,01 м, определяет курс подвижных объектов с точностью σ=0,1°. [5]
По аналогии с БИНС F175 углы осей подвижных объектов перемещающихся с небольшими скоростями (вертолетов и БЛА) определяют с использованием не менее двух антенн размещенных на корпусе ПО, поочередно коммутируемых к выходу УКВ передатчиков для отправки сигналов. Места размещения антенн ПО выбирают из условия максимального взаимного удаления в плоскостях, видимость которых с пунктов наблюдения при выполнении задачи данным объектом гарантированна.
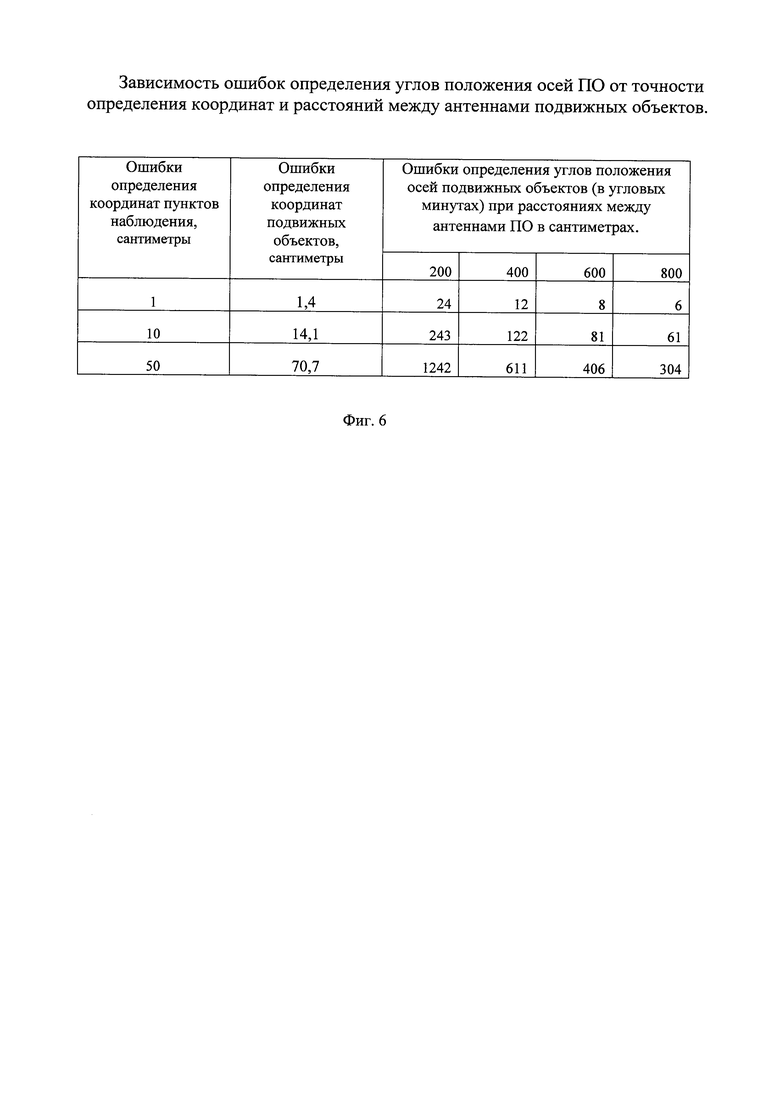
Расстояния между антеннами и их положение относительно осей подвижных объектов определяют заблаговременно и учитывают при вычислениях на центральном пункте наблюдения. Дирекционные углы осей ПО вычисляют из решения обратной геодезической задачи по координатам антенн. Ошибки определения дирекционных углов вычисляют как арксинус от ошибки определения координат, деленной на расстояние между антеннами. Результаты вычислений показаны в таблице «Зависимость ошибок определения углов положения осей ПО от точности определения координат и расстояний между антеннами подвижных объектов» Фиг. 6. Из таблицы видно, что точность определения угла, заявленная в описании БИНС F175 (0,1°) при таком способе вычислений может быть достигнута только при расстоянии между антеннами равном 8 метрам.
Для получения более высокой точности определения углов осей применяют метод вычислений по расстояниям между антеннами ПО, расстояниям между антеннами подвижных объектов и пунктов наблюдения и горизонтальному углу с использованием теоремы синусов.
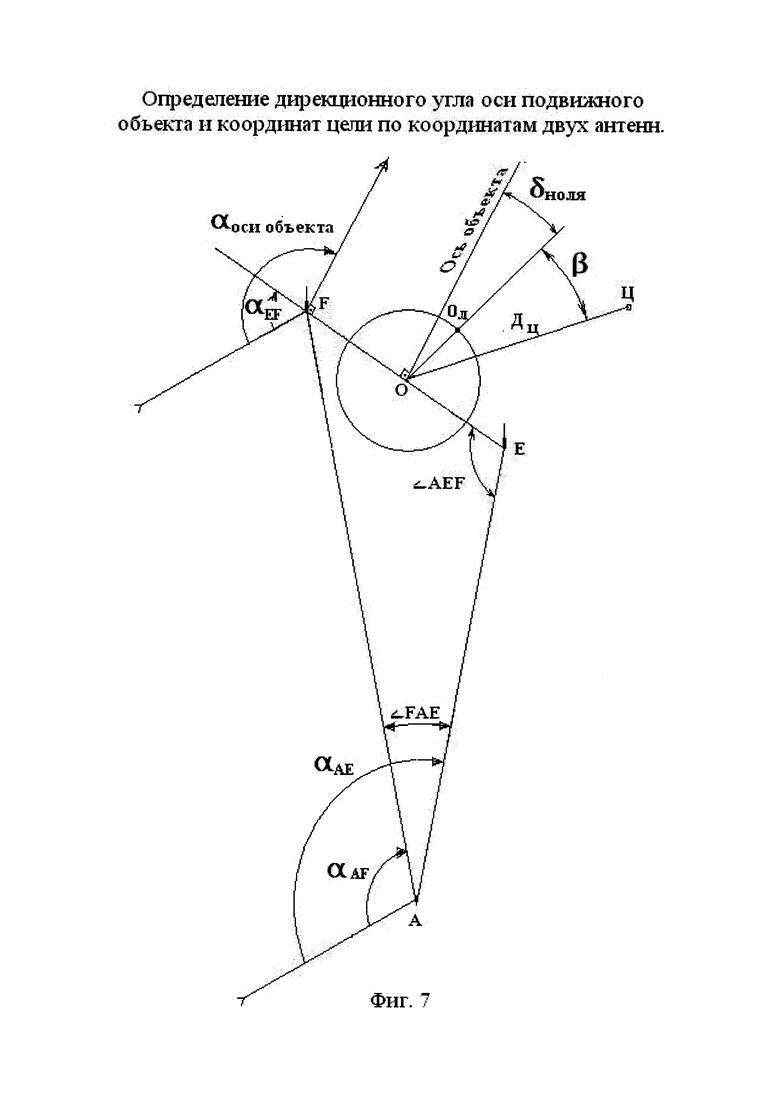
Схема определения дирекционных углов осей объектов показана на рисунке «Определение дирекционного угла оси подвижного объекта и координат цели по координатам двух антенн» Фиг. 7.
