Область техники, к которой относится настоящее изобретение
Настоящее изобретение относится к области пилотируемых и беспилотных летательных аппаратов и, в частности, к летательным аппаратам с несвязанными степенями свободы (DOF), образованными множеством мультикоптеров, соединенных с фюзеляжем, где функционирование множества мультикоптеров обеспечивает летательный аппарат с несвязанными DOF.
Предшествующий уровень техники настоящего изобретения
Беспилотный летательный аппарат (БПЛА) представляет собой летательный аппарат без человека-пилота. Пилотируемый летательный аппарат представляет собой летательный аппарат с пилотом-человеком, который по меньшей мере управляет некоторыми функциями летательного аппарата. Дроны могут быть пилотируемыми или беспилотными летательными аппаратами и могут управляться дистанционно с помощью пульта дистанционного управления с использованием, например, радиосигнала, или могут быть автономным дроном, задействующим бортовую компьютерную систему. Одним из примеров дронов является мультикоптер.
В контексте настоящего документа мультикоптеры могут относиться к любому летательному аппарату, пилотируемому или беспилотному, с дистанционным или автономным управлением, который летает с использованием любого количества силовых установок (например, воздушных винтов, несущих винтов, турбовинтовых двигателей, реактивных двигателей и т.д.), больше единицы. Примеры мультикоптеров включают, но не ограничиваются, бикоптеры (две силовые установки), трикоптеры (три силовые установки), квадрокоптеры (четыре силовые установки), гексакоптеры (шесть силовых установок), октокоптеры (восемь силовых установок) и другие. Движение мультикоптера может управляться за счет изменения относительной тяги, создаваемой каждой силовой установкой. В частности, можно управлять движением вокруг трех осей симметрии мультикоптера, известным как крен (поворот вокруг передней-задней оси), тангаж (поворот вокруг боковой оси) и рыскание (поворот вокруг вертикальной оси) путем изменения относительной тяги, создаваемой каждой силовой установкой. Например, крен и тангаж могут быть достигнуты путем увеличения тяги в силовых установках, расположенных на одной стороне, и уменьшения тяги в силовых установках, расположенных на другой стороне, в то время как рыскание может быть достигнуто за счет увеличения тяги в силовых установках, расположенных по диагонали друг от друга. Горизонтальное движение может быть достигнуто за счет наклона мультикоптера в намеченном направлении движения, а вертикальное движение достигается за счет одновременного увеличения тяги в каждой силовой установке (подъем) или одновременного уменьшения тяги в каждой силовой установке (спуск).
Использование мультикоптеров становится все более популярным за последние несколько лет, и по мере того, как технология становится высокоразвитой, появляются новые применения для мультикоптеров. Например, использование мультикоптеров для перевозки крупногабаритных предметов или людей вот некоторые применения, которые начинают рассматриваться.
Однако применение существующих архитектур мультикоптеров к новым областям применения приводит к новым проблемам, которые еще не решены. Одна из этих проблем заключается в том, что существующие мультикоптеры с неподвижными силовыми установками не характеризуются всеми своими DOF, являющимися несвязанными (движения в плоскостях X, Y и Z, рыскание, крен и тангаж не являются несвязанными), поэтому указанные мультикоптеры не могут выполнять определенные движения без значительного увеличения количества силовых установок, которые они включают, и, следовательно, массы и сложности мультикоптера.
Наличие летательного аппарата с несвязанными DOF, другими словами, с независимыми друг от друга DOF, предоставляет как минимум два основных преимущества. Первое преимущество заключается в том, что повышается эффективность летательного аппарата. Имея возможность перемещаться с DOF, которые являются несвязанными, можно избежать промежуточных движений, которые не нужны для перемещения летательного аппарата из первой точки во вторую, и, таким образом, экономится энергия. Кроме того, большая эффективность в полете достигнута за счет возможности направлять летательный аппарат в направлении с незначительными потерями энергии, стремясь максимизировать аэродинамическую эффективность. Второе преимущество заключается в том, что повышается точность движения, а также управляемость, маневренность и устойчивость летательного аппарата. Повышение точности движения позволяет летательному аппарату с независимыми DOF выполнять задачи, например, точную транспортировку чувствительных грузов, точное приземление и т.д., которые существующие мультикоптеры с взаимозависимыми DOF выполнять не могут. Это также позволяет обеспечить летательному аппарату расширенную маневренность, которая может иметь решающее значение в миссиях, где условия полета меняются (порывистый ветер, переменная или подвижная полезная нагрузка) или где такая расширенная маневренность необходима для определенных маневров или сложной и очень требовательной динамики полета.
С целью создания летательных аппаратов с независимыми DOF некоторые существующие мультикоптеры имеют несущие винты, соединенные с их корпусами посредством сервоприводов, позволяющих наклонять силовые установки относительно корпусов. Однако использование сервоприводов для точного управления углом наклона силовых установок увеличивает сложность конструкции, увеличивает массу мультикоптеров, увеличивает затраты на производство и обслуживание и снижает безопасность и надежность.
Раскрытие настоящего изобретения
Для преодоления упомянутых недостатков настоящее изобретение раскрывает летательный аппарат с несвязанными степенями свободы и способ управления летательным аппаратом.
Летательный аппарат может содержать несущую раму и множество управляемых мультикоптерных блоков. Каждый управляемый мультикоптерный блок из множества управляемых мультикоптерных блоков может характеризоваться наличием множества силовых установок, которые прикреплены к нему с постоянным углом рыскания, постоянным углом крена и постоянным углом тангажа, другими словами, силовые установки могут быть прикреплены к корпусу мультикоптера. Тяга, прилагаемая каждой из силовых установок, может отличаться друг от друга. Таким образом, множество силовых установок мультикоптерного блока может быть выполнено с возможностью приложения общего направления тяги, но разной величины тяги. Примеры силовых установок могут включать, но не ограничиваются ими, воздушные винты, несущие винты, турбовинтовые двигатели, реактивные двигатели и т.д. Множество управляемых мультикоптерных блоков могут быть прикреплены к несущей раме через соответствующие шарниры и могут поворачиваться относительно несущей рамы независимо друг от друга. По меньшей мере один из этих шарниров может иметь как минимум одну DOF, так что несущая рама, то есть летательный аппарат, имеет количество управляемых степеней свободы (CDOF), равное или превышающее общее количество DOF несущей рамы. Предпочтительно шарниры могут иметь число DOF от одного до трех, хотя в некоторых реализациях некоторые из шарниров могут быть неподвижными.
В контексте настоящего документа CDOF могут относиться к максимальному количеству переменных управления направлением, которыми можно управлять одновременно во время полета летательного аппарата.
В трехмерном пространстве максимальное число DOF твердого тела равно шести. Хотя твердое тело может иметь конфигурации с числом DOF меньше шести, твердые тела, имеющие общее число несвязанных DOF, равное шести, обеспечивает максимально возможный контроль. Следовательно, количество переменных управления направлением, которыми можно одновременно управлять в описанном в настоящем документе летательном аппарате с несвязанными DOF, может быть равно или больше шести DOF несущей рамы (и, следовательно, всего летательного аппарата в целом). Шесть DOF несущей рамы это продольные движения в направлениях X, Y и Z, а также поворотные движения по рысканию, крену и тангажу. Тогда будет такое же или большее число CDOF несущей рамы (и, следовательно, летательного аппарата), чем общее число DOF твердого тела, которое нужно переместить (летательный аппарат). Таким образом, каждая DOF летательного аппарата может быть перемещена независимо.
В зависимости от архитектуры летательного аппарата (количество мультикоптерных блоков, количество силовых установок в каждом мультикоптерном блоке и число DOF шарниров) летательный аппарат может иметь больше или меньше CDOF. Летательный аппарат имеет голономную архитектуру, когда число CDOF равно общему числу DOF твердого тела, и резервированную архитектуру, когда число CDOF больше, чем общее число DOF твердого тела. В указанных резервированных архитектурах резервные CDOF, то есть те дополнительные CDOF свыше общего числа DOF твердого тела, можно изменять без изменения каких-либо других CDOF летательного аппарата. Резервные CDOF повышают безопасность, обеспечивают безопасные режимы отказа, обеспечивают режимы работы, недоступные обычным дронам, и т.д.
Дополнительные CDOF летательного аппарата, описанного в настоящем документе (по сравнению с обычным дроном только с 4 CDOF для генерации в общей сложности шести степеней свободы DOF в его основной конструкции), позволяют управлять разными заданными величинами (разными углами наклона и тягами) для каждого из мультикоптерных блоков, развивая динамические режимы работы, которые в настоящее время недоступны в существующих дронах, такие как формы устойчивого движения, в которых модули размещены под определенным углом наклона, а противодействующие силы придают летательному аппарату устойчивость к порывам ветра, или режимы, в которых скоординированное движение всех модулей приводит к перемещению по X или Y без изменения других DOF. Это также позволяет иметь необходимое резервирование, так что даже в случае отказа некоторых силовых установок летательный аппарат может поддерживать минимум шесть CDOF для генерации шести DOF в своей основной конструкции.
Например, для архитектур летательного аппарата с центром тяжести, симметрично расположенным относительно сил, создаваемых мультикоптерными блоками, основные режимы движения вперед, назад, влево и вправо могут быть вызваны простым наращиванием одних и тех же сил в каждом из мультикоптерных блоков, поскольку каждый мультикоптерный блок будет располагаться под одним и тем же углом наклона с одной и той же прилагаемой силой тяги. Летательный аппарат будет двигаться в зависимости от создаваемой тяги и угла наклона, с которыми функционируют мультикоптерные блоки.
Согласно некоторым примерам все мультикоптерные блоки могут быть прикреплены к несущей раме через один шарнир по меньшей мере с одной DOF. Однако согласно некоторым другим примерам некоторые мультикоптерные блоки из множества мультикоптерных блоков могут быть прикреплены к несущей раме, то есть через шарниры без DOF относительно несущей рамы. Согласно некоторым другим примерам число DOF каждого шарнира из множества шарниров в летательном аппарате может отличаться друг от друга.
Согласно некоторым примерам шарниры могут иметь максимум три DOF. Например, шарниры с тремя DOF могут быть сферическими шарнирами. Указанные сферические шарниры, соединяющие каждый мультикоптерный блок с несущей рамой, могут обеспечивать до 3 вращательных степеней свободы (поворот по оси X, поворот по оси Y и поворот по оси Z) и позволяют точно позиционировать каждый из модулей относительно несущей рамы, позволяя летательному аппарату выполнять движения, которые в настоящее время не могут быть выполнены существующими дронами (например, движение по оси X без изменения крена и тангажа или другие точные маневры).
Согласно некоторым примерам несущая рама может иметь множество плеч, отходящих от нее радиально, и каждый управляемый мультикоптерный блок может быть прикреплен к соответствующему плечу множества плеч. Таким образом, шарниры могут быть расположены вблизи свободных концов плеч, так что мультикоптерные блоки соединены с рамой через соответствующие свободные концы плеч.
