ОБЛАСТЬ ТЕХНИКИ
Данное техническое решение относится к области применения беспилотных воздушных судов (БВС) и механических манипуляторов, в частности к способам проведения спасательных работ (СР) в условиях чрезвычайной ситуации (ЧС) c помощью БВС.
УРОВЕНЬ ТЕХНИКИ
При происхождении ряда ЧС возникают условия, нахождение в которых личного состава, направленного на проведение поиска пострадавших и проведения спасательных работ (далее - поисково-спасательная команда, ПСК), без средств индивидуальной защиты (СИЗ) и/или специального оборудования является опасным. Такие условия возникают, например, при авариях, сопровождающихся выбросами опасных веществ в окружающую среду, при пожарах, стихийных бедствиях. В данных условиях весьма оправданным является применение беспилотных машин, управляемых дистанционно, способных выполнять операции СР.
Кроме того, следует учитывать, что при проведении СР существенную роль играет дефицит времени. Прибытие ПСК к месту проведения СР может быть затруднено вследствие значительного расстояния от места постоянной дислокации ПСК до зоны ЧС, наличия на путях сообщения дорожных заторов, возникающих в результате ЧС препятствий. Использование БВС, упрощает решение этой задачи.
Известны способы и системы, обеспечивающие проведение СР при помощи различных устройств без непосредственного участия человека.
В частности, известен медицинский робот Bloodhound, разработанный американской корпорацией iRobot в сотрудничестве с Acer Technology Ventures для оказания помощи раненым солдатам на поле боя [1]. Данный медицинский робот оснащен GPS, видеокамерами, стетоскопом, системой, обеспечивающей двустороннюю связь пострадавшего с оператором, а также манипулятором, способным производить некоторые операции по оказанию медицинской помощи пострадавшему. Недостатком медицинского робота Bloodhound является то, что он представляет собой наземную машину, пусть и способную самостоятельно объезжать препятствия, но при передвижении значительно зависящую от характера местности и затрачивающую значительное время на прибытие к месту проведения работ.
Известен беспилотный летательный комплекс первой помощи [2], представляющий собой беспилотный летательный аппарат с модульными системами медицинского оборудования и средств оказания первой помощи. Недостатком данного беспилотного летательного комплекса является отсутствие манипулятора: поблизости обязательно должно быть лицо, способное оказать медицинскую помощь пострадавшему, или сам пострадавший должен быть в состоянии оказать медицинскую помощь самому себе.
В [3] описан робот-манипулятор, имеющий семь степеней подвижности и предназначенный для робоассистенции в хирургии. Управление данным роботом-манипулятором осуществляется хирургом-оператором в полуавтоматическом или автоматическом режимах. Установка такого устройства на БВС значительно расширила бы спектр проводимых операций СР без непосредственного участия человека. Тем не менее, длина звеньев манипулятора играет существенную роль: в отличие от операционной, где имеется возможность расположения робота-манипулятора в непосредственной близости от операционного стола, корпус приземлившегося БВС рядом с пострадавшим находится на относительно большем удалении от тела последнего (в особенности, если используется крупногабаритное БВС с большой грузоподъемностью на высоких опорах-шасси). Изготовление звеньев манипулятора большей длины лишает его компактности: такой манипулятор затруднительно расположить даже в сложенном состоянии на корпусе БВС так, чтобы он не оказывал влияния на маневренность последнего.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Данное техническое решение направлено на устранение недостатков, свойственных решениям, известным из уровня техники.
Технической задачей, решаемой в данном техническом решении, является реализация способа проведения спасательных работ и беспилотного воздушного судна для осуществления способа.
Технический результат, достигаемый при решении вышеуказанной технической задачи, заключается в повышении скорости проведения СР и расширении спектра проводимых операций СР без непосредственного участия человека, повышение эффективности оказания медицинской помощи.
Указанный технический результат достигается благодаря осуществлению способа проведения СР с использованием БВС вертикальных взлета и посадки, работающего на электрическом аккумуляторе, оснащенного манипулятором и кассетой, ячейки которой укомплектованы инструментом и картриджами с расходными материалами. Способ проведения СР с использованием БВС включает следующие шаги:
- комплектуют ячейки кассеты картриджами с расходными материалами и/или инструментом в соответствии с возлагаемыми на беспилотное воздушное судно задачами по проведению спасательных работ, причем одна из ячеек комплектуется захватом зажимного типа;
- оснащают беспилотное воздушное судно кассетой, укомплектованной на предыдущем шаге;
- осуществляют запуск беспилотного воздушного судна к месту выполнения задачи;
- осуществляют посадку беспилотного воздушного судна по прибытии к месту выполнения задачи;
- подсоединяют к свободному концу манипулятора и извлекают из ячейки кассеты необходимый картридж с расходными материалами и/или инструмент;
- увеличивают рабочую зону манипулятора путем выдвижения внутренних выдвижных секций из наружных секций телескопических звеньев манипулятора;
- осуществляют соответствующую операцию, относящуюся к спасательным работам, управляя при этом посредством манипулятора пространственным положением присоединенного к нему картриджа с расходными материалами и/или инструмента;
- возвращают внутренние выдвижные секции телескопических звеньев манипулятора в исходное положение внутрь наружных секций;
- возвращают в ячейку кассеты и отсоединяют от манипулятора использованный картридж с расходными материалами и/или инструмент;
- при необходимости выполняют другие операции, относящиеся к спасательным работам, посредством манипулятора и соответствующих картриджей с расходными материалами и/или инструмента, повторяя действия, описанные на предыдущих пяти шагах;
- осуществляют возврат беспилотного воздушного судна на исходную позицию по окончании выполнения возложенных на него задач.
В некоторых вариантах осуществления изобретения БВС, оснащенное манипулятором и кассетой, укомплектованной необходимыми инструментом и картриджами с расходными материалами, выполняет задачи по оказанию медицинской помощи пострадавшим в ЧС.
В некоторых вариантах осуществления изобретения БВС, оснащенное манипулятором и кассетой, укомплектованной необходимыми инструментом и картриджами с расходными материалами, выполняет задачи по обнаружению, и/или локализации, и/или ликвидации источников ЧС.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
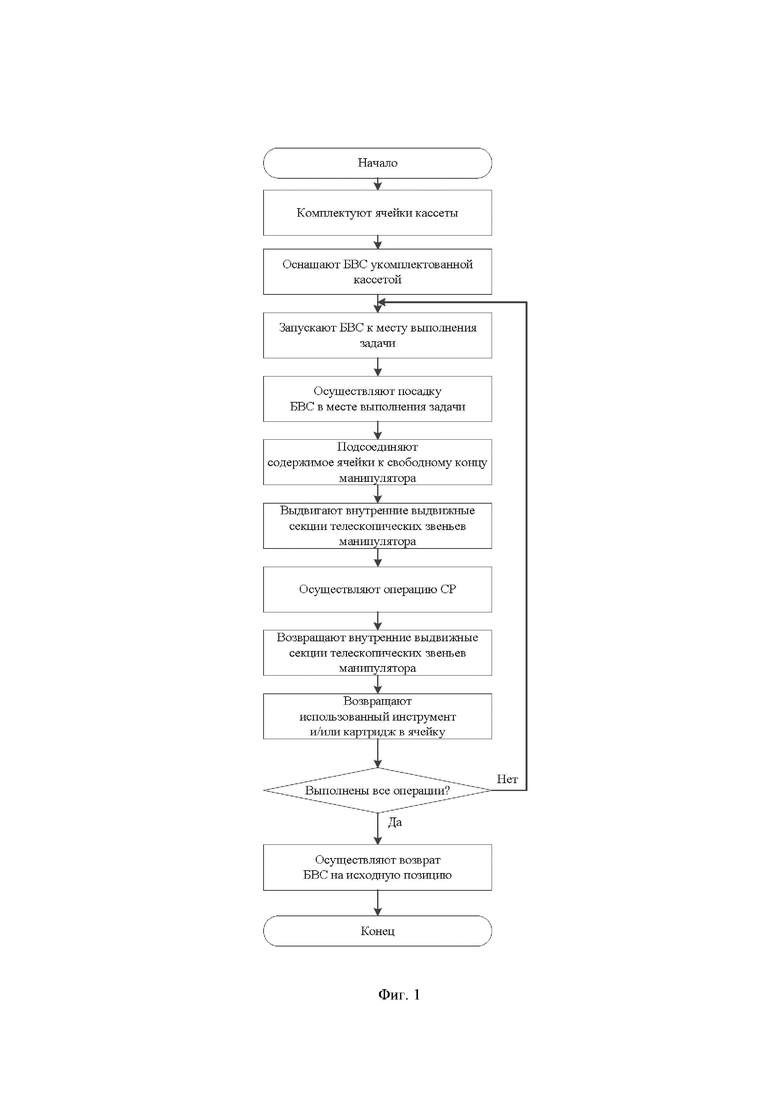
На фигуре 1 показан пример осуществления способа проведения СР за счет использования БВС, оснащенного манипулятором.
