Изобретение относится к области медицинской техники, а именно к устройствам и хирургическим инструментам, применяемым в нейрохирургии для работы, связанной с установкой или удалением внутренних фиксирующих устройств, а также для разведения мягких тканей и их удержания для создания операционного поля, обеспечивающего удобство проведения хирургом операции. Например, для выполнения операций транспедикулярной фиксации позвонков используют следующие основные инструменты: шило, сверло, устройства для завинчивания транспедикулярных винтов и гаек. А для обеспечения доступа к мягким тканям используют различные ретракторы, стамески и другие инструменты. Осуществлять манипулирование и навигацию этими инструментами возможно при помощи специализированных робототехнических или мехатронных устройств. При проектировании таких робототехнических и мехатронных устройств в нейрохирургии возникают вопросы, связанные с необходимостью получения оптимальных, удобных многофункциональных конструкций, которые позволяли бы проводить, упрощать и улучшать хирургические манипуляции, а также, за счет этого минимизировать время проведения оперативного вмешательства, облегчая работу хирургов. Многофункциональное устройство со сменными хирургическими инструментами позволяет измерять силы и моменты от взаимодействия с различными тканями пациентов (кости, мясо, кожа и т.д.), получать и обрабатывать значения сил и моментов в реальном времени. Данные значения используют для проектирования оптимальной конструкций робототехнических и мехатронных систем, применяемых в нейрохирургии. Подобный подход позволяет исключить необходимость разработки предварительных неоптимизированных вариантов конструкции робототехнических систем, что повышает скорость разработки и в дальнейшем положительно влияет на экономическую эффективность предлагаемых робото-медицинских систем.
Известны патенты на устройства и инструменты для проведения остеосинтеза в нейрохирургии:
RU 64046 U1 (26.02.2006) - устройство для введения транспедикулярных винтов, состоящее из стержня Т-образной формы и муфты-направителя. Данное устройство облегчает процесс введения транспедикулярных винтов, обеспечивает надежность фиксации позвонков, уменьшает продолжительность операции и повышает эффективность стабилизации позвоночника.
RU 114833 U1 (19.08.2011) - устройство для завинчивания гаек и болтов в глубине операционной раны, состоящее из плоского прямоугольного корпуса, проксимальный конец которого скошен под углом в 45°. Данное устройство обеспечивает более плотную фиксацию между прямоугольным зубчатым колесом, выполненным со сквозным каналом в форме равностороннего шестигранника, с головкой болта, а также увеличивает компрессионный эффект при фиксации пластин к остистым отросткам.
RU 2615863 С2 (12.05.2015) - эндопротез тела позвонка для малоинвазивного (торакоскопического) спондилодеза, инструмент для имплантации эндопротеза с фиксирующим устройством. Данное устройство и инструмент используют в операциях переднебокового спондилодеза в хирургическом лечении переломов и патологических процессов грудных и поясничных позвонков.
Несмотря на то, что вышеописанные устройства и инструменты используют в нейрохирургии для проведения остеосинтеза, они имеют различные функции, конструктивно не объединяемые на единой базе, а также ни одно из них не имеет датчиков или чувствительных элементов, позволяющих проводить измерение сил и моментов.
Известны патенты на устройства и инструменты с возможностью измерения силы:
US 6730021 В2 (04.05.2004), US 9049989 В2 (09.06.2015) - разделители тканей с возможностью измерения силы в одном направлении, ее индикацией, включая предельное значение. Данные устройства представляют собой ретракторы, которые позволяют хирургу измерять и контролировать значение силы ретракции во время проведения операций. Однако, представленные устройства узкоспециализированы только для выполнения одной функции - ретракции.
US 2006/0025656 А1 (02.02.2006) - ретракционное устройство с измерением силы. Данное устройство включает в себя несколько последовательно закрепленных ретракторов, каждый из которых имеет возможность измерять силу, однако данное устройство также имеет ограниченный функционал, направленный только на ретракцию.
Вышеперечисленные ретракторы имеют возможность проводить измерение сил и моментов, однако, их стационарные базы не предполагают возможности внедрения других хирургических инструментов.
Известен патент RU 2322212 С1 (24.11.2004), который описывает комплект инструментов для имплантации протеза межпозвонкового сустава. Данное изобретение используется в нейрохирургии и включает в себя комплект инструментов для имплантации протеза межпозвонкового сустава в промежуток между телами двух позвонков, в который входят несколько различных инструментов, однако, они также не имеют общей базы, и возможностей по измерению силы.