Согласно некоторым примерам шарниры могут содержать систему быстрого разъединения, так что множество управляемых мультикоптерных блоков разъемно прикреплены к несущей раме. Например, шарниры могут иметь верхнюю часть, прикрепленную к мультикоптерному блоку, нижнюю часть, прикрепленную к несущей раме, так что система быстрого разъединения может позволять отсоединять верхнюю часть шарнира от нижней части шарнира. Наличие мультикоптерных блоков, разъемно прикрепленных к несущей раме, облегчает операции по техническому обслуживанию летательного аппарата и обеспечивает масштабируемость летательного аппарата, поскольку используемые в настоящее время мультикоптерные блоки могут быть легко и быстро заменены другими мультикоптерными блоками.
Согласно некоторым примерам шарниры могут содержать стопорные механизмы, выполненные с возможностью ограничения движения шарниров по меньшей мере в одной DOF. Указанные шарниры с ограниченными DOF могут быть полезны для конкретных применений, где не требуется разъединение всех DOF, или где нет необходимости в определенной DOF.
Согласно некоторым примерам шарниры могут содержать блокирующие механизмы, выполненные с возможностью временного блокирования движения шарниров по меньшей мере в одной DOF. Эти шарниры с временно заблокированными DOF могут быть полезны в крейсерских режимах, когда предпочтительно гарантировать, что шарнир сохраняет свое положение независимо от внешних помех.
Согласно некоторым примерам шарниры могут содержать амортизирующий механизм, выполненный с возможностью поглощения ударных импульсов, генерируемых движением мультикоптерного блока относительно несущей рамы. Указанные шарниры с амортизирующими средствами могут улучшить стабильность и точность.
Согласно некоторым примерам шарниры, которые могут перемещать угловую DOF независимо друг от друга без изменения своего положения по осям X, Y и Z, могут быть выбраны из группы, состоящей из сферических шарниров, карданных шарниров, шаровых шарниров, шарниров постоянной угловой скорости и любых их комбинаций. Кроме того, шарниры могут быть комбинацией шарниров с менее чем тремя DOF, чтобы обеспечить комбинированный шарнир тремя DOF. Например, шарнир может представлять собой комбинацию двух или трех последовательных цилиндрических шарниров для обеспечения двух или трех DOF соответственно.
Согласно некоторым примерам множество управляемых мультикоптерных блоков расположены на равном расстоянии относительно центральной точки несущей рамы. Таким образом достигается максимальная устойчивость летательного аппарата. Согласно некоторым другим примерам и в зависимости от назначения и конкретной архитектуры летательного аппарата мультикоптерные блоки могут быть прикреплены к несущей раме с различным распределением.
Согласно некоторым примерам летательный аппарат может содержать блок обработки исходных данных, расположенный на несущей раме. Указанный блок обработки исходных данных может быть дополнительно сконфигурирован для определения смещения несущей рамы относительно горизонтальной плоскости. Предпочтительно блок обработки исходных данных может быть соединен с возможностью связи с инерциальным измерительным блоком и множеством акселерометров и/или гироскопов, расположенных на несущей раме. Ориентация несущей рамы обеспечивает возможность точного контроля полета летательного аппарата, поскольку наклон относительно горизонтальной плоскости может обеспечить направленную тягу летательного аппарата, а также позволяет адаптировать полет к условиям окружающей среды.
Согласно некоторым примерам летательный аппарат может содержать контроллер, расположенный в несущей раме и выполненный с возможностью управления множеством мультикоптерных блоков. Указанный контроллер может быть соединен с возможностью связи с блоком обработки исходных данных для получения информации об ориентации несущей рамы и текущем направлении движения. Таким образом, контроллер с информацией о текущей ориентации, текущем направлении движения и предполагаемом направлении движения летательного аппарата может управлять мультикоптерными блоками для изменения направления движения летательного аппарата в заданное направление движения. Для этого контроллер управляет мультикоптерными блоками, изменяя тяги силовых установок каждого мультикоптерного блока, что изменяет ориентацию мультикоптерных блоков относительно несущей рамы через шарниры и, таким образом, изменяет направление движения летательного аппарата.
Предпочтительно контроллер может включать блок измерения расхода воздуха для определения данных о воздушном потоке в поперечном направлении летательного аппарата. Эти информационные данные о воздушном потоке могут использоваться контроллером для определения операций, которые должны выполняться над мультикоптерными блоками.
Согласно некоторым другим примерам летательный аппарат может содержать основной контроллер, расположенный в несущей раме, и множество вторичных контроллеров, каждый вторичный контроллер расположен в соответствующем мультикоптерном блоке. Множество вторичных контроллеров может быть выполнено с возможностью управления соответствующими мультикоптерными блоками, а основной контроллер может быть выполнен с возможностью управления множеством вторичных контроллеров. Указанный основной контроллер может быть соединен с возможностью связи с блоком обработки исходных данных для приема информации об ориентации несущей рамы. Вторичные контроллеры могут быть соединены с возможностью связи с основным контроллером. Таким образом, основной контроллер с информацией о текущей ориентации, текущем направлении движения и предполагаемом направлении движения летательного аппарата может определять направление, которое будет принимать летательный аппарат. Основной контроллер может передавать направление, которое должен принимать летательный аппарат, вторичным контроллерам, так что каждый вторичный контроллер может управлять соответствующим мультикоптерный блоком, чтобы направлять летательный аппарат в нужном направлении. Например, каждый вторичный контроллер может изменять тягу силовых установок соответствующего мультикоптерного блока, изменяя ориентацию мультикоптерного блока относительно несущей рамы через соответствующий шарнир и, таким образом, изменяя направление движения летательного аппарата.
Согласно некоторым примерам описан способ управления летательным аппаратом, описанным ранее. Способ может включать определение с помощью блока обработки исходных данных смещения летательного элемента относительно горизонтальной плоскости. Затем контроллер может определить заданное значение или вектор тяги, то есть величину тяги и угол наклона (углы рыскания, крена и тангажа) для летательного аппарата на основе определенного смещения. Контроллер может регулировать тягу каждого мультикоптерного блока на основе определенной тяги. Контроллер может дополнительно регулировать угол наклона, то есть рыскание, крен и тангаж, множества мультикоптерных блоков, выполняя поворотное движение каждого мультикоптерного блока относительно несущей рамы через соответствующие шарниры, причем относительное поворотное движение основано на угле наклона, определенном для летательного аппарата. Сумма векторов тяги во множестве мультикоптерных блоков будет равна рассчитанному вектору тяги летательного аппарата для выполнения определенного маневра. В этом примере представлено централизованное управление летательным аппаратом.
Согласно некоторым примерам летательный аппарат может характеризоваться наличием основного контроллера, прикрепленного к несущей раме, и вторичного контроллера, прикрепленного к каждому мультикоптерному блоку. Множество вторичных контроллеров может управлять соответствующими мультикоптерными блоками, а основной контроллер может управлять множеством вторичных контроллеров. После определения смещения летательного аппарата основной контроллер может определить тягу и угол наклона летательного аппарата на основании определенного смещения. Каждый из вторичных контроллеров после получения данных о тяге и угле наклона летательного аппарата от основного контроллера может определять и регулировать конкретную тягу мультикоптерного блока, на котором установлен вторичный контроллер, на основе тяги, определенной ранее для летательного аппарата. Каждый вторичный контроллер может дополнительно определять и регулировать угол наклона соответствующего мультикоптерного блока посредством осуществления поворотного движения мультикоптерного блока относительно несущей рамы через шарниры, причем относительное поворотное движение основано на угле наклона, предварительно определенном для летательного аппарата. Сумма векторов тяги множества мультикоптерных блоков будет равна расчетному вектору тяги летательного аппарата для выполнения определенного маневра. В этом примере представлено децентрализованное управление летательным аппаратом.
Согласно некоторым примерам летательный аппарат может иметь множество контроллеров, выполненных с возможностью управления любым из множества мультикоптерных блоков. Затем один из контроллеров может определять и устанавливать заданные значения, то есть тягу и угол наклона, для летательного аппарата на основе заранее определенного смещения. После этого любой из множества контроллеров, тот же самый контроллер, который определил заданные значения для летательного аппарата, или любой другой контроллер в летательном аппарате, может определять и регулировать тягу множества мультикоптерных блоков на основе тяги летательного аппарата. Один из множества контроллеров может дополнительно определять и регулировать угол наклона множества мультикоптерных блоков посредством выполнения поворотного движения мультикоптерных блоков относительно несущей рамы через шарниры, причем относительное поворотное движение основано на определенном угле наклона. Сумма векторов тяги множества мультикоптерных блоков будет равна вектору тяги летательного аппарата. Этот пример обеспечивает распределенное управление летательным аппаратом, в котором любой из множества контроллеров может взять на себя управление летательным аппаратом в случае отказа контроллера, в настоящее время отвечающего за управление летательным аппаратом. Такое резервирование управления повышает безопасность и надежность летательного аппарата.
В нижеследующем описании в целях объяснения изложены многочисленные конкретные детали, чтобы обеспечить полное понимание настоящих систем и способов. Однако для специалиста в данной области техники будет очевидно, что настоящее устройство, системы и способы могут применяться на практике без этих конкретных деталей. Ссылка в описании на «пример» или аналогичный термин означает, что конкретная функция, структура или характеристика, описанная в связи с этим примером, включена, как это описано, но не может быть включена в другие примеры.
