Изобретение относится к медицине, а именно к роботизированной медицинской технике, и может быть использовано в стоматологии и челюстно-лицевой хирургии с возможностью выполнения тренажерной функции при обучении роботизированной хирургии врачей на этапе постдипломного образования.
Хирургическое применение лазеров основано на прямом механическом воздействии высокоинтенсивного излучения, которое позволяет резать ткани. Принцип действия лазерного луча основан на том, что энергия сфокусированного светового пучка резко повышает температуру в облучаемом месте и вызывает коагуляцию (свертывание) биологических тканей. Особенности действия лазерного излучения зависят от типа лазера, режима проведения разреза и характера облучаемой ткани.
Выбор этих параметров вручную крайне сложная задача, так как количество факторов, влияющих на результат слишком велико. Дополнительным ограничением является тот факт, что при выборе режима также желательно учитывать возможности исполнительного механизма-манипулятора в составе мультифункционального хирургического комплекса по части отработки заданной траектории разреза биологической ткани. Также стоит учитывать, что определенная ширина и глубина разреза может быть достигнута различными комбинациями параметров режима проведения разреза, и выбор оптимального из них - нетривиальная задача.
Известен лазерный импульсный модуль для комплексной терапии, гипертермии и хирургии заболеваний челюстно-лицевой области (РФ №2635773), содержащий корпус, в котором находятся блок питания, соединенный с панелью управления с цифровым жидкокристаллическим экраном, оптические излучатели, съюстированные с выводными световодами моноволоконных излучателей, насадки, сумматор-коллектор, соединяющий выводные световоды с выходным световодом, к которому подключаются насадки, а также лазерные драйверы источников оптического излучения, регулирующие фронты импульсов от низкочастотного до высокочастотного оптического излучения, источники оптического излучения генерируют импульсы волн в диапазонах 1262-1272 нм и 756-764 нм, соответствующих локальному пику поглощения кислорода в тканях. Кроме того, оптические излучатели выполнены в виде нескольких секций. Лазерный импульсный модуль встраивается в хирургическую робототехническую установку.
Известна лазерная роботизированная медицинская установка (РФ ИМ №172817), выбранная в качестве прототипа, содержащая блок питания, связанный с ним микропроцессорный блок управления, соединенный с оптическим блоком, включающим полупроводниковые лазерные источники, световоды и оптический узел юстировки, адаптер для подключения сменного волоконно-оптического инструмента. Установка дополнительно снабжена шарнирным манипулятором, управляемым контроллером, и соединенным с помощью фланца с адаптером, в корпусе которого размещены световоды, соединенные в пучок и зафиксированные прижимными винтами, сменный волоконно-оптический инструмент, а на наружной поверхности корпуса закреплена магнитная база для установки координатно-измерительного отражателя. Известная лазерная медицинская установка позволяет осуществлять хирургическое вмешательство с использованием манипулятора, частично выполняющего функции хирурга и выполнять тренажерную функцию, позволяющую определять положение медицинского инструмента при его мануальном перемещении хирургом для последующего анализа за счет использования отражателя координатно-измерительной машины, установленного на корпусе адаптера.
Технические возможности известных роботизированных комплексов недостаточны при использовании лазерных установок.
Задачей предлагаемого технического решения является создание роботизированного мультифункционального лазерного хирургического комплекса для широкого спектра операций, используемых в стоматологии и челюстно-лицевой хирургии, с возможностью автоматического выбора режима проведения разреза врачом, принимающим решения в сложных условиях для полного и объективного анализа предметной деятельности.
Техническим результатом является создание траектории движения рабочего инструмента (сменный волоконный оптический инструмент лазерного модуля), закрепленного на манипуляторе, а также определение режимов ширины и глубины проведения разреза биологической ткани.
Технический результат достигается за счет использования роботизированного мультифункционального лазерного хирургического комплекса для челюстно-лицевой хирургии, содержащего блок питания, микропроцессорный блок управления, соединенный импульсным хирургическим лазером со сменным волоконно-оптическим инструментом и снабженного манипулятором, соединенным с рабочим местом врача, оборудованным графическим интерфейсом. Дополнительно комплекс снабжен системой выбора режимов работы комплекса, состоящей из программного модуля формирования траектории, соединенного с программным модулем выбора режимов, который в свою очередь соединен с базой знаний, и программного модуля предварительной симуляции, сигнал с которого идет на интерфейс для принятия окончательного решения.
