Изобретение относится к конструкции многовинтовых беспилотных летательных аппаратов вертикального взлета и посадки и способу управления им и может быть использовано для разработки многовинтового беспилотного летательного аппарата вертикального взлета и посадки с конфигурацией, наиболее отвечающей для каждого полета. Это могут быть аппараты для доставки различных грузов от продавца к покупателю, доставка почтовой корреспонденции или посылок, транспортировка или подъем нестандартных и негабаритных грузов в ситуациях, когда отсутствует или не может быть использован подъемный кран и т.п.
Известен многовинтовой беспилотный летательный аппарат вертикального взлета и посадки, содержащий корпус, установленные на нем консоли с двигателями, воздушными винтами и средствами управления двигателями, полетный контроллер и датчики, обеспечивающие работу полетного контроллера (1). Такой аппарат предназначен для транспортирования груза заданной величины и имеет жесткую конфигурацию. При транспортировке груза малой величины аппарат работает с недогрузом, а для транспортировки более тяжелого груза требуется аппарат другой грузоподъемности.
Известен многовинтовой беспилотный летательный аппарат вертикального взлета и посадки, грузоподъемность которого определяется перед полетом и в соответствии с ним устанавливается необходимое количество двигателей с требуемой мощностью (2). Это обеспечивается заменой одновременно всех консолей, для чего консоли объединены в единый блок. В блоке может присутствовать заранее определенное число консолей и геометрия блока заранее определена.
Сборка требуемой конфигурации аппарата требует высокой квалификации исполнителя, так как при этом требуется помимо установки единого блока консолей произвести необходимые электрические соединения, установить механические тяги и произвести настройку контроллера (установить нужный режим или произвести калибровку).
Известен вертолет с мульти роторами и беспроводной связью (3) (Helicopter with multi-rotors and wireless capability), который имеет послойную конструкцию и может быть собран с различными блоками приводов, имеющих различное количество заранее определенных консолей с двигателями. При сборке блоков одновременно происходит коммутация всех электрических цепей.
Каждый блок консолей указанных устройств содержит определенное число двигателей, например, 4, 6, 8 и т.п. Общее количество двигателей в укомплектованном таким образом аппарате значительно превосходит общее число используемых для полета
двигателей, даже если используется блок консолей с максимальным количеством двигателей.
Известен полетный контроллер А2 Flight Control System американской фирмы DJI (4), ориентированный на определенные конфигурации аппарата. Местоположение консоли на аппарате и номер коннектора на контроллере, куда следует подключить данную консоль, жестко связаны. Контроллер позволяет установить 3, 4, 6 или 8 консолей и собрать 9 вариантов конфигурации аппарата. Каждая собранная таким образом конфигурация требует дополнительной предустановки и настройки контроллера. Таким образом речь идет 9 типовых аппаратах, собранных на одном контроллере.
Такая концепция формирования аппарата не пригодна для создания нестандартной конфигурации аппарата, предназначенного для подъема и транспортировки нестандартных и негабаритных грузов.
Наиболее близкими по совокупности существенных признаков является Парящий летательный аппарат со съемными роторными консолями. (Hovering aerial vehicle with removable rotor arms assemblies) (5) и Консоль воздушного винта и многовинтовой летательный аппарат (Rotor-arm assembly and a multi-rotorcraft) (6). Аппарат состоит из корпуса, установленных на нем консолей с двигателями и воздушными винтами на легкоразъемных соединениях, полетный контроллер, датчики, определяющие положение аппарата в воздухе и его динамику. Легкоразъемные соединения для установки консолей содержат также электрические соединения.
По замыслу авторов этих аппаратов, такая конструкция позволяет быстро собрать аппарат перед пуском или заменить вышедшую из строя консоль. Аппарат содержит столько консолей, сколько легкоразъемных соединений имеет корпус, т.е. полетная конфигурация аппарата не изменяется.
Цель изобретения достижение наиболее экономичных режимов доставки грузов путем оптимизации параметров аппарата к условиям каждого полета за счет сборки конфигурации под заданные требования конкретного полета.
Транспортировка и подъем нестандартных и негабаритных грузов.
При этом необходимую конфигурацию аппарата должен суметь собрать пользователь, не являющийся квалифицированным разработчиком или сборщиком летательных аппаратов вертикального взлета и посадки. Принцип сборки должен быть основан на четких и понятных для непрофессионала правилах, а ошибочная сборка аппарата не должна приводить к катастрофическим последствиям.
Поставленная цель достигается тем, что модульный многовинтовой беспилотный летательный аппарат вертикального взлета и посадки, содержащий корпус, установленные на нем на легкоразъемных соединениях консоли с двигателями и воздушными винтами, полетный контроллер, датчики, определяющие положение аппарата в воздухе и его динамику, и грузовой контейнер, содержит любое количество консолей от двух до общего количества легкоразъемных соединении, установленных на корпусе, каждая консоль выполнена в виде законченного электронно-механического устройства со своим контроллером, не менее чем с одним электрическим, бензиновым или иным двигателем, средствами управления двигателями.
Мощности одновременно установленных консолей равны или различны.
Консоли выполнены одинаковой или различной длины.
Легкоразъемные узлы соединения консолей выполнены воедино с разъемами для подключения консолей.
По крайней мере, часть консолей содержат средства управления вектором тяги, например, в виде устройства наклона двигателя, рулей отклонения струи и т.п..
Корпус выполнен в виде соединенных между собой на легкоразъемных соединениях балок, образующих различные плоские или объемный фигуры и содержит узлы для крепления груза.
Содержит легкосъемные контейнеры различных размеров или контейнер, размеры которого могут изменяться.
Содержит датчик, позволяющий определить местоположение осей вращения винтов каждой консоли относительно центра тяжести, например, триангуляционным методом.
Содержит по крайней мере три датчика веса, расположенные на опорах и снабжен механизмом, обеспечивающим установки аппарата только на эти опоры.
Способ управления многовинтовым беспилотным летательным аппаратом вертикального взлета и посадки путем определения параметров полета аппарата и подачи определенных команд на каждый двигатель и иные устройства каждой консоли в зависимости от требуемого результата, после сборки полетной конфигурации аппарата полетный контроллер опрашивает установленные на нем консоли, определяет передаточную функцию каждого двигателя и принимает параметры каждой консоли: тягу, длину консоли и т.п. и вычисляет параметры конфигурации собранного аппарата
Полетный контроллер опрашивает датчики веса, расположенные на опорах и вычисляет массу и расположение центра масс аппарата.
Полетный контроллер с помощью датчика местоположения осей воздушных винтов определяет местоположение осей воздушных винтов в системе координат с началом в центре масс аппарата.
Аппарат взлетает на определенную безопасную высоту по предварительно установленным данным, затем полетный контроллер подает управляющие команды на каждую консоль, определяет передаточную функцию каждого двигателя и использует эти данные для дальнейшего управления полетом.
Определение передаточных функции приводов производится более одного раза за полет.