Известен патент ЕР 3473202 А1 (24.04.2019), который описывает способ применения робототехнической системы для минимально инвазивной хирургии в различных направлениях медицинской практики. Предлагаемое авторами патента изделие способно проводить измерения сил и моментов, воздействующих на разные сменные хирургические инструменты. Однако, вместо ручки, которая может быть использована хирургом для проведения мануальной манипуляции, данное устройство уже предполагает наличие манипулятора, который заменяет руку человека. В таком случае, цель спроектировать робототехническую систему с оптимальными конструктивными параметрами выполняется только после имплементации ее неоптимизированного варианта. Это ведет к значительным экономическим затратам на разработку конструкции, которая заведомо будет обладать ложными показателями. Кроме того, авторами не конкретизируются виды переходных соединений между используемыми инструментами и манипулятором, а также способ их смены. Нельзя не отметить, что авторы данного патента не подразумевают отдельное мануальное использование хирургом предлагаемого устройства вне манипулятора. А в случае установки фиксатора датчика с инструментами в виде кнопки, схожей с кнопкой, приведенной в патенте RU 2080454 С1 (27.05.1997), робототехническая система, предложенная авторами ЕР 3473202 А1 (24.04.2019), не будет обладать требуемой точностью.
В качестве ближайшего аналога (прототипа) выбран патент RU 2261648 С1 (11.02.2004). Это устройство для освещения раневого канала при хирургическом лечении внутримозговых кровоизлияний. Данное устройство имеет одну единую базу - ручку, на которую устанавливаются различные нейрохирургические шпатели. Однако, данная ручка не предполагает установку других хирургических инструментов и также отсутствуют датчики или чувствительные элементы, позволяющие проводить измерение сил и моментов от взаимодействия с различными тканями.
Раскрытие изобретения
Предлагаемое изобретение направлено на решение задачи измерения сил и моментов, возникающих от взаимодействия сменных (имеющих возможность замены) хирургических инструментов с тканями человека (кости, мясо, кожа, нервы, ткань мозга, десен, глаз и т.д.).