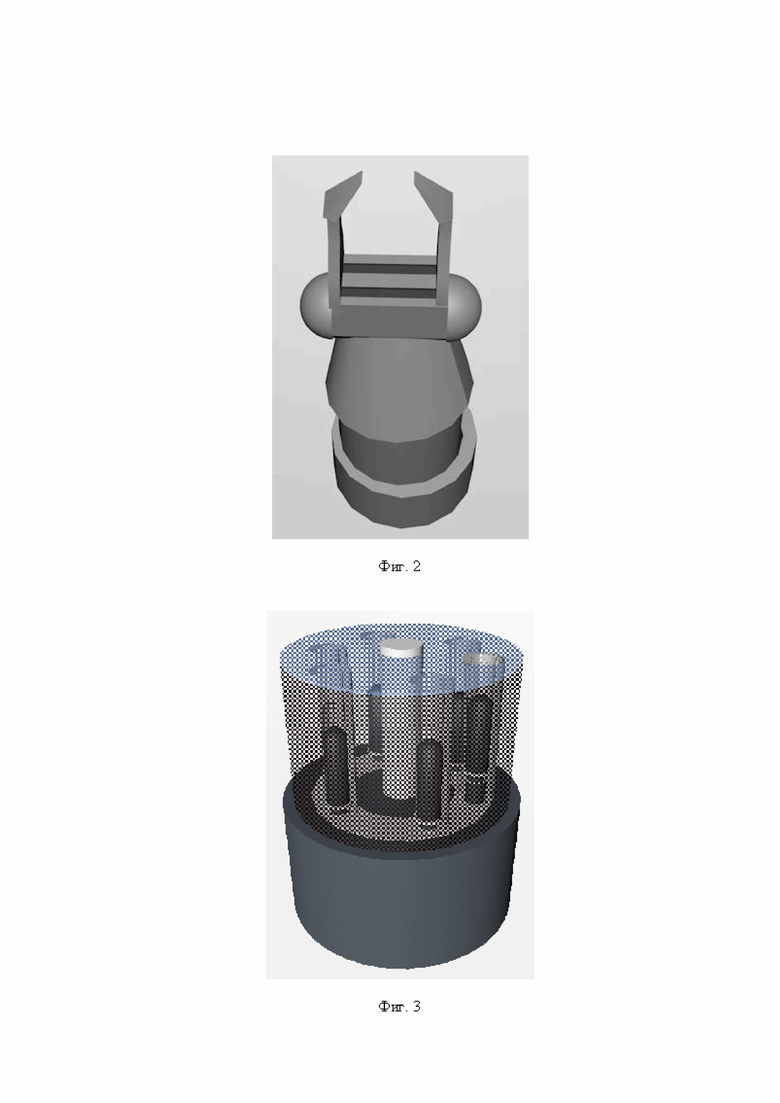
На фигуре 2 показан вариант осуществления одного из инструментов, подсоединяемых к свободному концу манипулятора, в виде захвата зажимного типа.
На фигуре 3 показан вариант осуществления одного из устройств, подсоединяемых к свободному концу манипулятора, в виде устройства для проведения инъекций.
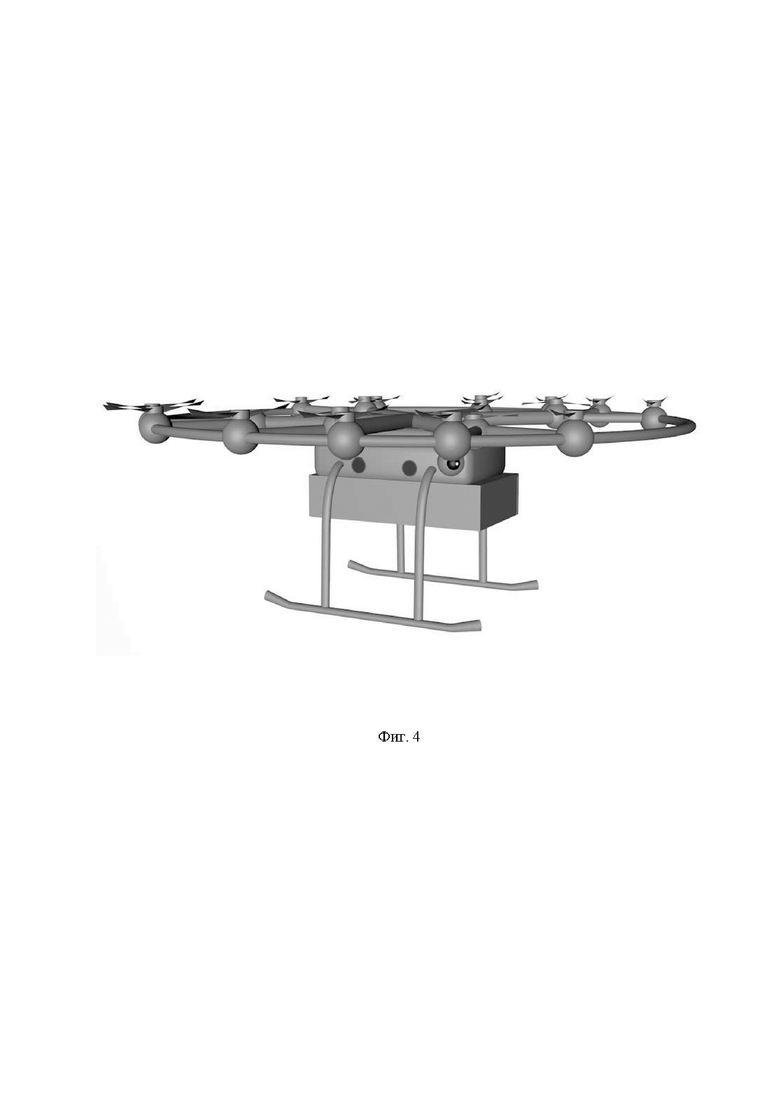
На фигуре 4 показан вариант осуществления БВС.