Кроме того, программный модуль формирования траектории получает для любого заданного момента времени в разрешенном диапазоне числовое значение координат положения и ориентации сменного волоконно-оптического инструмента на основе данных об обрабатываемом объекте.
Кроме того, программный модуль выбора режимов осуществляет выбор на основе всего спектра данных, имеющихся в базе знаний желаемых параметров разреза, требуемых для проведения операции.
Кроме того, программный модуль предварительной симуляции моделирует выполнение траектории разреза с учетом трехмерной модели обрабатываемого объекта и информации из базы данных.
Техническая сущность предлагаемого технического решения заключается в следующем.
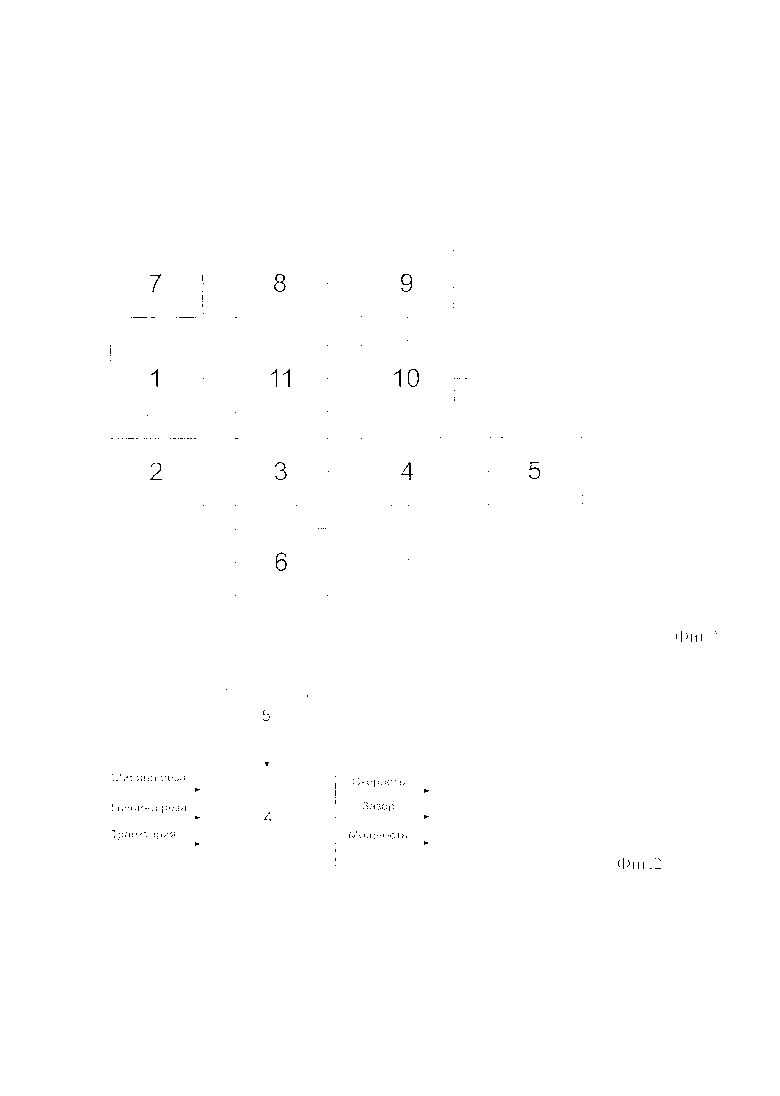
Структура системы по выбору режимов работы мультифункционального лазерного хирургического комплекса (МЛХК) представлена на фигуре 1, где 1 - рабочее место врача, принимающего решение, 2 - графический интерфейс, 3 - программный модуль формирования траекторий, 4 - программный модуль выбора режимов, 5 - база знаний, 6 - программный модуль предварительной симуляции.