Краткое описание фигур
Для завершения описания и для лучшего понимания изобретения предоставляется набор чертежей. Указанные чертежи составляют неотъемлемую часть описания и иллюстрируют варианты осуществления настоящего изобретения, которые не следует интерпретировать как ограничение объема изобретения, а просто как пример того, как изобретение может быть реализовано. Чертежи включают следующие фигуры:
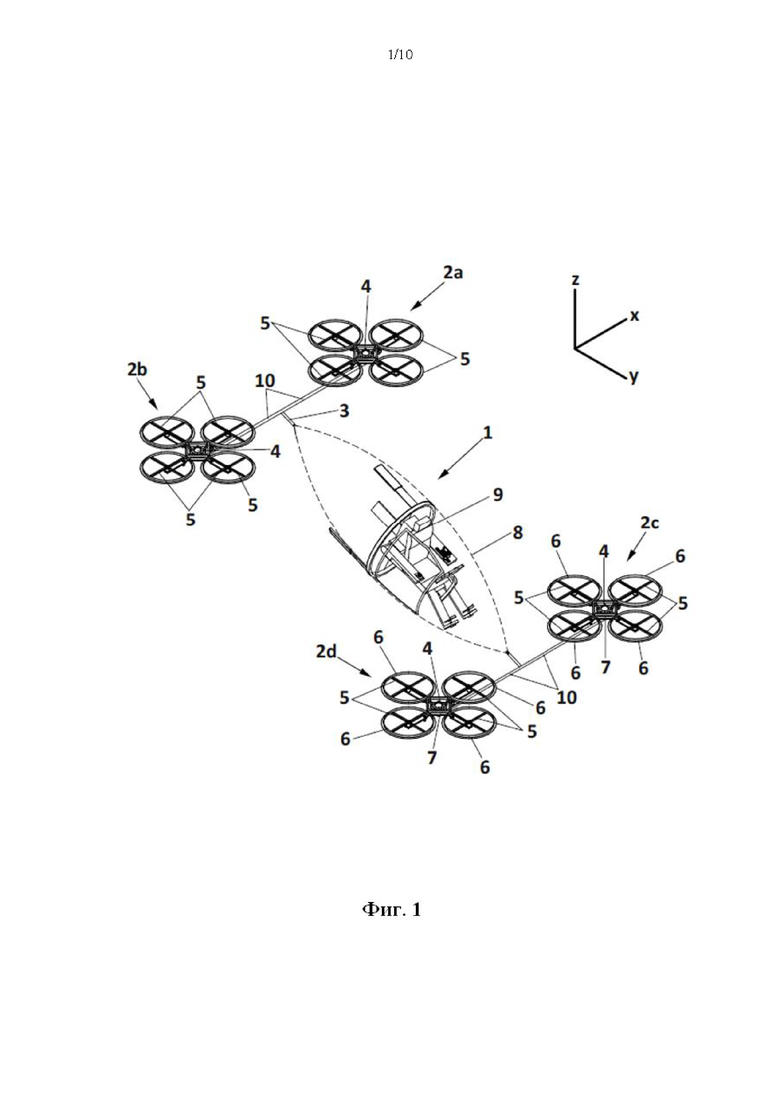
на фиг. 1 показан пример летательного аппарата с несвязанными DOF с четырьмя квадрокоптерами, прикрепленными к несущей раме через соответствующие шарниры.
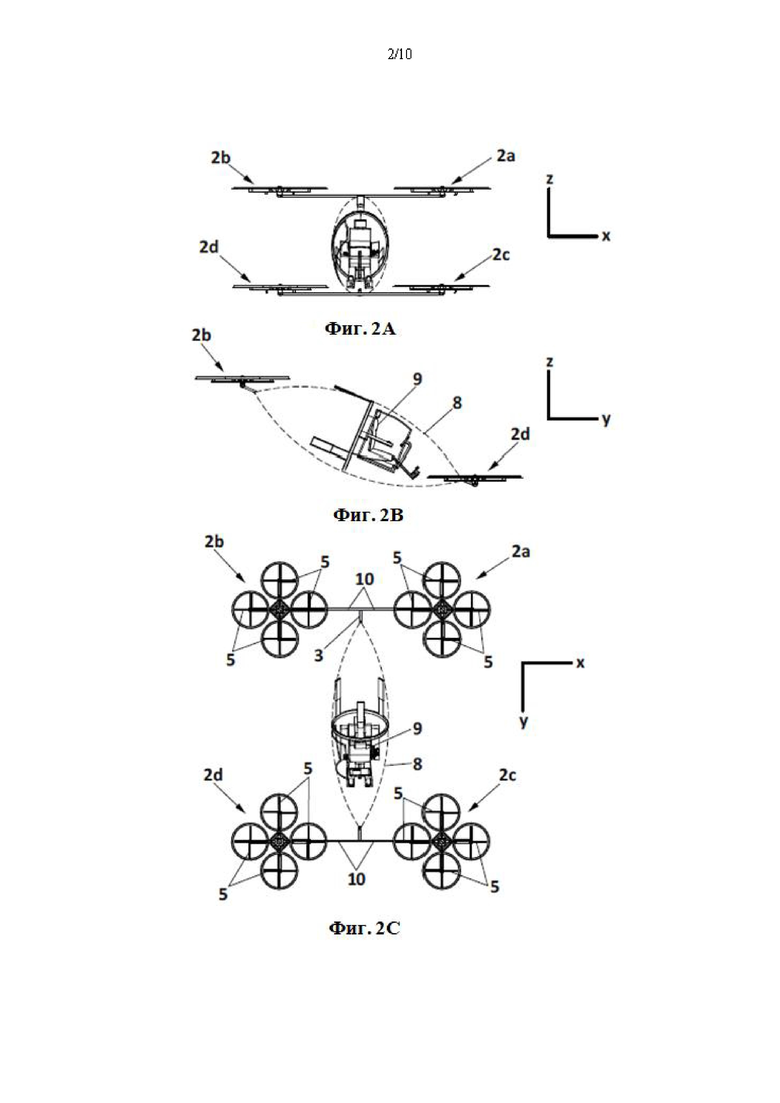
На фиг. 2А-С показаны вид спереди, вид сбоку и вид сверху примера летательного аппарата на фиг.1, соответственно, с четырьмя квадрокоптерами, установленными и управляемыми так, чтобы летательный аппарат зависал.
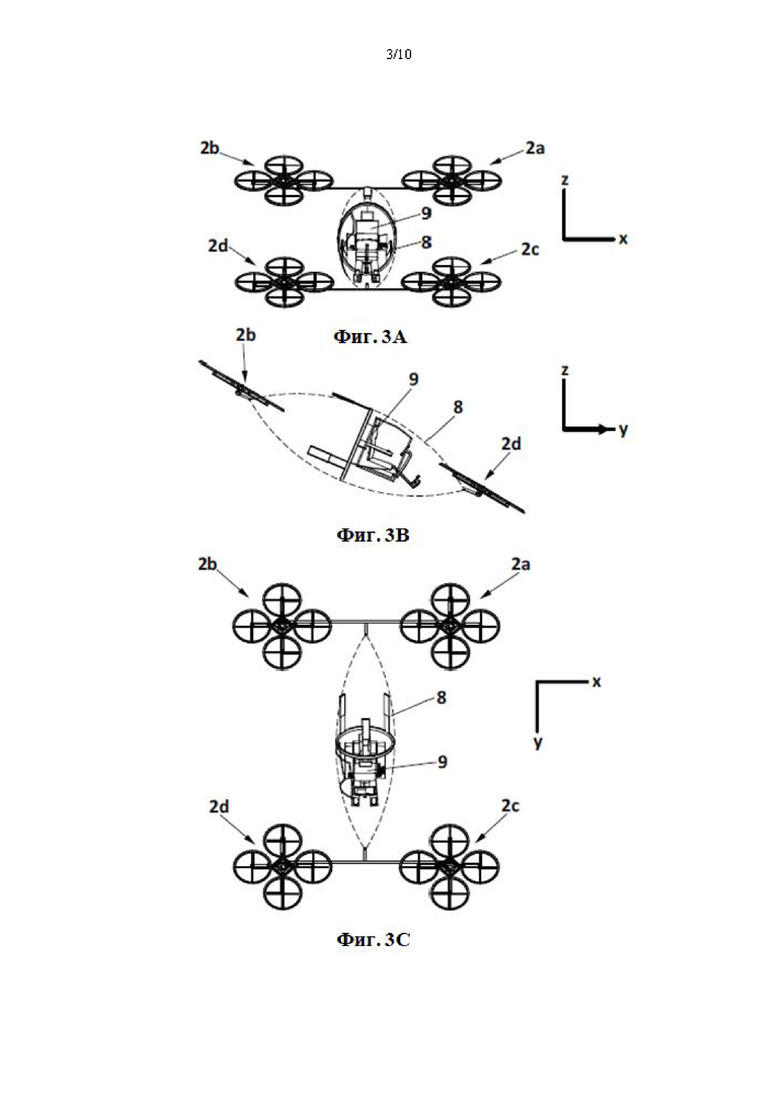
На фиг. 3А-С показаны вид спереди, вид сбоку и вид сверху примера летательного аппарата на фиг.1, соответственно, с четырьмя квадрокоптерами, расположенными и управляемыми так, чтобы летательный аппарат двигался в крейсерском режиме.
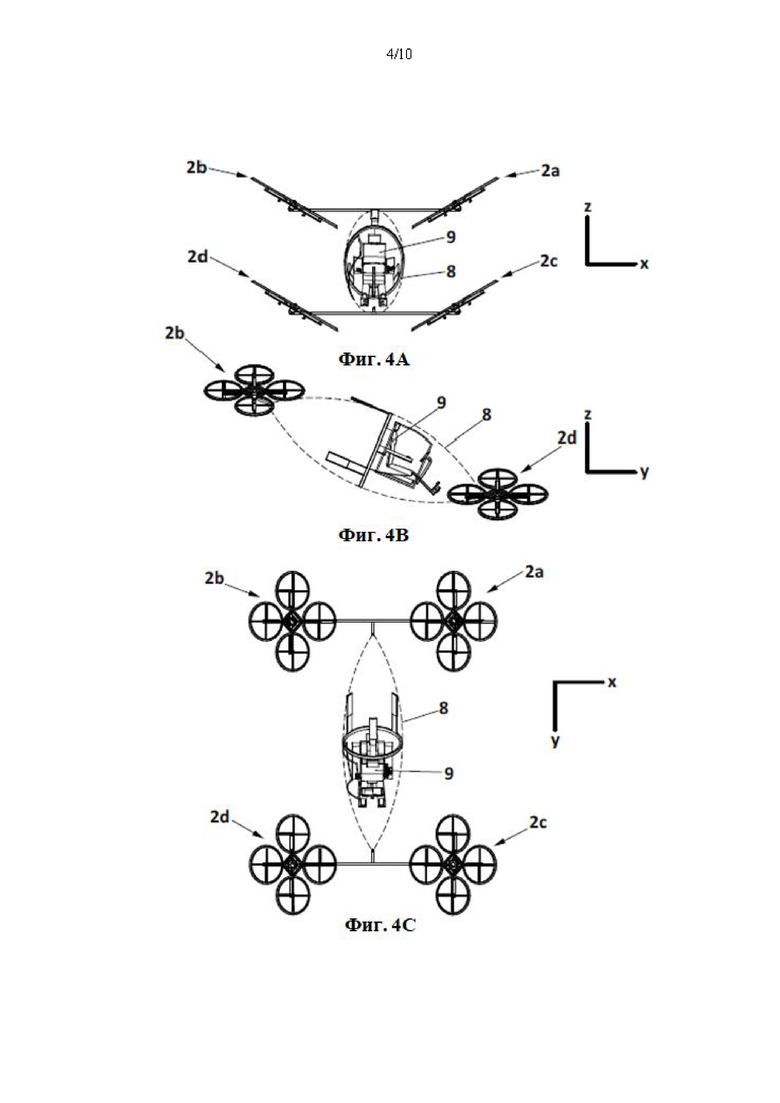
На фиг. 4А-С показаны вид спереди, вид сбоку и вид сверху примера летательного аппарата на фиг. 1, соответственно, с четырьмя квадрокоптерами, расположенными и управляемыми так, чтобы летательный аппарат зависал с потоком, нисходящим по направлению к его наружной части в режиме устойчивого движения.