Технический результат - получение количественных данных о силах и моментах, возникающих от манипуляций хирургическими инструментами во время проведения нейрохирургических операций. Границы измерения сил и моментов зависят от установленного датчика измерения сил и моментов, от размера и веса каждого инструмента, используемого для конкретно выбранной хирургической операции, а также от вида мануальных хирургических манипуляций.
Поставленная задача решается, а заявленный технический результат достигается тем, что в многофункциональном устройстве для измерения сил и моментов, конструктивно основанном на единой ручке, встроен датчик, измеряющий силы и моменты, и имеется набор сменных хирургических инструментов в основном, используемых для выполнения операций в нейрохирургии, включающих инструменты для установки или удаления внутренних фиксирующих устройств, и следующие инструменты: долото, ретрактор, стамеска, шпатель, проводник, щуп, распатор, скальпель, шило, дрель (сверло) и т.д., которые устанавливаются на датчик сил и моментов при помощи нескольких переходников (фланцев).
Заявленное техническое решение позволяет, в отличие от ближайшего прототипа, измерять силы и моменты, возникающие от взаимодействия сменных хирургических инструментов с тканями человека с учетом веса и размера сменного инструмента, а также устанавливать значительно большее количество сменных хирургических инструментов. Использование этого прибора позволит в дальнейшем разработать конструкцию манипулятора робототехнической системы с оптимальной жесткостью и весом, исключая необходимость сборки предварительного неоптимизированного варианта конструкции. Использование установок с большей, чем необходимо жесткостью и весом приведет к увеличению размера манипулятора, его стоимости и усложнит его применение в нейрохирургии.
Краткое описание чертежей
Изобретение иллюстрируется изображениями, где:
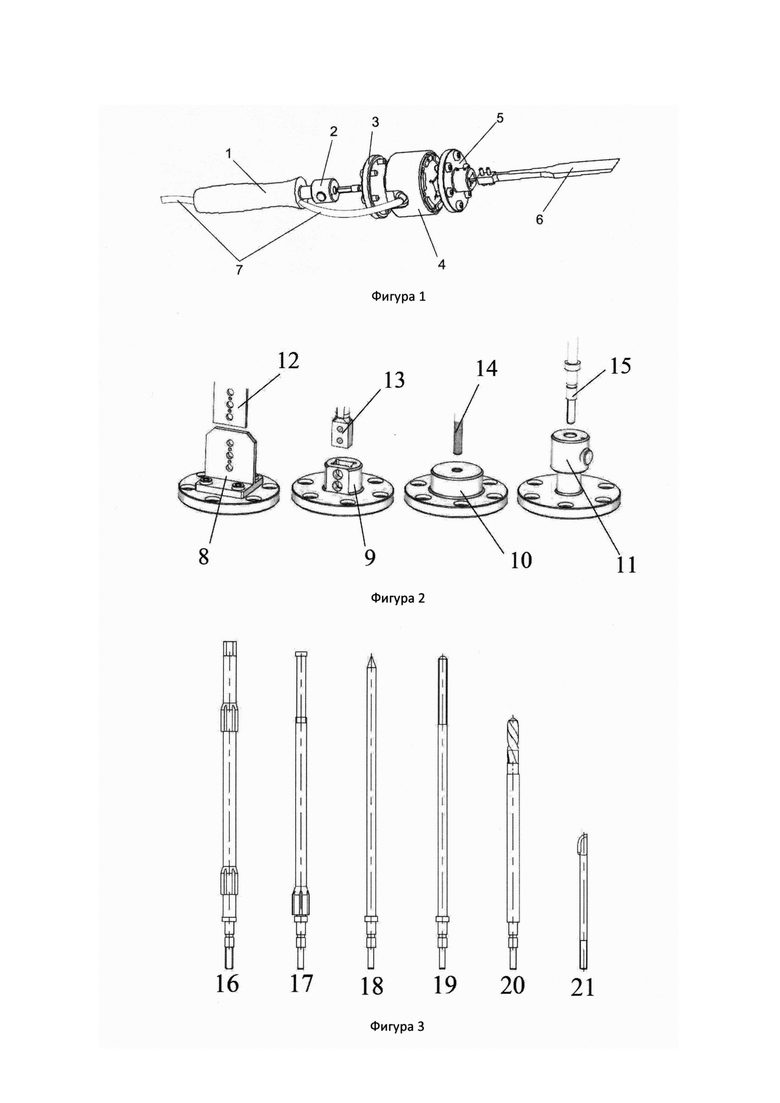
на рисунке 1 показана конструкция многофункционального устройства со сменными хирургическими инструментами для измерения воздействующих на них сил и моментов
на рисунке 2 показан набор типовых соединений, обеспечивающих плюрализм устанавливаемых хирургических инструментов и позволяющих производить их смену
на рисунке 3 показана первая часть набора сменных хирургических инструментов, устанавливаемых в многофункциональное устройство измерения сил и моментов