Мультифункциональный лазерный хирургический комплекс включает 7 - блок питания, 8 - микропроцессорный блок управления, 9 - импульсный хирургический лазер, 10 - сменный волоконно-оптический инструмент (рабочий инструмент), 11 - носитель сменного инструмента.
Рабочее место врача, принимающего решение (1), оснащено группой персональных компьютеров с набором необходимого программного обеспечения для работы с роботизированным мультифункциональным хирургическим комплексом.
Врач-хирург, принимающий решение, через графический интерфейс (2), используя программный модуль формирования траекторий (3), задает необходимую траекторию движения инструмента. Исходными данными (помимо самой траектории), которые может задать врач, являются необходимая ширина и глубина проведения разреза на разных участках траектории, что обуславливает автоматический выбор параметров лазерного излучения лазерного модуля. После предварительной обработки в программный модуль формирования траекторий (3), данные поступают в программный модуль выбора режимов (4), который, используя данные из базы знаний (5), формирует комбинацию параметров режима проведения разреза, при которых достигается требуемая ширина и глубина разреза, другими словами - рекомендованный режим разреза для каждой точки траектории за счет расчета и установки оптимальных параметров лазерного излучения, прежде всего, мощности и частоты импульсов излучения в автоматическом режиме.
Эти данные, из программного модуля выбора режимов (4) поступают в программный модуль предварительной симуляции (6), где врач-хирург, используя графический интерфейс (2), может проанализировать рекомендованные системой по выбору режимов работы роботизированного мультифункционального лазерного хирургического комплекса путем просмотра симуляций операции, и в случае одобрения, верифицировать рекомендованные режимы параметров проведения разреза.
База знаний (5) содержит в себе экспериментальные данные по работе мультифункционального лазерного хирургического комплекса, данные об исполнительном механизме - носителя сменного инструмента (11), включая его программные и механические ограничения, а также набор необходимых медицинских знаний для предотвращения травм при проведении операции.
Программный модуль выбора режимов (4) позволяет автоматически задавать расстояние до обрабатываемой поверхности, скорость движения рабочего инструмента (сменного волоконного оптического инструмента лазерного модуля) (10) носителя сменного инструмента (11) и мощность лазера (9) на различных участках траектории, в зависимости от выбранной врачом ширины и глубины проведения разреза, учитывая параметры заданной траектории движения рабочего инструмента (ТО).
Так как определенная ширина и глубина разреза тканей может быть достигнута различными комбинациями параметров режима разреза (мощностью лазерного излучения, расстоянием лазерного рабочего органа от тканей, скоростью перемещения инструмента и т.д.), система должна осуществлять выбор на основе всего спектра данных, имеющихся в базе знаний (5).
На фиг. 2 показана структура программного модуля выбора режимов (4) проведения разреза с его входными и выходными параметрами. Так как определенная ширина и глубина разреза может быть достигнута различными комбинациями параметров режима разреза (скорость, зазор, мощность), программный модуль должен осуществлять выбор на основе всего спектра данных, имеющегося в базе знаний системы. Количество этих комбинаций может быть также ограничено дополнительными условиями, включенными в запрос на формирование рекомендации. Такими условиями может являться, например, требование осуществить разрез с максимально возможной скоростью, учитывая параметры манипулятора (11) и заданной траектории движения. Также возможна фиксация одного из выходных параметров режима работы, к примеру, мощности лазерного излучения, и, соответственно, выдача рекомендаций по оставшимся неопределенным параметрам - зазору и скорости.
