Изобретение относится к управляемым летательным аппаратам (ЛА) самолетной схемы, преимущественно к беспилотным ЛА с крылом большого удлинения.
Известны ЛА самолетной схемы, выводимые на траекторию взлета посредством стартово-разгонных ступеней (СРС) на базе твердотопливных либо жидкостных ракетных ускорителей (двигателей) - см., например, Н.Я. Василии «Беспилотные летательные аппараты», Мн., ООО «Попурри», 2003, стр. 25-29 (изделие Ла-17Р/РМ, СССР), стр. 32-35 (изделие «Пчела», СССР/РФ), стр. 36-59 (изделия Ту-123 «Ястреб», Ту-141 «Стриж», Ту-143 «Рейс», Ту-243 «Рейс-Д», СССР), стр. 76-81 (изделие AQM-34, США), стр. 91-96 (изделие BREVEL, Германия/Франция), стр. 103-105 (изделие CL-89, Канада), стр. 127-129 (изделие D-4/ASN-104, КНР), др. В данном случае основной задачей СРС является гарантированное достижение ЛА скорости выше минимальной полетной, когда на крыле формируется заданное значение подъемной силы, обеспечивающей устойчивый набор высоты и скорости ЛА во взлетном режиме.
Известен ЛА со складным крылом контейнерного базирования, при старте с нулевых направляющих и подъеме которого применяется мощная СРС, обеспечивающая в том числе преодоление т.н. «горба сопротивления» в зоне трансзвуковых скоростей - см., например, Г.А. Ефремов, А.И. Киселев, А.Г. Леонов и др. «Яркий след крылатого «Метеорита», М., издат. дом «Бедретдинов и Ко», 2012, с. 21 (компоновочная схема), стр. 94-97 (ближайший аналог).
Однако вышеперечисленные технические решения, во-первых, не обеспечивают какой-либо защиты ЛА на стартовом участке от скоростного напора воздуха, во-вторых, вследствие недобора высоты не позволяют ЛА сразу после окончания стартового участка оперативно переходить в штатный режим целевого функционирования, в-третьих, как правило, предполагают неспасаемые СРС.
Технической задачей предлагаемого изобретения является создание способа старта и подъема ЛА с крылом большого удлинения посредством СРС, при котором обеспечивается защита летательного аппарата от скоростного напора воздуха, выведение ЛА сразу на высоту целевого функционирования, в ряде случаев, спасение СРС для повторного (многоразового) использования.
Решение указанной технической задачи достигается тем, что крылатый летательный аппарат в стартовой конфигурации (со сложенным крылом) размещают и механически фиксируют внутри СРС, после старта связку СРС-ЛА выводят на высоту 0,5…25,0 км начала целевого функционирования ЛА, после срабатывания СРС разделение ЛА и СРС производят при значениях скоростного напора не более 4000 кг/м⋅с2, после чего осуществляют развертывание крыла ЛА в маршевую конфигурацию. При этом ракетный двигатель СРС размещают в ее головной или хвостовой части. В ряде случаев связку СРС-ЛА выполняют статически устойчивой и/или управляемой на всей траектории ее полета. В некоторых случаях СРС дополнительно снабжают тормозным парашютом, который вводят в воздушный поток при разделении СРС и ЛА. В ряде случаев СРС дополнительно снабжают спасательным парашютом, который раскрывают перед приземлением СРС на высоте не менее 100 м. Кроме того, в ряде случаев СРС дополнительно снабжают 1…4 баллонетами мягкой посадки, которые наддувают перед приземлением СРС, а также световой сигнализацией, которую активируют после разделения СРС и ЛА, и звуковой сигнализацией, которую активируют перед приземлением СРС.