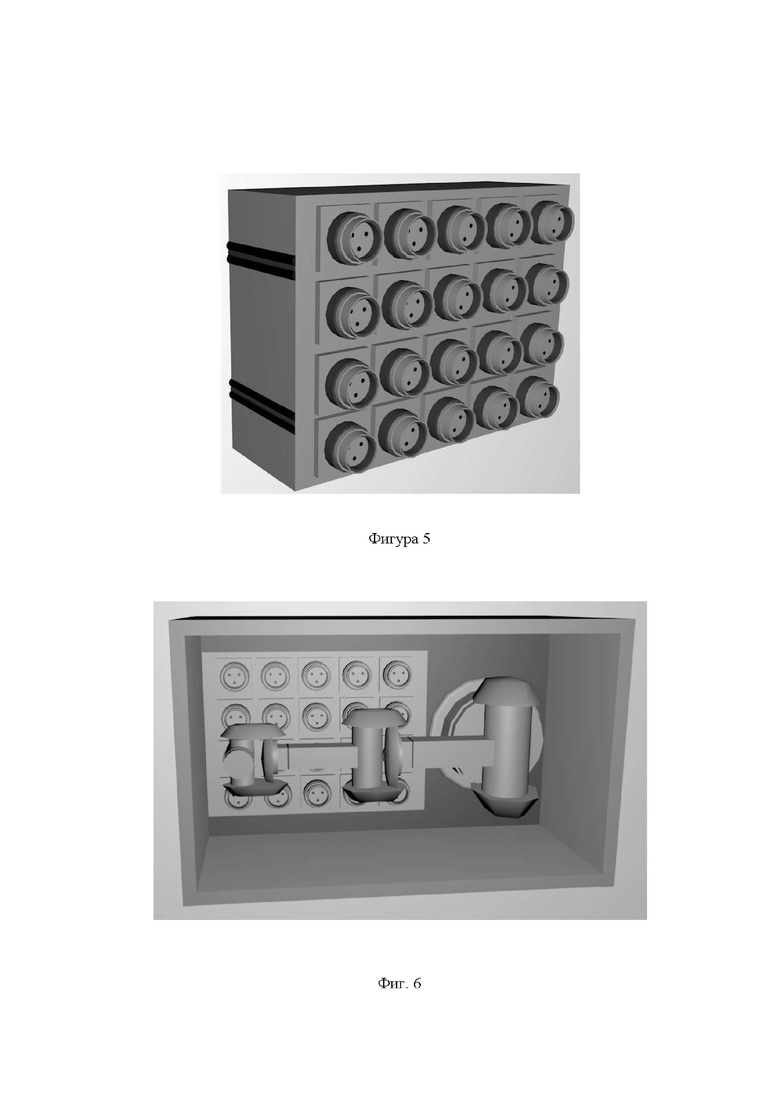
На фигуре 5 показан вариант осуществления кассеты с оборудованием.
На фигуре 6 показан вариант осуществления манипулятора, находящемся в грузовом отсеке БВС в походном положении.
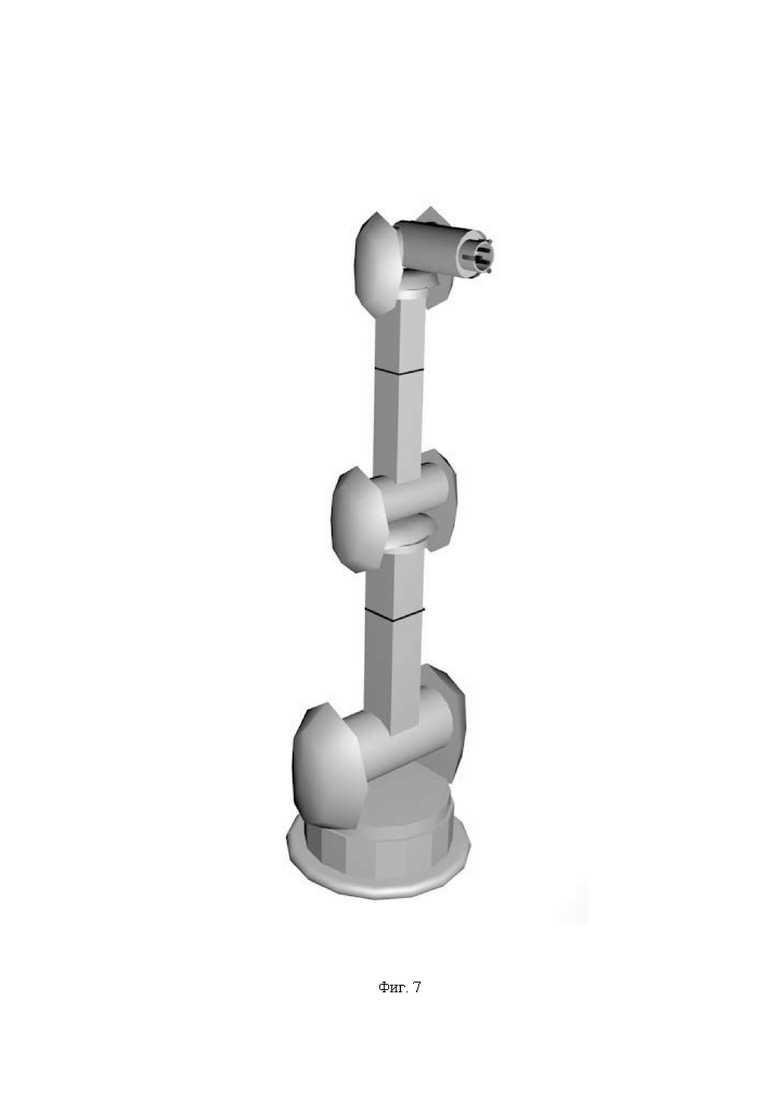
На фигуре 7 показан вариант осуществления манипулятора.
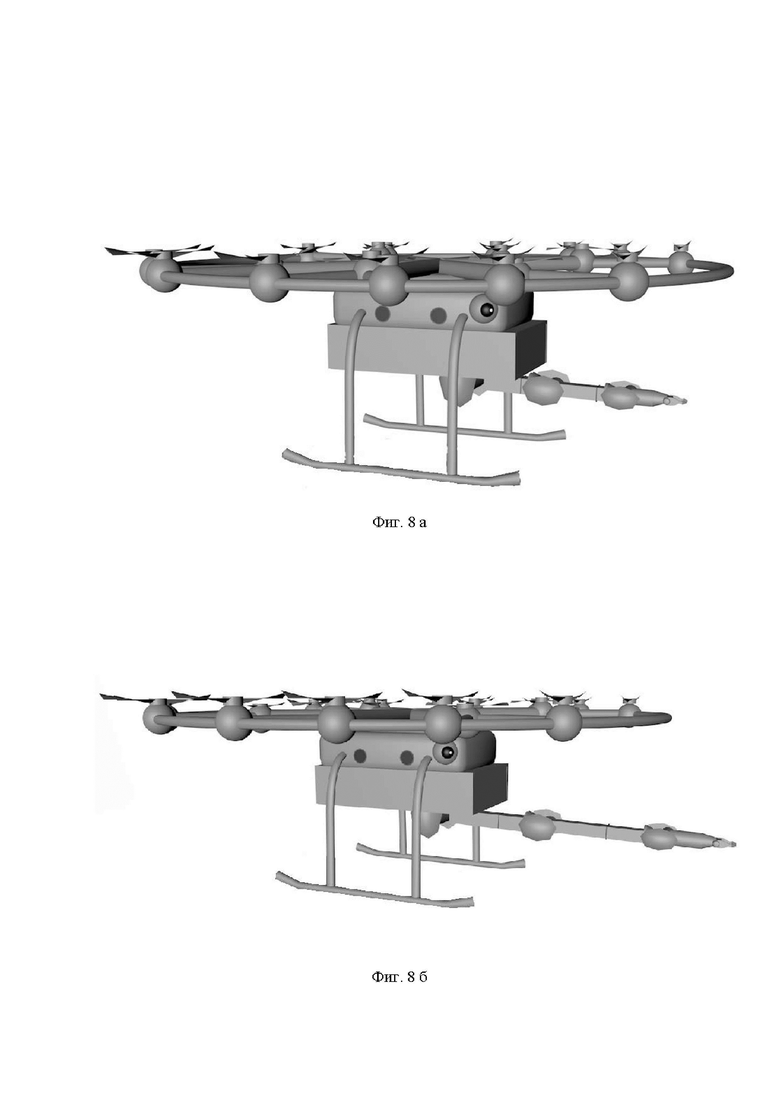
На фигуре 8 показан вариант осуществления манипулятора, находящегося в рабочем положении, причем выдвижные секции его плеча и предплечья: а) находятся внутри своих наружных секций, б) выдвинуты из своих наружных секций.
