Область изобретения
Настоящее изобретение относится к тяговой и передающей движение установке для винтокрылых летательных аппаратов, в частности, вертолетов или наземных транспортных средств, оснащенных летающими модулями.
Описание прототипа и общей технической задачи
Винтокрылые летательные аппараты широко применяются в гражданской и военной областях благодаря их универсальности и способности выполнять маневры, недоступные для летательных аппаратов с неподвижным крылом.
В технической области винтокрылого полета в качестве тяговой и передающей движение установки чаще всего используют гидромашину, например поршневой двигатель внутреннего сгорания или газовую турбину, в сочетании с механической трансмиссией, соединенной с винтом.
Однако особенно в летательных аппаратах, в которых создание тяги возлагается на единственную газовую турбину, если она перестает работать в результате неисправности, последующим быстрым спуском летательного аппарата на землю можно управлять только благодаря авторотации винта.
Для гарантирования безопасности пассажиров летательного аппарата даже в случае отказа, тяговые установки обычно содержат два или более двигательных блока, соединенных с винтом, мощность которых избыточна относительно требований нормального полета так, что в случае отказа одного из них оставшийся работоспособным двигательный блок может поддерживать летательный аппарат в полете, восполняя мощность, потерянную в результате отказа одного из двигательных блоков.
Однако не всегда можно иметь резервированную тяговую установку, поскольку на многих летательных аппаратах по причинам, связанным со снижением веса и габаритов по существу невозможно установить более, чем один двигательный блок. В этом случае, в случае отказа, единственная возможность управлять летательным аппаратом, как было указано выше, зависит от авторотации винта. Поэтому на практике полеты над населенными пунктами вертолетам с единственной турбиной запрещены специальными правилами.
Кроме того, если винтокрылый летательный аппарат не является вертолетом традиционного типа, а транспортным средством, оснащенным колесами для движения по земле и на котором установлен летающий модуль (транспортные средства такого типа известны, например, из документов GB-A-908691 и GB-A-938686), очевидно, что в дополнение к требованиям резервированности, типичным для авиационного применения, еще более важной является необходимость в грузоподъемности и в создании системы, которая была бы как можно более компактной и могла легко устанавливаться.
Кроме того, нельзя забывать, что наиболее широкое распространение в настоящее время приобрели газовые турбины, которые устанавливаются в качестве двигательных блоков на почти все винтокрылые летательные аппараты, что приводит к хорошо известному набору проблем управления. По существу, из-за трудностей с управлением газовыми турбинами, изменение подъемной силы лопастей винта по существу достигается за счет изменения их общего шага, а не за счет изменения частоты вращения турбины (или турбин), которая по существу работает (работают) с постоянной частотой вращения. Это налагает ограничения на максимальную скорость перемещения летательного аппарата, поскольку, как известно специалистам, в условиях околозвукового потока текучей среды относительно лопасти возникают опасные вибрационные явления (околозвуковой флаттер). Поскольку относительная скорость между потоком текучей среды и лопасти в любой точке лопасти равна сумме векторов тангенциальной скорости лопасти при вращении и скорости перемещения летательного аппарата, очевидно, что наиболее критической точкой является периферия лопасти, в частности в положении, где две вышеупомянутые скорости имеют параллельные и имеющие одинаковое направление векторы. Фактически, тогда как скорость перемещения равномерна для всего винта, тангенциальная скорость является максимальной на периферии лопасти, находящейся на максимальном расстоянии от оси вращения винта. Предельной скоростью перемещения летательного аппарата является скорость, при которой поток на периферии лопасти оказывается в условиях на границе околозвукового режима, в частности при скорости 0,9 Маха (приблизительно).
Кроме того, трансмиссия механического типа, расположенная между одной или более газовой турбиной и винтом неизбежно приводят к недостатку, заключающемуся в динамическом соединении с винтами, что подразумевает, что все гармонические движения винтов приводят к аналогичным колебаниям в работе трансмиссии и самой газовой турбины (или газовых турбин, если имеется более чем одна турбина), с очевидной неравномерностью работы, что может привести к преждевременному износу компонентов, если этому явлению не противодействовать.
Наконец, механическая трансмиссия налагает существенные ограничения с точки зрения компоновки компонентов. Очевидно, что применение, например, жестких трансмиссионных валов приводит к необходимости создания внутри летательного аппарата пространств равной протяженности, способных принять в себя эти валы, при этом такие пространства по необходимости должны воспроизводить геометрию механической трансмиссии.