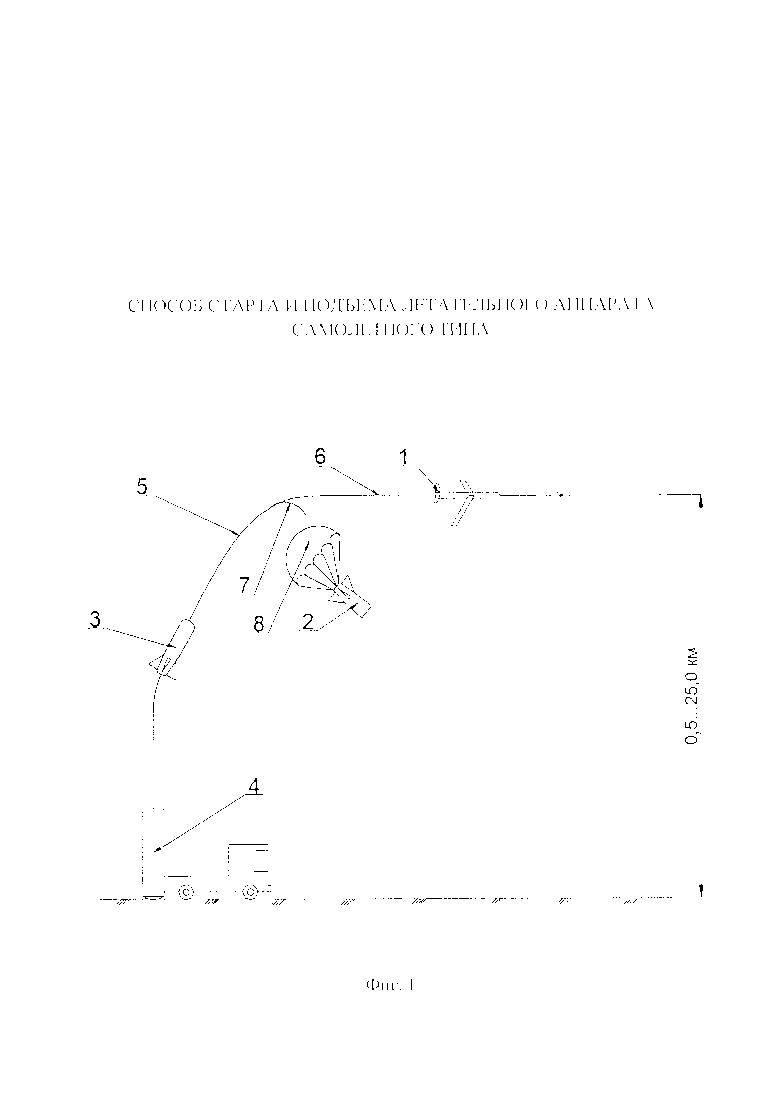
На фиг. 1 показана схема старта и подъема ЛА в составе связки СРС-ЛА на высоту целевого функционирования в рамках предлагаемого технического решения. Приняты обозначения:
1 - крылатый летательный аппарат в маршевой конфигурации;
2 - стартово-разгонная ступень (вариант);
3 - связка СРС-ЛА;
4 - пусковая установка (вариант);
5 - стартовый участок траектории полета связки СРС-ЛА;
6 - высота целевого функционирования ЛА (маршевая высота полета);
7 - траектория падения отработавшей СРС;
8 - тормозной парашют СРС (вариант).
Предложенное техническое решение может быть реализовано, например, следующим образом (см. фиг. 1). Летательный аппарат поз. 1 (с крылом большого удлинения, в том числе для полета на больших высотах) размещается в сложенном виде внутри СРС поз. 2. Связка СРС-ЛА поз. 3 устанавливается на пусковую установку поз. 4 (при этом СРС поз. 2 может выполнять роль транспортно-пускового контейнера ЛА поз. 1).
При получении команды на пуск связка СРС-ЛА поз. 3 переводится в заданное стартовое положение (например, наклонное или вертикальное). После старта с пусковой установки поз. 4 связка СРС-ЛА поз. 3 осуществляет ракетный набор высоты и скорости, например, по программной траектории стартового участка поз. 5. При этом стартово-разгонный ракетный двигатель (двигатели) может размещаться в головной или хвостовой части СРС поз. 2, а стабилизация связки СРС-ЛА поз. 3 может осуществляться за счет ее статически устойчивой балансировки и/или активного управления по каналам тангажа, курса и крена (например, аэродинамическими и/или газодинамическими органами управления СРС поз. 2).
При достижении (в том числе при движении по инерции) высоты целевого функционирования поз.6 (принята в диапазоне высот 0,5….25,0 км, где осуществляется выполнение абсолютного большинства целевых задач атмосферных ЛА с крылом большого удлинения) производится преобразование связки СРС-ЛА поз. 3 с разделением ЛА поз. 1 и СРС поз. 2. При этом - в силу определенной «слабости» конструкции ЛА поз. 1 с крылом большого удлинения и особенностей механики разделения длинномерных объектов в воздухе - диапазон скоростных напоров при разделении ЛА поз. 1 и СРС поз. 2 не должен превышать 4000 кг/м⋅c2 - (определяется, например, по бортовому приемнику воздушного давления). Следует отметить, что в этом случае при разделении объектов могут быть успешно применены тормозные парашютные системы (в частности, тормозной парашют поз. 8 СРС).
После разделения и развертывания крыла ЛА поз. 1 осуществляет маршевый полет в диапазоне высот целевого функционирования поз. 6 (например, в режиме дистанционного зондирования поверхности земли разноспектральными бортовыми сенсорами), а отработавшая СРС поз. 2 переходит на траекторию падения поз. 7.