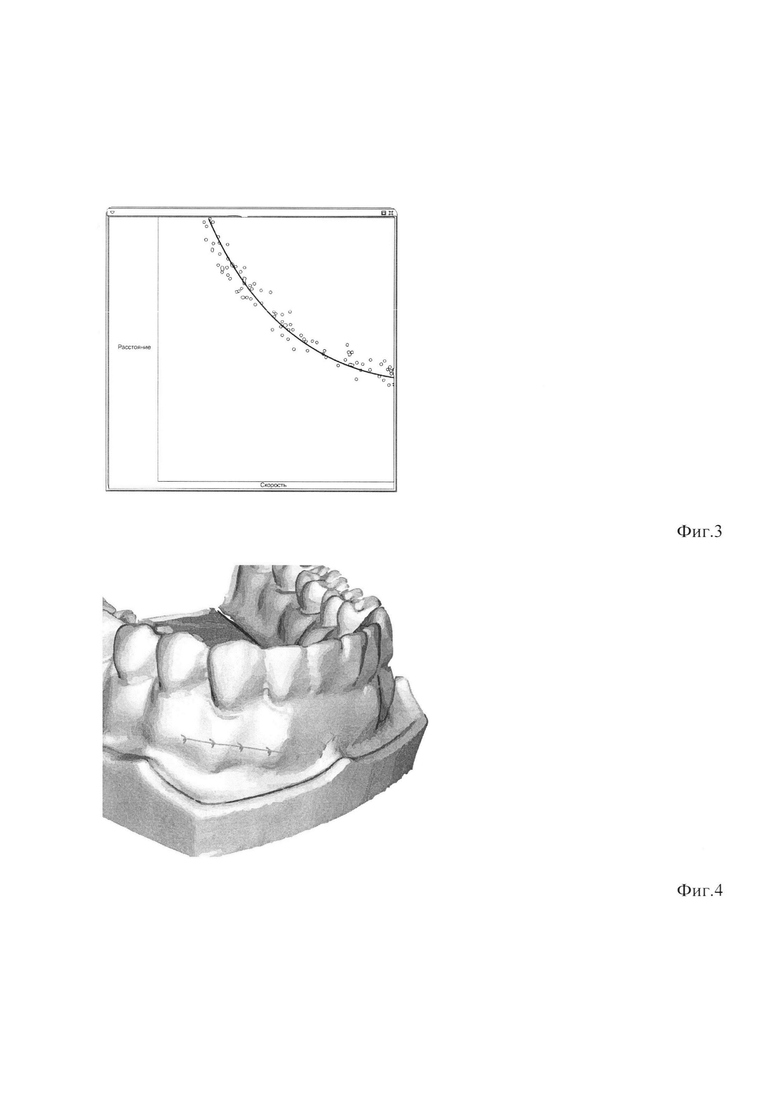
Информация о найденных режимах выводится на экран интерфейса (2) в графической форме для определения эмпирической зависимости свободных параметров поиска для заданной ширины разреза представлена на фиг. 3.
В зависимости от заданного свободного параметра программный модуль предоставляет различные зависимости соответствующих свободных параметров. Графическое представление не только показывает зависимость между свободными параметрами, но и опыт врача о соответствии влияния подобранных параметров на режим проведения разреза тканей.
Для выполнения роботизированным мультифункциональным лазерным хирургическим комплексом операций в лазерной челюстно-лицевой хирургии, необходимо, чтобы программа комплекса давала возможность врачу задавать требуемые геометрические параметры проведения разреза. Этими геометрическими параметрами является необходимая ширина и глубина разреза на разных участках траектории. Они, в свою очередь, зависят от следующих параметров:
1. Воздушный зазор между наконечником рабочего инструмента (10) и слизистой оболочкой или искусственной десной (в эксперименте).
2. Скорость движения лазерного наконечника рабочего инструмента по слизистой оболочке или искусственной десне (в эксперименте).
3. Мощность лазерного излучения рабочего инструмента (10).
Совокупность зависимостей всех этих параметров называется режимом проведения разреза. Так как определенная ширина и глубина разреза может быть достигнута при различных режимах проведения разреза, выбор этих параметров вручную - крайне сложная задача.
Программный модуль формирования траектории (3) предоставляет врачу возможность задавать траекторию движения, исполняемую инструментом (10), закрепленным на носителе сменного инструмента (11), а также требования к этой траектории.
Траектория рабочего инструмента (10) может быть задана различными способами, в том числе по ключевым точкам. Задание траектории системой уравнений позволяет для любого заданного момента времени в разрешенном диапазоне получить числовое значение координат положения и ориентации рабочего инструмента. Задание ориентации рабочего инструмента производится на основе данных об обрабатываемом объекте, с тем, чтобы кончик рабочего инструмента (10) всегда был параллелен нормали к поверхности.