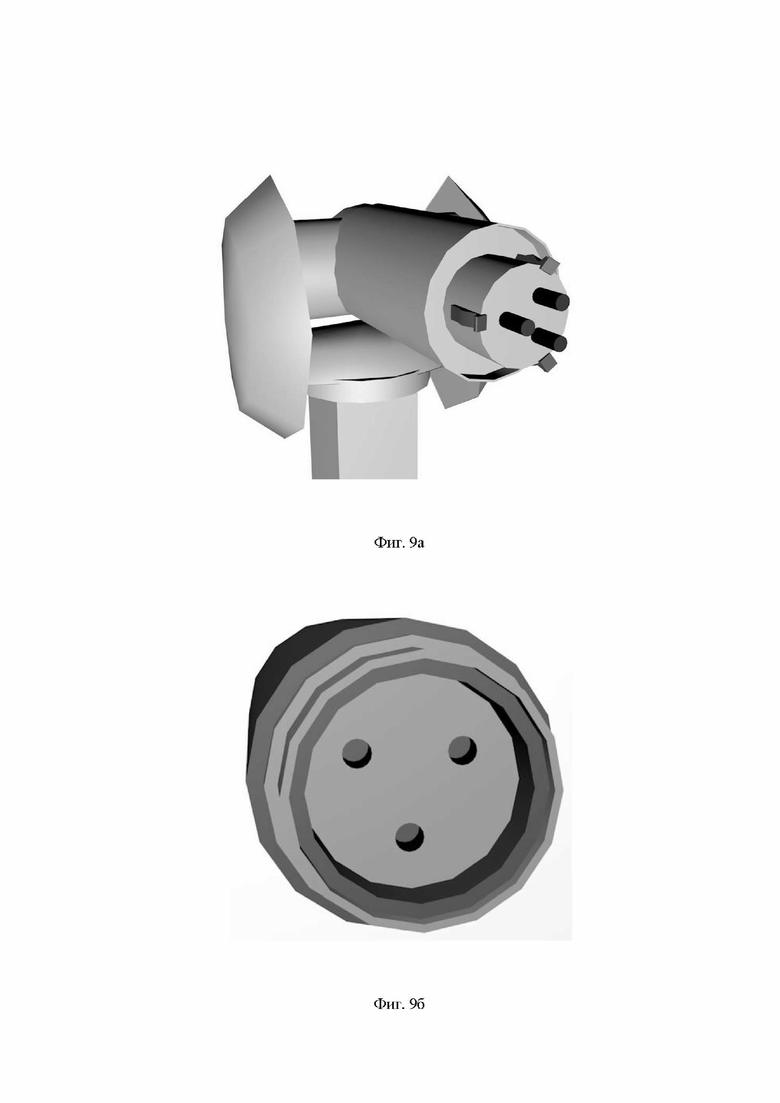
На фигуре 9 показан вариант осуществления вилки и розетки, находящихся соответственно на: а) рабочем конце манипулятора, б) съемном оборудовании.
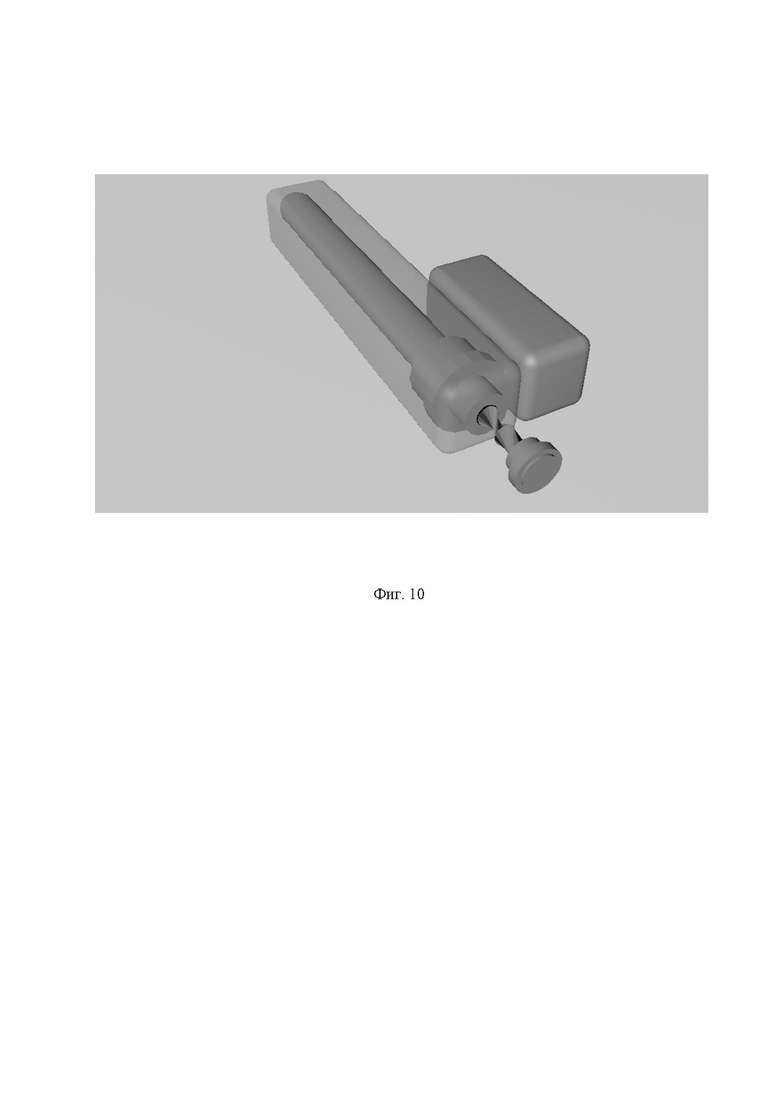
На фигуре 10 показан вариант осуществления электропривода, обеспечивающего движение выдвижных звеньев плеча и предплечья манипулятора.
ОСУЩЕСТВЛЕНИЕ ИЗОБРЕТЕНИЯ
В данном техническом решении под БВС понимается беспилотное воздушное судно вертикальных взлета и посадки, работающее на электрическом аккумуляторе. При этом в рамках предлагаемого технического решения БВС оснащено бортовым компьютером, манипулятором, а также содержит грузовой отсек, где размещается кассета с оборудованием, необходимым для проведения СР.
Бортовой компьютер - компьютер, находящийся на борту БВС и управляющий его работой. Бортовой компьютер БВС обеспечивает выдачу управляющих воздействий БВС, манипулятору, оборудованию, подсоединяемому к свободному концу манипулятора, а также осуществляет обмен информацией с автоматизированным рабочим местом (АРМ) оператора БВС.
Манипулятор - механизм для управления пространственным положением инструмента и картриджей с расходными материалами для выполнения СР, размещаемый на БВС.
Кассета БВС - конструкция, содержащая ячейки, которые в зависимости от возлагаемых на БВС задач комплектуются инструментом и/или картриджами с расходными материалами.
Под оператором в данном техническом решении понимается лицо, управляющее БВС, в частности, его полетом, работой манипулятора, выполнением операций СР, а также обеспечивающее взаимодействие БВС с ПСК. Оператор может определять качественный и количественный состав оборудования, которым комплектуется кассета БВС (в зависимости от поставленных задач), комплектовать данную кассету и оснащать ею БВС после комплектования. Оператор осуществляет управление БВС, взаимодействуя с бортовым компьютером БВС, со своего АРМ.
Способ проведения СР с использованием БВС, оснащенного манипулятором, показанный на фигуре 1, включает следующие шаги.
Шаг 1: комплектуют ячейки кассеты картриджами с расходными материалами и/или инструментом в соответствии с возлагаемыми на беспилотное воздушное судно задачами по проведению спасательных работ, причем одна из ячеек комплектуется захватом зажимного типа.
При получении сигнала о возникновении ЧС оператор БВС определяет перечень оборудования, необходимого для осуществления тех или иных операций СР.
В некоторых вариантах осуществления изобретения кассеты могут быть заранее укомплектованы оборудованием для выполнения тех или иных задач: медицинскими средствами и оборудованием, аварийно-спасательным инструментом, пожарно-техническими средствами, специальными приборами (радиационной и химической разведки и мониторинга окружающей среды).
Тем не менее, одна из ячеек кассеты всегда комплектуется захватом зажимного типа (см. фигуру 2). Такой вид захвата имеет широкую область применения, и при подсоединении его к свободному концу манипулятора может использоваться для удержания, перемещения каких-либо предметов, в том числе для устранения препятствий с путей эвакуации пострадавших.
В рамках предлагаемого решения предусматривается возможность выполнения следующих операций, касающихся оказания медицинской помощи, и оснащения БВС дефибриллятором и кассетой, комплектуемой медицинскими средствами и оборудованием.
Проведение инъекций пострадавшему.