на рисунке 4 показана вторая часть набора сменных хирургических инструментов, устанавливаемых в многофункциональное устройство измерения сил и моментов
на рисунке 5 показана система обработки данных многофункционального устройства со сменными хирургическими инструментами для измерения воздействующих на них сил и моментов
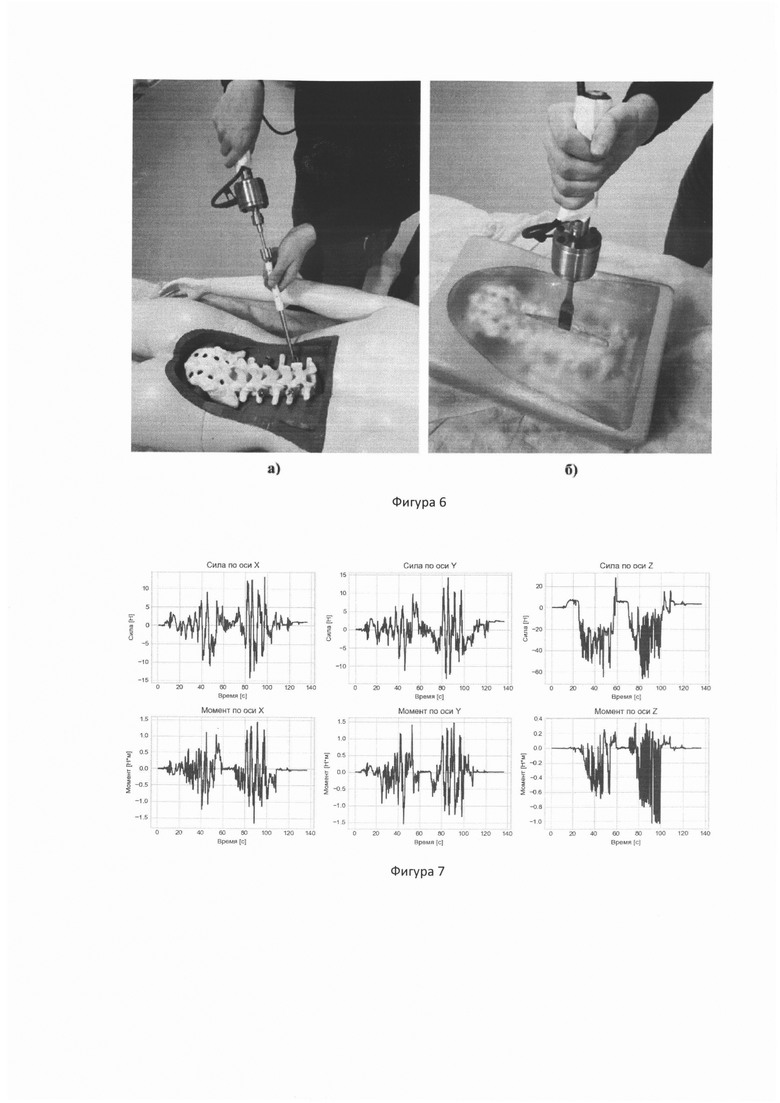
на рисунке 6 (а) и (б) показаны фотографии экспериментальных исследований по измерению сил и моментов при помощи многофункционального устройства на фантомах спины
на рисунке 7 показаны графики измеренных значений сил и моментов, возникающих при вкручивании транспедикулярного винта
на рисунке 8 показаны графики измеренных значений сил и моментов, возникающих при раздвижении мягких тканей
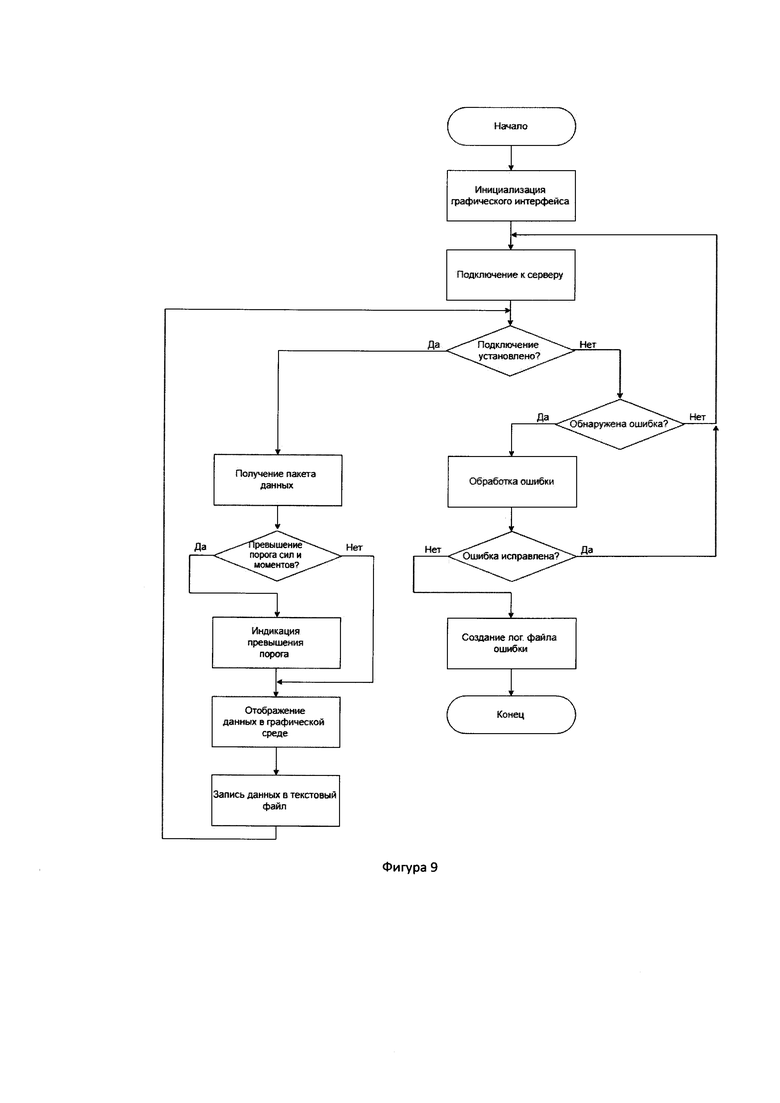
на рисунке 9 показан алгоритм работы программного обеспечения человеко-машинного интерфейса
на рисунке 10 показан алгоритм программы, исполняющийся контроллером системы обработки данных с датчика
Позиции, приведенные на изображениях, соответствуют следующему:
1. Ручка, предназначенная для мануальных манипуляций, проводимых хирургом, являющаяся единой базой для многофункционального устройства.
2. Крепление с фиксатором в виде кнопки, позволяющее устанавливать некоторые сменные хирургические инструменты, а также переходной фланец для крепления датчика измерения сил и моментов.
3. Переходной фланец для датчика измерения сил и моментов.
4. Датчик измерения сил и моментов.
5. Фланец, обеспечивающий установку сменных хирургических инструментов.
6. Пример инструмента из набора сменных хирургических инструментов малогабаритная стамеска или долото с прямоугольным креплением.
7. Провод, обеспечивающий передачу данных к модулю обработки данных.
8. Фланец, обеспечивающий установку сменных хирургических инструментов для соединения внахлест.
9. Фланец, обеспечивающий установку сменных хирургических инструментов для прямоугольного соединения.
10. Фланец, обеспечивающий установку сменных хирургических инструментов для резьбового соединения.
11. Фланец, обеспечивающий установку сменных хирургических инструментов для цилиндрического соединения.
12. Крепление сменного хирургического инструмента для соединения внахлест.
13. Крепление сменного хирургического инструмента для прямоугольного соединения.
