Область техники
Изобретение относится к области торговли, в частности к доставке беспилотными летательными аппаратами. Конкретнее изобретение относится к методам доставки приема и выдачи грузов с помощью беспилотных летательных аппаратов.
Предшествующий уровень техники
В настоящее время известен способ доставки посылок «Почтой России» в котором, различным адресатам посылки разносит почтальон. Известный способ удобен благодаря логистике почтовых отправлений, а так же большому количеству отделений расположенных вблизи многоквартирных домов. Но вышеупомянутый способ не является экономичным, так как не мало средств уходит на заработную плату почтальонов.
Так же известны способы доставки с помощью беспилотных летательных аппаратов описанные компанией Amazon. Способы в целом описывают доставку при помощи беспилотных летательных аппаратов, где сначала закрепляют идентификатор пользователя, затем определяют место во дворе, на которое будет доставлена посылка или товар, и после получения заказа от пользователя или посылки на имя пользователя, отправляют беспилотный летательный аппарат, используя систему навигации. Такой способ экономичен для компании, так как нет необходимости платить почтальонам или курьерам, но способ имеет и свой недостаток. Описанный способ не подходит для использования в крупном городе с многоквартирными домами, так как большинство жителей городов не имеет своего земельного участка, а имеет лишь почтовый ящик который находится внутри многоквартирного дома, куда не добраться беспилотному летательному аппарату, так же существующие почтовые ящики не подходят для взаимодействия с беспилотным летательным аппаратом, а следовательно и осуществление доставки жителю многоквартирного дома описанным способом становиться невозможным.
Так же известны варианты доставки грузов с помощью беспилотных летательных аппаратов в которых идентификаторы пользователя и место куда помещают груз располагают на фасаде многоквартирного дома или офиса. Такой способ тоже имеет свои недостатки. Во-первых зачастую это ведет к вмешательству в конструкцию многоквартирного дома. Во-вторых место куда помещают груз должно быть достаточно объемным, что бы туда мог помещаться груз различных габаритов и форм, а это приводит к тому что необходимо занять большую площадь в пересчете под каждую отдельную квартиру или офис.
Таким образом, указанные выше и другие аналогичные решения не решают всех указанных проблем одновременно.
Задача, которую поставил перед собой разработчик способа доставки грузов, состоит в разработке такого способа, который позволил бы осуществлять прием и выдачу грузов при минимальном использовании пространства при доставке грузов беспилотными летательными аппаратами жителям многоквартирных домов и офисов.
Технический результат способа доставки грузов, заключается в уменьшении площади необходимой для осуществления приема и выдачи груза при доставке беспилотными летательными аппаратами жителям многоквартирных домов, в обеспечении приема и выдачи груза без вмешательства в конструкцию здания, полной автоматизации процесса доставки, замене отделений почты на автоматизированные хранилища.
Раскрытие изобретения
Сущность способа приема груза, заключается в следующем, сначала груз у беспилотного летательного аппарата при доставке принимают автоматически при помощи механизма имеющего идентификатор связанный с хранилищем и курьерскую область, куда помещает груз беспилотный летательный аппарат, так же получают информацию об идентификаторе получателя груза при помощи системы управления хранилища по средствам связи от беспилотного летательного аппарата либо системы управления доставкой, либо груз сам содержит идентификатор для дальнейшего распознавания получателя, далее с помощью механизма перемещения и системы управления хранилища, перемещают груз с курьерской области в хранилище грузов, предназначенное для грузов множества пользователей. С помощью устройств связанных с системой управления хранилища, могут идентифицировать получателя груза, после этого груз перемещают при помощи механизма перемещения и системы управления хранилища, с хранилища грузов в пользовательскую область, откуда получатель груза забирает свой груз. Так же могут груз перемещать в хранилище, в определяемую системой управления хранилища ячейку, которую блокируют замочным механизмом, далее с помощью устройств связанных с системой управления хранилища, идентифицируют получателя груза, после этого с помощью системы управления хранилища разблокируют запертую ячейку хранилища в которой хранится груз и дают возможность получателю груза забрать груз с хранилища самостоятельно. Идентификатор связанный с хранилищем может представлять собой табличку с символами или датчики распознаваемые беспилотными летательными аппаратами, а курьерская область может быть выполнена в виде механизма имеющего вид полки перемещающей внутрь хранилища груз по принципу лифта. Пользовательскую область могут использовать для приема груза у отправителя груза, а информацию об идентификаторе получателя и другую информацию необходимую для доставки, принимать у отправителя который вводит на устройстве связанном с системой управления хранилища, либо указывает на упаковке груза, а курьерскую область при этом используют для передачи груза беспилотному летательному аппарату. Ячейки хранилища так же могут использовать для отправки груза, причем отправитель груза сам помещает груз в ячейку хранилища, а информацию об идентификаторе получателя и другую информацию необходимую для доставки, принимают у отправителя который вводит на устройстве связанном с системой управления хранилища, либо указывает на упаковке груза, а курьерскую область используют для передачи груза беспилотному летательному аппарату. Пользователя могут информировать о доставке груза в хранилище, и давать возможность отслеживания груза.