Для этого одна из ячеек кассеты комплектуется инструментом (см. фигуру 3), содержащим:
- вращающийся барабан, вмещающий в себя набор шприцев с ампулами, содержащими готовые к применению инъекции препараты, из расчета один шприц с ампулой на одну камеру барабана;
- корпус, вмещающий в себя барабан, вращающую данный барабан платформу, поршень для ввода иглы шприца и содержимого ампулы в тело пострадавшего; причем сторона корпуса, противоположная платформе, имеет одно инъекционное отверстие, центр которого расположен на одной линии с линией движения поршня.
Путем вращения платформой барабана выбранный шприц устанавливается напротив инъекционного отверстия, после чего поступательным движения поршня игла шприца, а затем содержимое ампулы вводятся в тело пострадавшего.
В некоторых вариантах осуществления данного изобретения барабан может вмещать ампулы, содержащие обезболивающие препараты, и/или препараты-спазмолитики, и/или антигистаминные препараты.
Для извлечения данного инструмента из ячейки кассеты и последующего его применения оно подсоединяется к свободному концу манипулятора. Кроме того, предусматривается возможность извлечения шприцев с ампулами с тыльной стороны барабана (с предварительным отсоединением барабана от платформы, подсоединенной к манипулятору) пострадавшим или лицом, оказывающим медицинскую помощь пострадавшему, для самостоятельного (без помощи манипулятора) проведения инъекции.
Подача пострадавшему перорального препарата. Для этого одна из ячеек кассеты комплектуется емкостью с дозатором, содержащей порцию разбавленного питьевой жидкостью и готового к приему перорального препарата. Для извлечения емкости с пероральным препаратом из ячейки кассеты данная емкость подсоединяется к свободному концу манипулятора. В некоторых вариантах осуществления данного изобретения емкостями с препаратами могут комплектоваться несколько ячеек из расчета одна емкость на одну ячейку кассеты. Емкость, или емкости, могут содержать обезболивающие препараты, и/или препараты-спазмолитики, и/или антигистаминные препараты. Кроме того, предусматривается возможность снятия с манипулятора емкостей с препаратами пострадавшим или лицом, оказывающим медицинскую помощь пострадавшему, для приема препарата.
Размещение портативного регистратора электрокардиосигналов на теле пострадавшего.
Для этого одна из ячеек кассеты комплектуется контейнером, вмещающим в себя портативные регистраторы электрокардиосигналов. При этом портативные регистраторы электрокардиосигналов располагаются внутри контейнера один за другим, в порядке, подобном порядку размещения патронов в коробчатом магазине огнестрельного оружия: после размещения регистратора на теле пострадавшего очередной регистратор подается к выходному отверстию контейнера посредством находящегося в задней, противоположной выходному отверстию, части контейнера пружины. Поверхность портативных регистраторов электрокардиосигналов обработана самоклеящимся составом, что обеспечивает их размещение на теле пострадавшего и более плотный контакт регистратора с кожей.
В качестве портативных регистраторов электрокардиосигналов могут быть использованы устройства для регистрации электрокардиосигналов в условиях свободной двигательной активности, предложенные в [4]. В некоторых вариантах осуществления изобретения электрокардиосигналы, регистрируемые таким устройством, могут передаваться посредством цифрового модема, входящего в его состав, на ПЭВМ ПСК или врача, находящегося удаленно. Для извлечения контейнера из ячейки кассеты и последующего применения портативных регистраторов электрокардиосигналов контейнер подсоединяется к свободному концу манипулятора. Кроме того, предусматривается возможность извлечения портативного регистратора электрокардиосигналов из контейнера пострадавшим или лицом, оказывающим медицинскую помощь пострадавшему, для самостоятельного (без помощи манипулятора) приложения к телу пострадавшего данного регистратора.
Освобождение от одежды участков тела пострадавшего. Для этого одна из ячеек кассеты комплектуется режущим инструментом, лезвия которого имеют форму лезвий медицинских ножниц (тактических изогнутых тупоконечных). Изогнутая форма лезвий данного инструмента позволяет избежать травмирования кожи пострадавших; материал данного инструмента способен разрезать одежду, перевязочный материал, а также некоторые разновидности мягкого металла.
Данная операция может проводиться в целях подготовки пострадавшего к проведению дефибрилляции (электроды дефибриллятора необходимо прикладывать к оголенной грудной клетке), а также в случае запутывания пострадавшего в одежде.
Для извлечения данного инструмента из ячейки кассеты и последующего его применения оно подсоединяется к свободному концу манипулятора. Кроме того, предусматривается возможность снятия данного инструмента с манипулятора пострадавшим или лицом, оказывающим медицинскую помощь пострадавшему, для самостоятельного (без помощи манипулятора) освобождения тела пострадавшего от одежды или иных предметов.
Проведение дефибрилляции сердца пострадавшего. Для этого БВС комплектуется дефибриллятором, а одна из ячеек кассеты - единой накладкой с электродами. Перед проведением дефибрилляции накладка с электродами подсоединяется к свободному концу манипулятора и извлекается из ячейки кассеты; затем посредством манипулятора накладка с электродами подключается к дефибриллятору; после чего посредством манипулятора данная накладка с электродами прикладывается к телу пострадавшего. В некоторых вариантах осуществления изобретения несколько ячеек кассеты могут комплектоваться накладками с электродами из расчета одна накладка с двумя электродами на одну ячейку; причем накладки могут иметь отличные друг от друга размеры, а также электроды, размещенные в одной накладке, могут отличаться размерами и взаимным расположением от электродов, размещенных в других накладках: та или иная накладка с электродами может выбираться в зависимости от размеров грудной клетки пострадавшего. Накладка изготавливается из самоклеящегося материала, обеспечивающего плотный контакт электродов с кожей пострадавшего при их приложении. В качестве дефибриллятора может быть использован портативный дефибриллятор компании Zoll AED Plus (США) [5], который оборудован единой электродной накладкой, что упрощает процедуру правильного расположения электродов на теле пострадавшего (в отличие от дефибрилляторов, имеющих две раздельные накладки с электродами); кроме того, бифазный импульс данного дефибриллятора использует максимальную энергию 200 Дж, что позволяет ему быть столь же эффективным, как и его аналоги, использующие 360 Дж, но при этом данное устройство является более безопасным. Кроме того, предусматривается возможность снятия накладки с электродами дефибриллятора с манипулятора лицом, оказывающим медицинскую помощь пострадавшему, для самостоятельного (без помощи манипулятора) проведения дефибрилляции желудочков сердца пострадавшего.
Остановка кровотечения у пострадавшего. Для этого одна из ячеек кассеты комплектуется картриджем с компонентами, образующими при смешивании быстросохнущую полиуретановую пену, способную остановить кровотечение, а также инструментом, содержащим камеру для смешивания данных компонентов и иглу для нанесения получаемой пены, как на открытую рану, так и введения пены внутрь тела пострадавшего (в зависимости от характера кровотечения). Для извлечения данных инструмента и картриджа из ячейки кассеты и последующего их применения они подсоединяются к свободному концу манипулятора. Для остановки кровотечения может быть использовано средство, разработанное компанией Arsenal Medical (США) [6], состоящее из двух жидких компонентов, которые при смешивании образуют состав, увеличивающийся в размере, подобно монтажной пене, обволакивающий внутренние органы (при инъекции) и останавливающий кровотечение.
Для извлечения данных инструмента и картриджа из ячейки кассеты и последующего их применения они подсоединяются к свободному концу манипулятора. Кроме того, предусматривается возможность снятия картриджа инструмента с манипулятора пострадавшим или лицом, оказывающим медицинскую помощь пострадавшему, для самостоятельного (без помощи манипулятора) применения образуемого состава для остановки кровотечения.
Маркировка пострадавшего краской, выбираемой в соответствии с результатами проведенной медицинской сортировки. Для этого ячейка кассеты комплектуется картриджами с красками определенных цветов, каждый из которых соответствует одному из результатов медицинской сортировки, и инструментом, распыляющим такие краски в виде аэрозоля на тело и/или одежду пострадавшего. Картриджи с красками и инструмент для их нанесения подсоединяются к свободному концу манипулятора для извлечения данных картриджей и инструмента из ячейки кассеты и последующего применения. Кроме того, предусматривается возможность снятия с манипулятора картриджей с красками и инструмента для их нанесения лицом, оказывающим медицинскую помощь пострадавшему, для самостоятельной (без помощи манипулятора) маркировки пострадавшего.