Проведение операций с помощью роботизированного мультифункционального лазерного хирургического комплекса требует возможности описать проведение операции в виде набора движений по заданным траекториям, для обеспечения выполнения операции с помощью носителя сменного инструмента (11).
Программный модуль формирования траектории (3) позволяет загрузить индивидуальную модель обрабатываемой зоны для планирования и симуляции операции и создавать траекторию на основе ключевых точек, врачом, принимающим решение. Ключевые точки создаются в соответствии с индивидуальной моделью обрабатываемой зоны (фиг. 4).
Программный модуль предварительной симуляции (6) выполняет следующие операции.
Перед выполнением операции необходимо удостовериться в правильности заданной траектории, а также верифицировать рекомендованные программным модулем выбора режимом (4) режимы проведения разреза. Для этих целей программное обеспечение обладает возможностью моделировать выполнение траектории в виртуальном пространстве. Моделирование позволяет проанализировать траекторию на такие ошибки как неверное задание положения ключевых точек, неверное задание ориентации рабочего органа в ключевых точках, столкновение рабочего органа с объектами, невозможность исполнения траектории из-за конструктивных особенностей манипулятора-хирурга.
Система позволяет загружать в виртуальное пространство трехмерные модели обрабатываемого объекта, а также рабочего инструмента. Графический интерфейс (2) позволяет проводить демонстрацию движения рабочего инструмента (10) согласно сформированной врачом-хирургом траектории, и рекомендованному программным модулем выбора режимов (4) работы с учетом временного масштаба.
Анализ правильности задания траектории и соответствующих параметров режимов работы роботизированного мультифункционального лазерного хирургического комплекса осуществляется врачом-хирургом визуально, после чего появляется возможность верификации плана движения и передачи данных для формирования программы движения носителя сменного инструмента (11).
Программный модуль предварительной симуляции (6) учитывает характеристики используемого манипулятора, такие как геометрические параметры манипулятора, геометрические параметры инструмента, количество звеньев манипулятора, тип подвижностей манипулятора, физические ограничения подвижностей манипулятора. Симуляция проводится с учетом заданной скорости движения и возможностей манипулятора, таким образом, понижая шанс неправильно спланировать операцию.
Основой базы знаний (5) системы поддержки по выбору режимов работы мультифункционального лазерного хирургического комплекса служат экспериментальные данные об эталонных режимах проведения разреза, то есть количественного значения каждого параметра режима проведения разреза и их зависимости друг от друга. Данные о носителе сменного инструмента получены путем экспериментального исследования траекторий, проводимых им. Его программные и механические ограничения можно получить из информации предоставляемой производителем. Также необходим набор медицинских знаний о предельных значениях лазерного излучения, которые биологическая ткань может выдержать до момента нанесения травмы.
Программный модуль работы с базой знаний (5) содержит в себе базу знаний выбора режимов. База знаний выбора режимов это не только база данных, содержащая в себе эмпирическую информацию о режимах проведения разрезов с использованием лазерного излучения, но и математическо-алгоритмический аппарат для обработки данных, хранящихся в базе данных.
Программный модуль актуализации базы знаний (5) предоставляет возможность производить те или иные изменения в базе знаний через графический интерфейс (2) с различными уровнями доступа.
Актуализация базы знаний (5) производится посредством внесения врачом эмпирических данных и его профессиональной оценки качества операции.
Были проведены экспериментальные исследования для получения количественной оценки сравнения траекторий, проводимых врачом, и траекторий, проводимых манипулятором. Перемещения рабочего инструмента (10) врачом и манипулятором (И) проводились по заранее определенным типовым траекториям, которые и являются объектом сравнения. Типовые траектории задавались в зависимости от выполняемой медицинской операции. В данном случае рассматривались операции челюстно-лицевой хирургии на слизистой оболочке полости рта человека.