По альтернативному варианту способ приема груза, заключается в том, что при помощи беспилотного летательного аппарата груз перемещают внутрь хранилища имеющего идентификатор и систему управления хранилища, так же получают информацию об идентификаторе получателя груза при помощи системы управления хранилища по средствам связи от беспилотного летательного аппарата либо системы управления доставкой, либо груз сам содержит идентификатор для дальнейшего распознавания получателя, далее хранят груз до востребования. Так же могут с помощью устройств, связанных с системой управления хранилища, идентифицировать получателя груза, после этого груз переместить при помощи механизма перемещения и системы управления хранилища, с хранилища грузов в пользовательскую область, откуда получатель груза забирает свой груз. Так же могут груз перемещать в хранилище, в ячейку определяемую системой управления хранилища, либо беспилотным летательным аппаратом, либо системой управления доставкой, которую блокируют замочным механизмом, далее с помощью устройств связанных с системой управления хранилища, идентифицируют получателя груза, после этого с помощью системы управления хранилища разблокируют запертую ячейку хранилища в которой хранится груз и дают возможность получателю груза забрать груз с хранилища самостоятельно. Пользовательскую область могут использовать для приема груза у отправителя груза, а информацию об идентификаторе получателя и другую информацию необходимую для доставки, принимать у отправителя который вводит на устройстве связанном с системой управления хранилища, либо указывает на упаковке груза, а беспилотный летательный аппарат при этом используют что бы забрать груз с хранилища. Ячейки хранилища так же могут использовать для отправки груза, причем отправитель груза сам помещает груз в ячейку хранилища, а информацию об идентификаторе получателя и другую информацию необходимую для доставки, принимают у отправителя который вводит на устройстве связанном с системой управления хранилища, либо указывает на упаковке груза, а беспилотный летательный аппарат используют что бы забрать груз с хранилища.
При любом исполнении идентификацию получателя груза могут производить с помощью мобильных устройств пользователя связанных программно с системой управления хранилища или по средствам сканирования биометрических данных, либо ввода символов в соответствующем устройстве которым укомплектована система управления хранилища. В качестве механизмов перемещения могут использовать т толкатели и конвейеры, либо роботов. Хранилище грузов может иметь область приема и передачи груза которое выполняет функции курьерской и пользовательской области одновременно.
Способ доставки грузов представляет собой способ в котором отправляемый груз принимают в пользовательской области и получают информацию об идентификаторах связанных с получателем груза с помощью системы управления хранилища имеющей возможность ввода данных, далее с помощью системы управления хранилища и механизмов перемещения, перемещают груз в ячейку внутри хранилища, далее с помощью системы управления хранилища передают информацию о грузе и связанных с ним идентификаторах системе управления доставкой с помощью которой назначают конкретный беспилотный летательный аппарат, либо автономно действующему беспилотному летательному аппарату, после этого с помощью навигационной системы перемещают беспилотный летательный аппарат до хранилища в котором находится груз, далее с помощью беспилотного летательного аппарата идентифицируют хранилище с помощью идентификаторов и определяют курьерскую область, далее с помощью системы управления хранилища и механизмов перемещения, перемещают груз с ячейки хранилища в курьерскую область, откуда с помощью беспилотного летательного аппарата забирают груз, далее с помощью беспилотного летательного аппарата, навигационной системы и системы управления доставкой, либо с помощью беспилотного летательного аппарата действующего автономно и навигационной системы, доставляют груз в курьерскую область хранилища, с которым связан получатель груза, идентифицируя хранилище, после чего с помощью системы управления доставкой либо автономно действующего беспилотного летательного аппарата передают системе управления хранилищем информацию, связанную с идентификаторами получателя груза, далее с помощью системы управления хранилищем и механизмов перемещения, перемещают груз в ячейку внутри хранилища, после этого ожидают прибытия получателя груза к хранилищу и его авторизации в системе управления хранилища, после авторизации, с помощью системы управления хранилища и механизмов перемещения, перемещают груз с ячейки внутри хранилища в пользовательскую область откуда получатель груза забирает свой груз. Для доставки на большие расстояния могут использовать промежуточные хранилища, что бы беспилотные летательные аппараты могли доставлять груз с перерывом или для смены беспилотного летательного аппарата осуществляющего доставку, либо могут использовать центральные хранилища выполняющие роль логистического центра в которые доставку производят с помощью самолетов, поездов либо морскими путями, причем такой транспорт используют беспилотный, либо с использованием человеческого контроля, а с центральных хранилищ по отдельным хранилищам доставку производят беспилотные летательные аппараты. В качестве механизмов перемещения могут использовать толкатели и конвейеры, либо роботов.