Сущность изобретения поясняется следующим графическим материалом:
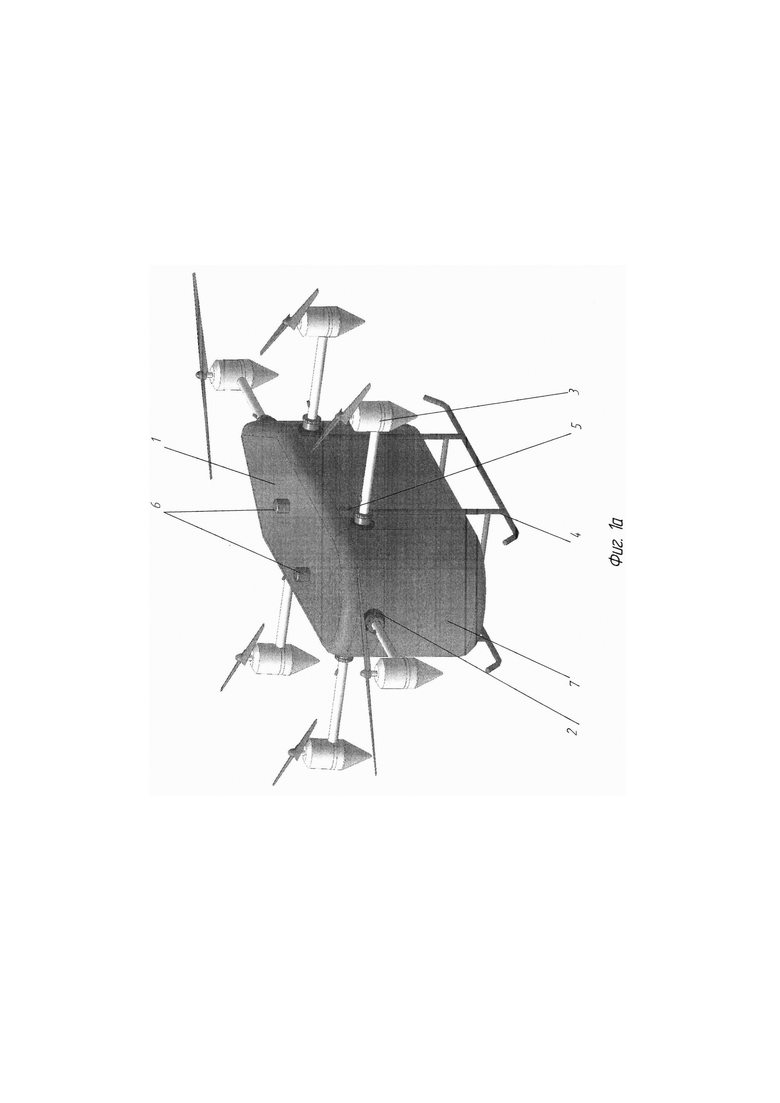
Фиг. 1а и фиг. 1b - общий вид модульного многовинтового беспилотного летательного аппарата вертикального взлета и посадки;
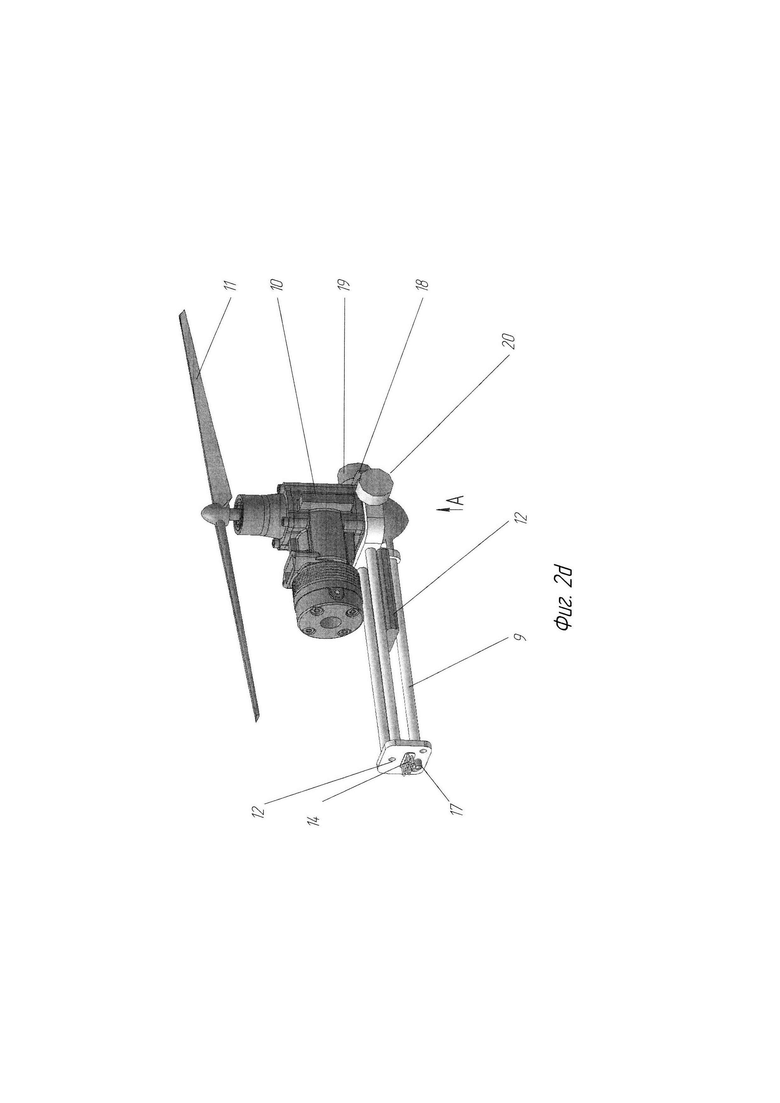
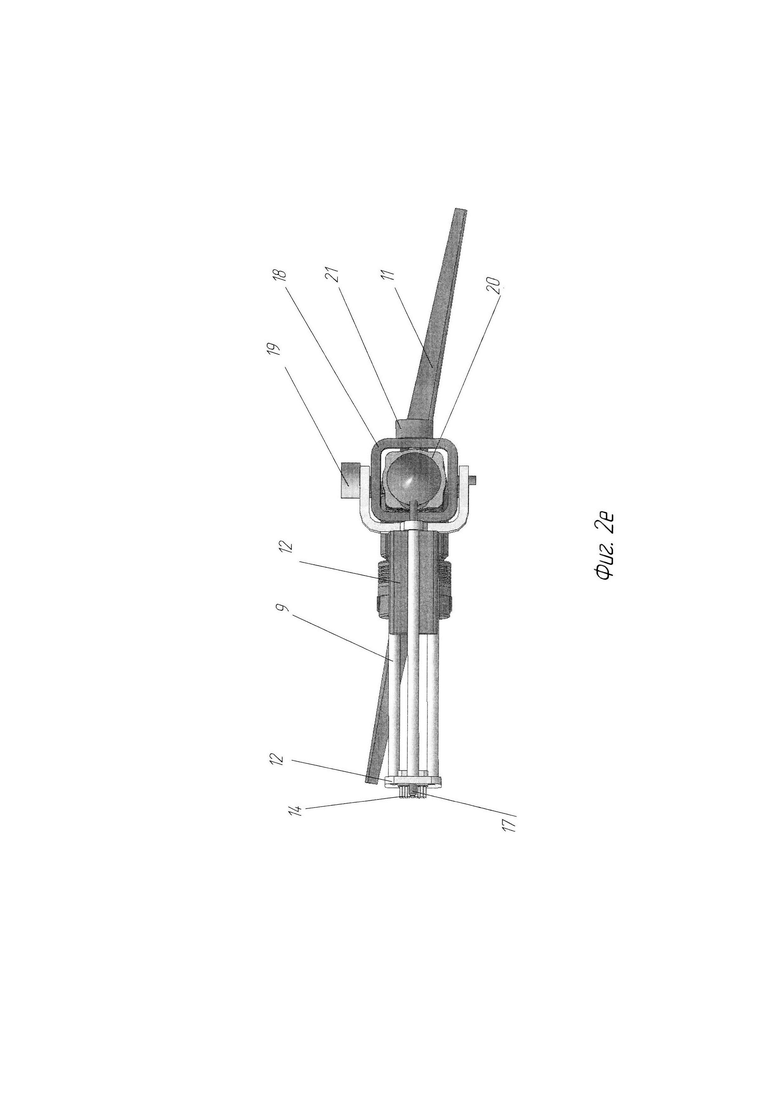
Фиг. 2а; 2b; 2с и 2d - варианты консолей модульного многовинтового беспилотного летательного аппарата вертикального взлета и посадки и Фиг. 2е - вид по стрелке А Фиг. 2d;
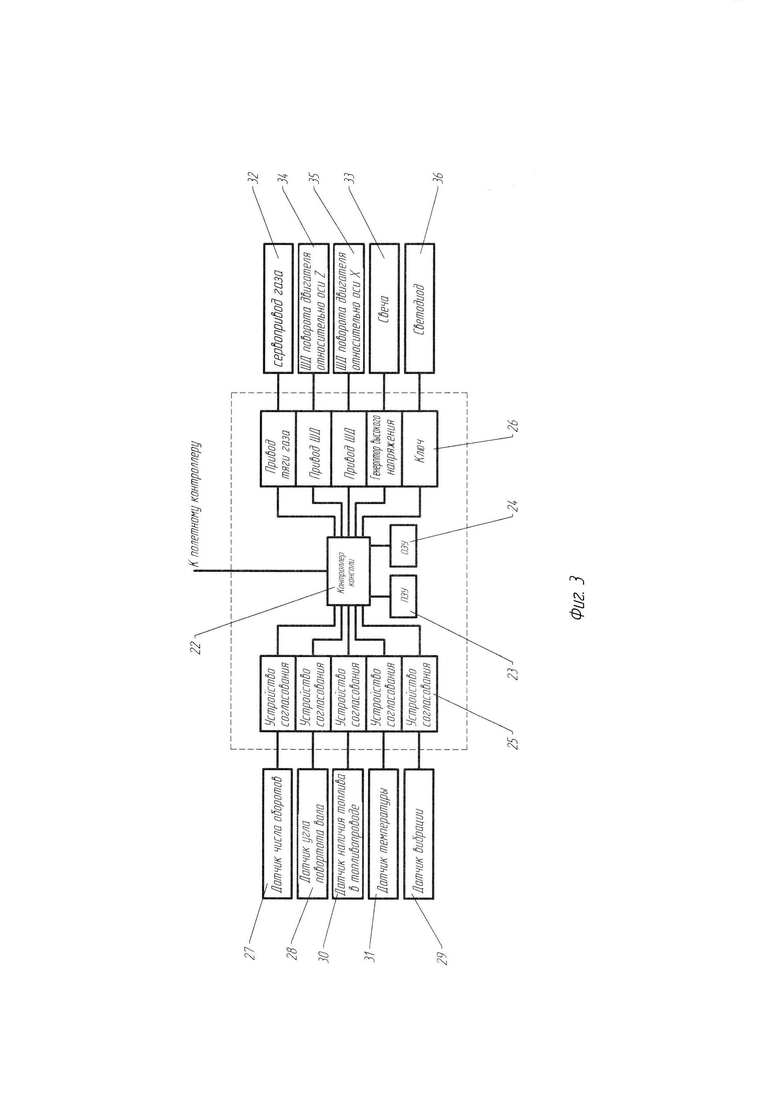
Фиг. 3 - блок-схема управления консолью фиг 2d;
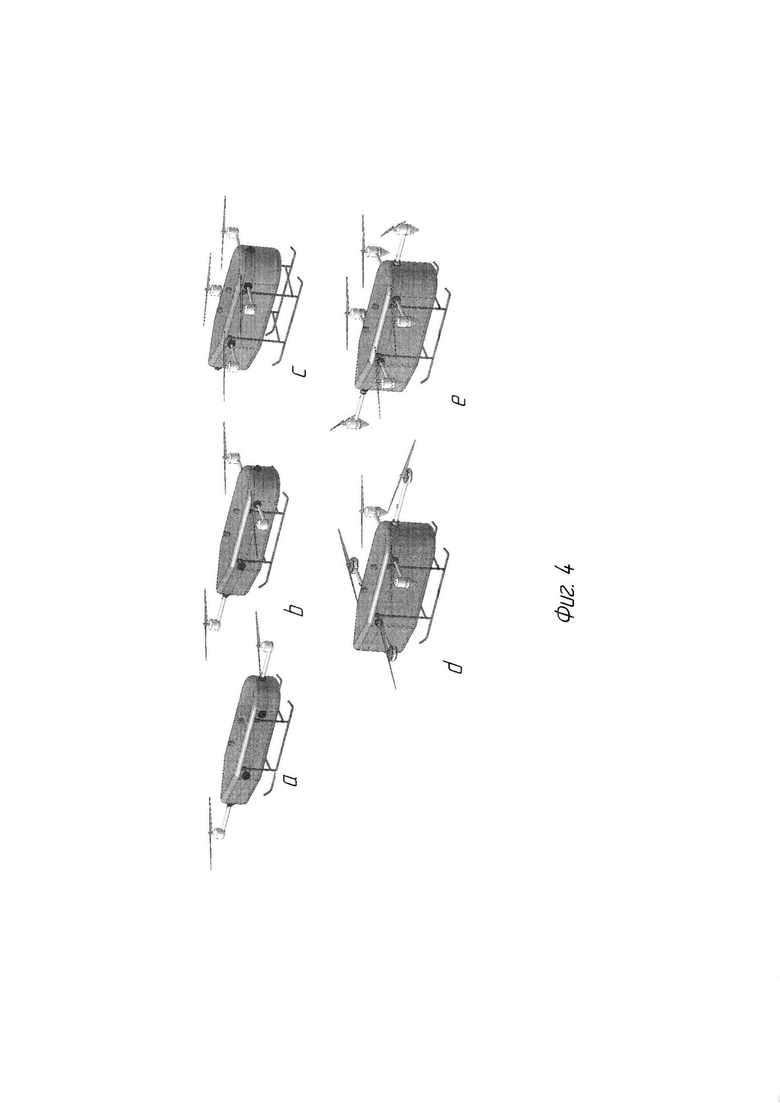
Фиг 4 - варианты сборки модульного многовинтового беспилотного летательного аппарата вертикального взлета и посадки;
Фиг. 5 - варианты контейнеров модульного многовинтового беспилотного летательного аппарата вертикального взлета и посадки;
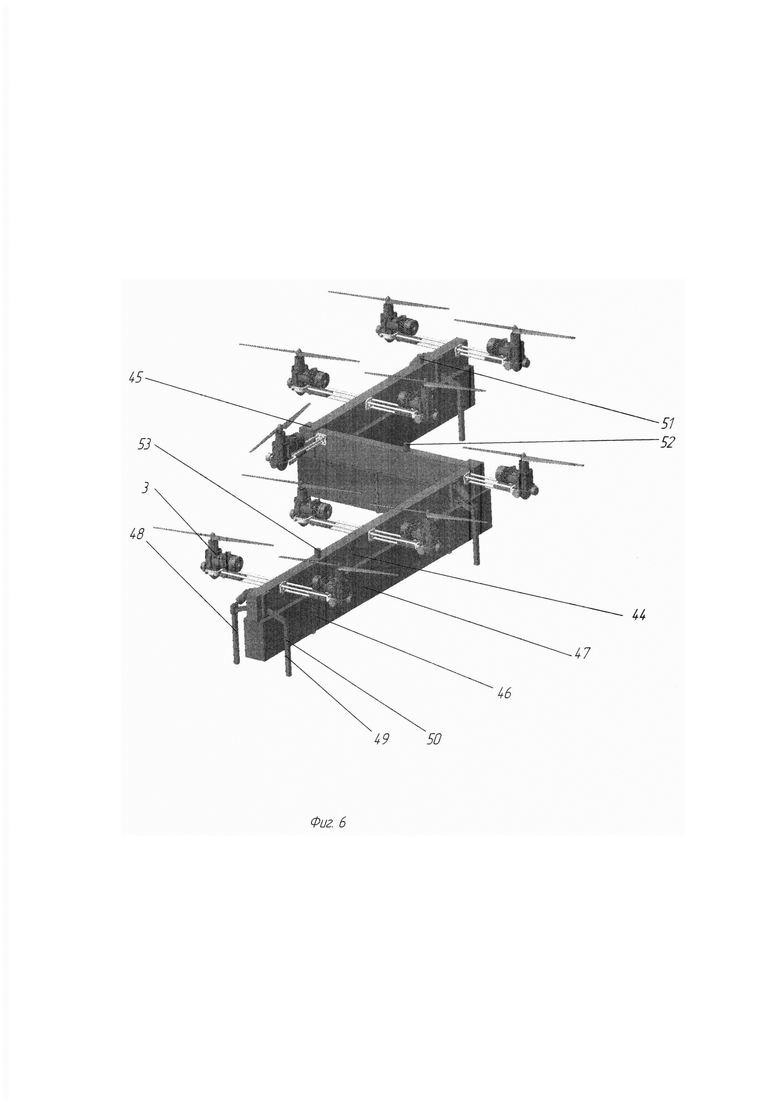
Фиг. 6 - модульный многовинтовой беспилотный летательный аппарат вертикального взлета и посадки, корпус которого выполнен в виде балок, образующих различные фигуры;
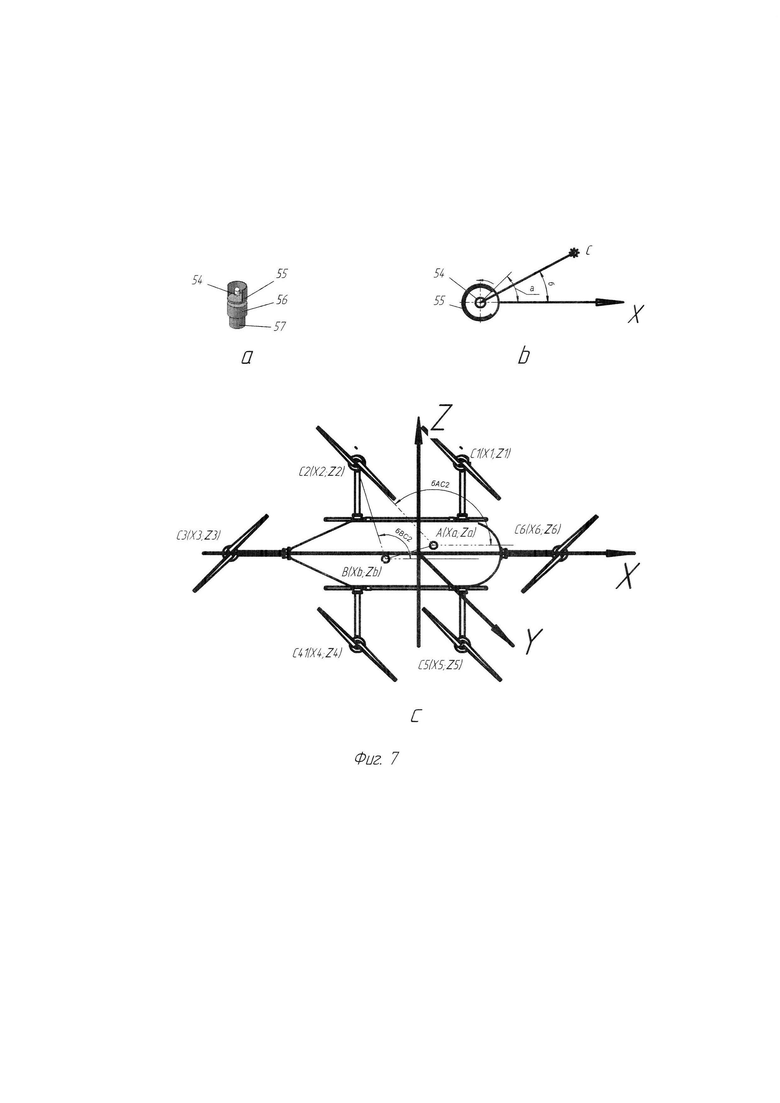