На фиг. 5А-С показаны вид спереди, вид сбоку и вид сверху примера летательного аппарата на фиг. 1, соответственно, с четырьмя квадрокоптерами, расположенными и управляемыми так, чтобы вызвать движение вправо летательного аппарата с разной тягой в его несущих винтах.
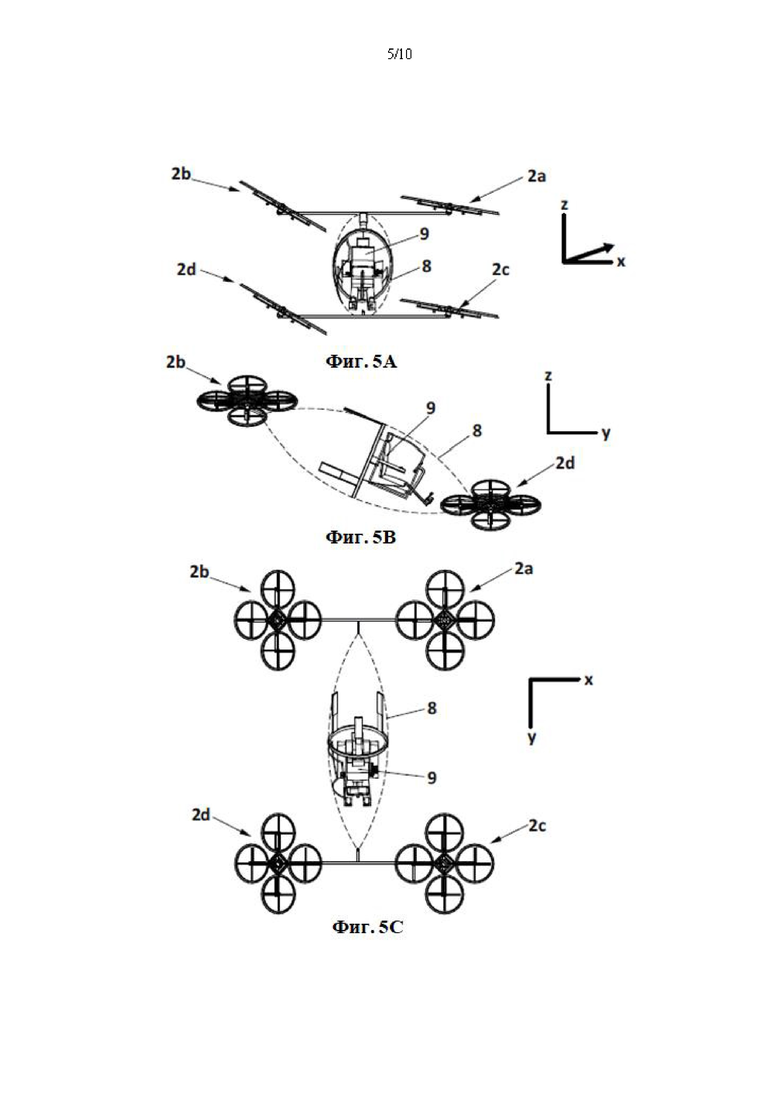
На фиг. 6А показан детализированный вид одного из квадрокоптеров фиг. 1 с указанным квадрокоптером, отталкивающимся от плеча летательного аппарата (устойчивое равновесие). На фиг. 6FJ показан детализированный вид одного из квадрокоптеров на фиг. 1 с указанным квадрокоптером, толкающим плечо летательного аппарата (неустойчивое равновесие).
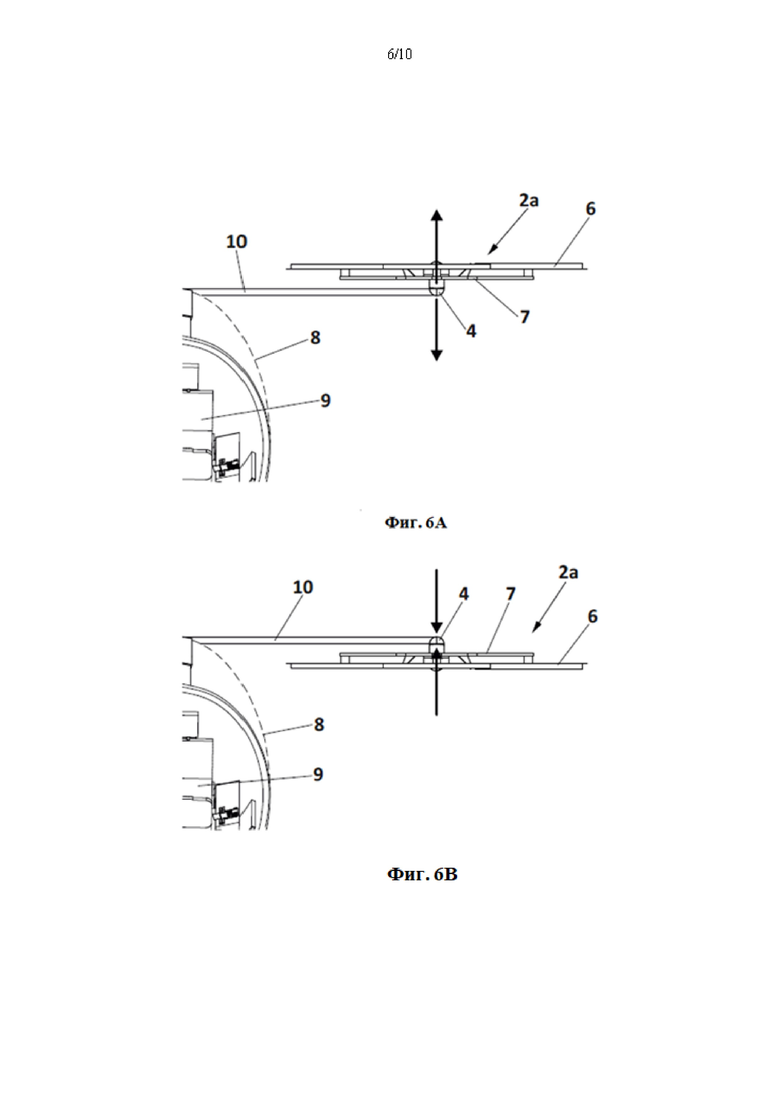
На фиг. 7 показаны схематические изображения сверху различных примеров летательного аппарата с несвязанными DOF.
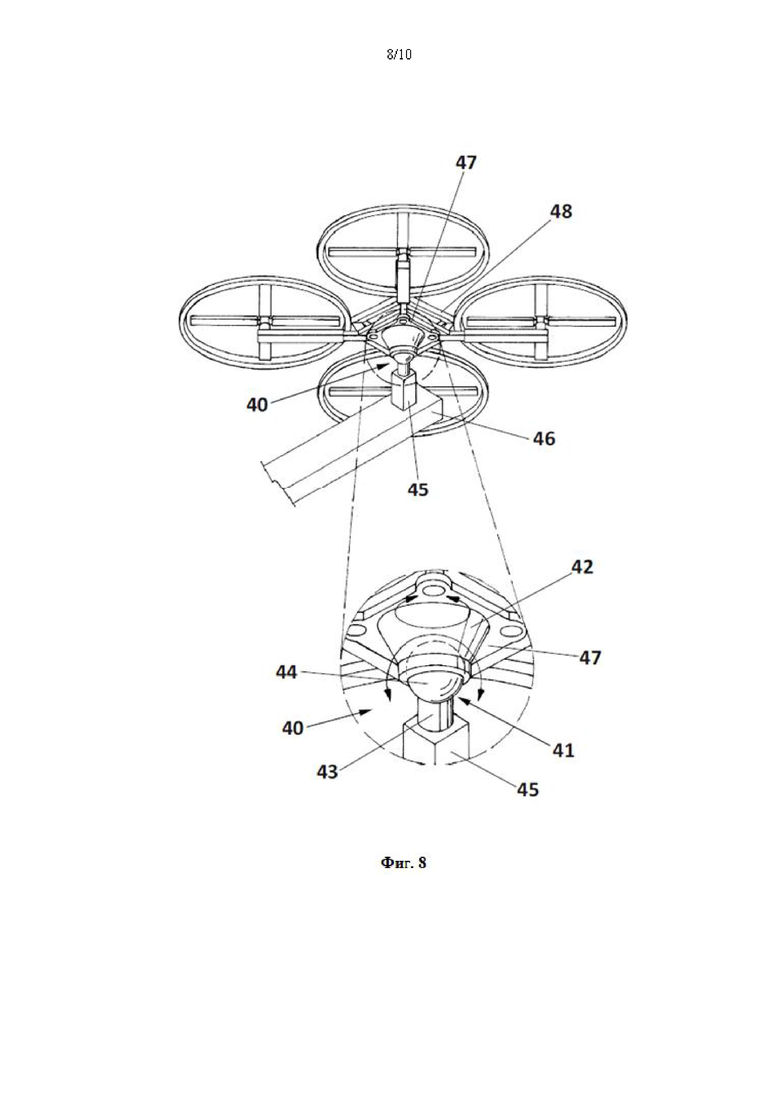
На фиг. 8 показан пример узла сферического шарнира для прикрепления конкретного квадрокоптера к плечу несущей рамы в примере летательного аппарата с несвязанными DOF.