Устройство приема и выдачи груза состоящее из механизма принимающего и перемещающего груз, представляющего собой столб, имеющий сквозное отверстие вдоль и расположенный вертикально, либо под углом вверх, либо горизонтально, относительно горизонта, причем в нижней части столба имеется дверца выдачи груза, на вершине вышеупомянутого столба расположена область доставки, а внутри вдоль столба перемещается с возможностью фиксации горизонтальная стенка на которой располагается груз при доставке и выдаче, образующая на вершине столба горизонтальную поверхность области доставки, а в нижней части столба горизонтальную поверхность области выдачи груза и перемещающая груз в хранилище, представляющее собой множество ячеек для хранения грузов которые статичны, либо меняют свои размеры механически перемещая стенки в зависимости от габаритов груза, а так же механизмы распределения грузов по ячейкам, так же имеется устройство управления имеющее экран, и/или сканер, и/или кнопки для ввода символов для идентификации грузополучателей и грузоотправителей. Устройство может иметь купюроприемник, антивандальную защиту, при этом высота столба зависит от высоты полета беспилотного летательного аппарата, а горизонтальная стенка перемещается вдоль столба по принципу лифта. Так же устройство приема и выдачи груза может иметь солнечные панели и устройства зарядки либо автоматической смены аккумуляторов для беспилотного летательного аппарата.
Краткое описание фигур и чертежей
Заявленное изобретение поясняется графически, где:
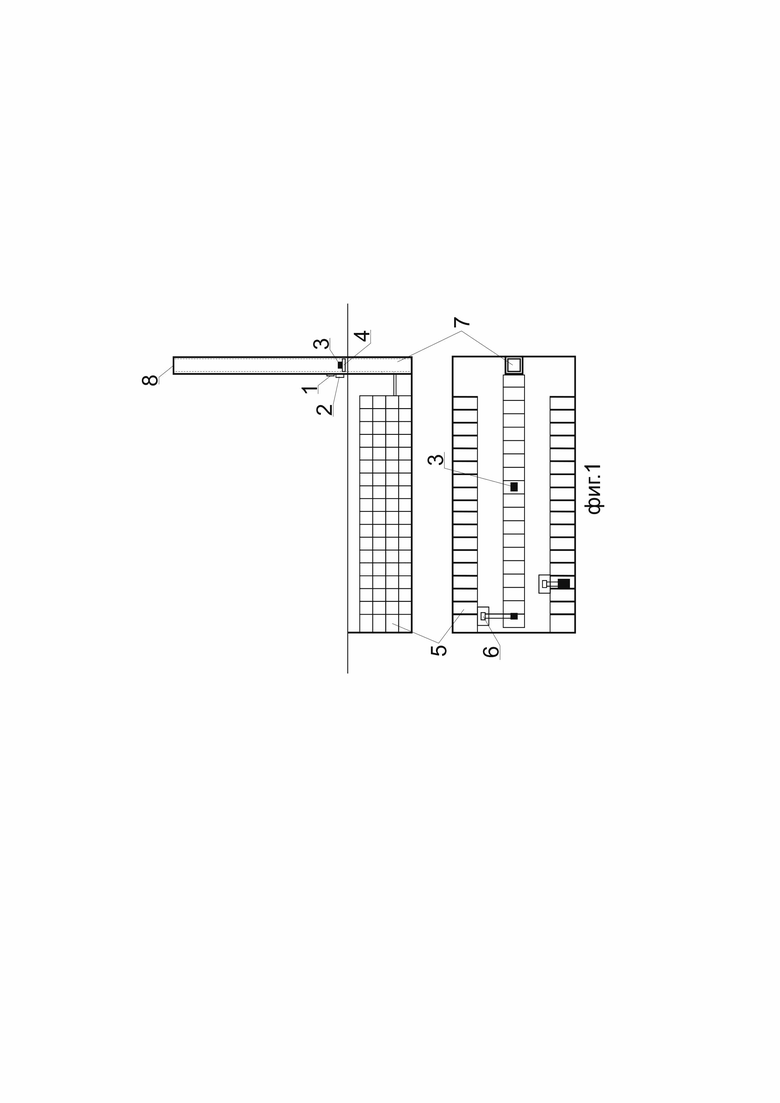
на фиг. 1 изображено – устройство приёма и выдачи груза.