В точке А размещена антенна центрального пункта наблюдения. В точках F (XF,YF,HF) и Е (XE,YE,НЕ), показано положение проекций антенн ПО на горизонтальную плоскость проходящую через точку А. Ось подвижного объекта перпендикулярна линии FE. Для определения координат положения антенн, операторы включают процесс считывания высоты ПО и времени по бортовым атомным часам, антенные коммутаторы последовательно коммутируют первую и вторую антенны к передатчику, передатчик отправляет сигналы, содержащие считанные значения показаний бортовых приборов, пункты наблюдения принимают сигналы, вычисляют координаты антенн ПО (XF,YF,HF) и (XE,YE,НЕ).
1. Решением обратной геодезической задачи, по координатам антенны центрального пункта наблюдения A (XA,YA,НА) и координатам антенн объекта определяют дирекционные углы на точки αAF и αAE.
2. Определяет горизонтальный угол 
3. По времени движения сигнала из точки F до точки А, определяют наклонную дальность по формуле 
4. Приводят наклонную дальность к горизонту по формуле
5. По теореме синусов определяют горизонтальный угол  где EF - измеренное до начала движения расстояние между антеннами ПО.
где EF - измеренное до начала движения расстояние между антеннами ПО.
6. Определяют дирекционный угол 
7. Определяют дирекционный угол оси объекта 
Угол тангажа и крен осей подвижных объектов при необходимости определяют по координатам положения дополнительных антенн аналогичным способом.
Этот способ в значительной степени уменьшает влияние ошибок определения координат ПН на точность определения углов положения подвижных объектов в пространстве. Дирекционные углы продольных осей подвижных объектов, движущихся с большой скоростью, определяют решением обратной геодезической задачи по координатам нескольких точек прямолинейного участка траектории определенным предлагаемым способом.
Возможность передачи УКВ сигналов на рассматриваемые расстояния.
Известно, что на спутниках GPS установлены УКВ передатчики мощностью 50 ватт. Такая мощность передатчика позволяет обеспечить надежный прием сигналов спутников приемниками ГНСС навигаторов на расстоянии до 20000 км и выше. Известно, что для увеличения дальности связи в 2 раза, необходимо либо повысить чувствительность приемника в 4 раза, либо повысить мощность передатчика в 16 раз. Исходя из этого, для передачи сигналов с подвижных объектов на пункты наблюдения на дальность до 200 километров, выбирают УКВ-передатчики мощностью до 10 ватт. Для повышения надежности приема сигналов и точности измерений расстояний между подвижными объектами и ПУ отправляемые сигналы кодируют псевдослучайным кодом аналогичным коду ГНСС.
Возможность проведения синхронизации шкал времени атомных часов пунктов наблюдения и подвижных объектов с высокой точностью.
Известно, что синхронизация шкал времени спутников ГНСС проводится по результатам навигационно-временных измерений проводимых наземными станциями. При измерениях возникают погрешности, основными источниками которых согласно [6] являются:
1. Ошибки в определении положения и скорости спутников (Эфемериды - 25,1%),
2. Нестабильность гетеродинов (Часы спутника - 6,7%),
3. Неоднородность диэлектрической проницаемости ионосферы (Ионосфера - 27,9%),
4. Рефракция в тропосфере (Тропосфера - 39,1%),
5. Аппаратные ошибки измерения псевдо дальности в приемнике (Приемник - 1,1%).
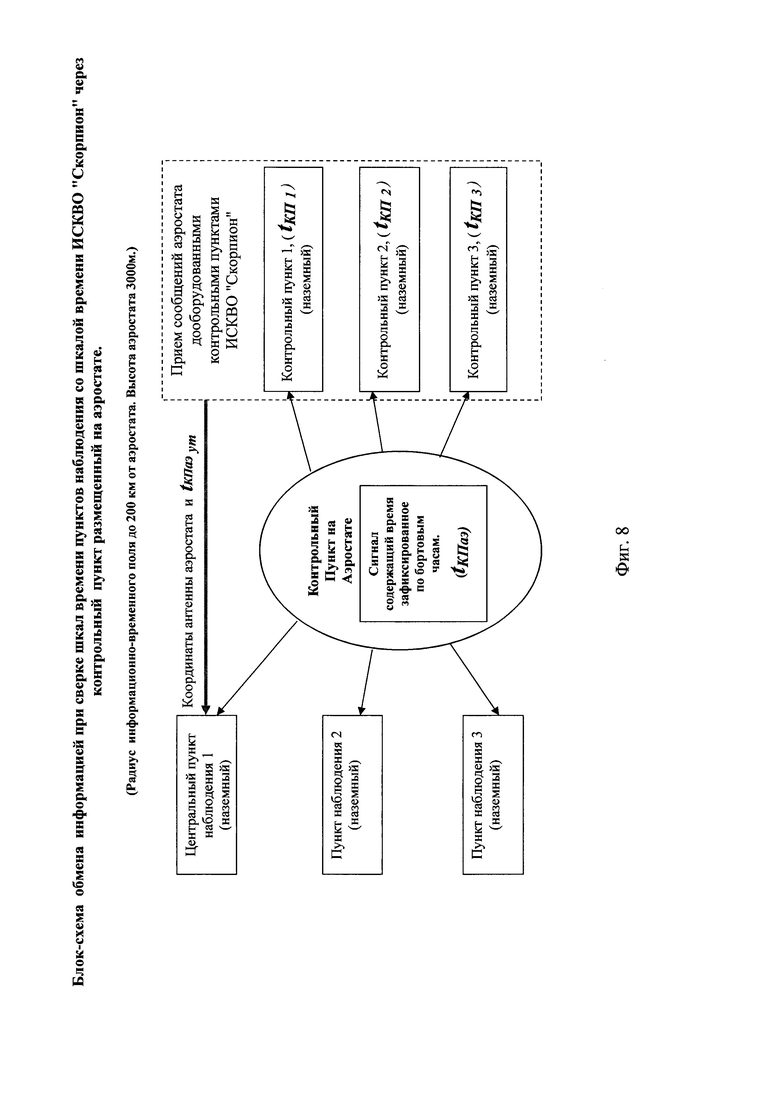
Для обеспечения синхронизации шкал времени атомных часов ПО и ПН в состав ИСКВО "Скорпион" вводят контрольные пункты на аэростатах (КПАЭ). Блок-схема обмена информацией при сверке шкал времени пунктов наблюдения и подвижных объектов со шкалой времени ИСКВО «Скорпион» через контрольный пункт на аэростате показан на Фиг. 8.