Фиг. 7 - Датчик, позволяющий определить местоположение осей вращения винтов каждой консоли относительно центра тяжести и схема, поясняющая работу этого датчика;
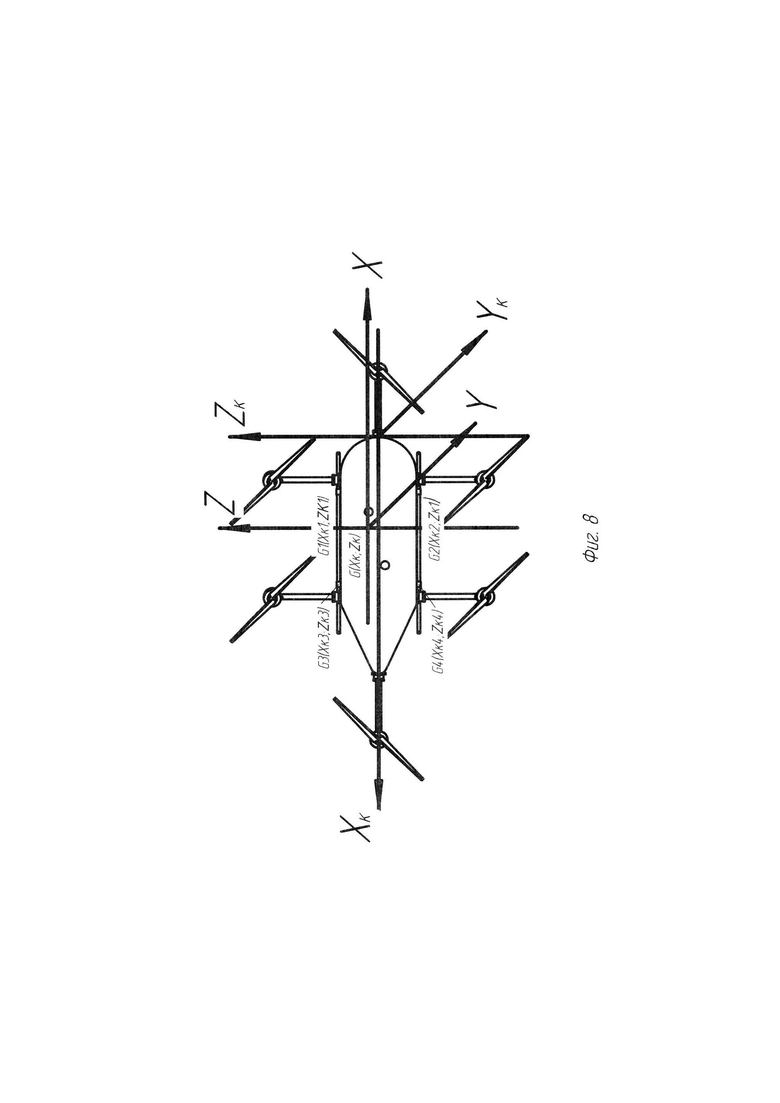
Фиг. 8 - Датчики веса, расположенные на опорах, механизм, обеспечивающий установки аппарата только на эти опоры и схема, поясняющая способ определения центра масс;
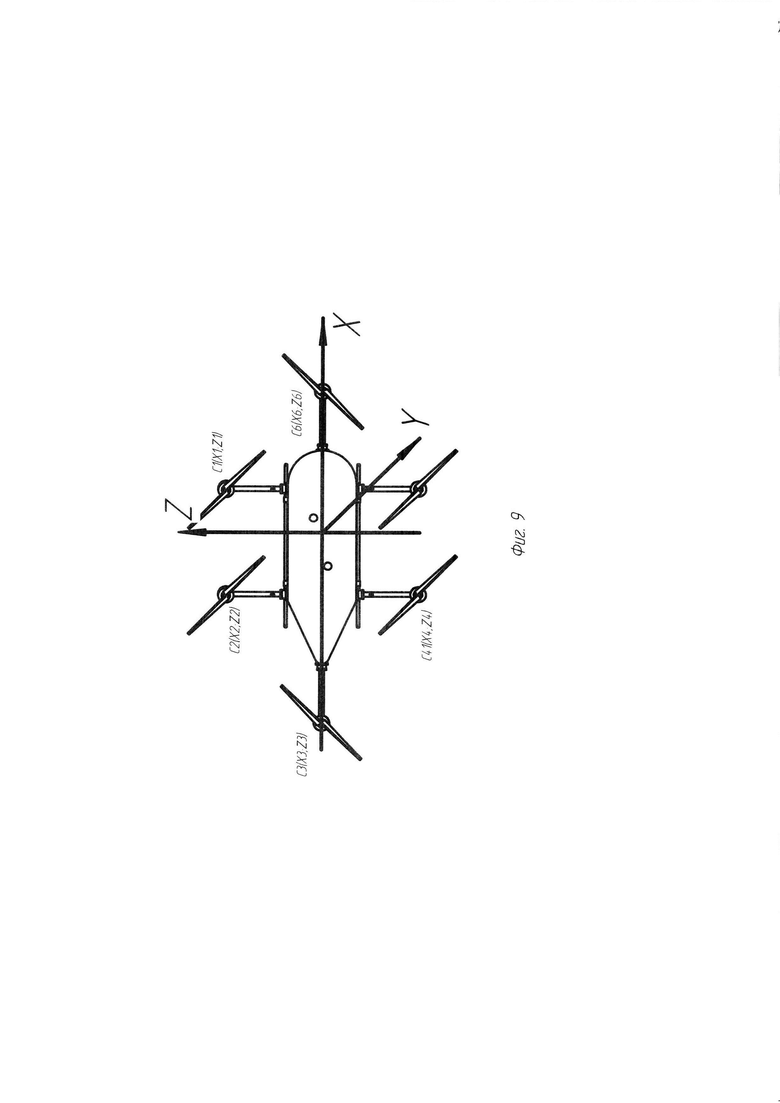
Фиг. 9 - Расчетная схема для определения воздействия двигателей на корпус с целью определения передаточных функций модульного многовинтового беспилотного летательного аппарата вертикального взлета и посадки;
Модульный многовинтовой беспилотный летательный аппарат вертикального взлета и посадки содержит (фиг. 1а) корпус 1, внутри которого установлены аккумулятор или топливный бак, полетный контроллер, гироскопы, акселерометры, высотомер, другие приборы и оборудование, обеспечивающее определение полетных параметров и управление ими. Корпус 1 содержит более двух легкоразъемных узлов 2 для соединения консолей 3. Модульный многовинтовой беспилотный летательный аппарат вертикального взлета и посадки содержит опоры 4, которые соединены с корпусом 1 через тензометрический датчик веса 5. Также на корпусе 1 установлены датчик 6 для определения местоположения осей воздушных винтов 11 консолей 3. Снизу к корпусу 1 прикреплен на легкоразъемном соединении грузовой контейнер 7.
В зависимости от мощности, эксплуатационных или иных требований консоли 2 могут содержать один или несколько электрических, или бензиновых двигателей с соответствующими средствами управления и обеспечения работой двигателей, а также содержать средства управления тягой в виде устройства наклона двигателя, рулей отклонения струи и т.п., а также средства управления ими. Модульный многовинтовой беспилотный летательный аппарат вертикального взлета и посадки с может одновременно содержать консоли различной длины, мощности и различными средствами управления тяги или без них.
Модульный многовинтовой беспилотный летательный аппарат вертикального взлета и посадки фиг. 1b отличается от аппарата фиг. 1а использованием консолей различной мощности и различной длины. Консоли 8 длиннее и мощнее консолей 2.