1 - устройство ввода символов системы управления хранилища;
2 – дверь в пользовательсукую область;
3 – перемещаемый груз;
4 – перемещаемая горизонтальная стенка;
5 – ячейки хранилища;
6 – робот, перемещающий грузы в ячейки;
7 – столб, имеющий сквозное отверстие вдоль;
8 – курьерская область.
Пример конкретного применения изобретения
Заявляемый способ доставки грузов состоит в следующем. Для реализации способа создают хранилище грузов для хранения грузов множества пользователей. Хранилище может быть выполнено в виде пространства разделенного ячейками в котором за каждой ячейкой временно закрепляется груз отдельно взятого пользователя. Одна и та же ячейка в разные моменты времени может вмещать груз разных пользователей. Так же создают систему управления хранилища которая фиксирует в каких ячейках находится груз каждого пользователя в определенный момент времени. Для экономии пространства ячейки выполнены разных размеров и форм что бы хранилище могло вмещать грузы различных форм и габаритов. Тоесть в хранилище может быть несколько ячеек для крупногабаритных грузов а остальные для мелких грузов, таким образом в ячейках для крупногабаритных грузов в каждый отдельным момент времени будет храниться груз тех пользователей еще не получивших свой груз, чьи грузы крупногабаритные. Таким образом нет необходимости занимать большое пространство всем ячейкам, так как все ячейки предполагают общее пользование например для всех пользователей подъезда, дома, или нескольких домов. Хранилище может быть выполнено с возможностью изменения размеров ячеек, например если ячейки формируются с помощью вертикально перемещающихся полок с возможностью фиксации на любой высоте в пределах перемещения. Кроме ячеек хранилище имеет автоматические механизмы перемещения грузов контролируемые системой управления. Это могут быть например конвейеры и механизмы выталкивающие груз из ячеек, курьерской и пользовательской областей на конвейеры.
Так же хранилище может вообще не иметь ячеек и представлять собой пространство в которое помещают множество грузов и механизмы идентификации грузов или грузополучателей. В этом случае грузы должны быть маркированы либо помечены например датчиками, а механизмом обеспечивающим перемещение грузов внутри хранилища вплоть до пользовательской области где происходит выдача груза может служить например робот способный идентифицировать и перемещать грузы, получающий команды от системы управления хранилища.
В качестве механизмов перемещения могут использовать конвейеры и толкатели.
Система управления хранилища представляет собой компьютер управляющий всеми процессами перемещения грузов, идентификации грузов и пользователей. Она может иметь экран для ввода символов идентифицирующих пользователей такие как учетные данные, либо сканеры биометрических данных, либо система управления хранилища может быть программно связана с мобильными устройствами пользователей с помощью которых происходит идентификация пользователей. Так же может иметься купюроприемник для оплаты услуг доставки.
Система управления хранилища может быть так же программно связанна с системой управления доставкой беспилотным летательным аппаратом для получения или обмена информации о грузополучателях и грузах.
Так же возле хранилища создают курьерскую область – место куда помещает груз беспилотный летательный аппарат, и пользовательскую область – место откуда пользователь забирает свой груз. Они могут быть выполнены в виде механизмов осуществляющих перемещение груза внутрь хранилища и обратно. При этом курьерская область имеет идентификатор хранилища для ориентации беспилотного летательного аппарата. Так же курьерская и пользовательская области могут быть единой областью что бы не занимать лишнего пространства.
Само хранилище может располагаться как внутри многоквартирного дома, так и за его пределами, например во дворе под землей. В случае расположения хранилища внутри многоквартирного дома курьерскую область и идентификатор хранилища могут располагать на фасаде здания. В случае с расположением хранилища под землей или на территории двора, область доставки может быть расположена над хранилищем или на определенном удалении от хранилища на определенной высоте. В этом случае используется столб на вершине которого располагают курьерскую область и внутри которого перемещается груз до хранилища.