Цель изобретения
Целью настоящего изобретения является устранение вышеописанных технических проблем.
В частности, целью настоящего изобретения является создание тяговой и передающей движение установки для винтокрылого летательного аппарата, которая в первую очередь является резервированной для гарантии максимальной безопасности при отказе, что возможно при управлении, и которая не налагает существенных ограничений на варианты компоновки компонентов.
Краткое описание изобретения
Цель настоящего изобретения достигается с помощью тяговой и передающей движение установки для винтокрылого летательного аппарата, имеющей признаки, формирующие объект нижеследующей формулы изобретения, которая является неотъемлемой частью настоящего описания изобретения.
Краткое описание чертежей
Далее следует более подробное описание не ограничивающего примера настоящего изобретения со ссылками на приложенные чертежи, где:
Фиг. 1 - схематический вид тяговой и передающей движение установки в соответствии с данным изобретением, и
фиг. 2 - вид в перспективе, соответствующий одному варианту установки по фиг. 1.
Подробное описание изобретения
Позицией 1 на фиг. 1 обозначена тяговая и передающая движение установка в соответствии с данным изобретением. Установка 1 содержит первую гидростатическую трансмиссию 2, первый двигательный блок, в частности первую газовую турбину 4, первый винт 6, вторую гидростатическую трансмиссию, второй двигательный блок, в частности, вторую газовую турбину 10, второй винт 12, электронный управляющий блок 14 и бак 16.
Первая гидростатическая трансмиссия 2 содержит первую гидромашину для преобразования механической энергии в гидравлическую энергию, в частности, гидравлический насос 18 переменной производительности (далее для краткости именуемый "насос 18"), предпочтительно с двунаправленным потоком. Гидравлический насос 18 соединен с возможностью вращения с валом турбины 4 и содержит всасывающее отверстие 20 и напорное отверстие 22.
Напорное отверстие гидравлически соединено гидравлической линией 24 с первой гидромашиной для преобразования гидравлической энергии в механическую энергию, в частности, с первым гидравлическим двигателем 26 переменной производительности (далее для краткости именуемым "двигатель 26" или "гидравлический двигатель 26"); точнее, он соединен с его впускным отверстием 28.
Всасывающее отверстие 20 гидравлически соединено с выпускным отверстием 32 гидравлического двигателя 26. В гидравлической линии 30 установлен обратный клапан 34, предназначенный для пропускания потока текучей среды только от выпускного отверстия 32 гидравлического двигателя 26 к всасывающему отверстию 20 насоса 18. Гидравлические линии 24, 30 функционально являются двумя разными объектами, выполняющими точно определенную рабочую задачу.
В частности, специалисту понятно, что гидравлическая линия 24, которая соединяет напорное отверстие 22 насоса 18 с впускным отверстием 28 гидравлического двигателя 26 определяет ветвь высокого давления гидростатической трансмиссии 2, поскольку она соединяет отверстие нагнетания, через которые текучая среда течет под высоким давлением. Поэтому, в последующем описании гидравлическая линия 24 также будет обозначаться термином "ветвь 24 высокого давления".
Гидравлическая линия 30, наоборот, функционально является ветвью низкого давления гидростатической трансмиссии 2, поскольку она соединяет отверстия нагнетания, через которые текучая среда течет под низким давлением. Фактически гидравлическая линия 30 гидравлически соединяет выпускное отверстие 32 гидравлического двигателя 26 и всасывающее отверстие 20 насоса 18. Поэтому в нижеследующем описании она также будет обозначаться термином "ветвь 30 низкого давления".
Гидростатическая трансмиссия 2 далее содержит смазочный насос 36, имеющий всасывающее отверстие 38 и напорное отверстие 40. Всасывающее отверстие 38 гидравлически соединено с баком 16 гидравлической линией 42, в которой установлен фильтр 44. Напорное отверстие 40 смазочного насоса 36 гидравлически соединено гидравлической линией 46 с редукционным клапаном 48, который, в свою очередь, гидравлически соединен гидравлической линией 50 с картером для смазки (не показан на фиг. 1) двигателя 28.
Насос 18 переменной производительности, смазочный насос 38 и редукционный клапан 48 определяют первичную сторону гидростатической трансмиссии 2, в целом обозначенную позицией 52 и схематически показанную штриховой линией. Гидравлический двигатель 28 определяет вторичную сторону гидростатической трансмиссии 2 и, кроме того, соединен с возможностью вращения с первым винтом 6.