Для сверки шкал времени аэростат по заданной программе отправляет сигнал, содержащий время, зафиксированное по атомным часам аэростата (tКПАЭ). Наземные контрольные пункты ИСКВО фиксируют время поступления сигнала аэростата  Рассчитываю время движения сигнала между антеннами аэростата и контрольных пунктов
Рассчитываю время движения сигнала между антеннами аэростата и контрольных пунктов  как разницу времени регистрации сигнала по часам контрольных пунктов и времени отправки сигналов зафиксированного по часам аэростата. Определяют координаты аэростата и поправки шкал времени часов аэростата
как разницу времени регистрации сигнала по часам контрольных пунктов и времени отправки сигналов зафиксированного по часам аэростата. Определяют координаты аэростата и поправки шкал времени часов аэростата  по каждому контрольному пункту (КПj) принявшему сигнал по формуле
по каждому контрольному пункту (КПj) принявшему сигнал по формуле

По поправкам шкал времени определенным относительно каждого контрольного пункта ИСКВО "Скорпион" рассчитывают средние значения поправок  и уточненное значение времени отправки сигнала аэростатом по формуле
и уточненное значение времени отправки сигнала аэростатом по формуле 
Значения координат и уточненное время отправки сигнала аэростатом передают на Центральные пункт наблюдения потребителей, где аналогичным образом по координатам и времени отправки сигнала аэростатом определяют поправки шкал времени часов наземных пунктов наблюдения и подвижных объектов.
Так как траектории сигналов между контрольными пунктами ИСКВО "Скорпион", аэростатами и пунктами наблюдения не проходят через ионосферу и тропосферу, свыше 92% источников погрешностей синхронизации шкал времени ГНСС не влияют на точность синхронизации шкал времени часов в предложенном изобретении. Поэтому точность синхронизации шкал времени часов ПН достигаемая с помощью ИСКВО "Скорпион" выше чем точность синхронизации часов спутников GPS.
При использовании предложенного способа для малогабаритных подвижных объектов с программируемыми атомными таймерами проводят синхронизацию только атомных часов пунктов наблюдения.
Для реализации изобретения используют штатные пункты управления, дооборудованные атомными часами и другой предусмотренной изобретением аппаратурой. Передача сообщений между ПН и контрольными пунктами ИСКВО "Скорпион" осуществляют через закрытый сегмент передачи данных.
Отличие от уже известных решений.
Предлагаемый способ отличается от способа ГНСС тем, что непосредственно при определении координат и углов, он не зависит от наличия сигналов спутников. Траектории движения УКВ сигналов подвижных объектов в предлагаемом способе проходят значительно ниже тропосферы, а, следовательно, сигналы не подвержены тропосферной рефракции и влиянию метеоусловий на скорость распространения радиоволн, что способствует повышению точности определения координат. Точность предлагаемого способа не зависит от географической широты места, способ применим в приполярных и заполярных районах Земли без ограничений.
Отличием данного способа является то, что сигналы подвижных объектов содержат идентификационные данные, которые позволяют определять принадлежность и предназначение полученных сигналов. Это обстоятельство позволяет использовать информацию, получаемую от сторонних пунктов наблюдения (СПН) не участвующих в решении обозначенной задачи, но получивших сигналы подвижных объектов и зафиксировавших время их поступления по своим высокоточным часам. В этом случае органы управления более высокого звена определяют принадлежность сигналов полученных СПН, проводят сверку шкал времени ЦПН исполнителя и СПН и пересылают сообщения включающие время поступления сигналов ПО, поправки шкал времени и координаты СПН исполнителю. Сообщения, полученные от СПН удаленных в плоскости перпендикулярной траектории полета объекта, увеличивают точность определения координат объектов находящихся на большом расстоянии. Отличием является и то, что высоты полета ПО достаточно велики, длительность сигналов подвижных объектов мала, а УКВ приемники пунктов наблюдения работают в режиме радиоприема, что затрудняет обнаружение и подавление сигналов подвижных объектов средствами противоборствующей стороны. Отличием является то, что координаты и углы осей подвижных объектов определяются в пунктах непосредственно управляющих выполнением задачи подвижными объектами, что сокращает задержки принятия управленческих решений.
Анализ результатов вычислений приведенных в таблице Фиг. 5 показывает, что точность определения координат антенн подвижных объектов предложенным способом не превышает 15 мм при точности определения координат антенн ПН в 10 мм и 15 см при точности определения координат антенн ПН в 10 см. Ошибки определения дирекционных углов осей ПО определяют как арксинус от частного от деления ошибки определения координат на дальность до подвижного объекта. Результаты вычислений помещены в таблицу Фиг. 5.
Значения ошибок для дальностей в десятки километров значительно меньше угловой минуты. Что значительно превосходит точность существующих способов определения координат и углов удаленных подвижных объектов.
2. Способ, по П.1 отличающийся тем, что с целью определения корректур штатной навигационной аппаратуры (величин ошибок предстартового ориентирования ракет по направлению) подвижные объекты отправляют сигналы, содержащие идентификационные данные, текущее время, координаты, курс и высоту считанные с бортовой аппаратуры, пункты наблюдения принимают сигналы, рассчитывают координаты точек отправки сигналов и курс объектов.
Известен способ определения координат и курса воздушного судна (B.C.) (см., например, Лопаткин Д.В., Ипполитов С.В., Захарин А.В., Конотоп В.И., Ончуров С.В. Способ определения координат, курса и скорости воздушного судна, RU 2506541, 10.02.14 г.), основанный на формировании кодированного лазерного излучения с наземных лазерных ориентиров в направлении на воздушного судна (ВС), приеме лазерного излучения тремя приемниками, установленными на борту ВС, дешифрировании принятых сигналов и определении курса и координат ВС, на основе данных об азимутальных углах приемников излучения и базисных расстояниях и углах между бортовыми приемниками излучения. Данный способ сложен, имеет недостаточную точность и ограничен в применении территориально и погодными условиями.
Известно, что на современных боевых самолетах России устанавливают бесплатформенные инерциальные навигационные системы БИНС-СП-2М. При наличии сигналов ГНСС в гибридном режиме работы БИНС-СП-2М обеспечивают определение координат ПО со среднеквадратической ошибкой не превышающей 30 метров. В автономном режиме ошибка определения координат с помощью БИНС-СП-2М через час полета может составлять 1850 метров.
В целях повышения точности работы БИНС-СП-2М в условиях отсутствия ГНСС определяют и вводят корректуры координат и курса подвижных объектов в процессе полета. Для определения корректур высокоскоростные подвижные объекты на прямолинейном участке траектории полета отправляют несколько сигналов, содержащих идентификационные данные, текущие координаты, курс определенные навигационной аппаратурой и время, зафиксированное по бортовым атомным часам. ПН принимают сигналы и рассчитывают координаты и курс ПО в момент отправки сигналов.