С целью предупреждения соударения с другими летательными аппаратами, травматизации людей и животных на отработавшей СРС поз. 2 может включаться сигнализация - световая (которую активируют сразу после разделения СРС поз. 2 с ЛА поз. 1) и/или звуковая (которую активируют перед приземлением СРС поз. 2), а также задействуется спасательный парашют (перед приземлением СРС поз. 2 на высоте от поверхности земли не менее 100 м, что определяется, например, посредством бортового барометрического, лазерного либо радиовысотомера).
С целью минимизации посадочных перегрузок в момент касания земли СРС поз. 2 может дополнительно снабжаться 1…4 эластичными баллонетами мягкой посадки (которые наддуваются из сложенного состояния, например, холодным газом непосредственно перед приземлением).
Применение предложенного технического решения позволит оперативно выводить летательные аппараты с крылом большого удлинения на высоту целевого функционирования, при этом обеспечивать защиту (экранирование) ЛА от воздействия скоростного напора, а также осуществлять, в случае необходимости, спасение и многоразовое использование стартово-разгонных ступеней.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОБНАРУЖЕНИЯ МОРСКИХ ЦЕЛЕЙ | 2013 |
|
RU2554640C2 |
| СПОСОБ ОБНАРУЖЕНИЯ И ПОРАЖЕНИЯ ВОЗДУШНОЙ ЦЕЛИ РАКЕТНЫМ КОМПЛЕКСОМ | 2019 |
|
RU2718560C1 |
| МНОГОРАЗОВЫЙ РАКЕТНО-АВИАЦИОННЫЙ МОДУЛЬ И СПОСОБ ЕГО ВОЗВРАЩЕНИЯ НА КОСМОДРОМ | 2010 |
|
RU2442727C1 |
| СВЕРХЗВУКОВАЯ РАКЕТА | 2017 |
|
RU2686567C2 |
| ПЛАНИРУЮЩИЙ КОСМИЧЕСКИЙ АППАРАТ (ВАРИАНТЫ) СО СТВОРЧАТЫМ ГОЛОВНЫМ ОБТЕКАТЕЛЕМ И СПОСОБ УПРАВЛЕНИЯ ЕГО ВОЗВРАЩЕНИЕМ НА АЭРОДРОМ | 2011 |
|
RU2479469C1 |
| РАКЕТА-НОСИТЕЛЬ | 2011 |
|
RU2482030C2 |
| МНОГОФУНКЦИОНАЛЬНЫЙ МАЛОГАБАРИТНЫЙ ТРАНСФОРМИРУЕМЫЙ МНОГОРАЗОВЫЙ БЕСПИЛОТНЫЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ В ТРАНСПОРТНО-ПУСКОВОМ КОНТЕЙНЕРЕ И СПОСОБЫ СТАРТА | 2022 |
|
RU2778177C1 |
| Многоразовый беспилотный летательный аппарат в транспортно-пусковом контейнере и способ старта многоразового беспилотного летательного аппарата из транспортно-пускового контейнера | 2019 |
|
RU2714616C1 |
| СПОСОБ ПРОВЕДЕНИЯ МАРШРУТНОЙ АЭРОСЪЕМКИ | 2002 |
|
RU2213326C1 |
| СПОСОБ ВЫВЕДЕНИЯ ПОЛЕЗНОЙ НАГРУЗКИ В КОСМОС МНОГОРАЗОВОЙ ТРАНСПОРТНО-КОСМИЧЕСКОЙ СИСТЕМОЙ (ВАРИАНТЫ) | 2006 |
|
RU2331551C2 |
Изобретение относится к области авиации, в частности к системам запуска летательных аппаратов (ЛА) самолетной схемы. Способ старта и подъема летательного аппарата самолетного типа включает размещение ЛА и фиксацию в стартовой конфигурации со сложенным крылом внутри ракетной стартово-разгонной ступени (СРС), после старта связку СРС-ЛА выводят на высоту 0,5…25,0 км начала целевого функционирования ЛА. После срабатывания СРС разделяют ЛА и СРС при значениях скоростного напора не более 4000 кг/м⋅с2, после чего осуществляют развертывание крыла ЛА в маршевую конфигурацию. При этом ракетный двигатель СРС размещают в ее головной или хвостовой части. Связку СРС-ЛА выполняют статически устойчивой и/или управляемой на всей траектории ее полета. Обеспечивается вывод летательных аппаратов с крылом большого удлинения на высоту целевого функционирования и их защита (экранирование) от воздействия скоростного напора. 8 з.п. ф-лы, 1 ил.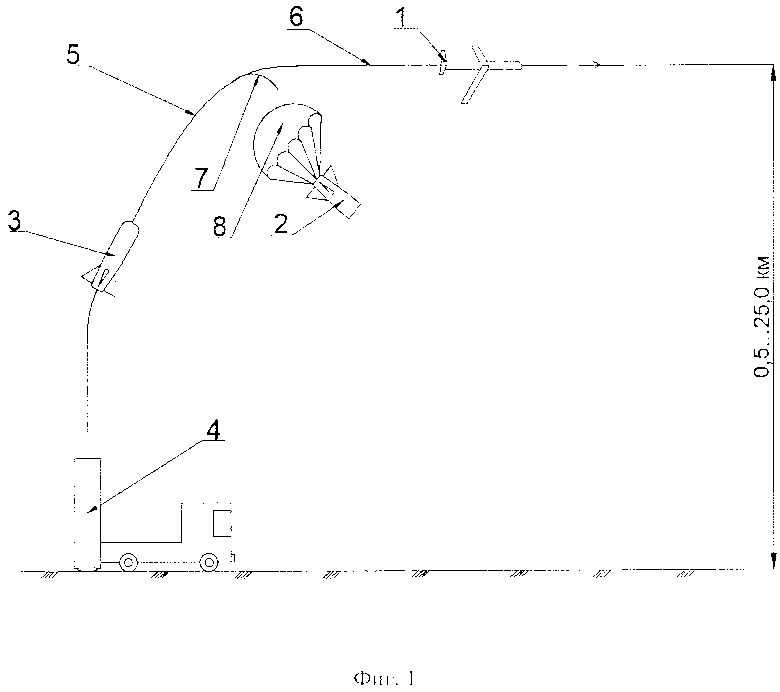