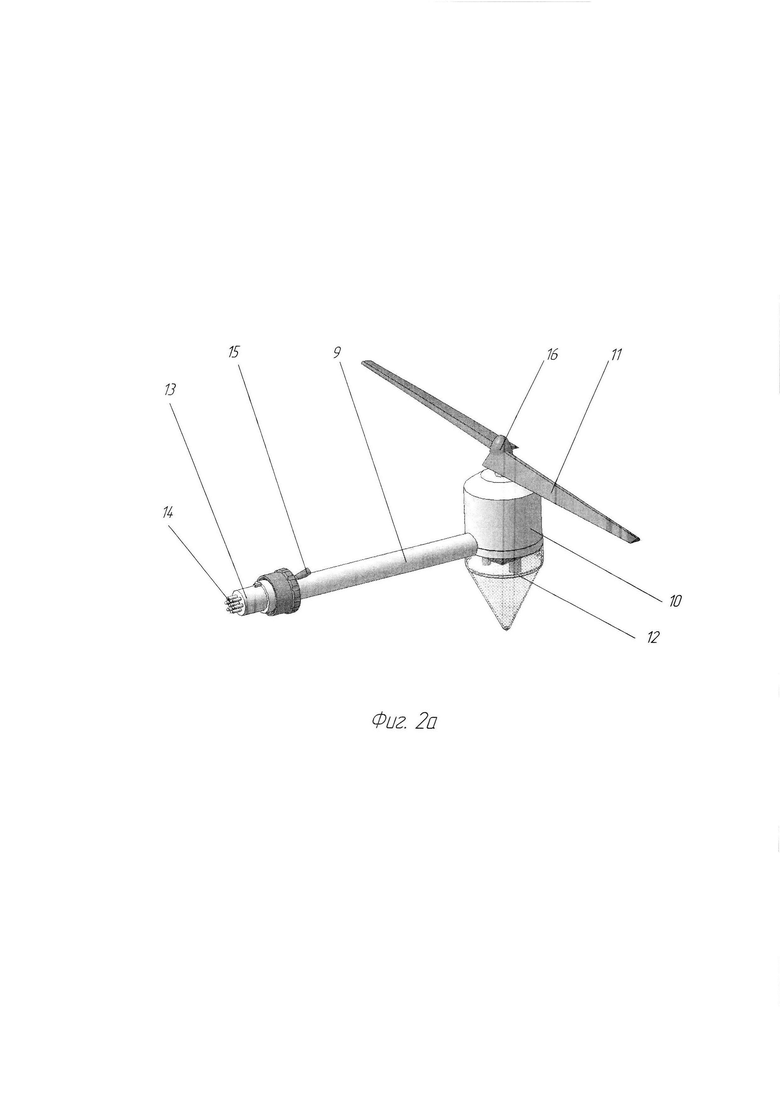
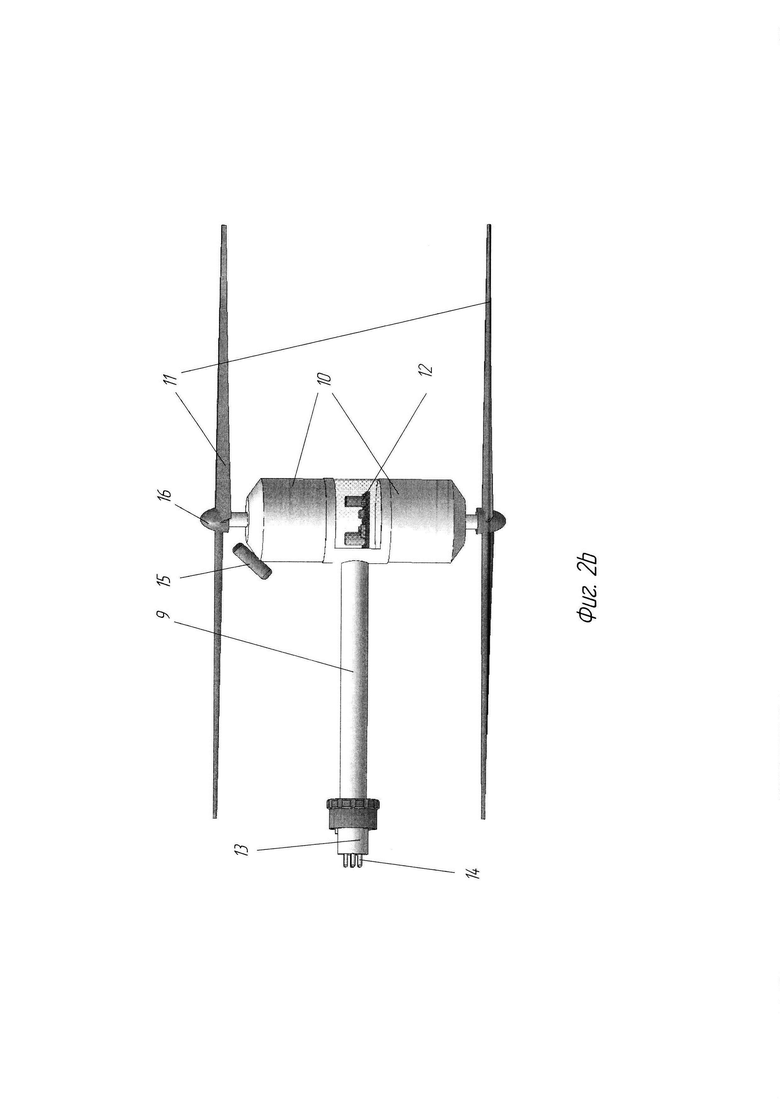
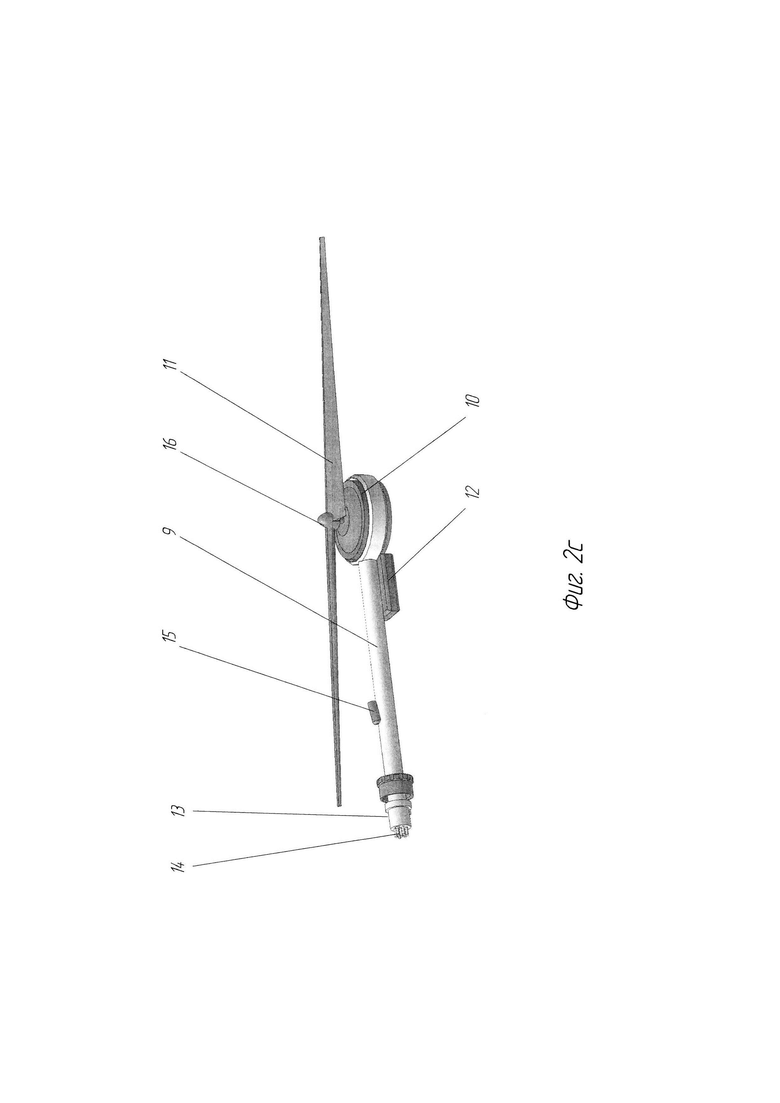
На фиг. 2а, 2b, 2с и 2d изображены различные варианты исполнения консолей, которые могут быть установлены на корпус аппарата. Причем одновременно могут быть установлены консоли одного или нескольких типов.
Консоль (фиг. 2а) содержит балку 9, двигатель 10, воздушный винт 11, контроллер консоли 12 и легкоразъемный узел соединения 13 с корпусом 1. Поз 14 отмечен электрический разъем (вилка), являющийся частью легкоразъемного соединения 13.
Легкоразъемный узел соединения 2, установленный на корпусе 1 содержит соответственно розетку. Если в конструкции аппарата предусмотрен датчик 6 определения местоположения воздушных винтов 11 триангуляционного типа консоль содержит светодиод или лазер 15 для подсветки обтекателя 16 воздушного винта 11.
Консоль фиг. 2b отличается от консоли фиг. 2а наличием двух двигателей 10 и воздушных винтов 11. Светодиод или лазер 15 подсвечивает обтекатель 16 верхнего воздушного винта. Вращение воздушных винтов 11 может быть, как встречным (безмоментная консоль), так и одного направления.
Консоль фиг. 2с имеет более мощный двигатель 10, больший размер воздушного винта 11, чем консоль фиг. 2а и, соответственно балка 9 выполнена длиннее. Соотношение мощностей консолей определяется исходя из требемого диапазона грузоподъемности.
Консоль фиг. 2d, 2е содержит бензиновый двигатель 10 и устройство отклонения тяги воздушного винта, выполненного на карданной подвеске. Двигатель 10 установлен на внутренней рамке 20, которая в свою очередь установлена на внешней рамке 18. Наружная рамка 18 поворачивается относительно балки 9 с помощью привода 19, внутренняя рамка 20 поворачивается относительно наружной рамки 18 с помощью привода 21. Указанные привода могут быть шаговым двигателем, мотор-редуктором и т.п. Легкоразъемный узел соединения 13 имеет разъемы электрического соединения 14 и легкоразъемное соединение 17 топливного шланга.