В общем упрощенном виде способ доставки и как часть этого процесса способы приема и выдачи груза могут выглядеть так:
Пользователь желающий отправить груз помещает его в пользовательскую область или перемещает внутрь хранилища в свободную ячейку если хранилище имеет ячейки и вводит с помощью устройства ввода, например экрана информацию об идентификаторах связанных с получателем груза, такую как ФИО получателя, адрес получателя, идентификатор ближайшего к получателю груза хранилища, при необходимости номер ячейки в которой оставил груз и т. д. далее если груз был оставлен в пользовательской области, система управления хранилища определяет в какую ячейку поместить груз в зависимости от габаритов груза или формирует размер ячейки под габариты груза, запоминая номер ячейки и получателя груза. Груз перемещается в определенную ячейку внутри хранилища с помощью механизмов перемещения и храниться там. Система управления хранилища передает всю информацию о грузе и необходимости отправки груза с помощью любой доступной связи системе управления доставкой, которая в свою очередь определяет беспилотный летательный аппарат для осуществления доставки и с помощью навигационной системы перемещает беспилотный летательный аппарат к хранилищу где находится груз. Беспилотный летательный аппарат идентифицирует хранилище при помощи идентификаторов расположенных около хранилища и определяет курьерскую область. Система управления доставки или беспилотный летательный аппарат любыми протоколами связи, например с помощью интернета или связи ближнего радиуса действия, передает информацию системе управления хранилища о том что груз можно передать на транспортировку. Система управления хранилища с помощью механизмов перемещения, перемещает груз с ячейки внутри хранилища в курьерскую область, где груз забирает беспилотный летательный аппарат и при помощи системы управления доставки и навигационной системы отправляется к хранилищу расположенному вблизи получателя груза например по месту жительства. Беспилотный летательный аппарат идентифицирует хранилище куда необходимо доставить груз и определяет курьерскую область оставляя груз в курьерской области. Далее система управления доставкой или беспилотный летательный аппарат передает информацию связанную с грузом системе управления хранилища в которое доставлен груз. После этого с помощью системы управления хранилищем и механизмов перемещения, груз перемещается в ячейку которую определила система управления хранилища, расположенную внутри хранилища. Система управления хранилища или систему управления доставкой может уведомлять грузополучателя о том что груз доставлен в хранилище, например по средствам смс или иных способов уведомления. После того как грузополучатель приходит к хранилищу и идентифицирует себя например при помощи учетных данных, мобильного телефона, биометрических данных или иными способами, система управления хранилищем по средствам механизмов перемещения, перемещает груз из ячейки внутри хранилища в пользовательскую область откуда грузополучатель забирает свой груз.
Способ может предполагать отсутствие курьерской области. В этом случае беспилотный летательный аппарат сам перемещает груз внутрь хранилища или забирает груз с хранилища если необходимо забрать груз для доставки в другое хранилище. При этом если у хранилища есть ячейки, то беспилотный летательный аппарат обменивается информацией об идентификаторе ячейки в которую помещает груз с системой управления хранилища либо если системы управления хранилища нет, то автоматически определяет ячейку. Причем конкретную ячейку может назначать как система управления хранилища так и беспилотный летательный аппарат.
Для перемещения грузов на большие расстояния например между городами или странами могут использовать поезда самолеты и иной транспорт причем этот транспорт так же может быть беспилотным. Груз доставляют в центральное хранилище в которое приходят грузы с других городов и стран. Такое хранилище выполняет роль логистического центра. А уже с центрального хранилища описанным выше способом могут перемещать на расстояния на которые способен перемещать беспилотный летательный аппарат в конкретные хранилища.
Так же возможен способ при котором используют промежуточные хранилища. В этом случае до того момента пока груз будет доставлен в нужное хранилище его могут перемещать в другие хранилища для замены беспилотного летательного аппарата у которого например кончается заряд аккумулятора или иные неполадки.
Предполагается так же возможность осуществления доставки без системы управления доставкой, тоесть децентрализованную, в котором каждый беспилотный летательный аппарат действует автономно имеет встроенную память, свою собственную систему управления и взаимодействует с системами управления хранилищами получая и передавая информацию необходимую для доставки и выдачи груза такую как идентификаторы груза, грузополучателя, хранилища связанного с грузополучателем и т д. То есть хранилища грузов при необходимости доставки груза, определяют ближайший автономно действующий беспилотный летательный аппарат и передают вышеупомянутую информацию. Таким образом система децентрализована так как задания на доставку беспилотные летательные аппараты получают от множества хранилищ, а сам полет и маршрут беспилотные летательные аппараты прокладывают сами зная идентификаторы.