В качестве импульсного хирургического лазера (9) использовали диодный лазер с импульсным драйвером накачки с возможностью генерации импульсов с наносекундной частотой излучения. Сменный волоконно-оптический инструмент (10) позволяет совершать разрезы мягких тканей полости рта и кожи челюстно-лицевой области различной глубины и ширины в зависимости от определенных значений мощности лазерного излучения, времени импульса и времени между импульсами. Данные параметры являются режимами проведения разреза с точки зрения врача. При использовании манипулятора для той же операции происходит расширение данных режимов проведения разреза за счет дополнительной возможности контроля следующих параметров: скорости ведения инструмента и величины контроля следующих параметров: скорости ведения инструмента и величины воздушного зазора между наконечником инструмента и биологической тканью. Совокупность данных от типовых траекторий при соблюдении требуемых режимов проведения разреза позволяет сформировать критерии, в соответствии с которыми будет происходить сравнение программных перемещений манипулятора и мануальных перемещений врача.
Экспериментальные исследования траекторий манипулятора и мануальных перемещений врача осуществляли для получения их количественной сравнительной оценки в соответствии со следующими критериями:
1. Стандартное отклонение точек от линейной, полулунной, фестончатой траекторий - величина отклонения в каждой точке от ее проекции на среднюю линию (модель), построенную по методу наименьших квадратов. Данный критерий характеризует качества прохода по запланированной траектории.
2. Погрешность величины воздушного зазора между наконечником инструмента и обрабатываемой биологической тканью. Разница между измеренным значением воздушного зазора и заданным. Данный критерий характеризует стабильность удержания средней величины воздушного зазора между биологической тканью и наконечником рабочего инструмента (10) на всей траектории.
3. Среднее арифметическое относительной погрешности скорости реза и погрешность средней скорости реза на каждом проходе рабочего инструмента (10). Разница между измеренным значением скорости на проходе и заданным характеризует стабильность удерживания величины средней скорости на всей траектории.
4. Стандартное отклонение от средней скорости движения характеризует качество удержания величины текущей скорости реза.
Чтобы провести сравнение траекторий врача и манипулятора, необходимо получить экспериментальные данные об их программных и мануальных перемещениях. Мануальные перемещения проводит врач, программные перемещения совершает носитель сменного инструмента KUKALWR4+ (11). Для записи координат точек на траекториях использовали координатно-измерительную машину - лазерный трекер LTD 800. Запись точек осуществляли путем сканирования положения отражателя, закрепленного на рабочем инструменте (10) с частотой 300 Гц по типовым траекториям. Типовые траектории заданы на основе анализа типовых медицинских операций в области челюстно-лицевой хирургии. Типовые траектории разделены на линейную, полулунную и фестончатую. При проведении экспериментов для сравнения траекторий от перемещений манипулятора и траекторий от мануальных перемещений врача вместо обрабатываемой биологической ткани при оценке мануальных перемещений используется поверхность стола с минимальной плоскостностью, а при оценке перемещений манипулятора поверхность стола задается манипулятору с помощью программы. Это необходимо для того, чтобы исключить из результата оценки погрешности, связанные с трудностями задания траекторий и их сравнением на поверхностях сложной формы у биологической ткани. Также во время проведения эксперимента луч между координатно-измерительной машиной и отражателем не прерывался и при проведении траекторий, как манипулятором, так и врачом сохранялась ориентация рабочего инструмента (10). При сравнении на линейной траектории получилось, что манипулятор точнее врача в 11 раз, на полулунной траектории в 5 раз и на фестончатой в 3 раза.
Была экспериментально установлена погрешность величины воздушного зазора между наконечником рабочего инструмента (10) и обрабатываемой биологической тканью. Также была установлена разница между измеренным значением воздушного зазора и заданным. По результатам оценки, можно утверждать, что по критерию «средняя погрешность величины воздушного зазора» и по дополнительному критерию «величина разброса воздушного зазора», на типовых траекториях манипулятор превышает естественные способности врача в среднем в 7 раз.