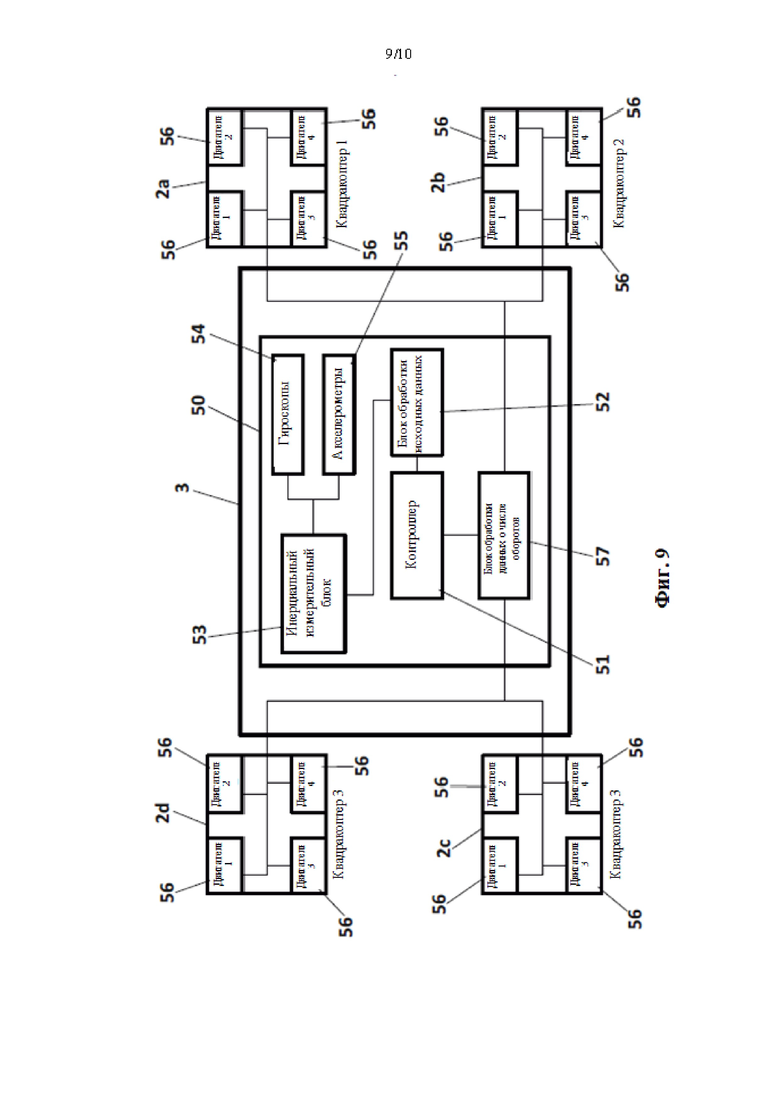
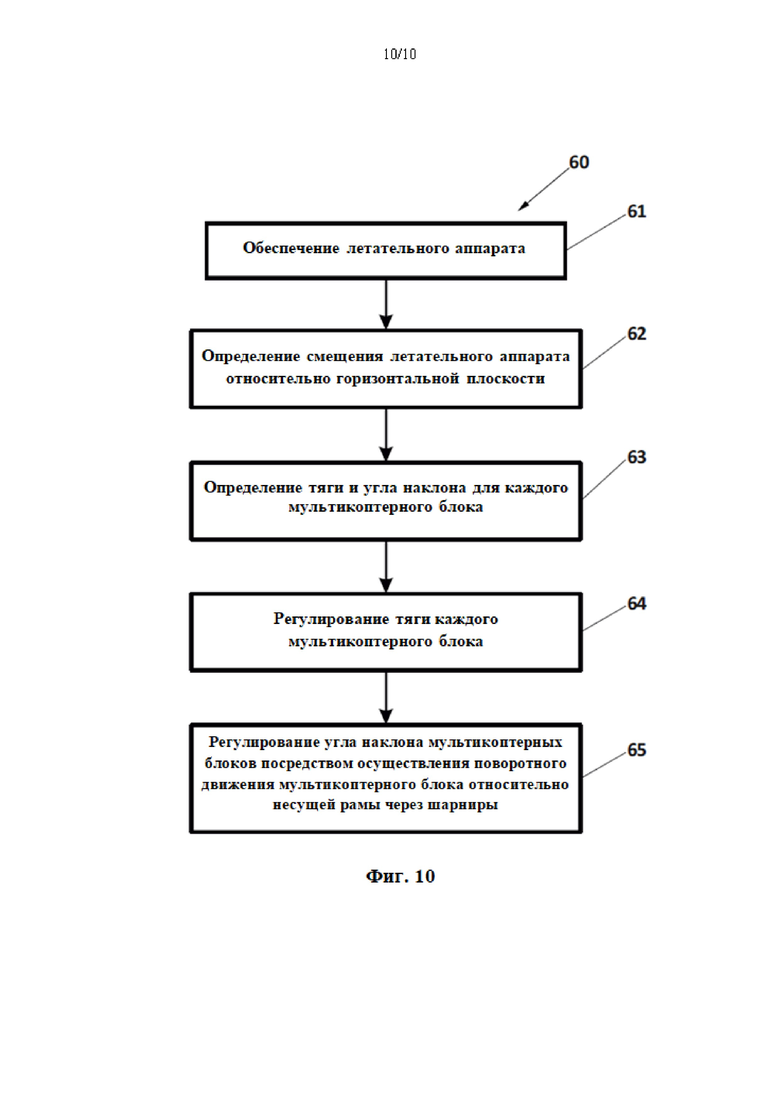
На фиг. 9 показан пример системы управления летательным аппаратом на фиг. 1. На фиг. 10 показана блок-схема примерного способа управления летательным аппаратом с несвязанными DOF.
Подробное раскрытие принципа работы варианта осуществления настоящего изобретения
На фиг. 1 проиллюстрирован пример летательного аппарата 1 с несвязанными DOF с четырьмя квадрокоптерами 2a-d, прикрепленными к удлиненной несущей раме 3 через шарниры 4, например, шаровые шарниры, имеющие три DOF. Следует понимать, что пример летательного аппарата 1 может включать в себя дополнительные элементы и что некоторые из элементов, описанных в настоящем документе, могут быть удалены и/или изменены без отклонения от объема примера летательного аппарата 1. Кроме того, реализация примера летательного аппарата 1 не ограничивается таким примером, как показано на фиг.1.
Квадрокоптеры 2a-d прикреплены к несущей раме 3 через шарниры 4, обеспечивающие несущей раме 3 шесть несвязанных DOF. В частности, несущая рама 3 имеет шесть DOF, и каждый из шаровых шарниров 4 обеспечивает три дополнительных CDOF, так что несущая рама 3 имеет шестнадцать CDOF. Каждый из квадрокоптеров 2a-d имеет четыре зафиксированных силовых установки 5, например, лопасти несущего винта, прикрепленные к соответствующему корпусу 6 несущего винта в основном корпусе 7 квадрокоптера 2a-d.
Указанные управляемые лопасти 5 несущего винта обеспечивают летательный аппарат 1 функциональными возможностями летательного аппарата. В частности, лопасти 5 несущего винта должны обеспечивать подъемную силу во время вертикального маневрирования летательного аппарата 1 и направленную тягу для горизонтальных перемещений. Согласно некоторым примерам летательный аппарат 1 может содержать пару лопастей 5 несущего винта внутри корпуса 6 несущего винта, предусмотренных как верхняя и нижняя лопасти несущего винта для точного регулирования тяги.
Каждый квадрокоптер 2a-d, помимо лопастей 5 несущего винта, дополнительно содержит двигатель (не показан), например бесщеточный двигатель, связанный с лопастью 5 несущего винта, и блок обработки данных о числе оборотов (не показан) для передачи сигналов двигателям в квадрокоптерах 2a-d, которые определяют скорость вращения. В качестве альтернативы квадрокоптеры 2a-d могут содержать блок обработки данных о крутящем моменте вместо блока обработки данных о числе оборотов для передачи сигналов двигателям, определяющих скорость вращения. В любой момент каждый из двигателей в конкретном квадрокоптере 2 и, следовательно, соответствующие лопасти 5 несущего винта могут вращаться с разной скоростью, чтобы обеспечить разную тягу. В качестве альтернативы, несущая рама 3 может содержать централизованный блок обработки данных о числе оборотов, который связан с каждым из двигателей квадрокоптеров 2a-d. Такие схемы обеспечивают отличную тягу двигателя, тем самым достигая максимально возможной подъемной силы для летательного аппарата 1. Хотя на фиг.1 квадрокоптеры 2a-d содержат лопасти 5 несущего винта для обеспечения функциональных возможностей летательного аппарата, могут быть предусмотрены альтернативные силовые установки, например, при использовании воздушных винтов, турбовинтовых двигателей или управляемых реактивных двигателей.
Летательный аппарат 1 также содержит по меньшей мере один контроллер (не показан) для управления квадрокоптерами 2 в зависимости от предполагаемого направления движения. Указанный по меньшей мере один контроллер управляет через блок обработки данных о числе оборотов лопастями 5 несущего винта, изменяя их относительную скорость, так что положение каждого квадрокоптера 2 относительно несущей рамы 3 может быть независимо изменено, и, следовательно, вектор тяги, создаваемой каждым квадрокоптером. Таким образом, по меньшей мере один контроллер выполнен с возможностью определения относительного положения каждого из квадрокоптеров 2 независимо от относительного положения остальных квадрокоптеров 2 и несущей рамы 3 в летательном аппарате 1. Таким образом, по меньшей мере один контроллер может определять различные заданные величины (углы тяги и наклона, крен, тангаж и рыскание) для каждого квадрокоптера 2, обеспечивая летательный аппарат 1 дополнительными режимами работы, отличными от основных режимов работы (эти основные режимы работы - это движения, выполняемые летательным аппаратом, имеющим общие заданные величины для всех его мультикоптерных блоков). Примерами этих дополнительных режимов работы являются режимы устойчивого движения, в которых мультикоптеры находятся с обратным углом установки несущего винта таким образом, что силы, создаваемые мультикоптерами, противодействуют друг другу, повышая устойчивость летательного аппарата, режимы точности за счет повышенной маневренности летательного аппарата с несвязанными DOF или оптимальные крейсерские режимы, в которых мультикоптерные блоки могут находиться в крейсерском положении, но в то же время поддерживать капсулу в положении, которое минимизирует аэродинамическое сопротивление.
Летательный аппарат также характеризуется наличием корпуса 8 планера, прикрепленного к несущей раме 3. В таком примере корпус 8 планера представляет собой капсулу для перевозки пользователя или пассажира, поэтому капсула 8 включает в себя сиденье 9 для пользователя. Несущая рама 3 характеризуется наличием четырех плеч 10, расположенных попарно на обоих концах несущей рамы 3. Каждое из этих плеч 10 имеет рядом со своими свободными концами соответствующий шаровой шарнир 4 для прикрепления соответствующего квадрокоптера 2 к несущей раме 3. Согласно некоторым примерам и в зависимости от геометрии несущей рамы 3 плечи 10 могут проходить от центра летательного аппарата 1 до радиальных точек несущей рамы 3.
Несущая рама 3 и корпус 8 планера могут быть разъемно соединены или могут быть выполнены как единое целое друг с другом. Корпус 8 планера может также содержать конструкцию для размещения других элементов, таких как батареи, различные виды полезной нагрузки и т.д.
Хотя на фиг.1 показан летательный аппарат 1, образованный четырьмя квадрокоптерами 2, очевидно, что любая другая подходящая архитектура летательного аппарата, включая любое количество мультикоптерных блоков, размещенных на несущей раме, и любое количество силовых установок, размещенных на каждом мультикоптерном блоке, может использоваться для обеспечения функциональности мультикоптера для летательного аппарата 1. Кроме того, хотя на фиг. 1 показаны четыре квадрокоптера 2, соединенные с несущей рамой 3 посредством шаровых шарниров 4, могут использоваться другие типы шарниров с от одной до трех DOF. Кроме того, шарниры могут отличаться друг от друга и иметь разное количество DOF. Согласно некоторым реализациям некоторые шарниры могут быть неразъемными.
На фиг. 2А-С показаны вид спереди, вид сбоку и вид сверху примера летательного аппарата на фиг. 1, соответственно, с четырьмя квадрокоптерами, расположенными и управляемыми так, чтобы летательный аппарат зависал.