14. Крепление сменного хирургического инструмента для резьбового соединения.
15. Крепление сменного хирургического инструмента для цилиндрического соединения.
16. Сменный хирургический инструмент для закручивания транспедикулярных гаек с цилиндрическим креплением.
17. Сменный хирургический инструмент для закручивания транспедикулярных винтов с цилиндрическим креплением
18. Сменный хирургический инструмент - шило с цилиндрическим креплением.
19. Сменный хирургический инструмент - метчик для нарезания резьбы с цилиндрическим креплением.
20. Сменный хирургический инструмент - сверло для прорезки отверстий с цилиндрическим креплением.
21. Сменный хирургический инструмент - скальпель с резьбовым креплением.
22. Сменный хирургический инструмент - ретрактор с прямоугольным креплением.
23. Сменный хирургический инструмент - малогабаритный ретрактор с прямоугольным креплением.
24. Сменный хирургический инструмент - стамеска или долото с прямоугольным креплением.
25. Сменный хирургический инструмент - малогабаритная стамеска или долото с прямоугольным креплением.
26. Сменный хирургический инструмент - малогабаритный шпатель с прямоугольным креплением.
27. Сменный хирургический инструмент - шпатель с прямоугольным креплением.
Осуществление изобретения
Многофункциональное устройство для измерения сил, воздействующих на инструменты при проведении нейрохирургических операций это изобретение, имеющее несколько исполнений, позволяющих проводить измерения сил и моментов в ходе проведения операций в нейрохирургии.
Многофункциональное устройство для измерения сил, воздействующих на инструменты при проведении нейрохирургических операций показано на рисунке 1, оно состоит из ручки 1, имеющей крепление 2 с фиксатором в виде кнопки, переходного фланца 3 для крепления датчика измерения сил и моментов 4 и фланца 5, обеспечивающего установку сменных хирургических инструментов, например 6. Провод 7 используется для передачи данных от датчика измерения сил и моментов к системе обработки данных с датчика измерения сил и моментов, которая показана на рисунке 5. Она состоит из модуля обработки, который обменивается с контроллером, который управляет процессом преобразований и обработки данных. Модуль обработки и контроллер питаются при помощи модуля питания, напряжение на который подается от источника питания. Данные о силах и моментах с системы обработки данных по интерфейсам 2 и 3 передаются пользователю в человеко-машинный интерфейс - персональный компьютер, который имеет программный интерфейс, отображающий в графической форме и позволяющий записать или дополнительно обработать полученные измерения.
Человеко-машинный интерфейс в многофункциональном устройстве включает в себя возможность предупреждать о приближении к границе рабочего диапазона измеряемых значений сил и моментов датчика, а также предупреждать о приближении критической ситуации, в которой возможен разрыв и пробой тканей, с которыми взаимодействуют сменные хирургические инструменты во время проведения операции. Предел измеряемой силы устанавливает нейрохирург в программном обеспечении, основываясь на своем опыте и данных, полученных путем множественных экспериментальных исследований. Программное обеспечение многофункционального устройства, установленное в человеко-машинном интерфейсе, также способно выводить на экран данные силы и момента и сигнализировать о приближении к критическим ситуациям визуально и при помощи звуковых сигналов.
Алгоритм работы программного обеспечения человеко-машинного интерфейса представлен на рисунке 9. На первом этапе работы программы происходит инициализация графического интерфейса приложения. Далее осуществляется попытка подключения к серверу системы обработки данных с датчика. В случае успешного подключения запускается цикл опроса системы обработки данных, при котором осуществляется получение пакета данных, проверка данных на превышение предельных пороговых значений, отображение данных в графической среде и запись в текстовый файл. В случае, когда устройство не может подключиться к хост серверу происходит проверка на наличие ошибки. Отрицательный результат проверки на ошибку возвращает систему на этап попытки подключения к серверу, а положительный запускает режим обработки ошибки.
Алгоритм программы, исполняющийся контроллером системы обработки данных с датчика представлен на рисунке 10. После подачи питания контроллер осуществляет инициализацию сервера для подключения клиентов по протоколам обмена данными с последующей возможностью получения управляющих команд и передачи данных полученных из блока АЦП. В случае отсутствия ошибок сервер переходит в режим ожидания клиента. В момент подключения клиента запускается бесконечный цикл считывания данных с блока АЦП с последующей передачей данных клиенту. После каждой передачи осуществляется проверка на наличие ошибки, положительный результат которой, так же, как и в случае обнаружения ошибки на этапе инициализации сервера, осуществляет переход в режим обработки ошибки.