Более подробно, гидравлический двигатель 26 содержит выходной вал 54, соединенный с возможностью вращения с первым ведущим шкивом 56, который, в свою очередь, ремнем 60 соединен с возможностью вращения с первым ведомым шкивом 58. Ведомый шкив 58 в свою очередь соединен с возможностью вращения с винтом 6.
Таким образом, гидравлический двигатель 26 предназначен для приведения во вращение первого винта 6. С другой стороны, следует понимать, что механическое соединение между гидравлическим двигателем 26 и первым винтом 6 никоим образом не ограничено шкивами в качестве элементов трансмиссии, но эту функцию без какой-либо существенной разницы может выполнять любая механическая трансмиссия (например, каскад шестерен, цепь и т.п.).
Вторая гидростатическая трансмиссия 8 идентична первой гидростатической трансмиссии 2 и содержит вторую гидромашину для преобразования механической энергии в гидравлическую энергию, в частности второй гидравлической насос 62 переменной производительности, предпочтительно с двунаправленным потоком, содержащий напорное отверстие 64 и всасывающее отверстие 66. Напорное отверстие 64 гидравлически соединено гидравлической линией 68 со второй гидромашиной для преобразования гидравлической энергии в механическую энергию, в частности, со вторым гидравлическим двигателем 70 переменной производительности, который также предпочтительно имеет двунаправленный поток. Точнее, напорное отверстие 64 гидравлически соединено с впускным отверстием 72 гидравлического двигателя 70.
Всасывающее отверстие 66 гидравлически соединено гидравлической линией 74 с выпускным отверстием 76 гидравлического двигателя 70. Кроме того, в гидравлической линии 74 установлен обратный клапан 78, обеспечивающий возможность потока текучей среды только от выпускного отверстия 76 гидравлического двигателя 70 к всасывающему отверстию 66 насоса 62. Вторая гидравлическая трансмиссия 8 далее содержит второй смазочный насос 80, имеющий всасывающее отверстие 82 и напорное отверстие 84.
Всасывающее отверстие 82 гидравлически соединено гидравлической линией 86 с баком 16. В гидравлической линии 86 установлен второй фильтр 88, идентичный фильтру 44. Напорное отверстие 84 гидравлически соединено гидравлической линией 90 со вторым редукционным клапаном 92, который в свою очередь гидравлически соединен со картером для смазки (не показан на фиг. 1) гидравлического двигателя 70 гидравлической линией 94.
Как и в гидростатической трансмиссии 2, насос 62, смазочный насос 80 и редукционный клапан 92 определяют первичную сторону гидростатической трансмиссии 8, обозначенную в целом позицией 96, а гидравлический двигатель 70 переменной производительности определяет вторичную сторону гидростатической трансмиссии 8.
Картеры для смазки первого и второго гидравлических двигателей 26, 70 гидравлически соединены каналом 97, от которого ответвляется гидравлическая линия 97А, на которой установлен воздушно-масляный теплообменник 97В, охлаждаемый вентилятором 97С. Гидравлическая линия 97А гидравлически соединяет картеры гидравлических двигателей 26, 70 с баком 16.
Гидравлическая линия 68 функционально является ветвью высокого давления гидростатической трансмиссии 8. Поэтому в последующем описании она будет обозначаться также термином "гидравлическая ветвь 68 высокого давления". Гидравлическая линия 74 функционально является ветвью низкого давления гидростатической трансмиссии 8. Поэтому в дальнейшем описании она будет обозначаться также термином "ветвь 74 низкого давления".
Гидравлический двигатель 70 далее содержит выходной вал 98, соединенный с возможностью вращения со вторым ведущим шкивом 100, который в свою очередь соединен с возможностью вращения со вторым ведомым шкивом 102 вторым ремнем 104. Ведомый шкив 102 в свою очередь соединен с возможностью вращения со вторым винтом 12. Таким образом, гидравлический двигатель 70 предназначен для приведения во вращение второго винта 12.
Ветви 30, 74 низкого давления соединены первой запасной гидравлической линией 106, на которой установлен первый электромагнитный клапан 108. Аналогично, ветви 24, 68 высокого давления соединены второй запасной гидравлической линией 110, на которой установлен второй электромагнитный клапан 112, идентичный электромагнитному клапану 108.