На фиг. 3 изображена блок-схема управления консолью фиг. 2d. Схема содержит контроллер консоли 22, энергонезависимое запоминающее устройство (ПЗУ) 23, оперативное запоминающее устройство (ОЗУ) 24, входы для подключения датчиков и преобразователи сигналов датчиков (устройства согласования) 25, привода 26 для подключения исполнительных органов. В приведенной схеме использованы датчики числа оборотов двигателя 27, угла поворота коленчатого вала двигателя 28, датчик вибрации 29, датчик наличия топлива в шланге подачи топлива 30, датчик температуры цилиндра 31. Исполнительными органами консоли являются привод газа (сервомотор) 32, свеча двигателя 33, шаговые двигатели поворота двигателя относительно оси консоли и поперек его 34, 35, светодиод или лазер 36 подсветки обтекателя 16 воздушного винта 11. В зависимости от конфигурации консоли могут быть другие датчики и исполнительные органы. Контроллер консоли 22 связан с полетным контроллером и аккумулятором питания. В энергонезависимом запоминающем устройстве 23 помимо программы и данных, необходимых для работы устройства имеются сведения о консоли, которые использует полетный контроллер. К ним относятся состав конфигурации консоли, мощность (тяга) двигателя, характеристика управления двигателя, момент, создаваемый воздушным винтом при номинальной тяге и характер его изменения от заданной мощности, длина консоли, характеристики управляющих приводов устройства изменения вектора тяги и т.п. Каждая консоль должна содержать свою индивидуальную схему управления и содержать необходимые для управления параметры консоли.
На фиг. 4 изображены варианты сборки аппарата в зависимости от требуемой грузоподъемности. На фиг. 4а изображен вариант с двумя консолями (бикоптер); на фиг. 4b вариант с тремя консолями (трикоптер); на фиг. 4с - с четырьмя консолями (квадрокоптер); на фиг. 4d - с пятью консолями (пентакоптер) и на фиг. 4е - с шестью (гексакоптер).
При использовании консоли одного типа аппарат фиг. 1а с шестью узлами для соединения консолей позволяет иметь подъемную силу, соответственно грузоподъемность, равную от 2-х до 6-ти подъемных сил консоли с шагом, равным подъемной силе одной консоли, т.е. перекрывает диапазон в три раза.
При использовании консолей разного типа количество вариантов сборок возрастает. Возможны следующие рабочие конфигурации аппарата при использовании консолей 2-х типов. Символом f обозначена консоль, имеющая меньшую тягу, символом F - консоль, имеющая большую тягу.
2 рабочие консоли: 2f; 2F;
3 рабочие консоли: 3f; 2f+F; f+2F; 3F;
4 рабочие консоли: 4f; 2f+2F; 4F;
5 рабочих консолей: 5f; 2f+3F; 3f+2F; f+4F; 5F;
6 рабочих консолей: 6f; 4f+2F; 3f+3F; 2f+4F; f+5F; 6F.
В указанные конфигурации включены только те варианты, которые способны удерживать аппарат в горизонтальном состоянии при нормальной центровке аппарата. При значительном смещении центра массы аппарата необходимо применять другие варианты конфигурации аппарата.
Общий диапазон грузоподъемности изменяется от 2f до 6F. Если принять соотношение тяг F/f=2, то диапазон грузоподъемности перекрывается в 6 раз. С увеличением количество мест для крепления консолей и количеством используемых типов консолей увеличивается диапазон грузоподъемности и снижается шаг.
В зависимости от габаритов и веса груза, аппарат имеет контейнеры различных габаритов 37, 38, 39 (фиг. 5b) или контейнер, размеры которого могут меняться (фиг. 5а). Такой контейнер содержит днище 40 и стенки 41, 42 и 43 различной высоты. Контейнер собирается и крепится к корпусу 1 с помощью легкоразъемных соединении.
На фиг. 6 изображен вариант модульного многовинтового беспилотного летательного аппарата вертикального взлета и посадки корпус которого выполнен в виде балок 44, образующих различные плоские или объемный фигуры на легкоразъемных соединениях 45 и содержит узлы 46 для крепления негабаритного груза 47. Аппарат встает на механизированный опоры 48, которые могут быть подняты и опоры 49 с датчиком веса 50. Датчик определения местоположения осей воздушных винтов 11 состоит их фотоприемников 51, 52 и 53.
Данная конструкция может быть использована для перевозки нестандартных негабаритных грузов или в качестве подъемного устройства, например, при строительстве взамен подъемного крана. Геометрия корпуса может как повторять геометрию груза (рис. 6), так и иметь свою геометрию, обеспечивающую надежное крепление груза, требуемую центровку и оптимальное расположение консолей.
На фиг. 7 изображена схема датчиков и расчетная схема определения местоположения осей воздушных винтов триангуляционным методом. Местоположение осей воздушных винтов определяется в связанной с центром масс системе координат. Местоположение датчиков также должны быть переведены в эту систему.
Датчик представляет собой фотодиод 54 с круговой диаграммой направленности и расположенный около него экран 55. Экран 55 приводится во вращение относительно оси фотодиода 54 двигателем 56, на вал которого также насажен энкодер 57 для определения угла поворота. Светодиод установлен на обтекателе воздушного винта или освещает его. Данный светодиод принадлежит данной консоли.
На корпусе должно быть установлено не менее двух таких фотодиодов. Необходимость установки третьего и более фотодиодов определяется компоновкой консолей. Нельзя допустить, чтобы два датчика и ось воздушного винта оказались на одной линии.
Приняты следующие обозначения.
А, В - места расположения датчиков;
С1…С6 - места расположения осей воздушных винтов;
αАС2 - угол направления на ось воздушного винта С2 датчика А;
αВС2 - угол направления на ось воздушного винта С2 датчика В.
Места расположения датчиков и определяемой оси воздушного винта образуют треугольник АВС2, у которого известны одна сторона и 2 угла. Такой треугольник решается методом тригонометрического исчисления.
На фиг. 8 изображена расчетная схема определения центра масс аппарата в горизонтальной плоскости.
Приняты следующие обозначения:
Хк, Yк и Zk - система координат, связанная конструктивной геометрией корпуса;
G1…G4 - точки размещения датчиков веса, которые размещены на опорах;
G - вес аппарата, который равен сумме весов G1…G4;
X, Y и Z - оси системы координат связанный с центром массы, которые используются для расчета динамики поведения аппарат и которые вводятся в полетный контроллер
Аппарат не должен опираться на опоры в которых отсутствует датчик веса. В приведенном варианте положение центра масс расположено не на геометрической оси аппарата. Такое расположение допустимо, но следует стремиться к симметричности аппарата относительно продольной оси, проходящей через центр масс.
На фиг. 9 изображена система координат для определения воздействия каждой консоли на аппарат.
Приняты следующие обозначения:
X, Y, Z - система координат, привязанная к центру масс аппарата;
С1…С6 - местоположение осей воздушных винтов консолей с координатами приложения тяги.
Модульный многовинтовой беспилотный летательный аппарат вертикального взлета и посадки работает следующим образом.
Предполетная сборка аппарата.
В зависимости от размеров груза выбирается размер контейнера.
Суммарный вес Gк контейнера с грузом и корпуса с аккумулятором являются базовым для подбора и установки консолей.
Каждая консоль имеет свой вес Gi и номинальную тягу Ri (например, 60% максимальной). Полезная номинальная тяга каждого двигателя равна
Первое правило подбора консолей: суммарный вес контейнера с грузом и корпуса аппарата должна равняться сумме полезных номинальных тяг используемых консолей.
Это же условие является условием зависания аппарата. Тяга консолей сверх номинального используется для маневрирования и перераспределения тяг для выравнивания аппарата.
Условием горизонтального положения аппарата в полете является отсутствие суммарного опрокидывающего момента от работы двигателей консолей. Для достижения такого результата соблюдаются следующие правило размещения консолей. Относительно центра тяжести аппарата проводятся осевые вдоль и поперек корпуса. Консоли равной тяги и равной длины устанавливаются парами симметрично этих осей. Причем, это касается обоих осей.
В более сложном варианте определяются координаты осей вращения воздушных винтов и просчитывается суммарный момент воздействия всех консолей относительно указанных осей, который должен быть равен нули или близким к нему.
Аппарат, содержащий датчики веса и датчик определения местоположения осей винтов каждой консоли после установки контроллера, производит необходимые расчеты самостоятельно и при неудовлетворительном результате оператор переустанавливает консоли в соответствии с рекомендациями программы.
Время полета аппарата определяется емкостью аккумулятора (емкостью бензобака) и расчетным суммарным потреблением консолей тока (топлива). Очевидно, чем легче груз, тем меньше потребление тока (бензина), тем больше время и дальность полета. При значительном недогрузе экономичность двигателей падает. Изменяя количество консолей в зависимости от массы груза заставляем работать двигатели в наиболее экономичном режиме.