Идентификатор на хранилище может быть выполнен например в виде таблички с номером хранилища, который беспилотный летательный аппарат сможет распознать визуально с помощью видеокамеры. Так же идентификатор может быть выполнен в виде датчика, сигналы которого способны уловить устройства установленные на беспилотных летательных аппаратах, либо являющиеся их составной частью, причем вышеупомянутые устройства могут запрашивать сигнал у датчика находящегося в режиме ожидания. Идентификатор может быть закреплен и виртуально. Для этих целей например в качестве вышеупомянутой информации касающейся создаваемого идентификатора сохраняют в базе данных изображение многоквартирного дома и его координаты в навигационной системе и с помощью дополненной реальности виртуально накладывают идентификаторы на изображение хранилища. Либо идентификатор представляет собой метод идентификации в котором с помощью навигационной системы определяют возле какого хранилища находится беспилотный летательный аппарат, а курьерская область для посадки беспилотного летательного аппарата может, например распознаваться отдельно для координации движений беспилотного летательного аппарата.
Идентификатор может быть распознан беспилотным летательным аппаратом методом сравнения информации находящейся в базе данных и информации получаемой от идентификатора. Например если идентификатором является табличка с символами, то изображение получаемое с помощью камеры установленной на БЛА сравнивается с картинкой заложенной в базу данных и при совпадении символов происходит распознавание адресата. Если идентификатор выполнен в виде датчика, то сравнивают сигнал от идентификатора с сигналом заложенным в базе данных и т. д.
Курьерская область представляет собой механизм с которым беспилотный летательный аппарат способен вступить в контакт. Она может быть выполнена например в виде перемещающейся внутрь хранилища полки, которая перемещается по принципу работы лифта, причем благодаря идентификатору курьерскую область способен распознать беспилотный летательный аппарат. Например может быть какой то стандарт расположения курьерской области относительно идентификатора, или курьерская область может быть выделена особым символом или рамкой для распознавания ее границ.
Так же курьерская область может располагаться внутри хранилища куда влетает беспилотный летательный аппарат, например по средствам вертикально расположенного столба, или дверцы в хранилище
Хранилище может не иметь курьерской области вообще. В этом случае беспилотный летательный аппарат перемещает грузы прямо в ячейки хранилища или оставляет грузы внутри хранилища в котором нет ячеек с помощью механизмов перемещения которыми укомплектован беспилотный летательный аппарат.
Хранилище так же может не иметь пользовательской области. В этом случае ячейки хранилища могут блокироваться с помощью системы управления замочными механизмами, а разблокировка ячеек происходит после идентификации получателя груза.
В процессе доставки так же есть возможность отслеживать товар находящийся в пути, например по средствам мобильного приложения.
В минимальном варианте исполнения способа приема а так же доставки груза могут отсутствовать курьерская и пользовательская области и система управления хранилища. В этом случае беспилотный летательный аппарат сам располагает груз внутри хранилища в конкретной ячейке принадлежащей конкретному грузополучателю, а грузополучатель сам забирает груз из ячейки которая может запираться, а может не иметь замочных механизмов.
Способ приема и выдачи груза описан как адаптивный способ подстраивающийся под любые системы доставки беспилотными летательными аппаратами, при этом одно хранилище взаимодействует с беспилотным летательным аппаратом для приема груза, и выдачи груза грузополучателю.
Способ доставки беспилотными летательными аппаратами предполагает конкретную описанную выше систему доставки в которой задействованы по меньшей мере два хранилища.
Для реализации способов можно, но не обязательно использовать устройство приема и выдачи груза. Оно представляет собой например столб имеющий сквозное отверстие вдоль и расположенный вертикально, либо под углом вверх, либо горизонтально, относительно горизонта, причем в нижней части столба имеется дверца выдачи груза, на вершине вышеупомянутого столба расположена область доставки, а внутри вдоль столба перемещается с возможностью фиксации горизонтальная стенка на которой располагается груз при доставке и выдаче, образующая на вершине столба горизонтальную поверхность области доставки, а в нижней части столба горизонтальную поверхность области выдачи груза и перемещающая груз в хранилище, представляющее собой множество ячеек для хранения грузов которые статичны, либо меняют свои размеры механически перемещая стенки в зависимости от габаритов груза, а так же механизмы распределения грузов по ячейкам, так же имеется устройство управления имеющее экран, и/или сканер, и/или кнопки для ввода символов для идентификации грузополучателей и грузоотправителей.