Электромагнитные клапаны 108, 112 функционально соединены для их включения с электронным управляющим блоком 14, соответствующими электрическими соединениями 114, 116. Каждый электромагнитный клапан 108, 112 имеет два функциональных положения, включая положение S покоя и рабочее положение W. Положению S покоя соответствует состояние, в котором проход текучей среды по запасным гидравлическим линиям 106, 110 перекрыт, а рабочие положения W обеспечивают свободный поток текучей среды по линиям 106, 110. Электромагнитные клапаны 108, 112 удерживаются в положении покоя действием соответствующих упругих сжимающих элементов 118, 120.
Первая турбина 4 функционально соединена с первым датчиком 122 частоты вращения и с первым датчиком 124 температуры. Датчики 122, 124 соединены с соответствующими электрическими управляющими линиями 126, 128, которые функционально соединяют электронный управляющий блок 14 с первой турбиной 4. Аналогично, вторая турбина 10 функционально соединена со вторым датчиком 130 частоты вращения и со вторым датчиком 132 температуры. Кроме того, датчики 130, 132 соединены с соответствующими управляющими линиями 134, 136, которые соединяют электронный управляющий блок 14 со второй турбиной 10.
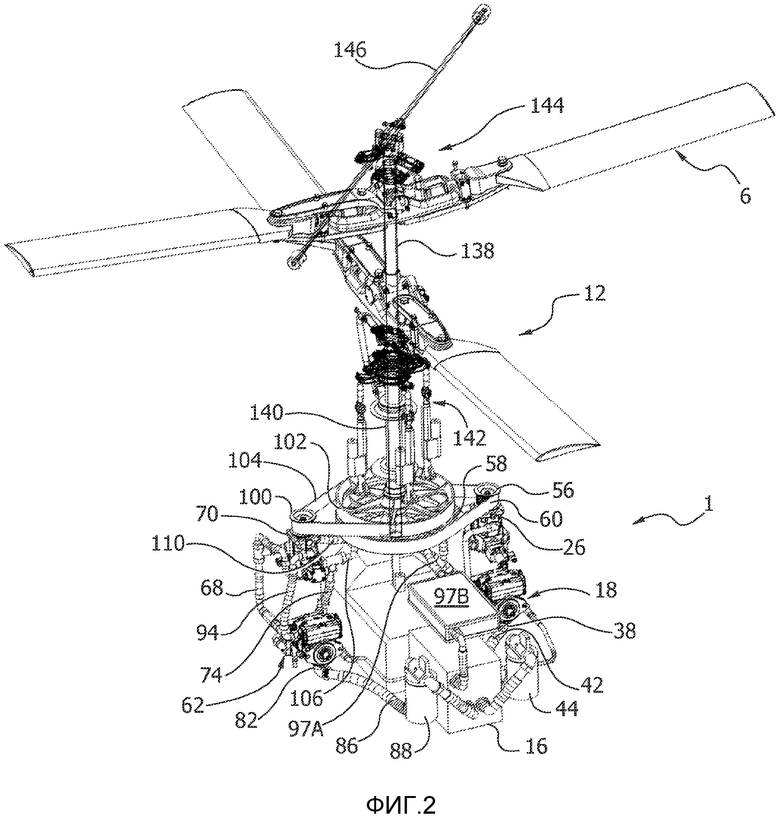
На фиг. 2 для примера показан предпочтительный вариант настоящего изобретения, где компоненты, идентичные показанным на фиг. 1, обозначены теми же ссылочными позициями. Установка 1 по фиг. 2 содержит первый винт 6 и второй винт 12, расположенные соосно относительно друг друга, как и соответствующие ведомые шкивы 58, 104. Винты 6, 12 соединены с возможностью вращения, соответственно с первым трансмиссионным валом 138 и вторым трансмиссионным валом 140, в котором проходит вал 138. Трансмиссионные валы 138, 140 соединены с возможностью вращения со шкивами 58, 102 так, чтобы винты 6, 12 могли приводиться во вращение, соответственно, двигателем 26 и двигателем 70.
Кроме того, с винтом 12 функционально соединен механизм для изменения циклического шага, обозначенный в целом позицией 142, а с винтом 6 функционально соединен механизм 144, содержащий штангу 146 стабилизатора. Механизмы 142, 144 относятся к известному типу и более подробное их описание опускается.
Кроме того, следует отметить, что гидравлические соединения между различными компонентами осуществляются предпочтительно гибкими трубами или шлангами, которые дают преимущества при эксплуатации, описание которых следует ниже.
Далее следует описание работы тяговой и передающей движение установки 1.