Согласно такому примеру четыре квадрокоптера 2a-d расположены относительно несущей рамы 3 и управляются так, чтобы вызвать зависание летательного аппарата 1, то есть нахождение в одинаковом положении во время полета. В таком примере квадрокоптеры 2а и 2b расположены в первой общей плоскости, в то время как квадрокоптеры 2с и 2d расположены во второй общей плоскости, отличной от первой плоскости. Как более подробно показано на фиг.2 В, обе плоскости являются по существу горизонтальными плоскостями, параллельными друг другу, а расстояние между обеими плоскостями таково, что капсула 8 и, следовательно, сиденье 9 расположены по существу в вертикальном положении для пассажира. Квадрокоптеры 2а и 2b создают первый вектор тяги (величина тяги и угол наклона, то есть углы рыскания, крена и тангажа), а квадрокоптеры 2с и 2d создают второй вектор тяги, причем величина первой тяги отличается от величины второй тяги, а сумма векторов тяги, создаваемых четырьмя квадрокоптерами 2a-d, является вектором тяги, необходимым для поддержания летательного аппарата 1 в равновесии и сохранения одинакового положения для пассажира. Согласно такому примеру центр тяжести сосредоточен на летательном аппарате 1, а значит тяга чисто вертикальная. Такое положение квадрокоптеров 2a-2d относительно друг друга также можно использовать для операций подъема, когда тяга несущего винта увеличивается с одинаковой величиной во всех несущих винтах 5 летательного аппарата 1, и для операций спуска, когда тяга несущего винта уменьшается с одинаковой величиной во всех несущих винтах 5 летательного аппарата 1.
На фиг. 3А-С показаны вид спереди, вид сбоку и вид сверху примера летательного аппарата на фиг.1, соответственно, с четырьмя квадрокоптерами, расположенными и управляемыми так, чтобы летательный аппарат двигался по маршруту.
В таком примере четыре квадрокоптера 2a-d расположены относительно несущей рамы 3 и управляются для обеспечения крейсерского движения летательного аппарата 1, то есть для выполнения горизонтального движения в определенном направлении (см. стрелку на фиг. 3В в направлении оси Y) и с одинаковой тягой во всех квадрокоптерах 2а-d. В таком примере квадрокоптеры 2a-d расположены в одной плоскости, причем указанная плоскость находится под определенным углом по отношению к горизонтальной плоскости. Контроллер управляет всеми квадрокоптерами 2a-d для поворота относительно их соответствующих шаровых шарниров 4 так, чтобы их векторы тяги (величина тяги и угол наклона) относительно несущей рамы 3 были одинаковыми. В некоторых случаях тяга, создаваемая несущими винтами 5, может быть изменена в зависимости от необходимой крейсерской скорости. В некоторых других примерах квадрокоптеры 2a-d могут поворачиваться через их соответствующие шаровые шарниры с другим углом наклона относительно несущей рамы 3, так что направление движения может быть другим, например, квадрокоптеры 2a-d могут поворачиваться влево с таким же углом относительно несущей рамы 3 и такой же тягой для направления летательного аппарата 1 в этом направлении.
На фиг. 4А-С показаны вид спереди, вид сбоку и вид сверху примера летательного аппарата на фиг. 1, соответственно, с четырьмя квадрокоптерами 2a-d, расположенными и управляемыми так, чтобы обеспечить зависание летательного аппарата 1, и с потоком, нисходящим по направлению к его наружной части в режиме устойчивого движения.
В таком примере все квадрокоптеры 2a-d наклонены под одним и тем же углом к центру несущей рамы 3. Таким образом, каждый квадрокоптер 2a-d расположен в другой плоскости, но наклонен под одним и тем же углом относительно горизонтальной плоскости. Контроллер управляет всеми квадрокоптерами 2a-d так, чтобы они поворачивались относительно их соответствующих шаровых шарниров 4, так что их величина тяги и угол наклона относительно горизонтальной плоскости такие же, но квадрокоптеры 2а и 2b и квадрокоптеры 2с и 2d ориентированы противоположно друг другу. В некоторых других примерах контроллер может управлять квадрокоптерами 2a-d так, чтобы они поворачивались относительно их соответствующих шаровых шарниров, чтобы быть расположенными под углом, дополняющим до 90 градусов угол, показанный на фиг. 4, так что квадрокоптеры 2a-d все наклонены от центра несущей рамы 3. В некоторых других примерах четыре квадрокоптера 2a-d также могут быть расположены и управляемы так, чтобы летательный аппарат 1 зависал, но с потоком, нисходящим по направлению к его внутренней части.
На фиг. 5А-С показаны вид спереди, вид сбоку и вид сверху примера летательного аппарата по фиг. 1, соответственно, с четырьмя квадрокоптерами, расположенными и управляемыми так, чтобы вызвать движение вправо летательного аппарата с разной тягой в его несущих винтах.
В таком примере квадрокоптеры 2а и 2с имеют первый вектор тяги, наклоненный под первым углом относительно горизонтальной плоскости, а квадрокоптеры 2b и 2d имеют второй вектор тяги, наклоненный под вторым углом относительно горизонтальной плоскости, причем первый угол меньше второго угла. Таким образом, все квадрокоптеры 2a-d расположены в разных плоскостях, но все они наклонены в одном направлении, в частности вправо (см. стрелку на фиг 5А в плоскости X-Z), чтобы направить летательный аппарат 1 в этом направлении. Следовательно, контроллер управляет всеми квадрокоптерами 2a-d так, чтобы они поворачивались относительно их соответствующих шаровых шарниров 4 с углом наклона относительно ранее упомянутой горизонтальной плоскости. Тяга квадрокоптеров 2а и 2с одинакова и отличается от тяги квадрокоптеров 2b и 2d.
На фиг. 6А показан детализированный вид одного из квадрокоптеров на фиг.1, с указанным квадрокоптером, выталкивающимся от плеча летательного аппарата (устойчивое равновесие). В таком примере квадрокоптер 2а расположен в верхней плоскости относительно плеча 10 несущей рамы 3, так что плечо 10 вытягивается через шаровой шарнир 4. Следовательно, тяга (стрелка вверх), создаваемая квадрокоптером 2а, тянет летательный аппарат вертикально и вверх, пока сила тяжести (стрелка вниз) толкает летательный аппарат 1 вниз. На фиг.6 В показан детализированный вид одного из квадрокоптеров на фиг. 1, с указанным квадрокоптером, толкающим плечо летательного аппарата (неустойчивое равновесие). В таком примере квадрокоптер 2а расположен в нижней плоскости относительно плеча 10 несущей рамы 3, так что плечо 10 толкается через шаровой шарнир 4. Следовательно, тяга (стрелка вверх), создаваемая квадрокоптером 2а, толкает летательный аппарат 1 вертикально и вверх, в то время как сила тяжести (стрелка вниз) толкает летательный аппарат 1 вниз.
Хотя на фиг. 6А и 6В показан квадрокоптер 2а, соединенный с несущей рамой 3 посредством шарового шарнира 4, любой шарнир с максимум тремя DOF (например, сферический шарнир) относительно данной точки поворота и минимум одной DOF относительно данной точки поворота (например, цилиндрический шарнир), находящейся в конфигурациях тяни или толкай, то есть с шарниром, тянущим квадрокоптер, или когда шарнир толкается квадрокоптером, может быть использован. Конфигурация отталкивания является более стабильной конфигурацией, поскольку равновесие сил (тяги и силы тяжести) находится в устойчивом равновесии, в то время как конфигурация отталкивания является наиболее нестабильной, поскольку равновесие сил находится в неустойчивом равновесии.
На фиг. 7 показаны схематические изображения в плане различных примеров архитектуры летательного аппарата. На таких схематических изображениях показаны пять различных архитектур. Следует понимать, что приведенная в качестве примера архитектура летательного аппарата может включать дополнительные элементы и что некоторые из элементов, описанных в настоящем документе, могут быть удалены и/или изменены, не выходя за рамки приведенной в качестве примера архитектуры летательного аппарата. Кроме того, реализация приведенных в качестве примера архитектур летательного аппарата не ограничивается таким примером, как показано на фиг. 7.
Возможны множественные комбинации между количеством мультикоптеров и количеством силовых установок (например, несущих винтов, турбовинтовых двигателей, реактивных двигателей и т.д.), размещенных на каждом мультикоптерном блоке. Таким образом, можно было бы комбинировать разные архитектуры летательного аппарата по следующей формуле, которая определяет общее количество силовых установок в мультикоптерном беспилотном летательном аппарате:
где «Np» представляет собой количество силовых установок, «N» представляет собой количество мультикоптерных блоков (по меньшей мере два мультикоптерных блока), прикрепленных к несущей раме летательного аппарата, а «А» представляет собой количество силовых установок (по меньшей мере две силовые установки), которые есть у каждого мультикоптера. Например, при N=4 и А=4 летательный аппарат представляет собой квадрокоптер (несущая рама с четырьмя мультикоптерными блоками) из квадрокоптеров (к каждому мультикоптерному блоку прикреплены четыре силовые установки), а при N=3 и А=4 летательный аппарат представляет собой трикоптер (несущая рама с тремя мультикоптерными блоками) из квадрокоптеров (к каждому мультикоптерному блоку прикреплены четыре силовые установки).
Первая архитектура а) соответствует бикоптеру из бикоптеров (N=2 и А=2). Таким образом, летательный аппарат 11 образован двумя бикоптерами 12, прикрепленными к несущей раме 13 через сферические шарниры. В такой архитектуре несущая рама 13 может представлять собой удлиненное тело с двумя бикоптерами 12, прикрепленными к его соответствующим концам. Каждый бикоптер 12 снабжен тремя силовыми установками 14, прикрепленными к их соответствующим корпусам 15.
Вторая архитектура b) соответствует бикоптеру из трикоптеров (N=2 и А=3). Таким образом, летательный аппарат 16 образован двумя трикоптерами 17, прикрепленными к несущей раме 18 через сферические шарниры. В такой архитектуре несущая рама 18 может быть удлиненным телом с двумя трикоптерами 17, прикрепленными к его соответствующим концам. Каждый трикоптер 17 снабжен тремя силовыми установками 19, прикрепленными к их соответствующим корпусам 20.
Третья архитектура с) соответствует трикоптеру из трикоптеров (N=3 и А=3). Таким образом, летательный аппарат 21 образован тремя трикоптерами 22, прикрепленными к несущей раме 23 через сферические шарниры. В такой архитектуре несущая рама 23 может представлять собой по существу треугольный корпус с тремя трикоптерами 22, прикрепленными в непосредственной близости к его углам. Каждый трикоптер 22 снабжен тремя силовыми установками 24, прикрепленными к их соответствующим корпусам 25.
Четвертая архитектура d) соответствует квадрокоптеру из квадрокоптеров (N=4 и А=4). Таким образом, летательный аппарат 26 образован четырьмя квадрокоптерами 27, прикрепленными к несущей раме 28 через сферические шарниры. В такой архитектуре несущая рама 28 может быть по существу четырехугольным корпусом с четырьмя квадрокоптерами 27, прикрепленными в непосредственной близости от его соответствующих углов. Каждый квадрокоптер 27 имеет четыре силовых установки 29, прикрепленных к их соответствующим корпусам 30.