Устройство приема и выдачи груза может иметь купюроприемник, антивандальную защиту, при этом высота столба зависит от высоты полета беспилотного летательного аппарата, а горизонтальная стенка перемещается вдоль столба по принципу лифта, так же могут иметься солнечные панели и устройства зарядки либо автоматической смены аккумуляторов для беспилотного летательного аппарата.
Все описанные примеры являются конкретными вариантами исполнения изобретения и не могут ограничивать изобретение.
Изобретение относится к методам доставки приема и выдачи грузов с помощью беспилотных летательных аппаратов. Способ включает в себя автоматический прием груза у беспилотного летательного аппарата при доставке при помощи механизма, имеющего идентификатор, связанный с хранилищем, и курьерскую область, куда помещает груз беспилотный летательный аппарат, также получение информации об идентификаторе получателя груза при помощи системы управления хранилища по средствам связи от беспилотного летательного аппарата либо системы управления доставкой, либо груз сам содержит идентификатор для дальнейшего распознавания получателя, и перемещение груза с курьерской области в хранилище грузов с помощью механизма перемещения и системы управления хранилища. В результате достигается уменьшение площади, необходимой для осуществления приема и выдачи груза при доставке беспилотными летательными аппаратами жителям многоквартирных домов, прием и выдача груза без вмешательства в конструкцию здания, полная автоматизация процесса доставки, замена отделений почты на автоматизированные хранилища. 7 з.п. ф-лы, 1 ил.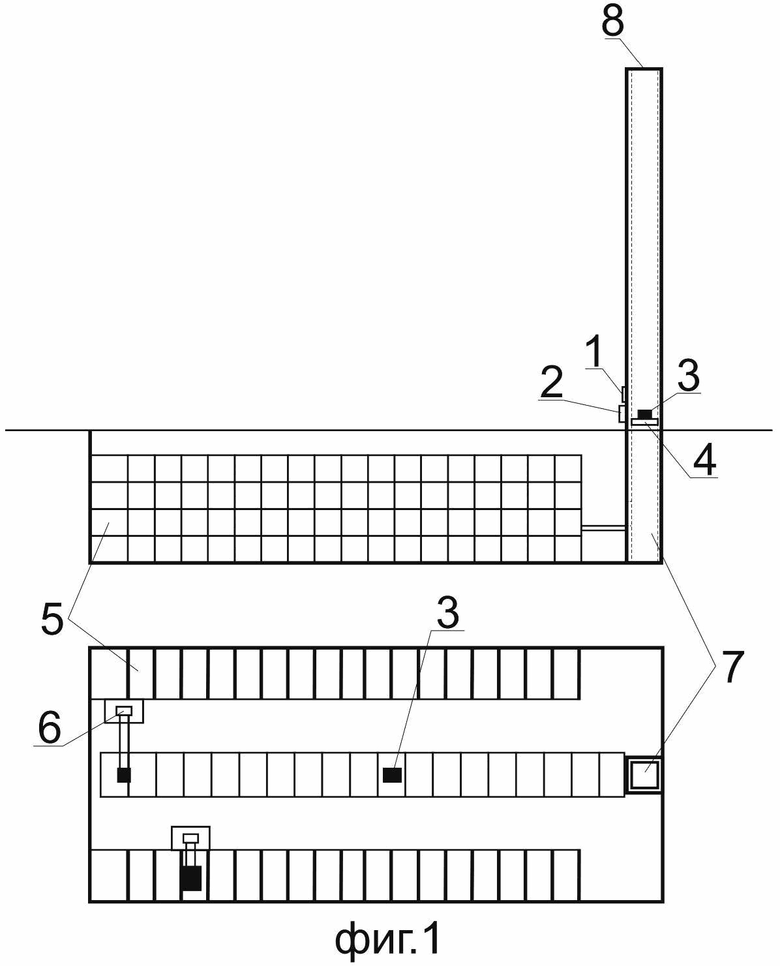
1. Способ доставки грузов, в котором получают информацию об идентификаторах, связанных с получателем груза, с помощью системы управления хранилища, имеющей возможность ввода данных,
отправляемый груз принимают в ячейке хранилища, либо
отправляемый груз принимают в ячейке хранилища и блокируют ячейку замочным механизмом, либо
отправляемый груз принимают в пользовательской области, а с помощью системы управления хранилища и механизмов перемещения перемещают груз в хранилище,
далее с помощью системы управления хранилища передают информацию о грузе и связанных с ним идентификаторах системе управления доставкой, с помощью которой назначают конкретный беспилотный летательный аппарат либо автономно действующий беспилотный летательный аппарат,
после назначения беспилотного летательного аппарата с помощью навигационной системы перемещают беспилотный летательный аппарат до хранилища, в котором находится груз, с помощью беспилотного летательного аппарата идентифицируют хранилище с помощью идентификаторов, а также определяют курьерскую область, с помощью системы управления хранилища и механизмов перемещения перемещают груз с ячейки хранилища в курьерскую область, откуда с помощью беспилотного летательного аппарата забирают груз, либо
после назначения беспилотного летательного аппарата беспилотный летательный аппарат используют, чтобы забрать груз из хранилища,
далее с помощью беспилотного летательного аппарата, навигационной системы и системы управления доставкой либо с помощью беспилотного летательного аппарата, действующего автономно, и навигационной системы доставляют груз внутрь хранилища, имеющего идентификатор, и получают информацию об идентификаторе получателя груза при помощи системы управления хранилища посредством связи от беспилотного летательного аппарата либо системы управления доставкой, либо груз сам содержит идентификатор для дальнейшего распознавания получателя, либо