Как показано на фиг. 1, первый и второй винты 6 и 12 приводятся во вращение гидростатическими трансмиссиями 2 и 8, соответственно. Газовые турбины 4, 10 являются двигателями для соответствующих гидростатических трансмиссий 2, 8, с которыми они соединены. В частности, турбины 4, 10 приводят во вращение насосы 18, 62 переменной производительности, которые направляют поток текучей среды под высоким давлением на ветви 24, 68 высокого давления, откуда она поступает во впускные отверстия 28, 72 гидравлических двигателей 26, 70. Они приводят во вращения соответствующие приводные шкивы 56, 100, с помощью которых движение через соответствующие ремни 60, 104 передается на ведомые шкивы 58, 102, а от них - на соответствующие винты 6, 12.
Текучая среда, которая движется через гидравлические двигатели 26, 70, выпускается в соответствующие ветви 30, 74 низкого давления и снова подается во всасывающие отверстия 20, 66 насосов 18, 62. Во время работы смазочные насосы 36, 80 подают текучую среду под небольшим давлением в картеры для смазки гидравлических двигателей 26, 70. Затем эта текучая среда собирается в канале 97 и подается в гидравлическую линию 97А, откуда она возвращается в бак 16 после охлаждения в теплообменнике 97В.
Изменение частоты вращения винтов 6, 12 осуществляется простым и практически осуществимым способом путем изменения производительности насосов 18, 62 и гидравлических двигателей 26, 70. Таким образом, можно эксплуатировать весь диапазон преобразования крутящего момента гидростатических трансмиссий 2, 8 и, кроме того, можно устранить управление общим шагом, имеющееся на винтокрылых летательных аппаратах, поскольку его функции теперь выполняет изменение частоты вращения гидромашин, имеющихся в гидростатических трансмиссиях 2, 8.
Датчики 122, 130 частоты вращения и датчики 124, 132 температуры постоянно отслеживают соответствующие характеристики газовых турбин 4, 10. Датчики 122, 124, 130, 132 постоянно взаимодействуют с электронным управляющим блоком 14 для управления тяговой и передающей движение установкой 1 и для контроля любых возможных отказов в работе.
Далее следует описание последовательности операций, которые могут выполняться электронным управляющим блоком 14 в случае отказа одной из двух газовых турбин 4, 10.
Предположим, что газовая турбина 4 вошла в состояние отказа, и передача механической мощности на насос 18, соответственно прекратилась, в этом случае датчики 122, 124 немедленно обнаруживают отказ и наличие критической ситуации, и передают сигнал по электрическим управляющим линиям 126, 128. Из них сигнал поступает на электронный управляющий блок 14, который включает электромагнитные клапаны 108, 112. В частности, в случае отказа турбины 4 и, следовательно, остановки гидростатической трансмиссии 2, электронный управляющий блок 14 управляет открытием двух электромагнитных клапанов 108, 112, переводя из в соответствующее рабочее положение W. В такой ситуации электромагнитный клапан 108 создает гидравлическое сообщение между ветвями 74 и 30 низкого давления, а электромагнитный клапан 112 создает гидравлическое сообщение между ветвями 68, 24 высокого давления.
Таким образом, расход текучей среды, генерируемый насосом 62, который продолжает функционировать, направляется частично на ветвь 68 высокого давления, а частично - на ветвь 24 высокого давления по запасной гидравлической линии 110. Поскольку расход текучей среды, проходящей через гидравлический двигатель 26 нельзя снова подать на всасывающее отверстие 20 насоса 18 (поскольку он заблокирован из-за отказа турбины 4), он подается из ветви 30 низкого давления непосредственно на ветвь 74 низкого давления и всасывающее отверстие 66, благодаря запасной гидравлической линии 106. Следует отметить, что работа установки 1 в случае отказа турбины 10 идентична, за очевидным исключением направления потока, идущего от одной гидростатической трансмиссии к другой. В этом случае, фактически, насос 18 будет подавать часть своего расхода в ветвь 68 высокого давления благодаря запасной линии 110 и электромагнитному клапану 112 и такой же расход (кроме неизбежных утечек) будет подаваться непосредственно на ветвь 30 низкого давления через электромагнитный клапан 108.
Таким образом, электромагнитные клапаны 108, 112 выполнены для обеспечения соответственно первого гидравлического соединения между ветвями 30, 74 низкого давления по первой запасной гидравлической линии 106 и второго гидравлического соединения между ветвями 24, 68 высокого давления по второй запасной гидравлической линии 110. В основном при отказе одной из двух газовых турбин, что препятствует работе первичной стороны соединенной с ней гидростатической трансмиссии, можно использовать все еще работающую газовую турбину и гидростатическую трансмиссию, чтобы восстановить работу отказавшей гидростатической трансмиссии, позволяя сохранить управление летательным аппаратом. Следовательно, тяговая и передающая движение установка 1 имеет по существу избыточную внутреннюю структуру. Разумеется, каждая из двух газовых турбин 4, 10 должна иметь такую мощность, чтобы удовлетворять потребность в мощности двух гидравлических двигателей 26, 70, в случае отказа одной из турбин.