Патентуемое многофункциональное устройство способно измерять усилия и моменты в соответствии с функциями устанавливаемых сменных хирургических инструментов. Каждый присоединяемый к многофункциональному устройству хирургический инструмент, обладает своим назначением или функцией, силовая картина которой становится известной благодаря измерению сил и моментов. Исходя из требований гибкости, устройство реализуется на базе многокомпонентного датчика сил и моментов, который включает в себя измерение различных сил и моментов, например, измерение трех сил датчика вдоль каждой оси декартовой системы координат и трех моментов, вокруг этих осей. Однако, датчик может обладать и меньшим количеством направлений для измерения. Количество измеряемых направлений определяется спецификой выбираемого сменного хирургического инструмента.
Сменные хирургические инструменты, используемые в многофункциональном устройстве, соединяются с датчиком измерения сил и моментов. На рисунке 2 представлены четыре соединения, которые обеспечивают установку разных сменных хирургических инструментов. Соединение внахлест, которое имеет соответствующий фланец 8 и ответную часть на хирургическом инструменте 12, используется для установки плоских инструментов, которые имеют небольшую толщину и создают небольшие силы взаимодействия с мягкими тканями, направленные перпендикулярно к поверхности инструментов. Прямоугольное соединение, которое имеет соответствующий фланец 9 и ответную часть на хирургическом инструменте 13, используется для установки инструментов, которые имеют прямоугольную жесткую форму и создают большие усилия взаимодействия с мягкими тканями, направленные во все направления, включая кручение. Резьбовое соединение, которое имеет соответствующий фланец 10 и ответную часть на хирургическом инструменте 14, используется для установки инструментов, которые имеют цилиндрическую или прямоугольную форму, а также создают малые усилия взаимодействия с мягкими тканями, направленные вдоль и поперек оси инструмента, исключая вращательные силы вокруг оси инструмента. Цилиндрическое соединение, которое имеет соответствующий фланец 11 и ответную часть на хирургическом инструменте 15, используется для установки инструментов, которые имеют цилиндрическую форму и создают усилия взаимодействия с мягкими тканями, направленные вдоль оси инструмента, включая кручение.
Примеры сменных хирургических инструментов показаны на рисунке 3 и на рисунке 4. Примером сменных хирургических инструментов с соединением внахлест служат нейрохирургические шпатели, отличающиеся размером 26 и 27. Для использования прямоугольного соединения целесообразно применять нейрохирургические стамески или нейрохирургические долото (24, 25), а также ретракторы (22, 23). При установке или удалении фиксирующих устройств удобно применять цилиндрическое соединение, которое позволяет использовать сменные хирургические инструменты для завинчивания транспедикулярных винтов 17 и гаек 16, пробивания кортикального слоя кости 18 (такой инструмент как нейрохирургическое шило), нарезания отверстий в позвонках 20 (такой инструмент как нейрохирургическое сверло) и для нарезания резьбовых отверстий под транспедикулярные винты 19 (такой инструмент как нейрохирургический метчик). Для разрезания мягких тканей используется резьбовое соединение, инструментами в котором служат набор скальпелей и ножей 21.
Предложенное многофункциональное устройство существенно отличается от прототипа тем, что имеет возможность установки значительно большего количества хирургических инструментов, включая при этом возможность измерения сил и моментов, возникающих при их взаимодействии с тканями человека во время проведения операций в нейрохирургии. Многофункциональное устройство имеет ручку, предназначенную для мануальных манипуляций, имеющую крепление с фиксатором в виде кнопки, которая позволяет переключаться между возможностями использования сменных хирургических инструментов с датчиком измерения сил и моментов и без него.
Для подтверждения возможности использования многофункционального устройства для измерения сил и моментов от взаимодействия сменных хирургических инструментов с тканями человека, были проведены испытания на фантомах спины. Фотографии проводимых испытаний показаны на рисунке 6.
Пример 1:
Хирургическая манипуляция по вкручиванию транспедикулярного винта при помощи многофункционального устройства в ножку (педикулу) фантома позвонка, изготовленный из композитного пенопласта, показана на рисунке 6 (а). При выполнении этой манипуляции, максимальная сила возникала по оси Z многофункционального устройства - оси, параллельной оси вращения транспедикулярного винта, и составила 64 Н. Максимальный момент зафиксирован вокруг оси X, и составил 1.6 Н*м.
Графики измеренных значений сил и моментов, возникающих при вкручивании транспедикулярного винта продемонстрированы на рисунке 7.
Пример 2:
Хирургическая манипуляция по раздвижению мягких тканей реализована на фантоме спины, изготовленном из твердого прозрачного силикона, и показана на рисунке 6 (б). При выполнении этой манипуляции, максимальная сила возникала по оси Y многофункционального устройства и составила 34 Н. Максимальный момент зафиксирован вокруг оси X, и составил 4.3 Н*м.
Графики измеренных значений сил и моментов, возникающих при раздвижении мягких тканей продемонстрированы на рисунке 8.