Сборка многовинтового беспилотного летательный аппарат вертикального взлета и посадки, корпус которого выполнен в виде балок, образующих различные плоские или объемный фигуры на легкоразъемных соединениях и содержит узлы для крепления груза, является наиболее сложной задачей. Геометрия корпуса и груза каждый раз другая, центр тяжести аппарата также непредсказуем. Задача может быть решена проведением предварительных расчетов. Аппарат данного типа должен содержать датчики веса и датчик определения местоположения осей винтов каждой консоли. В этом случае решение задачи доступно оператору средней квалификации.
Определение центра масс аппарата.
Расчетная схема определения центра масс аппарата в горизонтальной плоскости представлена на фиг. 8. Если у аппарата не все опоры имеют датчик веса, механизация опор обеспечивает установку аппарата только на те опоры, которые имеют датчик веса. Производится измерение нагрузки на каждую опору. Центр тяжести в системе координат, связанной с геометрией корпуса определяется по следующим формулам.
Далее строится связанная система координат с нулем в этой точке. Определение координат осей воздушных винтов.
При подключении консоли контроллер управления полетом идентифицирует устройство (plug and play) и его местоположение (порт), считывает величину развиваемой тяги, момент вращения при номинальной тяге, длину консоли до оси воздушного винта.
У аппарата, изображенного на фиг. 1a, 1b местоположение легкоразъемных узлов соединения консолей и направление расположения консолей известно заранее. После подключения консоли, данные о данной консоли передаются на полетный контроллер. Далее простым геометрическим расчетом он вычисляет координаты расположения осей воздушных винтов.
У аппарата, собранного из балок на легкоразъемных соединениях согласно фиг. 6 узлы подключения консолей заранее не известны и места расположения осей воздушных винтов консолей определяет специальный датчик определения местонахождения осей воздушных винтов.
Определение триангуляционным методом. См фиг. 7. Экран 55 каждого фотоприемника 54 совершает вращательное движение. На определяемой консоли включается в режиме мерцания светодиод 15. Угол направления на светодиод определяется как момент поступления сигнала от светодиода 15 при вращении экрана 55. Данный угол фиксирует энкодер 57. По показаниям двух приемников строится функция каждого луча в связанной с центром масс системе координат и решается задача на пересечение двух линейных уравнений. Координата пересечения этих линии является местоположением оси вращения воздушного винта 11.
По результатам расчетов, с использованием номинальных тяг, моментов вращения и местоположения осей вращения воздушных винтов, полетный контроллер определяет пригодность сборки к полету, рассчитывает необходимые передаточные функции и задает обороты на каждую консоль.
Аппарат, собранный в соответствии с приведенными выше правилами или настроенный с помощью весовых датчиков 50 и датчиков 51, 52, и 53 определения местоположения осей воздушных винтов 11 каждой консоли при взлете на заданных режимах двигателей принимает горизонтальное положение или имеет небольшой наклон, который подлежит устранению системой управления.
Полет аппарата.
Расчетная схема для определения воздействия двигателей на корпус представлена на фиг. 9.
Каждый двигатель создает вертикальную подъемную силу Ri
Условие зависания аппарата
где m - взлетная масса аппарата.
Если эта сумма больше взлетной массы аппарата, аппарат движется вверх, если меньше - аппарат движется вниз.
Кроме того, вследствие того, что каждый двигатель разнесен от центра масс, подъемная сила их создает моменты:
По тангажу 
По крену
И моменту по рысканию, равный моменту, развиваемому двигателем
Суммарное воздействие всех двигателей определяется следующей системой уравнении.
Если консоли содержат устройства управления вектором, тяги указанного уравнения усложняются, но суть от этого не меняется. Для получения любого движения необходимо развить такие тяги воздушных винтов, которые позволят получить нужный вращательный момент и подъемную силу.
В аппарате, который собирается жестко и все двигатели равноудалены от центра масс, воздействие каждого двигателя или пары двигателей известно заранее и аппарат летает по заранее заданной жесткой логике.
Модульный многовинтовой беспилотный летательный аппарат вертикального взлета и посадки имеет на каждый полет свою конфигурацию, массу и моменты инерции, поэтому влияние каждого двигателя на поведение аппарата заранее неизвестно или известно приблизительно. В связи с этим необходимо каждый раз определять передаточные характеристики каждого двигателя 10 и устройств отклонения тяги, после чего управление аппаратом не отличается от управления аппаратом с заранее заданной конфигурацией.
Для этого после того, как аппарат взлетает на небольшую высоту, система управления тестирует работу каждого двигателя и устройств изменения вектора тяги меняя обороты и фиксируя по датчикам поведение аппарата. По результатам тестирования контроллер определяет передаточную функцию по тяге и моментам, создающим двигателем по каждой оси. Далее эта передаточная функция используется для управления аппаратом в полете.
В течение полета характеристики аппарата могут изменяться. Например, у аппаратов с бензиновым двигателем, вследствие расхода топлива, меняется вес и может измениться местоположение цента масс. Также могут быть сбои в работе двигателей. Приведенный метод тестирования может использоваться также во время полета для оптимизации управления полетом.
Таким образом, выполнение многовинтового беспилотного летательного аппарата вертикального взлета и посадки с более чем двумя узлами легкоразъемных соединений консолей и электрических и иных разъемов для подключения консолей с содержанием любого количества консолей от двух до общего количества легкоразъемных соединении, установленных на корпусе, выполнение каждой консоли в виде законченного электронно-механического устройства со своим контроллером, не менее чем с одним электрическим, бензиновым или иным двигателем, средствами управления двигателями;
В котором мощности одновременно установленных консолей равны или различны.
Консоли выполнены одинаковой или различной длины.
Легкоразъемные узлы соединения консолей выполнены воедино с разъемами для подключения консолей.
По крайней мере, часть консолей содержат средства управления вектором тяги, например, в виде устройства наклона двигателя, рулей отклонения струи и т.п.
Корпус выполнен в виде соединенных между собой на легкоразъемных соединениях балок, образующих различные плоские или объемные фигуры и содержит узлы для крепления груза.
Содержит легкосъемные контейнеры различных размеров или контейнер, размеры которого могут изменяться.
Содержит датчик, позволяющий определить местоположение осей вращения винтов каждой консоли относительно центра тяжести, например, триангуляционным методом.
Содержит по крайней мере три датчика веса, расположенные на опорах и снабжен механизмом, обеспечивающим установки аппарата только на эти опоры;
Способ управления модульным многовинтовым беспилотным летательным аппаратом вертикального взлета и посадки путем определения параметров полета аппарата и подачи определенных команд на каждый двигатель и иные устройства каждой консоли в зависимости от требуемого результата, в котором после сборки полетной конфигурации аппарата полетный контроллер опрашивает установленные на нем консоли и принимает параметры каждой консоли: тягу, длину консоли и т.п. и вычисляет параметры конфигурации собранного аппарата.
Полетный контроллер опрашивает датчики веса, расположенные на опорах и вычисляет массу и расположение центра масс аппарата.
Полетный контроллер с помощью датчика местоположения осей воздушных винтов определяет местоположение осей воздушных винтов в системе координат с началом в центре масс аппарата.
Аппарат взлетает на определенную безопасную высоту по предварительно установленным данным, затем полетный контроллер подает управляющие команды на каждую консоль, определяет передаточную функцию каждого двигателя и использует эти данные для дальнейшего управления полетом.
Определение передаточных функций приводов производится более одного раза за полет.
Таким образом выполнение модульного многовинтового беспилотного летательного аппарата вертикального взлета и посадки, а также способ управления указанным беспилотным летательным аппаратом Позволяет оптимизировать параметры аппарата под конкретные условия каждого полета, чем достигается экономичность и необходимая дальность полета. Сборка конфигурации аппарата не требует высокой квалификации и специфичных знаний оператора. Принцип сборки основан на четких и понятных для непрофессионала правилах, а ошибочная сборка аппарата не приводит к катастрофическим последствиям.
Изобретение позволяет собрать практически любую конфигурацию и геометрию аппарата для транспортировки и подъема нестандартных и негабаритных грузов.
Источники информации
1. Patent application US 2014/0131510 A1; B64C 27/08; Tao Wang; Tao Zhao; Shaojie Chen; Zhigang Ou; Unmanned aerial vehicle and operations thereof.
2 Патент РФ №2403183 B64C29/00; B64C 27/08 Воронков Ю.С., Воронков О.Ю Беспилотный летательный аппарат вертикального взлета и посадки.
3. Patent US 8,774,982 В2; В64С 27/08; John Robert Oakley; David Scott Heath. Helicopter with multi-rotors and wireless capability.
4. A2 Flight Control System. User manual V1.24, January, 2016 Revision. http://www.dji.com
5. Patent application US 2009/0283629 A1; B64C 27/08; David Kroetsch; Mike Peasgood; Cristian Cherler; Brubacher-Cressman; Cristian Cherler, Stephen Marchetti. Hovering aerial vehicle with removable rotor arms assemblies.