Описанная выше стратегия может применяться с минимальными изменениями также в случае отказа одного из насосов 18, 62. В этом случае электронный управляющий блок 14 может быть выполнен с возможностью соединения и взаимодействия с другими датчиками (например, датчиками давления и расхода, функционально соединенными с гидростатическими трансмиссиями 2, 8), и может быть выполнен с возможностью выдавать команды на отключение газовой турбины, которая приводит в действие отказавший гидравлический насос и, одновременно, переключать электромагнитные клапаны 108, 112 в рабочее положение W для обеспечения гидравлических соединений между ветвями 30, 74 низкого давления и ветвями 24, 68 высокого давления, соответственно.
В случае отказа одного из двух гидравлических двигателей 26, 70, последовательность операций отличается от описанной для случая отказа одной из турбин 4, 10. Фактически, в этом случае устанавливать гидравлическое соединение между гидростатическими трансмиссиями 2, 8 было бы бесполезно и даже опасно, поскольку отказавший гидравлический двигатель не справится с поданным на него потоком. Поэтому при отказе одного из двух гидравлических двигателей немедленно выдается команда на отмену производительности обоих гидравлических двигателей 26, 70. Таким образом, оба гидравлических двигателя получают нагрузку приводящего типа от соответствующих винтов 6, 12. Однако поскольку их производительность была отменена, как описано выше, их момент сопротивления относительно свободного вращения винтов 6, 12 по существу равен нулю (пренебрегая незначительным фрикционным моментом машины). Следовательно, лопасти винта могут работать в режиме авторотации благодаря действующим на них аэродинамическим силам, без какого-либо заметного эффекта сопротивления, создаваемого гидравлическими двигателями 26, 70. Как известно специалистам, в режиме авторотации можно управлять спуском летательного аппарата на землю.
Тяговая и передающая движение установка 1 по настоящему изобретению обладает множеством очевидных преимуществ.
Во-первых, изменение частоты вращения винтов 6, 12 можно выполнять существенно более простым способом по сравнению с устройствами известных типов, поскольку достаточно воздействия на орган управления производительностью насосов 18, 62 гидравлических двигателей 26 70, которое состоит в простой команде на смещение органа управления производительностью упомянутой гидромашин, т.е. эта операция решительно менее сложна, чем регулирование газовой турбины.
Благодаря практической выполнимости и простоте, с которой можно менять частоту вращения винтов 6, 12, можно забыть о команде общего шага лопастей винтов 6, 12, и облегчить конструкцию в целом. Фактически изменение подъемной силы лопастей достигается исключительно изменением частоты вращения винтов 6, 12. Кроме того, имеется возможность значительно увеличить скорость перемещения летательного аппарата по сравнению с летательными аппаратами известного типа, где основным ограничением скорости перемещения является не мощность тяговой установки, а условия потока, которые касаются лопастей винта.
Фактически когда поток на лопасти происходит на звуковом режиме, возникает существенное уменьшение подъемной силы, что ставит под угрозу безопасность полета. Поскольку скорость потока текучей среды, ударяющейся в каждую лопасть винтов 6, 12, имеет компонент, представленный окружной скоростью самой лопасти и компонент, образованный перемещением летательного аппарата в воздухе, то при снижении частоты вращения винтов описанным выше способом, связанный с окружной скоростью лопасти компонент уменьшается, отодвигая ее от условий звукового потока и предотвращая возникновение явления околозвукового флаттера.
Установка 1 имеет по существу модульную конструкцию, содержащую двигательный блок, в рассматриваемом случае газовую турбину, и гидростатическую трансмиссию, соединяющую оказывающую сопротивление нагрузку, в рассматриваемом случае, винт, с двигательным блоком. Установка гидростатической трансмиссии между нагрузкой и двигательным блоком позволяет развязать гармонические колебания винта относительно движения двигательного блока, который в данном случае работает без помех даже при наличии гармонических колебаний значительной амплитуды при работе винтов 6, 12.
Таким образом, газовые турбины 4, 10 могут работать равномерно, чего по существу невозможно добиться при обычных механических трансмиссиях.