Кроме того, в рамках предлагаемого решения предусматривается возможность выполнения следующих операций, касающихся обнаружения, и/или локализации, и/или ликвидации источников ЧС, и оснащения БВС набором датчиков-газоанализаторов, тепловизором и кассетой, комплектуемой аварийно-спасательным инструментом, пожарно-техническими средствами, специальными приборами (радиационной и химической разведки и мониторинга окружающей среды).
Проведение анализа воздушной среды на предмет качественного и количественного состава опасных веществ. Для этого БВС оснащается набором датчиков-газоанализаторов. Могут быть использованы продукты китайской компании Zhengzhou Winsen Electronics Technology Corp., Ltd, производящей широкий спектр полупроводниковых газоанализаторов, отличающихся малыми массой, размерами, энергопотреблением [7] и позволяющих определять концентрацию различных газов, в том числе метана, водорода, угарного газа, этанола, аммиака.
Поиск очагов горения. Для этого БВС оснащается тепловизором. Использование данного устройства позволяет осуществлять поиск в том числе и скрытых очагов горения, что способствует более быстрой локализации пожаров, сокращает время поиска возгораний и демонтажа строительных конструкций.
Устранение аварийно образовавшихся отверстий в технологических емкостях и трубопроводах. Для этого одна из ячеек кассеты комплектуется картриджем с герметизирующим составом и инструментом для фиксации в области аварийно образовавшегося отверстия данного состава. Так, например, известны способ устранения аварийно образовавшихся отверстий в емкостях, корпусах судов и устройство для его реализации [8]; суть упомянутого способа состоит в размещении по обе стороны от стенки, имеющей пробоину, двух зонтов, последующего прижатия к данной стенке зонтов вокруг образовавшейся пробоины и введении герметика в пространство между зонтами.
Обезвреживание свободно распространяющихся химически и/или биологически опасных веществ и/или дезактивация радиоактивных веществ. Для этого ячейка кассеты комплектуется инструментом, содержащим картридж с составом, обезвреживающим вышеупомянутые вещества, и устройство для распыления данного состава. В некоторых вариантах осуществления изобретения несколько ячеек кассеты могут комплектоваться инструментами, содержащими картриджи с различными составами, каждый из которых (составов) обезвреживает какой-либо определенный вид вышеупомянутых опасных веществ, из расчета один инструмент, содержащий один картридж с обезвреживающим составом и устройством для его распыления, на одну ячейку кассеты.
Тушение огня. Для этого ячейка кассеты комплектуется инструментом, содержащим картридж с огнетушащим составом и устройство для распыления такого состава. В некоторых вариантах осуществления данного изобретения несколько ячеек кассеты могут комплектоваться данным инструментом из расчета один инструмент на одну ячейку кассеты, причем картридж, или картриджи, с огнетушащим составом могут выбираться в зависимости от класса пожара.
Поиск металлических предметов, в том числе скрытой электропроводки. Для этого ячейка кассеты комплектуется металлоискателем, что позволяет осуществлять поиск находящихся в стенах и перекрытиях, грунте, воде металлические предметы.
Обрыв электрической цепи, перекусывание арматуры, перерезывание листовой обшивки. Для этого ячейка кассеты комплектуется гидравлическими ножницами.
Измерение уровней радиации на местности и радиоактивной зараженности различных предметов по ионизирующему излучению. Для этого ячейка кассеты комплектуется блоком детектирования ионизирующего излучения.
Предусматривается возможность съема личным составом ПСК с манипулятора аварийно-спасательного инструмента, пожарно-технических средств, которыми комплектуется кассета, для их самостоятельного (без помощи манипулятора) применения.
Шаг 2: оснащают БВС кассетой, укомплектованной на предыдущем шаге.
В данном техническом решении БВС реализовано в виде мультикоптера повышенной грузоподъемности, на котором установлен манипулятор и оборудован грузовой отсек.
В качестве такого мультикоптера может использоваться мультикоптер Volodrone, разработанный Volocopter GmbH (Германия) [9]. Данный мультикоптер оснащен восемнадцатью роторами, имеет общую грузоподъемность 200 кг и способен перемещать данный вес на расстояние 40 км. Мультикоптер с такой схемой размещения роторов изображен на фигуре 4.
По окончании комплектования кассеты ее помещают в корпус БВС. Для этого кассета оснащается каретками, обеспечивающими движение кассеты по направляющим, размещенным в грузовом отсеке БВС. В некоторых вариантах осуществления изобретения для помещения кассеты в грузовой отсек могут использоваться элементы конструкции метабокса. Вариант осуществления кассеты изображен на фигуре 5.
Шаг 3: осуществляют запуск беспилотного воздушного судна к месту выполнения задачи.
Запуск БВС осуществляется после размещения в его грузовом отсеке кассеты с оборудованием и ввода координат места проведения работ (полетного задания) в его бортовой компьютер.
Следование БВС в пункт назначения может осуществляться как в ручном (посредством управления оператором), так и в автоматическом режиме (под управлением бортового компьютера).
Поскольку вылет БВС в зону ЧС осуществляется через незначительное время после получения сигнала о возникновении ЧС, данное БВС прибывает к месту проведения работ раньше ПСК, передвигающейся наземным транспортом.
В случае оснащения БВС датчиками-газоанализаторами осуществляется, при необходимости, анализ воздушной среды на предмет качественного и количественного состава опасных веществ.
В случае оснащения БВС тепловизором осуществляется, при необходимости, поиск очагов горения посредством анализа получаемой данным тепловизором информации.
Шаг 4: осуществляют посадку беспилотного воздушного судна по прибытии к месту выполнения задачи.
Перед проведением большинства операций СР требуется посадка БВС. Это обусловлено необходимостью придания устойчивого положения БВС при работе с манипулятором.
Поскольку в рамках данного технического решения используется БВС вертикальных взлета и посадки, имеется возможность непосредственного приближения к месту проведения работ; возможность зависания БВС в воздухе. Кроме того, такое БВС обладает высокой маневренностью.
Шаг 5: подсоединяют к свободному концу манипулятора и извлекают из ячейки кассеты необходимый картридж с расходными материалами и/или инструмент.
Перед проведением какой-либо операции СР оператор выбирает ячейку кассеты, содержащую соответствующий картридж с расходными материалами и/или инструмент. Люк грузового отсека открывается, манипулятор переводится из походного положения в рабочее, при этом его свободный конец направляется к нужной ячейке, после чего осуществляется подсоединение содержимого данной ячейки к свободному концу манипулятора.
Затем извлекают из ячейки кассеты ее содержимое, подсоединенное к свободному концу манипулятора. При этом оператор управляет пространственным положением манипулятора, наблюдая на экране своего АРМ изображение, передаваемое камерами, размещенными на БВС.
Манипулятор может находиться в одном из двух положений: походном или рабочем. В походном положении манипулятор находится в закрытом грузовом отсеке, рядом с кассетой с оборудованием; в данное положение манипулятор переводят перед полетом БВС (см. фигуру 6). В рабочем положении значительная часть манипулятора находится вне грузового отсека БВС, к нему подсоединено оборудование, извлеченное из ячейки кассеты, положение его звеньев является оптимальным для проведения требуемой операции.
Манипулятор выполнен на основе [3], содержит устройство очувствления, выполненное на основе силомоментных датчиков, позволяющее определять усилие, действующее на инструмент во время проведения операции, и представляет собой последовательно соединенные с помощью вращательных кинематических пар подвижные звенья: звено ротации инструмента, звено качания инструмента, запястье, звено предплечья, звено плеча, звено качания плеча, поворотное звено, подсоединенное через неподвижное звено к платформе, находящейся внутри грузового отсека БВС; причем отличительной чертой предлагаемого изобретения является то, что звено плеча и звено предплечья манипулятора являются телескопическими: каждое из данных звеньев состоит из наружной секции и внутренней выдвижной секции, расположенной (в походном положении манипулятора) внутри наружной секции своего звена. Наружная секция каждого телескопического плеча с помощью кинематической пары соединена соответственно с предыдущим звеном: наружная секция плеча соединена со звеном качания плеча, наружная секция предплечья соединена с внутренней выдвижной секцией звена плеча (см. фигуру 7). Каждое из телескопических звеньев имеет электропривод поступательного движения, обеспечивающий выдвижение внутренней выдвижной секции из своей наружной секции.