Возможность получать количественные данные о силе и моментах, возникающих при взаимодействии сменных хирургических инструментов с мягкими тканями, позволяет проводить оптимальное проектирование современных робототехнических и мехатронных систем. Оптимальное проектирование предполагает различные критерии, по которым происходит поиск лучших решений. В данном случае под основным критерием оптимизации понимается жесткость конструкции, которая напрямую взаимосвязана с силой, воздействующей на разрабатываемое устройство. Подобный процесс проектирования позволяет получать удобные многофункциональные конструкции, которые позволяют проводить, упрощать, улучшать и повышать точность хирургических манипуляций, а также, за счет этого минимизировать время проведения оперативного вмешательства, облегчая работу хирургов.
С учетом изложенного можно сделать вывод о том, что поставленная задача -измерение сил и моментов, возникающих от взаимодействия разных хирургических инструментов с различными тканями - решена при помощи многофункционального устройства, а заявленный технический результат - получение количественных данных о силах и моментах, возникающих от манипуляций хирургическими инструментами во время проведения нейрохирургических операций - достигнут, исключая необходимость сборки предварительного неоптимизированного варианта конструкции робототехнической системы.
Анализ заявленного технического решения на соответствие условиям патентоспособности показал, что указанные в независимом пункте формулы признаки являются существенными и взаимосвязаны между собой с образованием устойчивой совокупности неизвестной на дату приоритета из уровня техники необходимых признаков, достаточной для получения требуемого синергетического (сверхсуммарного) технического результата. Таким образом, вышеизложенные сведения свидетельствуют о выполнении при использовании заявленного технического решения следующей совокупности условий:
 объект, воплощающий заявленное техническое решение, при его осуществлении относится области медицинской техники, а именно к устройствам и хирургическим инструментам, применяемым в нейрохирургии для работы, связанной с установкой или удалением внутренних фиксирующих устройств;
объект, воплощающий заявленное техническое решение, при его осуществлении относится области медицинской техники, а именно к устройствам и хирургическим инструментам, применяемым в нейрохирургии для работы, связанной с установкой или удалением внутренних фиксирующих устройств;
 для заявленного объекта в том виде, как он охарактеризован в независимом пункте нижеизложенной формулы, подтверждена возможность его осуществления с помощью вышеописанных в заявке и/или известных из уровня техники на дату приоритета средств и методов;
для заявленного объекта в том виде, как он охарактеризован в независимом пункте нижеизложенной формулы, подтверждена возможность его осуществления с помощью вышеописанных в заявке и/или известных из уровня техники на дату приоритета средств и методов;
 объект, воплощающий заявленное техническое решение, при его осуществлении способен обеспечить достижение усматриваемого заявителем технического результата.
объект, воплощающий заявленное техническое решение, при его осуществлении способен обеспечить достижение усматриваемого заявителем технического результата.
Следовательно, заявленный объект соответствует критериям патентоспособности «новизна», «изобретательский уровень» и «промышленная применимость» по действующему законодательству.
| название | год | авторы | номер документа |
|---|---|---|---|
| МНОГОФУНКЦИОНАЛЬНОЕ БЕСПРОВОДНОЕ УСТРОЙСТВО СО СМЕННЫМИ ХИРУРГИЧЕСКИМИ ИНСТРУМЕНТАМИ ДЛЯ ИЗМЕРЕНИЯ ИХ УГЛОВ ОРИЕНТАЦИИ В ПРОСТРАНСТВЕ И ВОЗДЕЙСТВУЮЩИХ НА НИХ СИЛ И МОМЕНТОВ ПРИ ПРОВЕДЕНИИ НЕЙРОХИРУРГИЧЕСКИХ ОПЕРАЦИЙ | 2022 |
|
RU2807937C1 |
| ЭКСПЕРТНАЯ СИСТЕМА НА БАЗЕ МЕДИЦИНСКОГО МАНИПУЛЯЦИОННОГО РОБОТА ДЛЯ ТРАНСПЕДИКУЛЯРНОЙ ФИКСАЦИИ ПОЗВОНОЧНИКА | 2023 |
|
RU2833780C1 |
| Двухслойный фантом позвонка с регулируемыми силовыми параметрами при деформировании за счёт изменения соотношения компонентов материала | 2022 |
|
RU2801492C1 |
| Роботизированный мультифункциональный лазерный хирургический комплекс | 2018 |
|
RU2693216C1 |