Кроме того, как показано на фиг. 2, архитектура установки 1 является вполне осуществимой, по сравнению с решениями известного типа. Фактически, как показано на фиг. 2, каналы и гидравлические линии образованы гибкими трубами или шлангами, которые можно прокладывать в соответствии с требованиями в корпусе летательного аппарата, без ограничений, типичных для механических трансмиссий. Кроме того, полученная конфигурация является очень компактной, и единственный элемент, который доставляет неудобства и выбор положения которого более ограничен, является бак для керосина, из которого подается топливо на газовые турбины 4, 10.
Кроме того, следует отметить, что выполнимость компоновки компонентов установки 1 не только дает большую свободу при конструировании фюзеляжа или корпуса летательного аппарата, но и позволяет улучшить распределение веса, как функцию динамических характеристик, которые закладываются в сам летательный аппарат.
Установка 1 в соответствии с данным изобретением одинаково пригодна для использования на традиционных винтокрылых летательных аппаратах, таких как вертолет, или может являться частью летающего модуля, который может использоваться на транспортных средствах, предназначенных для перемещения по земле. В последнем случае преимущества, описанные с точки зрения компактности, выполнимости в месте размещения компонентов, играют особенно важную роль.
Наконец, хотя выше был описан вариант, в котором каждый гидравлический двигатель 26, 70 предназначен для привода во вращение соответствующего винта, установка 1 может в равной степени применяться в винтокрылом летательном аппарате (или в летающих модулях наземных транспортных средств), в которых имеется один несущий винт с вертикальной осью, и хвостовой винт. В этом случае оба выходных вала 54, 98 могут быть соединены с возможностью вращения с винтом вертикальной оси, например, зубчатой передачей, в которой вместо шкивов 56, 100 можно использовать две шестерни, которые в свою очередь входят в зацепление с зубчатым венцом, соединенным с возможностью вращения с несущим винтом. Возможно, пожертвовав в этом случае частью выполнимости установки 1, можно установить механическую трансмиссию для хвостового винта, отбирая движение от зубчатого венца, соединенного с возможностью вращения с несущим винтом. В другом случае, в зависимости от задачи, можно предусмотреть отдельный привод хвостового винта, оставив установке 1 только задачу привода во вращение несущего винта.
Не отступая от принципов настоящего изобретения, детали конструкции и варианты можно менять в широких пределах относительно варианта описанного выше только для примера и без выхода за пределы объема защиты, определенного приложенной формулой.
Изобретение относится к области авиации, в частности к конструкциям приводов винтокрылых летательных аппаратов. Тяговая и передающая движение установка (1) содержит первую гидростатическую трансмиссию (2), включающую в себя первую гидромашину (18) для преобразования механической энергии в гидравлическую энергию и первую гидромашину (26) для преобразования гидравлической энергии в механическую энергию; вторую гидростатическую трансмиссию (8), включающую в себя вторую гидромашину (62) для преобразования механической энергии в гидравлическую энергию и вторую гидромашину (70) для преобразования гидравлической энергии в механическую энергию. Каждая из первой и второй гидростатических трансмиссий (2, 8) содержит ветвь (24, 68) высокого давления и ветвь (30, 74) низкого давления, которые в каждой из первой и второй гидростатических трансмиссий (2, 8) гидравлически соединяют гидромашины. Установка (1) также содержит клапаны (108, 112), выполненные с возможностью соединения (106) между ветвью (30) низкого давления первой гидростатической трансмиссии (2) и ветвью (74) низкого давления второй гидростатической трансмиссии (8) и второго соединения (110) между ветвью (24) первой трансмиссии и ветвью (68) второй трансмиссии. Достигается повышение безопасности при отказе. 2 н. и 8 з.п. ф-лы, 2 ил. 