Вертолеты (БЛА и аэростаты) определяют координаты и курс с использованием двух антенн установленных на корпусе ПО ранее описанным способом. Рисунок Фиг. 7.
Корректуры координат и курса определяют как разницу значений считанных с указателей навигационной аппаратуры подвижных объектов перед отправкой сигналов со значениями рассчитанными способ предложенным в изобретении.
3. Способ, по П.1 отличающийся тем, что с целью определения координат целей на вертолетах (БЛА, аэростатах) устанавливают не менее двух максимально взаимно удаленных антенн, антенные коммутаторы, дальномеры, высотомеры и другое оборудование. Расстояния между антеннами, положение цетра вертикальной оси вращения дальномера относительно центра линии соединяющей антенны и горизонтальный угол между осью вертолета и нулевым значением лимба дальномера δ нуля определяют заблаговременно и передают на централый пункт наблюдения. Схема определения координат объекта показана на рисунке Фиг. 7. В полете при обнаружении цели операторы наводят дальномеры на цель, включают процесс автоматического считывания дальности (Д ц), отсчета по лимбу дальномера на цель  высоты Нов и времени по бортовым атомным часам, последовательно через первую и вторую антенны передают сигналы, содержащие зафиксированные значения показаний бортовых приборов. Пункты наблюдения принимают сигналы и по полученным сигналам формируют и отправляют сообщения на ЦПН. На центральном пункте наблюдения по сигналам поступившим от ПО и сообщениям с других ПН, определяют коодинаты положения антенн (точки F и Е), центра линии соединяющей антенны (XO,YO) и высоту (HO). Определяют дирекционный угол визирной оси дальномера в момент фиксирования отсчета по цели по формуле:
высоты Нов и времени по бортовым атомным часам, последовательно через первую и вторую антенны передают сигналы, содержащие зафиксированные значения показаний бортовых приборов. Пункты наблюдения принимают сигналы и по полученным сигналам формируют и отправляют сообщения на ЦПН. На центральном пункте наблюдения по сигналам поступившим от ПО и сообщениям с других ПН, определяют коодинаты положения антенн (точки F и Е), центра линии соединяющей антенны (XO,YO) и высоту (HO). Определяют дирекционный угол визирной оси дальномера в момент фиксирования отсчета по цели по формуле: 
Приводят к горизонту дальность до цели определенную дальномером по формуле 
Определяют координаты цели решением прямой геодезической задачи

Используя программу «ГИС "Оператор" для силовых структур» по координатам ХЦ, YЦ определяют высоту цели НЦ.
В целях повышения надежности и точности определения координат, наведение дальномера на цель, нажатие кнопки для считывания отсчетов и отправки сигналов операторы осуществляют несколько раз.
4. Способ, по П. 1 отличающийся тем, что с целью определения координат точек падения снарядов при пристрелке удаленных целей, часть реактивных снарядов в заводских условиях дооборудуют дополнительными блоками, применение которых позволяет определять положение снарядов в полете.
В артиллерии известны способы определение установок для стрельбы на поражение, учитывающие реальные отклонения разрывов снарядов от цели. Достоинством этих способов является то, что они позволяют измерить отклонения разрывов, возникающие в результате ошибок учета метеорологических, геофизических и баллистических условий на полет снаряда. Но при стрельбе на дальности в десятки и тем более сотни километров, существующие средства разведки не позволяют точно измерить координаты положения снарядов на траектории полета и определить отклонения разрывов снарядов от цели.
Известно изобретение Способ стрельбы неуправляемыми снарядами с закрытых огневых позиций (см., например, Шипунов А.Г., Березин СМ., Морозов В.И., Голомидов Б.А., Шамин М.С., Сальников С.С., Крыльцов А.В. Способ стрельбы неуправляемыми снарядами с закрытых огневых позиций, RU 2236665, 20.09.2004. г.).
Сущность способа предложенного в изобретении RU 2236665 состоит в том что с помощью радара, использующего эффект Доплера, производят замеры радиальной скорости полета артиллерийского снаряда на участке траектории. По результатам измерений, используя математическую модель движения снаряда, идентифицируют метеобаллистические условия стрельбы. Техническим результатом в изобретении RU 2236665 является уменьшение ошибок метеобаллистической подготовки по дальности. Для достижения данного технического результата используется артиллерийская баллистическая станция, способная определять падение скорости снаряда на участке траектории. Далее производится корректировка угла прицеливания по таблицам стрельбы в зависимости от полученных результатов для начальной скорости и коэффициента торможения. Недостатком изобретения RU 2236665 является то, что в результате замеров учитывается влияние метеоусловий только на начальном участке траектории, что не позволяет учесть влияние всех факторов на отклонение снаряда от точки прицеливания. Недостатком является и то, что излучение радара в процессе замера скорости снарядов демаскирует артиллерийскую баллистическую станцию, которая неминуемо будет подвержена огневому воздействию противника.
Для достижения цели изобретения в заводских условиях на часть реактивных снарядов (PC) без нарушения баллистических и аэродинамических характеристик устанавливают дополнительные блоки, включающие программируемые атомные таймеры и другое предусмотренное изобретением оборудование. Эти снаряды используют как пристрелочные. Для учета влияния всех факторов на полет, определяют координаты положения PC контрольных точках траектории максимально приближенных к точке прицеливания. Для чего на нисходящем участке траектории намечают несколько контрольных точек, высоты которых обеспечивают радиовидимость снарядов с пунктов наблюдения. Высоты точек радиовидимости снарядов рассчитывают по формуле 1. По формулам внешней баллистики для выбранных высот вычисляют координаты контрольных точек и время их прохождения PC после старта. По номерам и времени прохождения контрольных точек, их координатам составляют программы отправки сигналов аппаратурой реактивных снарядов. Перед стрельбой вводят программы отправки сигналов в устройства памяти атомных таймеров PC и атомных часов ПН. Производят выстрел, в момент схода PC с направляющей запускают таймер, фиксируют время запуска таймера по атомным часам пункта наблюдения расположенного на огневой позиции. В полете при достижении установленных значений времени, таймеры инициируют отправку сигналов содержащих номера контрольных точек и реактивных снарядов.
Пункты наблюдения по атомным часам фиксируют время поступления сигналов, формируют и отправляют на центральный пункт наблюдения сообщения, содержащие время поступления сигнала, номера контрольных точек и снарядов полученные от аппаратуры PC, время запуска таймера, и номера пунктов наблюдения. Аналогичным образом производят четыре выстрела с темпом, обеспечивающим засечку сигналов каждого снаряда. На центральном пункте наблюдения поступившие сообщения преобразуют в формат электронных таблиц, сортируют по предназначению, номерам исполнителей, снарядов и контрольных точек. По отсортированным сигналам решают задачи определения координат положения снарядов в моменты отправки сигналов.