доставляют груз в курьерскую область хранилища, с которым связан получатель груза, идентифицируя хранилище, а с помощью системы управления доставкой либо автономно действующего беспилотного летательного аппарата передают системе управления хранилищем информацию, связанную с идентификаторами получателя груза, либо груз сам содержит идентификатор для дальнейшего распознавания получателя, а с помощью системы управления хранилищем и механизмов перемещения перемещают груз в хранилище,
после этого ожидают прибытия получателя груза к хранилищу и
получатель груза самостоятельно забирает свой груз из ячейки, либо
получатель груза проходит авторизацию в системе управления хранилища и с помощью системы управления хранилища разблокируют запертую ячейку хранилища, в которой хранится груз, и дают возможность получателю груза забрать груз из хранилища самостоятельно, либо
получатель груза проходит авторизацию в системе управления хранилища и с помощью системы управления хранилища и механизмов перемещения перемещают груз из хранилища в пользовательскую область, откуда получатель груза забирает свой груз.
2. Способ доставки грузов по п. 1, отличающийся тем, что идентификатор, связанный с хранилищем, представляет собой табличку с символами или датчики, распознаваемые беспилотными летательными аппаратами, либо метод идентификации посредством навигационных систем, а курьерская область выполнена в виде механизма, имеющего вид полки, перемещающей внутрь хранилища груз по принципу лифта.
3. Способ доставки грузов по п. 1, отличающийся тем, что идентификацию получателя груза производят с помощью мобильных устройств пользователя, связанных программно с системой управления хранилища, либо посредством сканирования биометрических данных либо ввода символов в соответствующем устройстве, которым укомплектована система управления хранилища.
4. Способ доставки грузов по п. 1, отличающийся тем, что пользователя информируют о доставке груза в хранилище и дают возможность отслеживания груза.
5. Способ доставки грузов по п.1, отличающийся тем, что в качестве механизмов перемещения используют толкатели и конвейеры либо роботов.
6. Способ доставки грузов по п. 1, отличающийся тем, что курьерская и пользовательская области выполнены в виде единой области приема и передачи груза.
7. Способ доставки грузов по п. 1, отличающийся тем, что для доставки на большие расстояния используют промежуточные хранилища, чтобы беспилотные летательные аппараты могли доставлять груз с перерывом или для смены беспилотного летательного аппарата, осуществляющего доставку.
8. Способ доставки грузов по п. 1, отличающийся тем, что для доставки на большие расстояния используют центральные хранилища, выполняющие роль логистического центра, в которые доставку производят с помощью самолетов, поездов либо морскими путями, причем такой транспорт используют беспилотный либо с использованием человеческого контроля, а с центральных хранилищ по отдельным хранилищам доставку производят беспилотные летательные аппараты.
| Токарный резец | 1924 |
|
SU2016A1 |
| Способ выполнения работ, связанных с доставкой | 2016 |
|
RU2651782C1 |
| Способ получения цианистых соединений | 1924 |
|
SU2018A1 |
| Токарный резец | 1924 |
|
SU2016A1 |
| Автомобиль-сани, движущиеся на полозьях посредством устанавливающихся по высоте колес с шинами | 1924 |
|
SU2017A1 |
| Способ защиты переносных электрических установок от опасностей, связанных с заземлением одной из фаз | 1924 |
|
SU2014A1 |
| Способ распределения заказов | 2016 |
|
RU2642371C1 |