В рамках мультифункционального лазерного хирургического комплекса для челюстно-лицевой области реализована система, позволяющие проводить сравнительные исследования работы носителя сменного инструмента и врача-хирурга в области качества проведения манипуляций, в программной части реализована система по выбору режимов работы мультифункционального лазерного хирургического комплекса с набором специализированных программных модулей. Проведены экспериментальные исследования и получена количественная оценка сравнения траекторий, проводимых врачом-хирургом, и траекторий, проводимых носителем сменного инструмента. Сравнение проводилось на базе разработанных критериев качества проведения операций в челюстно-лицевой хирургии.
| название | год | авторы | номер документа |
|---|---|---|---|
| Искусственная десна для имитации воздействия на биологическую ткань лазерного излучения | 2017 |
|
RU2647373C1 |
| Универсальное лазерно-диодное медицинское устройство | 2018 |
|
RU2687568C1 |
| ЭКСПЕРТНАЯ СИСТЕМА НА БАЗЕ МЕДИЦИНСКОГО МАНИПУЛЯЦИОННОГО РОБОТА ДЛЯ ТРАНСПЕДИКУЛЯРНОЙ ФИКСАЦИИ ПОЗВОНОЧНИКА | 2023 |
|
RU2833780C1 |
| Комбинированная интраоперационная навигационная система с использованием генерации ультразвуковых изображений методом трассировки лучей | 2022 |
|
RU2816071C1 |
| Робот-ассистированный комплекс минимально инвазивной абдоминальной хирургии для автоматизированного выполнения операций методами локальной деструкции новообразований печени | 2023 |
|
RU2841089C1 |
| Многофункциональное устройство со сменными хирургическими инструментами для измерения воздействующих на них сил и моментов при проведении нейрохирургических операций | 2019 |
|
RU2736162C2 |
| АССИСТИРУЮЩИЙ ХИРУРГИЧЕСКИЙ КОМПЛЕКС | 2020 |
|
RU2720830C1 |
| СПОСОБ ОЦЕНКИ ЭСТЕТИКИ ЛИЦА НА ЦИФРОВЫХ 3D-МОДЕЛЯХ ГОЛОВЫ | 2023 |
|
RU2826776C1 |
| МНОГОФУНКЦИОНАЛЬНОЕ БЕСПРОВОДНОЕ УСТРОЙСТВО СО СМЕННЫМИ ХИРУРГИЧЕСКИМИ ИНСТРУМЕНТАМИ ДЛЯ ИЗМЕРЕНИЯ ИХ УГЛОВ ОРИЕНТАЦИИ В ПРОСТРАНСТВЕ И ВОЗДЕЙСТВУЮЩИХ НА НИХ СИЛ И МОМЕНТОВ ПРИ ПРОВЕДЕНИИ НЕЙРОХИРУРГИЧЕСКИХ ОПЕРАЦИЙ | 2022 |
|
RU2807937C1 |
| Интерактивный медицинский фантом для отработки навыков проведения функциональных стереотаксических вмешательств | 2022 |
|
RU2790761C1 |
Изобретение относится к медицинской технике и может быть использовано в стоматологии и челюстно-лицевой хирургии с возможностью выполнения тренажерной функции при обучении роботизированной хирургии врачей на этапе постдипломного образования. Мультифункциональный лазерный хирургический комплекс для челюстно-лицевой хирургии содержит блок питания, микропроцессорный блок управления, соединенный импульсным хирургическим лазером, снабженным сменным волоконно-оптическим инструментом, установленным на манипуляторе, управляемом с рабочего места врача, оборудованного графическим интерфейсом и связанного с