По координатам положения каждого пристрелочного снаряда в контрольных точках методом экстраполяции определяют координаты вероятных точек падения снарядов. По координатам вероятных точек падения снарядов определяют координаты центра рассеивания снарядов, его отклонения от точек прицеливания и корректуры установок для стрельбы на поражение. Корректуры установок для стрельбы на поражение полученные данным способом, фактически учитывают влияние всех факторов, вызвавших отклонения реальных траектории полета снаряда от теоретической на всей траектории полета. Предложенный способ применим для пристрелки любых других снарядов при условии создания оборудования предусмотренного данным изобретением, способного выдержать динамические нагрузки, возникающие в канале ствола или на направляющей.
В целях маскировки элементов боевого порядка, стрельба для определения координат точек падения пристрелочных снарядов может проводиться с временных позиций.
5. Способ, по П. 1 включающий доработку реактивных снарядов аналогичную П. 4., отличающийся тем, что с целью проверки формул внешней баллистики в условиях полигонов намечают траектории полета PC, выбирают контрольные точки траектории, вдоль траектории размещают пункты наблюдения, производят стрельбы, по результатам которых проверяют и если необходимо уточняют формулы внешней баллистики.
Известно, что формулы и таблицы теории внешней баллистики, применяемые в настоящее время, разрабатывались с помощью средств измерений и вычислений, доступных в первой половине 20 века. Существующие формулы не учитывают изменение геофизических и метеорологических параметров вдоль траектории полета снаряда. При дальностях стрельбы соизмеримых с размерами зон в пределах, которых допустимо использование постоянных метеорологических параметров принятый способ расчета не приводит к значительным ошибкам. Современные и перспективные артиллерийские системы имеют дальности стрельбы, значительно превышающие дальность стрельбы артиллерии, для которой были разработаны формулы и таблицы. При больших дальностях стрельбы полет снарядов может проходить на участках траектории, на которых метеорологические параметры, существенно отличаются от параметров в точке выстрела. Не учет изменений этих параметров влечет отклонения снарядов от точек прицеливания. Современные средства радиолокации, вычислений и интернет могут позволить учитывать распределение реальных метеорологических параметров по высотам и направлениям движения снарядов. Анализ влияния может позволить выявить более точные математические зависимости и, возможно, изменить методику учета метеорологических элементов при расчете установок для стрельбы и формулы внешней баллистики.
Известно, что для более точного измерения параметров движения снарядов разработаны и приняты на вооружение «Мобильный автоматизированный измерительный комплекс Траектория» [7] и «Мобильная однопунктовая система для внешнетраекторных измерений Сажень-ТА» [8] и другие средства.
Разработанные комплексы обладают высокой точностью, но не позволяют непрерывно измерять параметры полета снарядов на всей траектории перспективных артиллерийских систем.
Для решения этой задачи в заводских условиях на реактивных снарядах проводятся доработки аналогичные доработке описанной в П. 4. В условиях полигона, перед стрельбой намечают траектории полета PC. Вдоль траекторий размещают пункты наблюдения на удалении от траектории из условия радиовидимости всех точек траектории одновременно не менее чем с двух ПН, определяют геодезические координаты УКВ антенн пунктов наблюдения. Рассчитывают установки для стрельбы, определяют периодичность отправки сигналов. По формулам внешней баллистики рассчитываю координаты контрольных точек траектории и время прохождении реактивными снарядами этих точек. По номерам и времени прохождения контрольных точек, их координатам составляют программы отправки сигналов аппаратурой реактивных снарядов. Перед стрельбой вводят программы отправки сигналов в устройства памяти атомных таймеров PC и атомных часов всех участвующих в выполнении задачи пунктов наблюдения. Проводят стрельбы, в моменты схода PC с направляющих запускают таймеры, фиксируют время запуска таймеров по атомным часам пунктов наблюдения расположенных на огневых позициях. В полете при достижении установленных значений времени, таймеры инициируют отправку сигналов содержащих номера сигналов и реактивных снарядов. Пункты наблюдения по атомным часам фиксируют время поступления сигналов, формируют и отправляют на центральный пункт наблюдения сообщения, полученные от PC сигналы содержащие время запуска таймера, номера снарядов и сигналов, время поступления сигналов на ПН и номера пунктов наблюдения. На центральном пункте наблюдения поступившие сообщения преобразуют в формат электронных таблиц, сортируют по предназначению, номерам исполнителей, снарядов и сигналов. По отсортированным сигналам решают задачи определения координат контрольных точек и других значений параметров реальной траектории полета снарядов.
Процесс повторяют в различных геофизических и метеобаллистических условиях, для получения статистических данных. По полученным статистическим данным определяют средние значения параметров траектории полета снарядов, их отклонения от теоретических, проверяют и уточняют формулы расчета параметров траектории и формулы учета влияния отклонений условий стрельбы от табличных на полет снарядов. Этот способ позволяет в случае необходимости изменить подход к учету влияния метеоусловий на расчет установок для стрельбы.
6. Способ, по П. 1 отличающийся тем, что с целью повышения точности определения координат ПО и увеличения навигационно-временного поля ИСКВО "Скорпион" в состав комплекса вводят контрольные пункты (КП) на аэростатах, на КП и подвижных объектах устанавливают дополнительные блоки с атомными часами и другим оборудованием, определяют координаты дополнительных антенн наземных КП.
Известно, что в рамках федеральной целевой программы «Глобальные навигационные системы» и в соответствии с «Российским радионавигационным планом на 2008-2015 годы» предусмотрены ремонтно-восстановленные работы импульсно-фазовых, разностно-дальномерных радионавигационных систем РСДН-10 «Чайка» и фазовых радионавигационных систем дальней навигации РСДН-20 «Альфа». Эти станции способны на удалении до 600 километров обеспечивать объекты координатами со среднеквадратической ошибкой от 100 до 300 м. На смену им разработана ИСКВО "Скорпион". ИСКВО "Скорпион" в условиях отсутствия сигналов ГНСС формирует радионавигационное поле ИФРНС на удалении до 1000 км от ведущей станции со средней квадратичной погрешностью определения координат 500 м. При наличии сигналов ГНСС, в дифференциальном режиме погрешность определения координат с помощью ИСКВО "Скорпион" не превышает 50 м.