Достоинством предлагаемого манипулятора является наличие телескопических звеньев: в рабочем положении выдвижение их внутренних выдвижных секций обеспечивает заметное увеличение длины манипулятора, что способствует увеличению рабочей зоны последнего (см. фигуру 8 а и б). И, наоборот, при переводе в походное положение обратное движение частей телескопических звеньев обеспечивает компактное размещение манипулятора в грузовом отсеке БВС, а также равномерное распределение нагрузки на борту последнего (в совокупности с кассетой БВС).
Такое устройство телескопических звеньев манипулятора ведет к увеличению числа степеней свободы по сравнению с прототипом [3] и их количество определяется согласно структурной формуле кинематической цепи Сомова-Малышева [10]:

где  - число кинематических пар соответственно пятого, четвертого, третьего, второго, первого класса;
- число кинематических пар соответственно пятого, четвертого, третьего, второго, первого класса;  - количество подвижных звеньев в механизме.
- количество подвижных звеньев в механизме.
Для вычисления числа степеней свободы механизма требуется из их общего числа  (поскольку каждое свободное звено имеет шесть степеней свободы) исключить то количество ограничений степеней свободы, какое возникает при соединении звеньев в кинематические пары. Предлагаемый манипулятор содержит две поступательные и семь вращательных кинематических пар, которые относятся к кинематическим парам пятого класса. Таким образом, в данном техническом решении манипулятор обладает девятью степенями свободы.
(поскольку каждое свободное звено имеет шесть степеней свободы) исключить то количество ограничений степеней свободы, какое возникает при соединении звеньев в кинематические пары. Предлагаемый манипулятор содержит две поступательные и семь вращательных кинематических пар, которые относятся к кинематическим парам пятого класса. Таким образом, в данном техническом решении манипулятор обладает девятью степенями свободы.
Для обеспечения электропитания подсоединяемого к свободному концу манипулятора устройства (располагающемуся в ячейках кассеты инструмента и/или картриджей с расходными материалами), выдачи данному устройству управляющих воздействий, обмена информацией бортового компьютера БВС с данным устройством свободный конец манипулятора и подсоединяемое к нему устройство оснащаются электрическим соединителем. При этом обмен информацией между бортовым компьютером БВС и устройством, подсоединенным к манипулятору, осуществляется посредством использования PowerLine-технологии [11].
В некоторых вариантах осуществления изобретения электрический соединитель выполнен в виде двух частей: вилки (расположена на свободном конце манипулятора) и розетки (расположена на подсоединяемом к манипулятору картриджу с расходными материалами и/или инструменту); кроме того, в некоторых вариантах осуществления изобретения свободный конец манипулятора для фиксации подсоединяемого к нему оборудования оснащен выдвигающимися захватами (см. фигуру 9 а и б).
Кроме того, некоторый инструмент и/или картриджи, о которых говорилось выше, могут отсоединяться от манипулятора для самостоятельного проведения некоторых операций пострадавшим или лицом, выполняющим некоторые операции СР.
Шаг 6: увеличивают рабочую зону манипулятора путем выдвижения внутренних выдвижных секций из наружных секций телескопических звеньев манипулятора.
После подсоединения инструмента и/или картриджа с расходными материалами к свободному концу манипулятора увеличивается рабочая зона последнего за счет выдвижения внутренних выдвижных секций из наружных секций телескопических звеньев плеча и предплечья на необходимую длину.
В каждом телескопическом звене содержится электропривод поступательного движения (см. фигуру 10), электродвигательное устройство которого закреплено на внутренней поверхности корпуса наружной секции. После получения управляющих воздействий электродвигательное устройство, преобразуя электрическую энергию в механическую, вращает винт, закрепленный внутри исполнительного органа - внутренней выдвижной секции, в результате чего последняя выдвигается из наружной секции.
Шаг 7: осуществляют соответствующую операцию, относящуюся к спасательным работам, управляя при этом посредством манипулятора пространственным положением присоединенного к нему картриджа с расходными материалами и/или инструмента.
Посредством наблюдения через видеокамеры, размещенные на БВС, управления пространственным положением устройства, подсоединенного к манипулятору, а также передачи данному устройству управляющих сигналов оператор осуществляет операцию СР.
Шаг 8: возвращают внутренние выдвижные секции телескопических звеньев манипулятора в исходное положение внутрь наружных секций.
По завершении проведения операции электроприводы телескопических звеньев манипулятора возвращают внутренние выдвижные секции в исходное положение (задвигают их), что способствует последующему возвращению инструмента и/или картриджей с расходными материалами в ячейку кассеты.
Шаг 9: возвращают в ячейку кассеты и отсоединяют от манипулятора использованный картридж с расходными материалами и/или инструмент.
После отсоединения использованного картриджа и/или инструмента освободившийся конец манипулятора направляется в другую ячейку для подсоединения содержащегося в ней устройства или, в том случае, если возлагаемый на данное БВС объем СР выполнен, осуществляется перевод манипулятора из рабочего положения в походное.
Шаг 10: при необходимости выполняют другие операции, относящиеся к спасательным работам, посредством манипулятора и соответствующих картриджей с расходными материалами и/или инструмента, повторяя действия, описанные на предыдущих пяти шагах.
В зависимости от объема поставленных задач БВС приступает к выполнению новой операции СР, повторяя действия с манипулятором и оборудованием, описанные на предыдущих пяти шагах (при необходимости - БВС меняет свое местоположение, направляясь к месту выполнения очередной задачи), или возвращается на исходную позицию.
Шаг 11: осуществляют возврат беспилотного воздушного судна на исходную позицию по окончании выполнения возложенных на него задач.
При этом БВС возвращается на исходную позицию под управлением оператора или бортового компьютера.
В некоторых вариантах осуществления изобретения по возвращении БВС осуществляется восполнение израсходованных материалов, кассета БВС доукомплектовывается и приводится в готовность к следующему применению БВС (в целях сокращения времени, необходимого для вылета БВС к зоне ЧС с момента получения сигнала о ней).
Таким образом, к числу достоинств предлагаемого технического решения можно отнести проведение широкого спектра операций СР без непосредственного участия человека и с использованием медицинских средств и оборудования, аварийно-спасательного инструмента, пожарно-технических средств, специальных приборов (радиационной и химической разведки и мониторинга окружающей среды) за счет использования манипулятора с девятью степенями свободы, из числа звеньев которого два звена являются телескопическими, установленного на БВС, оснащенном кассетой, укомплектованной оборудованием.
СПИСОК ИСТОЧНИКОВ
1. Newsru.com: [Электронный ресурс]. - Режим доступа: https://www.newsru.com/world/05jul2004/newrobot.html/, свободный - (28.07.2020).
2. Беспилотный летательный комплекс первой помощи : полезн. мод. к пат. 139238 Рос. Федерация : МПК A62B 99/00 / Богомолов А.В., Алёхин М.Д., Русскин А.В. ; заявители и патентообладатели Богомолов А.В., Алёхин М.Д., Русскин А.В. - № 2013151121/12 ; заявл. 18.11.2013 ; опубл. 10.04.2014 Бюл. № 10.
3. Описание полезной модели к патенту 135957 Российская Федерация, МПК B25J 11/00, A61B 17/062. Робот-манипулятор / Батанов А.Ф. и др., заявители и патентообладатели Министерство образования и науки, Закрытое акционерное общество «ЭКОИНВЕНТ». - №2013124984/02; заявл. 30.05.2013; опубл. 27.12.2013 Бюл. № 36. - 2 с.