1. Способ старта и подъема летательного аппарата (ЛА) самолетного типа посредством ракетной стартово-разгонной ступени (СРС), включающий механическое скрепление ЛА со сложенным крылом и СРС в связку, старт с нулевых направляющих связки СРС-ЛА и ее разгон в воздухе при помощи СРС, разделение ЛА с отработавшей СРС, отличающийся тем, что ЛА со сложенным крылом размещают и фиксируют внутри СРС, после старта связку СРС-ЛА выводят на высоту 0,5…25,0 км начала целевого функционирования ЛА, после срабатывания СРС при достижении скоростного напора не более 4000 кг/м⋅с2 производят разделение ЛА и СРС, после чего осуществляют раскрытие крыла ЛА в маршевую конфигурацию.
2. Способ старта и подъема ЛА самолетного типа посредством ракетной СРС по п. 1, отличающийся тем, что ракетный двигатель СРС размещают в ее головной или хвостовой части.
3. Способ старта и подъема ЛА самолетного типа посредством ракетной СРС по п. 1, отличающийся тем, что связку СРС-ЛА выполняют статически устойчивой на всей траектории ее полета.
4. Способ старта и подъема ЛА самолетного типа посредством ракетной СРС по п. 1, отличающийся тем, что связкой СРС-ЛА управляют на всей траектории ее полета.
5. Способ старта и подъема ЛА самолетного типа посредством ракетной СРС по п. 1, отличающийся тем, что при разделении ЛА и СРС осуществляют дополнительное торможение СРС при помощи тормозного парашюта, который вводят в воздушный поток.
6. Способ старта и подъема ЛА самолетного типа посредством ракетной СРС по п. 1, отличающийся тем, что СРС дополнительно снабжают спасательным парашютом, который раскрывают перед ее приземлением на высоте не менее 100 м.
7. Способ старта и подъема ЛА самолетного типа посредством ракетной СРС по п. 6, отличающийся тем, что СРС дополнительно снабжают не более чем 4 баллонетами мягкой посадки, которые наддувают перед приземлением СРС.
8. Способ старта и подъема ЛА самолетного типа посредством ракетной СРС по п. 6, отличающийся тем, что СРС дополнительно снабжают световой сигнализацией, которую активируют после разделения СРС с ЛА.
9. Способ старта и подъема ЛА самолетного типа посредством ракетной СРС по п. 8, отличающийся тем, что СРС дополнительно снабжают звуковой сигнализацией, которую активируют перед приземлением СРС.
| Многорежимный гиперзвуковой беспилотный аппарат "Молот" [он-лайн], интернет-портал "Военное обозрение", 04.02.2017 [найдено 15.05.2019] | |||
| Глубинный насос | 1956 |
|
SU108251A1 |
| СПОСОБ ПУСКА БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА И РЕАКТИВНЫЙ КОМПЛЕКС ДЛЯ ЕГО РЕАЛИЗАЦИИ (ВАРИАНТЫ) | 2012 |
|
RU2507468C2 |
| WO 2009138787 A1, 19.11.2009 | |||
| US 6576880 B2, 10.06.2003. | |||