Пятая архитектура е) соответствует квадрокоптеру из трикоптеров (N=4 и А=3). Таким образом, летательный аппарат 31 образован четырьмя трикоптерами 32, прикрепленными к несущей раме 33 через сферические шарниры. В такой архитектуре несущая рама 33 может быть по существу четырехугольным корпусом с четырьмя трикоптерами 32, прикрепленными в непосредственной близости от его соответствующих углов. Каждый трикоптер 32 снабжен тремя силовыми установками 34, прикрепленными к их соответствующим корпусам 35.
В таком примере все архитектуры могут содержать шаровые шарниры или сферические шарниры с тремя DOF для обеспечения резервных CDOF летательным аппаратам. Могут быть предусмотрены другие архитектуры и геометрии летательного аппарата. Однако архитектуры, описанные в таком примере, являются лишь показательными примерами архитектур мультикоптерных беспилотных летательных аппаратов, и другие альтернативные архитектуры и геометрии могут быть рассмотрены.
На фиг.8 показан пример узла 40 сферического шарнира для прикрепления конкретного квадрокоптера 48 к плечу 46 несущей рамы представленного в качестве примера летательного аппарата с несвязанными DOF. В контексте настоящего описания сферический шарнир может относиться к любому шарниру, который допускает свободное вращение в двух плоскостях одновременно, предотвращая перемещение в любом направлении. Следует понимать, что приведенный в качестве примера узел 40 сферического шарнира может включать дополнительные элементы, и что некоторые из элементов, описанных в настоящем документе, могут быть удалены и/или изменены без отклонения от объема приведенного в качестве примера узла 40 сферического шарнира. Кроме того, реализация приведенного в качестве примера узла 40 сферического шарнира не ограничивается таким примером, как показано на фиг 8.
В таком примере узел 40 сферического шарнира представляет собой узел шарового шарнира, образованный шаровым пальцем 41 и корпусом 42. Корпус 42 имеет сквозное отверстие, в которое вставлен шаровой палец 41. Шаровой палец 41 имеет хвостовик 43 и шаровую часть 44. Шаровая часть 44 характеризуется полусферической формой и входит в сквозное отверстие корпуса 42, так что хвостовик 43 выступает из сквозного отверстия. Хвостовик 43 прикреплен к выступу 45 плеча 46 несущей рамы летательного аппарата.
Корпус 42 сформирован в части 47 держателя узла 40 шарового шарнира. Эта часть 47 держателя соединена с основным корпусом квадрокоптера 48. Например, винты могут использоваться для прикрепления части держателя к основному корпусу квадрокоптера 48.
Указанный узел 40 сферического шарнира допускает движения, которые будут определяться суммой сил, создаваемых квадрокоптером 48, прикрепленным к нему. Узел сферического шарнира позволяет изменять относительное положение квадрокоптера и, таким образом, обеспечивает летательному аппарату дополнительную мобильность и независимые DOF за счет объединения различных сил, создаваемых множеством мультикоптеров, прикрепленных к несущей раме через сферические шарниры.
В некоторых примерах сферические шарниры могут включать механизм ограничения одной или нескольких DOF. Например, в летательном аппарате для перевозки людей может оказаться ненужным наличие всех DOF сферического шарнира, как, например, режим эксплуатации с перемещением летательного аппарата назад на максимальной скорости. В этом случае сферический шарнир может характеризоваться наличием механической системы, такой как болт или защелка, для ограничения наклона назад. Шарнир может дополнительно содержать систему дистанционного управления для активации механической системы ограничения определенной DOF. Эти ограничивающие механизмы также могут быть полезны в режимах эксплуатации, в которых требования к управляемости или безопасности более высокие (например, при посадке). Например, во время аварийной посадки некоторые из DOF сферических шарниров могут быть заблокированы, чтобы сферические шарниры оставались перпендикулярными земле.
Сферические шарниры могут также иметь дополнительные элементы для обеспечения дополнительных функций. Например, среди прочего, амортизирующие механизмы для переменного демпфирования сил, действующих на шарнир во время движения летательного аппарата, механизмы создания силы для создания противоположной и переменной силы в чашке шарнира при выполнении движения и механизмы создания силы для создания переменной силы, действующей на шарнир, когда он достигает своих механических пределов (буфер).
Таким образом, использование шарниров по меньшей мере с одной DOF для прикрепления мультикоптерных блоков к несущей раме обеспечивает независимую DOF без наличия сервоприводов в архитектуре. Кроме того, масса и электронные устройства, связанные с сервоприводами, предотвращаются, и в то же время снижается потребление энергии.
На фиг.9 показан пример системы 50 управления для управления летательным аппаратом на фиг.1. Следует понимать, что представленная в качестве примера система 50 управления может включать дополнительные элементы, и что некоторые из элементов, описанных в настоящем документе, могут быть удалены и/или изменены без отклонения от объема представленной в качестве примера системы 50 управления. Кроме того, реализация представленной в качестве примера системы 50 управления не ограничена таким примером, как показано на фиг.9.
Согласно такому примеру система 50 управления содержит контроллер 51, который соединен с возможностью связи с блоком 52 обработки исходных данных, который определяет смещение несущей рамы 3 относительно горизонтальной плоскости. Блок 52 обработки исходных данных может быть соединен с возможностью связи с инерциальным измерительным блоком 53. В свою очередь, указанный инерциальный измерительный блок 53 также соединен с возможностью связи с множеством акселерометров 54 и/или гироскопов 55, расположенных в разных местах на несущей раме 3 для измерения таких параметров, как, например, ускорение, ориентация, угловая скорость и т.д. Используемый в настоящем изобретении блок 52 обработки исходных данных может представлять собой любую комбинацию программного и аппаратного обеспечения, выполненного с возможностью выполнения описанных функций блока обработки исходных данных.
Если летательный аппарат 1 управляется дистанционно, контроллер 51 может быть дополнительно соединен с возможностью связи с приемопередатчиком, выполненным с возможностью приема инструкций от пульта дистанционного управления для пилотирования летательного аппарата. В качестве альтернативы, если летательный аппарат 1 является автономным летательным аппаратом, контроллер может быть соединен с блоком обработки данных автопилота, содержащим программное и аппаратное обеспечение для выполнения автономного полета.
Контроллер 51 выполнен с возможностью получения текущей ориентации несущей рамы 3 от блока 52 обработки исходных данных. На основе текущей ориентации несущей рамы 3, текущей тяги и предполагаемых тяги и направления движения основной контроллер определяет величину тяги для каждого из двигателей 56, связанных с силовыми установками (например, несущими винтами). Контроллер 52 отправляет вычисленные значения тяги в блок 57 обработки данных о числе оборотов. Блок 57 обработки данных о числе оборотов, который связан с каждым из двигателей 56 квадрокоптеров 2a-d, отправляет соответствующие ретрансляционные сигналы на соответствующие двигатели в квадрокоптерах 2a-d, которые будут определять число оборотов несущих винтов. Изменяя величину тяги различных силовых установок, положение квадрокоптеров 2a-d относительно несущей рамы 3 будет изменено.
Согласно некоторым другим примерам система управления может содержать основной контроллер, расположенный в несущей раме, и множество вторичных контроллеров, причем каждый вторичный контроллер расположен в соответствующем мультикоптерном блоке. Кроме того, каждый мультикоптер может иметь свой блок обработки данных о числе оборотов. С такой архитектурой системы управления вторичные контроллеры могут быть выполнены с возможностью управления соответствующими мультикоптерными блоками, а основной контроллер может быть выполнен с возможностью управления множеством вторичных контроллеров. Указанный основной контроллер может быть соединен с возможностью связи с блоком обработки исходных данных для приема информации об ориентации несущей рамы, в то время как вторичные контроллеры могут быть соединены с возможностью связи с основным контроллером. Таким образом, основной контроллер с информацией о текущей ориентации, текущем направлении движения и предполагаемом направлении движения летательного аппарата может определять направление, которое будет принимать летательный аппарат. Основной контроллер может передавать направление движения, то есть вектор тяги для летательного аппарата, вторичным контроллерам, так что каждый вторичный контроллер может управлять соответствующим мультикоптерным блоком, чтобы направлять летательный аппарат в нужном направлении. Каждый вторичный контроллер может отправлять рассчитанную тягу для этого конкретного квадрокоптера в соответствующий блок обработки данных о числе оборотов. Блок обработки данных о числе оборотов может посылать соответствующие ретрансляционные сигналы на соответствующие двигатели квадрокоптеров, которые будут определять число оборотов их несущего винта.
На фиг. 10 представлена блок-схема представленного в качестве примера способа управления летательного аппарата с несвязанными DOF.
На этапе 61 способа 60 обеспечивается летательный аппарат с несвязанными DOF, как описано ранее. Указанный летательный аппарат состоит из несущей рамы, множества мультикоптерных блоков, прикрепленных к несущей раме через соответствующие шарниры, где по меньшей мере один шарнир имеет как минимум одну степень свободы, так что несущая рама имеет такое же или большее число CDOF, чем общее количество DOF несущей рамы.
На этапе 62 способа блок обработки исходных данных летательного аппарата определяет смещение летательного аппарата относительно горизонтальной плоскости. Предпочтительно, блок обработки исходных данных может быть соединен с возможностью связи с инерциальным измерительным блоком и множеством акселерометров и/или гироскопов, расположенных на несущей раме.
На этапе 63 способа 60 контроллер летательного аппарата определяет единый вектор тяги или заданные значения (тяга+углы наклона, рыскание, крен и тангаж) для всего летательного аппарата на основе определенного смещения. Затем контроллер вычисляет вектор тяги (углы тяги и наклона) для каждого из множества мультикоптерных блоков на основе ранее вычисленного единого вектора тяги.
На этапе 64 способа 60 контроллер регулирует тягу каждой силовой установки множества мультикоптерных блоков на основе определенной тяги.
На этапе 65 способа 60 контроллер регулирует угол наклона множества мультикоптерных блоков, выполняя поворотное движение каждого мультикоптерного блока относительно несущей рамы через шарниры, причем относительное поворотное движение основывается на определенном угле наклона.
Летательный аппарат с несвязанными DOF, описанный в настоящем документе, может быть полезен для обеспечения масштабируемых архитектур летательных аппаратов, основанных на минимуме силовых модулей, которые соединены в общую структуру шарнирами по меньшей мере с одной DOF и до трех DOF поворота. Эти шарниры, связывающие каждый мультикоптерный блок с основной конструкцией летательного аппарата, могут обеспечивать до 3 степеней свободы поворота (поворот по оси X, поворот по оси Y и поворот по оси Z) и обеспечивают возможность точного позиционирования каждого мультикоптерного блока относительно основной конструкции летательного аппарата. Все эти преимущества позволяют летательному аппарату выполнять движения, которые в настоящее время не могут быть выполнены существующими летательными аппаратами с неподвижными силовыми установками.
В этом тексте термин «содержит» и его производные (такие как «содержащий» и т.д.) не следует понимать в исключающем смысле, то есть эти термины не следует интерпретировать как исключающие возможность того, что описанное и определенное может включать дополнительные элементы.