системой выбора режимов работы комплекса, при этом система выбора режимов работы комплекса состоит из программного модуля формирования траектории, соединенного с программным модулем выбора режимов, подключенного к базе знаний, и соединенного с программным модулем предварительной симуляции, при этом программный модуль формирования траектории выполнен с возможностью получения для заданного момента времени числового значения координат положения и ориентации сменного волоконно-оптического инструмента на основе данных об обрабатываемом объекте, программный модуль выбора режимов выполнен с возможностью выбора на основе данных, имеющихся в базе знаний заданных параметров проведения разреза, требуемых для проведения операции, а программный модуль предварительной симуляции выполнен с возможностью моделирования траектории проведения разреза с учетом трехмерной модели обрабатываемого объекта и информации из базы знаний. Использование изобретения позволяет проводить сравнительные исследования работы манипулятора и врача-хирурга. 4 ил.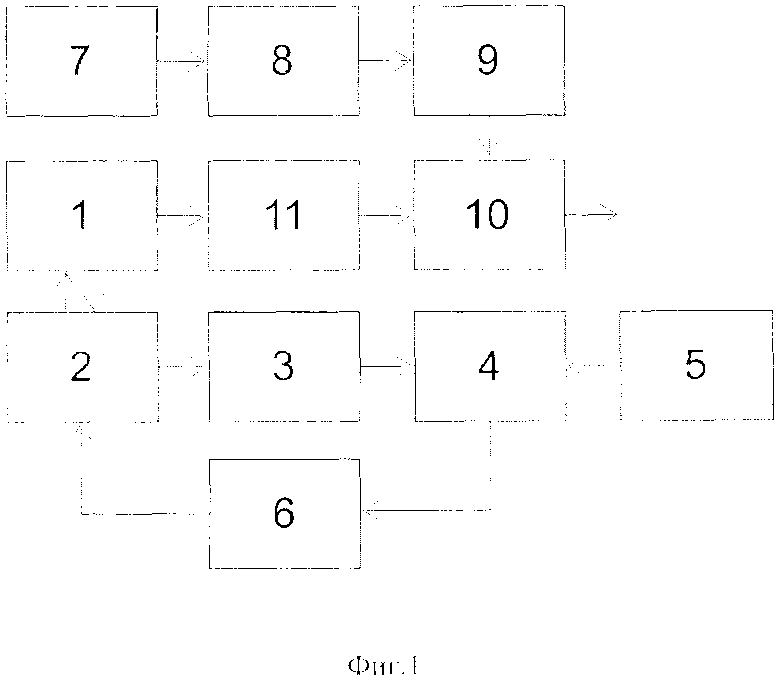
Мультифункциональный лазерный хирургический комплекс для челюстно-лицевой хирургии, содержащий блок питания, микропроцессорный блок управления, соединенный импульсным хирургическим лазером, снабженным сменным волоконно-оптическим инструментом, установленным на манипуляторе, управляемом с рабочего места врача, оборудованного графическим интерфейсом и связанного с системой выбора режимов работы комплекса, отличающийся тем, что система выбора режимов работы комплекса состоит из программного модуля формирования траектории, соединенного с программным модулем выбора режимов, подключенного к базе знаний, и соединенного с программным модулем предварительной симуляции, при этом программный модуль формирования траектории выполнен с возможностью получения для заданного момента времени числового значения координат положения и ориентации сменного волоконно-оптического инструмента на основе данных об обрабатываемом объекте, программный модуль выбора режимов выполнен с возможностью выбора на основе данных, имеющихся в базе знаний заданных параметров проведения разреза, требуемых для проведения операции, а программный модуль предварительной симуляции выполнен с возможностью моделирования траектории проведения разреза с учетом трехмерной модели обрабатываемого объекта и информации из базы знаний.
| СПОСОБ ПОЛУЧЕНИЯ 4-МЕТИЛ-1,2-ДИАМИНОБЕНЗОЛА | 0 |
|
SU172817A1 |
| WO 2017120540 A1, 13.07.2017 | |||
| US 2018021097 A1, 25.01.2018 | |||
| US 2014350337 A1, 27.11.2014 | |||
| US 2016143778 A1, 26.05.2016 | |||
| ЛАЗЕРНЫЙ ИМПУЛЬСНЫЙ МОДУЛЬ ДЛЯ КОМПЛЕКСНОЙ ТЕРАПИИ, ГИПЕРТЕРМИИ И ХИРУРГИИ ЗАБОЛЕВАНИЙ ЧЕЛЮСТНО-ЛИЦЕВОЙ ОБЛАСТИ (ВАРИАНТ) | 2016 |
|
RU2635773C1 |
| KR 101838229 B1, 13.08.2018 | |||
| CN 105030360 A, 11.11.2015. | |||