| МЕХАТРОННАЯ СИСТЕМА ФОРМИРОВАНИЯ ИНДИВИДУАЛЬНОГО ИНТРАОПЕРАЦИОННОГО ПОЛОЖЕНИЯ ПАЦИЕНТА | 2022 |
|
RU2803982C1 |
| УСТРОЙСТВО ДЛЯ ЧРЕСКОЖНОГО УДАЛЕНИЯ ГРЫЖ МЕЖПОЗВОНКОВЫХ ДИСКОВ ШЕЙНОГО ОТДЕЛА ПОЗВОНОЧНИКА С ЭНДОСКОПИЧЕСКОЙ АССИСТЕНЦИЕЙ | 2022 |
|
RU2790945C1 |
| СПОСОБ КОНТАКТНОЙ МИКРОСОСУДИСТОЙ ДОППЛЕРОГРАФИИ | 2001 |
|
RU2231978C2 |
| СПОСОБ РЕВИЗИОННОГО ХИРУРГИЧЕСКОГО ВМЕШАТЕЛЬСТВА НА ПОЯСНИЧНОМ ОТДЕЛЕ ПОЗВОНОЧНИКА | 2020 |
|
RU2761600C1 |
| КОМПЛЕКТ СЪЕМНЫХ ЗАХВАТОВ ДЛЯ ХИРУРГИЧЕСКОГО РЕТРАКТОРА | 2023 |
|
RU2802746C1 |
| УНИВЕРСАЛЬНЫЙ МАЛОИНВАЗИВНЫЙ ХИРУРГИЧЕСКИЙ РЕТРАКТОР | 2023 |
|
RU2803377C1 |



Изобретение относится к области медицинской техники. Устройство со сменными хирургическими инструментами для измерения воздействующих на них сил и моментов от взаимодействия с тканями пациентов при проведении нейрохирургических операций включает ручку для мануальных манипуляций, имеющую крепление с фиксатором в виде кнопки, переходной фланец для крепления датчика измерения сил и моментов, и сменные хирургические инструменты, сопрягаемые с конструктивными соединениями. Эти соединения включают соединение внахлест для установки нейрохирургических шпателей и распаторов, прямоугольное соединение для установки стамесок и долот, ретракторов, щупов и проводников; резьбовое соединение для установки скальпелей и ножей; и цилиндрическое соединение для установки инструментов для завинчивания транспедикулярных винтов и гаек, шил для пробивания кортикального слоя кости, сверл для нарезания отверстий в позвонках, и нейрохирургических метчиков для нарезания резьбовых отверстий под транспедикулярные винты. Датчик измерения сил и моментов связан с системой обработки данных. Система обработки данных включает питаемые от модуля питания контроллер и модуль обработки. Модуль обработки выполнен с возможностью обмена данными с контроллером. Контроллер имеет возможность управлять процессом преобразований и обработки данных. Система обработки данных через интерфейсы связана с персональным компьютером с возможностью отображения данных измерений в графической форме, предупреждая о приближении измеряемых сил и моментов к границе рабочего диапазона и о возможном разрыве и пробое тканей. Технический результат состоит в обеспечении проведения хирургических манипуляций за минимальное время и с высокой точностью, облегчая в результате работу хирургов. 10 ил.
Устройство со сменными хирургическими инструментами для измерения воздействующих на них сил и моментов от взаимодействия с тканями пациентов при проведении нейрохирургических операций, включающее ручку для мануальных манипуляций, имеющую крепление с фиксатором в виде кнопки, переходной фланец для крепления датчика измерения сил и моментов, и сменные хирургические инструменты, сопрягаемые с конструктивными соединениями, включающими соединение внахлест для установки нейрохирургических шпателей и распаторов, прямоугольное соединение для установки стамесок и долот, ретракторов, щупов и проводников; резьбовое соединение для установки скальпелей и ножей; и цилиндрическое соединение для установки инструментов для завинчивания транспедикулярных винтов и гаек, шил для пробивания кортикального слоя кости, сверл для нарезания отверстий в позвонках, и нейрохирургических метчиков для нарезания резьбовых отверстий под транспедикулярные винты, при этом датчик измерения сил и моментов связан с системой обработки данных, система обработки данных включает питаемые от модуля питания контроллер и модуль обработки, модуль обработки выполнен с возможностью обмена данными с контроллером, контроллер имеет возможность управлять процессом преобразований и обработки данных, а система обработки данных через интерфейсы связана с персональным компьютером с возможностью отображения данных измерений в графической форме, предупреждая о приближении измеряемых сил и моментов к границе рабочего диапазона и о возможном разрыве и пробое тканей.
| ЕР 3473202 А1, 24.04.2019 | |||
| ПНЕВМОТУРБОДВИГАТЕЛЬ ДЛЯ ПРИВОДА РУЧНОГО ИНСТРУМЕНТА | 1996 |
|
RU2080454C1 |
| US 2016081753 A1, 24.03.2016 | |||
| УСТРОЙСТВО ДЛЯ ОСВЕЩЕНИЯ РАНЕВОГО КАНАЛА ПРИ ХИРУРГИЧЕСКОМ ЛЕЧЕНИИ ВНУТРИМОЗГОВЫХ КРОВОИЗЛИЯНИЙ | 2004 |
|
RU2261648C1 |