Настоящее изобретение очевидно не ограничивается конкретными вариантами осуществления, описанными в настоящем документе, но также охватывает любые варианты, которые может рассматривать любой специалист в данной области техники в пределах общего объема изобретения, как определено в формуле изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| МУЛЬТИКОПТЕР С ВОЗДУШНЫМИ ВИНТАМИ РАЗЛИЧНОГО НАЗНАЧЕНИЯ | 2016 |
|
RU2718460C1 |
| МУЛЬТИКОПТЕР С ДВУХЪЯРУСНЫМ РАСПОЛОЖЕНИЕМ ВИНТОМОТОРНЫХ ГРУПП | 2021 |
|
RU2766284C1 |
| УНИВЕРСАЛЬНЫЙ МНОГОФУНКЦИОНАЛЬНЫЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ КВАДРОКОПТЕРНОГО ТИПА | 2024 |
|
RU2835704C1 |
| МУЛЬТИКОПТЕР | 2018 |
|
RU2685107C1 |
| Экраноплан с двигательной установкой, выполненной по схеме мультикоптера | 2023 |
|
RU2833275C1 |
| ЛЕТАТЕЛЬНЫЙ АППАРАТ | 2022 |
|
RU2797468C1 |
| СПОСОБ АВАРИЙНОЙ ПОСАДКИ КВАДРОКОПТЕРА | 2017 |
|
RU2657659C1 |
| ГИБРИДНЫЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ КРИШТОПА (ГЛАК) И СПОСОБ ФУНКЦИОНИРОВАНИЯ ГЛАК (ВАРИАНТЫ) | 2023 |
|
RU2815129C1 |
| МУЛЬТИКОПТЕР С ВОЗДУШНЫМИ ВИНТАМИ КОМБИНИРОВАННОГО НАЗНАЧЕНИЯ И ГИБРИДНОЙ ДВИГАТЕЛЬНОЙ УСТАНОВКОЙ ВИНТОМОТОРНЫХ ГРУПП | 2022 |
|
RU2803214C1 |
| Малогабаритный летательный аппарат (ЛА) вертикального взлета/посадки с увеличенной дальностью полета | 2017 |
|
RU2681464C1 |
Изобретение относится к области авиации, в частности к конструкциям многовинтовых летательных аппаратов. Летательный аппарат содержит несущую раму и множество управляемых мультикоптерных блоков. Каждый мультикоптерный блок имеет множество силовых установок. Силовые установки прикреплены к соответствующему мультикоптерному блоку с постоянным углом крена, постоянным углом тангажа и постоянным углом рыскания. Множество управляемых мультикоптерных блоков прикреплены к несущей раме через соответствующие шарниры и поворачиваются относительно несущей рамы независимо друг от друга. По меньшей мере один из шарниров имеет минимум одну степень свободы, так что несущая рама имеет по меньшей мере такое же или большее, чем общее количество степеней свободы несущей рамы, количество управляемых степеней свободы. Обеспечивается большая эффективность в полете, точность движения, повышение безопасности полета. 2 н. и 13 з.п. ф-лы, 10 ил.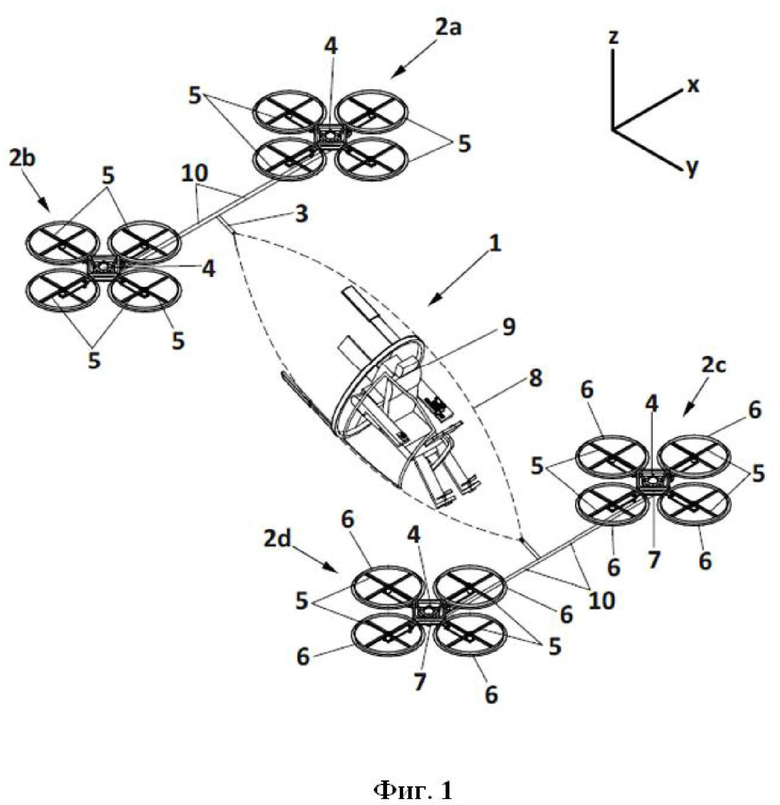
1. Летательный аппарат, содержащий:
несущую раму;
множество управляемых мультикоптерных блоков, каждый мультикоптерный блок характеризуется наличием множества силовых установок, в котором множество силовых установок прикреплены к мультикоптерному блоку с постоянным углом рыскания, постоянным углом крена и постоянным углом тангажа; и
в котором множество управляемых мультикоптерных блоков прикреплены к несущей раме через соответствующие шарниры и поворачиваются относительно несущей рамы независимо друг от друга, и где по меньшей мере один шарнир имеет по меньшей мере одну степень свободы, так что несущая рама имеет такое же или большее, чем общее количество степеней свободы несущей рамы, количество управляемых степеней свободы.
2. Летательный аппарат по п. 1, в котором шарниры имеют максимум три степени свободы.
3. Летательный аппарат по любому из предшествующих пунктов, в котором несущая рама характеризуется наличием множества плеч, отходящих от нее радиально, а каждый управляемый мультикоптерный блок прикреплен к соответствующему плечу множества плеч.
4. Летательный аппарат по любому из предшествующих пунктов, в котором шарниры содержат систему разъединения, так что множество управляемых мультикоптерных блоков разъемно прикреплены к несущей раме.
5. Летательный аппарат по любому из предшествующих пунктов, в котором шарниры содержат стопорные средства, выполненные с возможностью ограничения движения шарниров по меньшей мере в одной степени свободы.
6. Летательный аппарат по любому из предшествующих пунктов, в котором шарниры содержат блокирующие средства, выполненные с возможностью временной блокировки движения шарниров по меньшей мере в одной степени свободы.
7. Летательный аппарат по любому из предшествующих пунктов, в котором шарниры содержат амортизирующие средства, выполненные с возможностью поглощения ударных импульсов, создаваемых движением мультикоптерных блоков относительно несущей рамы.
8. Летательный аппарат по любому из предшествующих пунктов, в котором шарниры выбраны из группы, содержащей сферические шарниры, карданные шарниры, шаровые шарниры, шарниры постоянной угловой скорости и любые их комбинации.
9. Летательный аппарат по п. 1, в котором множество управляемых мультикоптерных блоков расположены на одинаковом расстоянии от центральной точки несущей рамы.
10. Летательный аппарат по любому из предшествующих пунктов, содержащий блок обработки исходных данных, расположенный на несущей раме и выполненный с возможностью определения смещения несущей рамы относительно горизонтальной плоскости.
11. Летательный аппарат по любому из предшествующих пунктов, содержащий контроллер, расположенный в несущей раме, выполненный с возможностью управления множеством мультикоптерных блоков.
12. Летательный аппарат по любому из предшествующих пунктов, содержащий:
основной контроллер, расположенный в несущей раме; и
множество вторичных контроллеров, каждый вторичный контроллер расположен в соответствующем мультикоптерном блоке;
в котором множество вторичных контроллеров выполнено с возможностью управления соответствующими мультикоптерными блоками, а основной контроллер выполнен с возможностью управления множеством вторичных контроллеров.
13. Способ управления летательным аппаратом, причем способ предусматривает выполнение этапов, на которых:
обеспечивают летательный аппарат по любому из предшествующих пунктов;
определяют с помощью блока обработки исходных данных смещение летательного аппарата относительно горизонтальной плоскости;
определяют с помощью контроллера летательного аппарата тягу и угол наклона летательного аппарата на основе определенного смещения;
регулируют с помощью контроллера тягу каждого из множества мультикоптерных блоков на основе определенной тяги; и
регулируют с помощью контроллера угол наклона каждого из множества мультикоптерных блоков посредством осуществления поворотного движения каждого мультикоптерного блока относительно несущей рамы через шарниры, причем относительное поворотное движение основано на определенном угле наклона.
14. Способ по п. 13, в котором летательный аппарат характеризуется наличием основного контроллера, прикрепленного к несущей раме, и вторичного контроллера, прикрепленного к каждому мультикоптерному блоку, в котором множество вторичных контроллеров используют для управления соответствующими мультикоптерными блоками, а основной контроллер используют для управления множеством вторичных контроллеров, причем способ предусматривает выполнение этапов, на которых:
определяют с помощью основного контроллера тягу и угол наклона летательного аппарата, основанные на определенном смещении;
регулируют с помощью каждого вторичного контроллера тягу соответствующего мультикоптерного блока на основе определенной тяги; и
регулируют с помощью каждого вторичного контроллера угол наклона соответствующего мультикоптерного блока посредством осуществления поворотного движения мультикоптерного блока относительно несущей рамы через шарниры, причем относительное поворотное движение основано на определенном угле наклона.
15. Способ по п. 13, в котором летательный аппарат характеризуется наличием множества контроллеров, выполненных с возможностью управления множеством мультикоптерных блоков, причем способ предусматривает выполнение этапов, на которых:
определяют с помощью любого из множества контроллеров тягу и угол наклона летательного аппарата на основе определенного смещения;
регулируют с помощью любого из множества контроллеров тягу множества мультикоптерных блоков на основе определенной тяги; и
регулируют с помощью любого из множества контроллеров угол наклона множества мульткоптерных блоков посредством осуществления поворотного движения мультикоптерных блоков относительно несущей рамы через шарниры, причем относительное поворотное движение основано на определенном угле наклона.
| WO 2018106137 A3, 26.07.2018 | |||
| US 20180148169 A1, 31.05.2018 | |||
| US 20060016930 A1, 26.01.2006 | |||
| СПОСОБ УПРАВЛЕНИЯ, СТАБИЛИЗАЦИИ И СОЗДАНИЯ ДОПОЛНИТЕЛЬНОЙ ПОДЪЕМНОЙ СИЛЫ ДИРИЖАБЛЯ | 2013 |
|
RU2532448C1 |
| КВАДРОЛЕТ | 2013 |
|
RU2547950C1 |