4. Пат. 2540528 Российская Федерация, МПКA61B 5/0402. Устройство для регистрации электрокардиосигналов в условиях свободной двигательной активности / Бодин О.Н. и др., заявитель и патентообладатель Общество с ограниченной ответственностью (ООО) «Кардиовид». - №2013132637/14; заявл. 16.07.2013; опубл. 10.02.2015 Бюл. № 4. - 2 с.
5. Наилучшая помощь для спасения жизни [Электронный ресурс]. - Режим доступа: https://www.medplant.ru/otziv/russian_aed_plus_brochure.PDF, свободный - (28.07.2020).
6. MSiter.ru: [Электронный ресурс]. - Режим доступа: https://msiter.ru/news/razrabotana-pena-dlya-ostanovki-vnutrennih-krovotecheniy1, свободный - (28.07.2020).
7. Компэл: [Электронный ресурс]. - Режим доступа: https://www.compel.ru/lib/84967, свободный - (28.07.2020).
8. Пат. 2453467 Российская Федерация, МПКB63B 43/16. Способ устранения аварийно образовавшихся отверстий и устройство для его реализации / Парамошко В.А., заявитель и патентообладатель Парамошко В.А.. - №2008102029/11; заявл. 18.01.2008; опубл. 20.06.2012Бюл.№17.- 8 с.
9. Robroy.ru: [Электронный ресурс]. - Режим доступа: https://robroy.ru/volocopter-debyutiruet-s-gigantskim-dronom-volodrone.html, свободный - (28.07.2020).
10. Эльяш Н.Н. Теоретическая и прикладная механика: Электронное учебное пособие (курс лекций). В 2-х частях. / ФГАОУ ВПО «Рос. гос. проф.-пед. ун-т». Екатеринбург,2015. Часть 1. Теоретическая механика. 72 с.
11. Охрименко, В. PLC- технологии [Текст] / В. Охрименко // Электронные компоненты. - 2009. - №10. - С. 58-62.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ПРОВЕДЕНИЯ ПОИСКОВО-СПАСАТЕЛЬНЫХ РАБОТ | 2018 |
|
RU2694528C1 |
| Способ оказания экстренной кардиологической помощи и система для осуществления способа | 2020 |
|
RU2775688C2 |
| Мультиагентный робототехнический поисково-спасательный комплекс | 2021 |
|
RU2773987C1 |
| МОБИЛЬНЫЙ КОМПЛЕКС НАЗЕМНОЙ ПОИСКОВО-СПАСАТЕЛЬНОЙ КОМАНДЫ | 2018 |
|
RU2697003C1 |
| АВАРИЙНО-СПАСАТЕЛЬНАЯ МАШИНА | 2004 |
|
RU2252161C1 |
| АВАРИЙНО-СПАСАТЕЛЬНАЯ МАШИНА | 2005 |
|
RU2299819C1 |
| Способ проведения геологоразведочных работ с использованием беспилотных воздушных средств | 2022 |
|
RU2805015C1 |
| Способ многофункциональной аэросъемки на основе беспилотных воздушных судов для планирования и сопровождения сейсморазведочных работ и многофункциональный аппаратно-программный комплекс для его реализации | 2021 |
|
RU2779707C1 |
| РОБОТОТЕХНИЧЕСКИЙ РАЗВЕДЫВАТЕЛЬНЫЙ КОМПЛЕКС АМФИБИЙНЫЙ | 2017 |
|
RU2654898C1 |
| Способ поисковых и спасательных операций с помощью беспилотного воздушного судна | 2023 |
|
RU2818393C1 |
Изобретение относится к областям применения беспилотных воздушных судов и механических манипуляторов, в частности к способам проведения спасательных работ в условиях чрезвычайной ситуации c помощью беспилотных воздушных судов. Способ проведения спасательных работ с использованием беспилотного воздушного судна вертикальных взлета и посадки, работающего на электрическом аккумуляторе, оснащенного манипулятором и кассетой, ячейки которой укомплектованы инструментом и картриджами с расходными материалами, в котором комплектуют ячейки кассеты оборудованием; оснащают беспилотное воздушное судно кассетой; осуществляют запуск беспилотного воздушного судна к месту выполнения задачи; осуществляют посадку беспилотного воздушного судна по прибытии к месту; подсоединяют содержимое ячейки к свободному концу манипулятора; выдвигают внутренние выдвижные секции телескопических звеньев манипулятора; осуществляют операцию спасательных работ; возвращают внутренние выдвижные секции телескопических звеньев в исходное положение; возвращают в ячейку кассеты оборудование; осуществляют возврат беспилотного воздушного судна на исходную позицию. 2 н.п. ф-лы, 12 ил.
1. Способ проведения спасательных работ с использованием беспилотного воздушного судна вертикальных взлета и посадки, работающего на электрическом аккумуляторе, оснащенного манипулятором и съемной кассетой с ячейками, включающий следующие шаги:
– комплектуют ячейки кассеты инструментами, причем одна из ячеек комплектуется инструментом, представляющим собой захват зажимного типа;
– осуществляют запуск беспилотного воздушного судна к месту проведения спасательных работ;
– осуществляют посадку беспилотного воздушного судна по прибытии к месту проведения спасательных работ;
– подсоединяют к свободному концу манипулятора и извлекают из ячейки кассеты инструмент;
– увеличивают рабочую зону манипулятора путем выдвижения внутренних выдвижных секций из наружных секций телескопических звеньев манипулятора;
– осуществляют операцию, относящуюся к спасательным работам, управляя при этом посредством манипулятора пространственным положением присоединенного к нему инструмента;
– возвращают внутренние выдвижные секции телескопических звеньев манипулятора в исходное положение внутрь наружных секций;
– возвращают в ячейку кассеты и отсоединяют от манипулятора использованный инструмент;
– выполняют действия, описанные на предыдущих пяти шагах, для следующей операции;
– осуществляют возврат беспилотного воздушного судна на исходную позицию по окончании выполнения спасательных работ.
2. Беспилотное воздушное судно вертикальных взлета и посадки, работающее на электрическом аккумуляторе, для осуществления способа проведения спасательных работ, которое содержит следующие компоненты:
– манипулятор, представляющий собой последовательно соединенные с помощью вращательных кинематических пар подвижные звенья: звено ротации инструмента, звено качания инструмента, запястье, звено предплечья, звено плеча, звено качания плеча, поворотное звено, подсоединенное через неподвижное звено к платформе, находящейся внутри грузового отсека беспилотного воздушного судна, причем звено плеча и звено предплечья являются телескопическими и каждое из данных телескопических звеньев состоит из наружной секции и внутренней выдвижной секции;
– кассета, ячейки которой вмещают имеющий возможность подсоединения к свободному концу манипулятора инструмент, причем одна из ячеек укомплектована имеющим возможность подсоединения к свободному концу манипулятора захватом зажимного типа.
| Стабилизатор переменного тока | 1960 |
|
SU135957A1 |
| Конвейер лестничный пассажирский | 1960 |
|
SU139238A1 |
| УСТРОЙСТВО ДЛЯ РЕГИСТРАЦИИ ЭЛЕКТРОКАРДИОСИГНАЛОВ В УСЛОВИЯХ СВОБОДНОЙ ДВИГАТЕЛЬНОЙ АКТИВНОСТИ | 2013 |
|
RU2540528C1 |
| СПОСОБ УСТРАНЕНИЯ АВАРИЙНО ОБРАЗОВАВШИХСЯ ОТВЕРСТИЙ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2008 |
|
RU2453467C2 |
| МОБИЛЬНЫЙ КОМПЛЕКС БЕСПИЛОТНОГО ВОЗДУШНОГО МОНИТОРИНГА | 2015 |
|
RU2612754C1 |
| СПОСОБ ПРОВЕДЕНИЯ ПОИСКОВО-СПАСАТЕЛЬНЫХ РАБОТ | 2016 |
|
RU2622505C1 |
| СПОСОБ И КОМПЛЕКС СРЕДСТВ ОБНАРУЖЕНИЯ ЧРЕЗВЫЧАЙНОЙ СИТУАЦИИ И ЛИКВИДАЦИИ ЕЕ ПОСЛЕДСТВИЙ | 2004 |
|
RU2350368C2 |
| US 9915945 B2, 13.03.2018. | |||