6. Patent application US 20130287577 Al; B64C27/08; Zhikang Lin; Wenrong Lim; Randy Yau Kee Leong; Rotor-arm assembly and a multi-rotorcraft
| название | год | авторы | номер документа |
|---|---|---|---|
| УНИВЕРСАЛЬНЫЙ МНОГОФУНКЦИОНАЛЬНЫЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ КВАДРОКОПТЕРНОГО ТИПА | 2024 |
|
RU2835704C1 |
| Автоматическая станция зарядки и обслуживания беспилотных летательных аппаратов и беспилотный летательный аппарат, работающий совместно с ней | 2019 |
|
RU2721048C1 |
| МНОГОВИНТОВОЙ БЕСПИЛОТНЫЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ ВЕРТИКАЛЬНОГО ВЗЛЕТА И ПОСАДКИ | 2014 |
|
RU2567496C1 |
| Конвертоплан | 2017 |
|
RU2657706C1 |
| Летательный аппарат вертикального взлета и посадки с дополнительными грузовыми модулями и выдвигаемыми воздушными винтами | 2021 |
|
RU2759061C1 |
| БПЛА вертикального взлета и посадки | 2020 |
|
RU2747006C1 |
| БЕСПИЛОТНЫЙ ТЯЖЕЛЫЙ ЭЛЕКТРОКОНВЕРТОПЛАН | 2013 |
|
RU2532672C1 |
| МНОГОВИНТОВОЙ БЕСПИЛОТНЫЙ ВИНТОКРЫЛ | 2016 |
|
RU2611480C1 |
| МНОГОВИНТОВОЙ ПРЕОБРАЗУЕМЫЙ БЕСПИЛОТНЫЙ ВЕРТОЛЕТ | 2014 |
|
RU2550909C1 |
| МНОГОВИНТОВОЙ БЕСПИЛОТНЫЙ ЭЛЕКТРОКОНВЕРТОПЛАН | 2014 |
|
RU2547155C1 |


Изобретение относится к конструкции многовинтовых беспилотных летательных аппаратов вертикального взлета и посадки и способам управления ими. Модульный многовинтовой беспилотный летательный аппарат вертикального взлета и посадки содержит корпус, установленные на нем на легкоразъемных соединениях консоли с двигателями и воздушными винтами, полетный контроллер, датчики, определяющие положение аппарата в воздухе и его динамику, датчик для определения местоположения осей вращения винтов каждой консоли, по крайней мере три датчика веса, грузовой контейнер. Корпус выполнен в виде соединенных между собой на легкоразъемных соединениях балок. Консоли выполнены в виде законченных электронно-механических устройств со своими контроллерами. После сборки полетной конфигурации аппарата полетный контроллер опрашивает установленные на нем консоли, а также датчики расположения осей воздушных винтов консолей и датчиков веса и использует эти параметры для управления. Обеспечивается оптимизация параметров аппарата к условиям конкретного полетного задания. 2 н. и 12 з.п. ф-лы, 14 ил.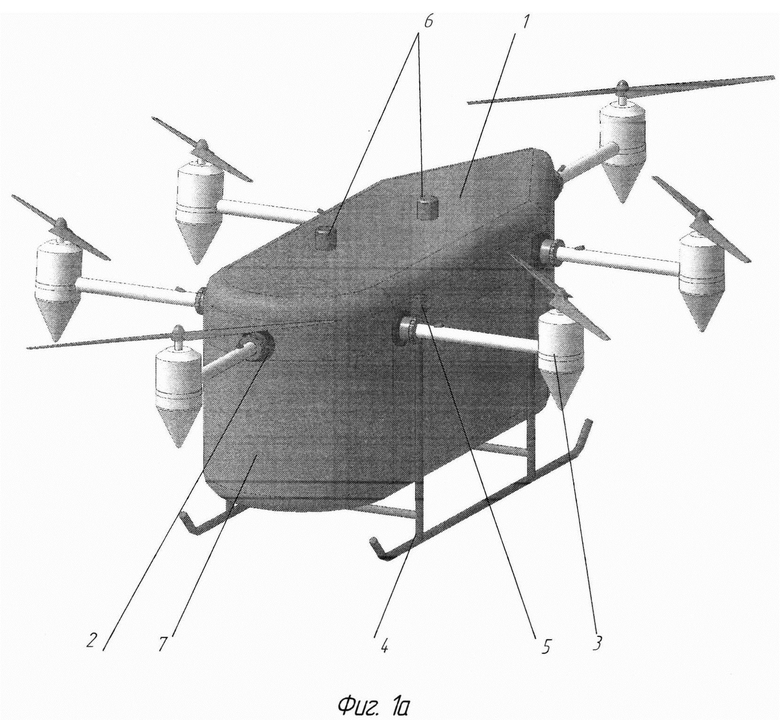
1. Модульный многовинтовой беспилотный летательный аппарат вертикального взлета и посадки, содержащий корпус, установленные на нем на легкоразъемных соединениях консоли с двигателями и воздушными винтами, полетный контроллер, датчики, определяющие положение аппарата в воздухе и его динамику, и грузовой контейнер, отличающийся тем, что содержит любое количество консолей от двух до общего количества легкоразъемных соединений, установленных на корпусе, каждая консоль выполнена в виде законченного электронно-механического устройства со своим контроллером, не менее чем с одним электрическим, бензиновым или иным двигателем и средством управления двигателем.
2. Модульный многовинтовой беспилотный летательный аппарат вертикального взлета и посадки по п. 1, отличающийся тем, что мощности одновременно установленных консолей равны или различны.
3. Модульный многовинтовой беспилотный летательный аппарат вертикального взлета и посадки по п. 1 или 2, отличающийся тем, что консоли выполнены одинаковой или различной длины.
4. Модульный многовинтовой беспилотный летательный аппарат вертикального взлета и посадки по п. 1, отличающийся тем, что легкоразъемные узлы соединения консолей выполнены воедино с электрическими разъемами для подключения консолей.
5. Модульный многовинтовой беспилотный летательный аппарат вертикального взлета и посадки по любому из пп. 1-3, отличающийся тем, что, по крайней мере, часть консолей содержит средства управления вектором тяги, например, в виде устройства наклона двигателя, рулей отклонения струи.
6. Модульный многовинтовой беспилотный летательный аппарат вертикального взлета и посадки по п. 1 или 2, отличающийся тем, что корпус выполнен в виде соединенных между собой на легкоразъемных соединениях балок, образующих различные плоские или объемные фигуры, и содержит узлы для крепления груза.
7. Модульный многовинтовой беспилотный летательный аппарат вертикального взлета и посадки по п. 1, отличающийся тем, что содержит легкосъемные контейнеры различных размеров или контейнер, размеры которого могут изменяться.
8. Модульный многовинтовой беспилотный летательный аппарат вертикального взлета и посадки по любому из пп. 1-6, отличающийся тем, что содержит датчик, позволяющий определить местоположение осей вращения винтов каждой консоли относительно центра тяжести, например, триангуляционным методом.
9. Модульный многовинтовой беспилотный летательный аппарат вертикального взлета и посадки по любому из пп. 1-6, отличающийся тем, что содержит по крайней мере три датчика веса, расположенные на опорах, и снабжен механизмом, обеспечивающим установки аппарата только на эти опоры.
10. Способ управления модульным многовинтовым беспилотным летательным аппаратом вертикального взлета и посадки путем определения параметров полета аппарата и подачи определенных команд на каждый двигатель, отличающийся тем, что после сборки полетной конфигурации аппарата полетный контроллер опрашивает установленные на нем консоли и принимает параметры каждой консоли: тягу, длину консоли, и вычисляет параметры конфигурации собранного аппарата.
11. Способ управления модульным многовинтовым беспилотным летательным аппаратом вертикального взлета и посадки по п. 10, отличающийся тем, что полетный контроллер опрашивает датчики веса, расположенные на опорах, и вычисляет массу и расположение центра масс аппарата.
12. Способ управления модульным многовинтовым беспилотным летательным аппаратом вертикального взлета и посадки по п. 10, отличающийся тем, что полетный контроллер с помощью датчика местоположения осей воздушных винтов определяет местоположение осей воздушных винтов в системе координат с началом в центре масс аппарата.
13. Способ управления модульным многовинтовым беспилотным летательным аппаратом вертикального взлета и посадки по п. 10, отличающийся тем, что аппарат взлетает на определенную безопасную высоту по предварительно установленным данным, затем полетный контроллер подает управляющие команды на каждую консоль, определяет передаточную функцию каждого двигателя и использует эти данные для дальнейшего управления полетом.
14. Способ управления модульным многовинтовым беспилотным летательным аппаратом вертикального взлета и посадки по п. 10, отличающийся тем, что определение передаточных функций приводов производится более одного раза за полет.
| УСТАНОВКА ДЛЯ ИЗГОТОВЛЕНИЯ ДВУСЛОЙНЫХ ПУСТОТЕЛЫХ ИЗДЕЛИЙ ИЗ ТЕРМОПЛАСТОВ | 0 |
|
SU179906A1 |
| Трансформируемый беспилотный летательный аппарат | 2018 |
|
RU2688506C1 |
| US 20090283629 A1, 19.11.2009 | |||
| US 20160311529 A1, 27.10.2016 | |||
| US 20180155021 A1, 07.06.2018. | |||