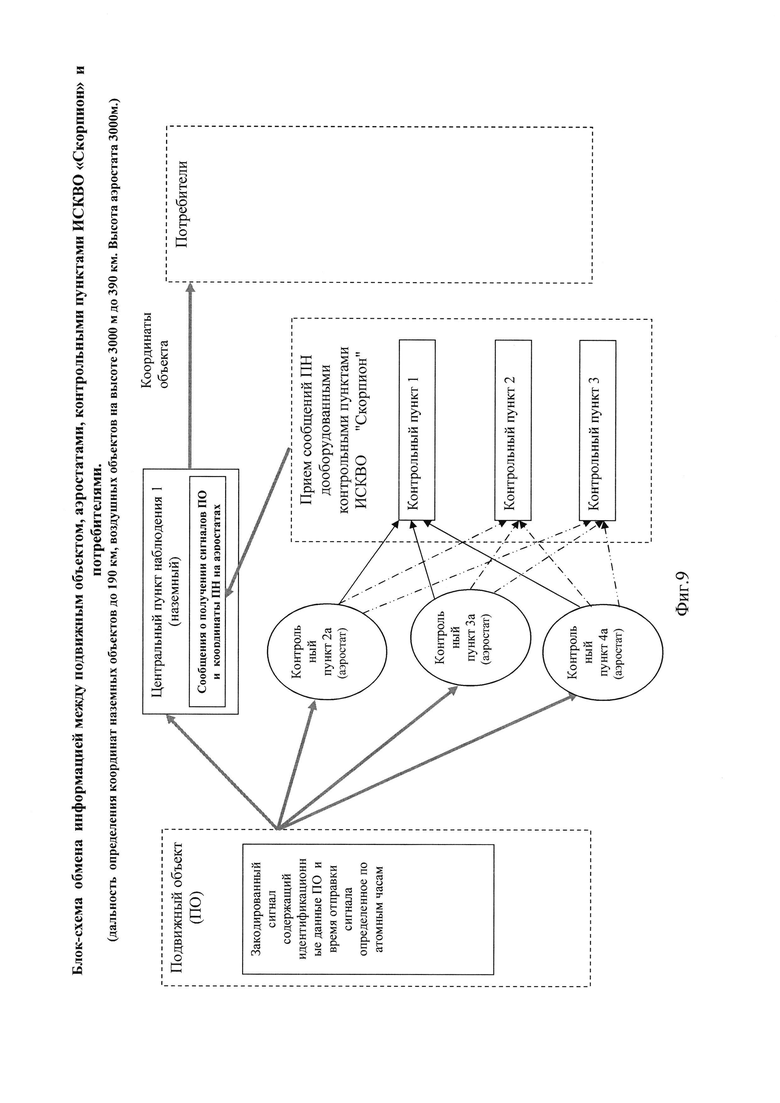
Для определения координат способом, предложенным в изобретении, подвижные объекты передают радиосигналы, содержащие идентификационные данные и время отправки определенное по бортовым атомным часам. Учитывая то, что аэростаты под воздействием атмосферы меняют свое положение, для определения координат их положения в момент поступления сигналов от подвижных объектов аппаратура каждого аэростата фиксирует время поступления сигналов по своим бортовым часам, ретранслирует сигналы на контрольные пункты ИСКВО «Скорпион» добавив номер аэростата и время поступления сигнала. Наземные контрольные пункты фиксируют время поступления сигналов аэростатов по своим часам. Рассчитываю время движения сигналов между антеннами аэростатов и наземных контрольных пунктов ИСКВО как разницу времени регистрации сигналов по часам контрольных пунктов и времени отправки сигналов по часам аэростатов, определяют расстояния и координаты аэростатов. Определяют время движения сигналов подвижных объектов до каждого аэростата как разницу времени фиксации поступления сигналов на аэростат и времени отправки сигнала по часам подвижных объектов. Определяют расстояния между точками положения антенн ПО в момент отправки сигналов и точками положения антенн аэростатов в моменты поступления сигналов подвижного объекта. По расстояниям и координатам аэростатов определяют координаты ПО. Отправляют координаты подвижных объектов через закрытый сегмент передачи данных на адрес электронной почты центрального пункта наблюдения идентифицируемый по первой группе сигнала подвижного объекта.
Увеличение координатно-временного поля ИСКВО "Скорпион" достигается за счет применения контрольных пунктов на аэростатах. При высотах аэростатов 3000 м радиус покрытия дополнительным навигационно-временным полем составляет 190 км по наземным объектам и 390 км по воздушным. Блок-схема обмена информацией между подвижным объектом, аэростатами, контрольными пунктами ИСКВО «Скорпион» и потребителями показана на Фиг. 9.
Краткое описание чертежей
Фиг. 1 Блок-схема обмена информацией между подвижным объектом, наземными пунктами наблюдений, и потребителями.
Фиг. 2 Зависимость дальности радиовидимости от высот подвижных объектов и пунктов наблюдения над поверхностью земли
Фиг. 3 Характеристики доступных и перспективных компактных атомных часов
Фиг. 4 Метод определения координат подвижных объектов комбинированной засечкой по измеренным расстояниям с помощью теоремы косинусов.
Фиг. 5 Таблица "Зависимость ошибок определения времени движения радиоволн, расстояний, координат и дирекционных углов от удаления подвижных объектов и ошибок определения координат пунктов наблюдения (σr) предложенным способом".
Фиг. 6 Зависимость ошибок определения углов положения осей ПО от точности определения координат и расстояний между антеннами подвижных объектов.
Фиг. 7 Определение дирекционного угла оси подвижного объекта и координат цели по координатам двух антенн.
Фиг. 8 Блок-схема обмена информацией при сверке шкал времени пунктов наблюдения со шкалой времени ИСКВО "Скорпион" через контрольный пункт, размещенный на аэростате.
Фиг. 9. Блок-схема обмена информацией между подвижным объектом, аэростатами, контрольными пунктами ИСКВО «Скорпион» и потребителями.
Список использованных источников:
1. Стандарты частоты рубидиевые FE-5650A. Руководство по эксплуатации. ГЖКД.468753.001 РЭ. 2015 г.
2. Методы сличения разнесенных часов
1). Г.Н. Палий, Е.В. Артемьева Синхронизация высокоточных мер времени и частоты. Москва, «Издательство Стандартов» 1976, с. 168
2) C. Audoin, B. Guinot. "Les Fondements de la Mesure du Temps" Paris, Masson. 1998 (перевод «Измерение времени» Москва, Техносфера 2002, с. 399)
3. Исследование эталона времени и частоты на основе первичных стандартов. Елюбаев Б.Ш., ученый хранитель государственного эталона времени и частоты, ЮКФ РГП «КазИнМетр»
4 «Метод спутниковых геодезических измерений», приведены параметры, характеризующие точность определения положения. Таблица 4.
http://wiki.cadastre.ru/doku.php?id=metod_sputnikovyih#fn_7
5. Инерциальная навигационная система F175
http://www.codaoctopus.com/products/f175
http://www.demetra5.kiev.ua/ru/catalog/sistemu-pozitsionirovaniya-i-orientatsii/F175/2?search=
6. Презентация «Функциональное дополнение к ГНСС ГЛОНАСС на основе псевдоспутников… ООО «ВедаПроект» и Концерн ПВО «Алмаз-Антей»», Слайд 38, Сайт -.