1. Тяговая и передающая движение установка (1), в частности, для винтокрылого летательного аппарата, отличающаяся тем, что содержит:
- первую гидростатическую трансмиссию (2), включающую в себя первую гидромашину (18) для преобразования механической энергии в гидравлическую энергию и первую гидромашину (26) для преобразования гидравлической энергии в механическую энергию;
- первый двигательный блок (4), выполненный с возможностью привода упомянутой первой гидромашины (18) для преобразования механической энергии в гидравлическую энергию;
- вторую гидростатическую трансмиссию (8), включающую в себя вторую гидромашину (62) для преобразования механической энергии в гидравлическую энергию и вторую гидромашину (70) для преобразования гидравлической энергии в механическую энергию;
- второй двигательный блок (10), выполненный с возможностью привода второй гидромашины (62) для преобразования механической энергии в гидравлическую энергию;
в которой первая и вторая гидромашины (26, 70) для преобразования гидравлической энергии в механическую энергию выполнены с возможностью приведения во вращение по меньшей мере одного винта винтокрылого летательного аппарата,
в которой каждая из первой и второй гидростатических трансмиссий (2, 8) содержит ветвь (24, 68) высокого давления и ветвь (30, 74) низкого давления, которые в каждой из первой и второй гидростатических трансмиссий (2, 8) гидравлически соединяют гидромашину (18, 62) для преобразования механической энергии в гидравлическую энергию с гидромашиной (26, 70) для преобразования гидравлической энергии в механическую энергию,
при этом установка (1) содержит средства клапана (108, 112), которые могут быть приведены в действие для создания первого гидравлического соединения (106) между ветвью (30) низкого давления первой гидростатической трансмиссии (2) и ветвью (74) низкого давления второй гидростатической трансмиссии (8) и второго гидравлического соединения (110) между ветвью (24) высокого давления первой гидростатической трансмиссии (2) и ветвью (68) высокого давления второй гидростатической трансмиссии (8).
2. Установка по п. 1, отличающаяся тем, что первая и вторая гидромашины для преобразования механической энергии в гидравлическую энергию являются первым гидравлическим насосом (18) и вторым гидравлическим насосом (62), и тем, что первая и вторая гидромашины для преобразования гидравлической энергии в механическую энергию являются первым гидравлическим двигателем (26) и вторым гидравлическим двигателем (70).
3. Установка по п. 1, отличающаяся тем, что средство клапана содержит первый электромагнитный клапан (108) и второй электромагнитный клапан (112), установленные соответственно на первой запасной гидравлической линии (106) и на второй запасной гидравлической линии (110), в которой первая запасная гидравлическая линия (106) соединяет ветвь (30) низкого давления упомянутой первой гидравлической трансмиссии (2) и ветвь (74) низкого давления упомянутой второй гидростатической трансмиссии (8) и в которой упомянутая вторая запасная гидравлическая линия (110) соединяет ветвь (24) высокого давления упомянутой первой гидростатической трансмиссии и ветвь (68) высокого давления упомянутой второй гидростатической трансмиссии (8).
4. Установка по п. 2, отличающаяся тем, что содержит электронный управляющий блок (14), взаимодействующий со средствами (122, 124, 130, 132) датчиков, функционально соединенными с первым и вторым двигательными блоками (4, 10) и выполненный с возможностью привода первого и второго электромагнитных клапанов (108, 112).
5. Установка по п. 1, отличающаяся тем, что первый двигательный блок является первой газовой турбиной (4), и тем, что второй двигательный блок является второй газовой турбиной (10).
6. Установка по п. 4 или 5, отличающаяся тем, что средства датчиков содержат для каждого из упомянутых первого и второго двигательных блоков (4, 10) датчик (122, 130) частоты вращения и датчик (124, 132) температуры.
7. Установка по п. 2, отличающаяся тем, что первый и второй гидравлические насосы (18, 62) имеют переменную производительность.
8. Установка по п. 2 или 7, отличающаяся тем, что первый и второй гидравлические двигатели (26, 70) имеют переменную производительность.
9. Установка по п. 1, отличающаяся тем, что каждая из первой и второй гидромашин (26, 70) для преобразования гидравлической энергии в механическую энергию содержит соответствующий выходной вал (45, 98), в которой выходной вал (54) первой гидромашины (26) для преобразования гидравлической энергии в механическую энергию выполнен с возможностью соединения с возможностью вращения с первым винтом (6) винтокрылого летательного аппарата, и тем, что выходной вал (98) упомянутой второй гидромашины (70) для преобразования гидравлической энергии в механическую энергию выполнен с возможностью соединения с возможностью вращения со вторым винтом (12) винтокрылого летательного аппарата, при этом первый и второй винты (6, 12) предпочтительно являются соосными друг с другом.
10. Винтокрылый летательный аппарат, отличающийся тем, что содержит тяговую и передающую движение установку (1) по любому из пп. 1-9.
| US 3614029 A, 19.10.1971; | |||
| Вертолет продольной схемы | 1975 |
|
SU645540A3 |
| Способ определения годности катушек сопротивления по старению | 1949 |
|
SU81943A1 |
| US 3823898 A, 16.07.1974 | |||