http://www.myshared.ru/slide/745284/
http://www.docme.ru/doc/567152/sistemy-lokal_noj-navigacii
7. Мобильный автоматизированный комплекс «ТРАЕКТОРИЯ»
http://www.ntiim.ru/info.php?x=traektor
8. ММКОС «Сажень-ТА», мобильная одноггунктовая система для внешнетраекторных измерений, http://www.arms-expo.ru/armament/samples/1603/72321/
9. «Время повышенной точности», Российская газета - Федеральный выпуск №7369 (203), Игорь Зубков, 10.09.2017, https://rg.ru/2017/09/10/v-rf-sozdali-sverhtochnve-chasy-pozvoliaiushchie-uluchshit-sputnikovuiu-navigaciiu.html
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ создания высокоточного, защищенного координатного поля в целях обеспечения условий для эффективного выполнения задач как при отсутствии и так при наличии сигналов ГНСС. | 2024 |
|
RU2839049C1 |
| Система мониторинга координат спускаемых космических объектов или их аппаратов в атмосфере Земли и их диспетчерского контроля | 2017 |
|
RU2659376C1 |
| ГИРОСКОПИЧЕСКАЯ НАВИГАЦИОННАЯ СИСТЕМА ДЛЯ ПОДВИЖНЫХ ОБЪЕКТОВ | 2006 |
|
RU2308681C1 |
| СПОСОБ УГЛОВОЙ ОРИЕНТАЦИИ ОБЪЕКТА | 2015 |
|
RU2580827C1 |
| Способ определения отклонений реальных метеорологических условий от табличных, учитываемых при расчете установок для стрельбы артиллерии | 2019 |
|
RU2700709C1 |
| СПОСОБ ПОВЫШЕНИЯ ПОМЕХОУСТОЙЧИВОСТИ ИНТЕГРИРОВАННОЙ СИСТЕМЫ ОРИЕНТАЦИИ И НАВИГАЦИИ | 2011 |
|
RU2498335C2 |
| СИСТЕМА ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ПОДВИЖНОГО ОБЪЕКТА ПО СИГНАЛАМ ГЛОБАЛЬНЫХ НАВИГАЦИОННЫХ СПУТНИКОВЫХ СИСТЕМ | 2012 |
|
RU2490665C1 |
| СИСТЕМА ПРИЦЕЛИВАНИЯ ОРУЖИЯ | 2021 |
|
RU2784528C1 |
| СПОСОБ УПРАВЛЕНИЯ БЕСПИЛОТНЫМ ЛЕТАТЕЛЬНЫМ АППАРАТОМ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2008 |
|
RU2390815C1 |
| МНОГОФУНКЦИОНАЛЬНАЯ НАВИГАЦИОННАЯ СИСТЕМА ДЛЯ ПОДВИЖНЫХ НАЗЕМНЫХ ОБЪЕКТОВ | 2015 |
|
RU2603821C2 |
Изобретение относится к области определения координат подвижных объектов (ПО) и может использоваться для определения координат удаленных подвижных объектов в условиях отсутствия ГНСС. Расстояния между антеннами подвижных объектов и пунктов наблюдения определяются как произведение времени движения сигналов и скорости распространения радиоволн. Для определения времени движения сигналов на подвижных объектах и в пунктах наблюдения установлены дополнительные блоки, включающие атомные часы (таймеры), дальномеры, высотомеры и аппаратуру считывания показаний бортовых приборов, УКВ приемопередатчики, антенны, блоки формирования и кодирования сигналов и другое оборудование. Время движения сигналов определяется как разница времени регистрации сигналов подвижных объектов по часам пунктов наблюдения и времени отправки сигналов по часам подвижных объектов. Пункты наблюдения (ПН) размещаются на земле или на привязных аэростатах. Координаты антенн ПН, размещенных на земле, определяются заблаговременно, координаты антенн ПН на аэростатах определяются в момент поступления сигналов от ПО. Сигналы, отправляемые подвижными объектами, содержат служебную информацию, предназначенную для идентификации их принадлежности и предназначения. Курс скоростных объектов определяется по координатам положения нескольких точек на прямолинейном участке траектории полета. Углы положения осей низкоскоростных подвижных объектов определяются по координатам не менее двух УКВ антенн, размещенных на корпусе ПО. Технический результат заключается в повышении точности определения координат. 5 з.п. ф-лы, 9 ил.
1. Способ определения координат и углов положения осей подвижных объектов с помощью атомных часов, установленных на объектах и в пунктах наблюдения, включающий установку на подвижных объектах (ПО) и в пунктах наблюдения (ПН) дополнительных блоков в зависимости от выполняемых задач, состоящих из атомных часов, дальномеров, высотомеров, устройств считывания цифровых значений параметров аппаратуры, установленной на ПО, блоков формирования, кодирования, отправки, приема, раскодирования сигналов, УКВ приемопередатчиков, антенн, антенных коммутаторов, вычислительных устройств и источников питания, выбор положения, размещение ПН стационарно на земле или на привязных аэростатах, определение координат антенн ПН, размещенных стационарно заблаговременно, координат антенн ПН на аэростатах в момент поступления сигналов от ПО, проведение синхронизации шкал времени атомных часов и юстировки системы, определение координат, отличающийся тем, что с целью определения координат подвижные объекты передают кодированные псевдослучайным кодом радиосигналы, содержащие служебную информацию, включающую установленное обозначение факта определения координат подвижных объектов, идентификационные номера потребителей, высоты объектов над поверхностью земли, определенные с помощью высотомеров, поправки шкал времени часов подвижных объектов, порядковые номера сигналов, номера антенн, время отправки сигналов, зафиксированное по атомным часам ПО, пункты наблюдения принимают сигналы, по своим часам фиксируют время их поступления, формируют и отправляют через закрытый сегмент передачи данных на центральные пункты наблюдения сообщения, содержащие идентификационные номера ПН, полученные сигналы ПО, и время их поступления, где определяют время движения сигналов как разницу времени регистрации сигналов подвижных объектов по часам каждого пункта наблюдения и времени отправки сигналов, зафиксированного по часам подвижных объектов, при определении времени движения сигналов учитывают задержки распространения сигналов из-за длины соединительных кабелей, времени коммутации и формирования сигналов, определяют расстояния как произведение времени движения сигналов и скорости распространения радиоволн, определяют координаты подвижных объектов решением задачи комбинированной засечки по измеренным расстояниям и координатам не менее двух пунктов наблюдения с использованием теоремы косинусов и программы «ГИС "Оператор" для силовых структур», определяют углы положения осей подвижных объектов, движущихся с большими скоростями, по координатам не менее чем двух точек прямолинейного участка траектории, углы положения осей объектов, перемещающихся с небольшими скоростями, по расстояниям между антеннами ПН и ПО и расстояниям между антеннами ПО с использованием теоремы синусов,
2. Способ по п.1, отличающийся тем, что с целью определения корректур штатной навигационной аппаратуры (величин ошибок предстартового ориентирования по направлению ракет) подвижные объекты на прямолинейных участках траектории полета отправляют серию сигналов, содержащих идентификационные данные ПО, текущие координаты и курс, определенные навигационной аппаратурой, и время отправки, зафиксированное по атомным часам, ПН принимают сигналы и отправляют сообщения на центральные пункты наблюдения, где по сообщениям, поступившим от ПН и ПО, рассчитывают координаты положения ПО в моменты отправки сигналов и действительный курс ПО, сравнивают расчетные значения координат и курса с зафиксированными бесплатформенными инерциальными навигационными системами в момент отправки сигналов, определяют корректуры координат и курса ПО.
3. Способ по п.1, отличающийся тем, что для определения координат целей разведывательные вертолеты (БЛА, аэростаты) дооборудуют атомными часами, дальномерами, высотомерами, антенными коммутаторами и двумя (тремя) максимально взаимно удаленными антеннами, расстояния между антеннами, положение осей дальномеров относительно антенн определяют заблаговременно и передают на ПН, в полете при обнаружении целей операторы наводят дальномеры на цели, включают процесс считывания времени, дальностей, углов поворота дальномеров на цели и высот полета, последовательно через первую и вторую антенны отправляют сигналы, содержащие идентификационные данные объектов, номера антенн, время, зафиксированное по часам, и данные, считанные с дальномеров и высотомеров, пункты наблюдения принимают сигналы и по полученным сигналам формируют и отправляют сообщения на центральные пункты наблюдения, где по сигналам, поступившим от ПО, и сообщениям от ПН определяют координаты антенн, углы осей ПО, координаты дальномеров, дирекционные углы с дальномеров на цели и координаты целей.
4. Способ по п.1, отличающийся тем, что достигаемым техническим результатом являются координаты точек падения специальных пристрелочных снарядов при стрельбе по целям, находящимся на значительном удалении, для чего проводят заводские доработки части штатных снарядов под пристрелочные, не нарушающие их технические и баллистические характеристики установкой дополнительных блоков, включающих атомные часы, блоки формирования сигналов, УКВ передатчики и антенны, определяют установки для прицеливания, намечают на траекториях полета несколько точек, максимально приближенных к цели и имеющих радиовидимость с ПН, выполняют синхронизацию часов, рассчитывают и вводят значения времени подачи сигналов передатчиками снарядов при достижении намеченных точек, производят 4 выстрела пристрелочными снарядами, в полете в расчетное время передатчики снарядов отправляют сигналы, содержащие служебную информацию и время отправки, пункты наблюдения фиксируют по атомным часам время поступления сигналов, формируют и отправляют на центральные пункты наблюдения сообщения, содержащие сигналы, полученные от снарядов, номера пунктов наблюдения и время поступления сигналов, где решают задачи определения координат положения снарядов в моменты отправки сигналов, по координатам точек положения каждого пристрелочного снаряда методом экстраполяции определяют координаты точек соприкосновения с землей, по рассчитанным координатам определяют их средние значения.
5. Способ по п.1, отличающийся тем, что достигаемым техническим результатом являются координаты и время положения снарядов, на всей траектории полета позволяющие проверить и в случае необходимости уточнить формулы внешней баллистики, включающий доработку снарядов в заводских условиях, сохраняющую вес, центровку масс и баллистические характеристики установкой дополнительных блоков, включающих атомные часы, блоки формирования сигналов, УКВ передатчики с антеннами и источниками питания, для достижения результата намечают траектории полета PC, вдоль траекторий размешают необходимое количество пунктов наблюдения, перед стрельбой определяют установки для прицеливания, рассчитывают параметры теоретических траекторий полета, определяют периодичность и время отправки сигналов на траекториях, производят синхронизацию часов и ввод значений времени отправки сигналов в дополнительные блоки снарядов, после выстрела в расчетное время передатчики снарядов отправляют сигналы, содержащие номера снарядов и сигналов, время отправки, зафиксированное по атомным часам, пункты наблюдения принимают сигналы, фиксируют по своим часам время их поступления, после завершения полетов снарядов передают сведения на центральные пункты наблюдения, где по информации полученной с ПН рассчитывают значения параметров реальных траекторий полета снарядов, для получения необходимых статистических данных процесс повторяют в различных геофизических и климатических условиях, по полученным данным определяют средние значения параметров траектории полета снарядов, их отклонения от теоретических, проверяют и в случае необходимости уточняют формулы расчета траекторий и формулы учета влияния отклонений условий стрельбы от табличных на полет снарядов.
6. Способ по п.1, отличающийся тем, что с целью повышения точности определения координат на подвижных объектах и наземных контрольных пунктах ИСКВО "Скорпион" согласно п. 1 устанавливают дополнительные блоки с атомными часами и применяют предложенный способ определения координат, с целью увеличения координатного поля ИСКВО "Скорпион" в состав комплекса вводят пункты наблюдения, размещенные на аэростатах, имеющих аналогичные дополнительные блоки, и применяют способ определения координат подвижных объектов с помощью аэростатов согласно п. 1, с целью увеличения временного поля контрольных пунктов ИСКВО "Скорпион" проводят сверку шкал времени контрольных пунктов со шкалами времени пунктов наблюдения через аэростаты, передающие по заданной программе сигналы, содержащие служебную информацию, и время, зафиксированное по атомным часам аэростатов, контрольные пункты ИСКВО принимают сигналы, определяют время движения сигналов, расстояния и координаты антенн аэростатов на момент отправки сигналов по нескольким контрольным пунктам, определяют поправки шкал времени часов аэростатов по каждому КП, средние значения поправок и уточненные значения времени отправки сигналов аэростатами, отправляют координаты аэростатов и уточненные значения времени отправки сигналов аэростата на центральные пункты наблюдения, где аналогичным способом определяют поправки шкал времени часов наземных пунктов наблюдения и ПО.
| СПОСОБ (ВАРИАНТЫ) И СИСТЕМА ДЛЯ ОПРЕДЕЛЕНИЯ ПОЛОЖЕНИЯ ОБЪЕКТА | 1990 |
|
RU2084916C1 |
| СПОСОБ И СИСТЕМА ПОЗИЦИОНИРОВАНИЯ | 1997 |
|
RU2161318C2 |
| СПОСОБ ДИНАМИЧЕСКОГО ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ МОБИЛЬНЫХ ОБЪЕКТОВ | 2016 |
|
RU2624790C1 |
| US 5696514 A, 09.12.1997 | |||
| US 2003016171 A1, 23.01.2003. | |||

