Изобретения относятся к области приборостроения и могут найти применение в бортовых системах угловой стабилизации летательных аппаратов (ЛА), подверженных влиянию нежелательных и неконтролируемых внешних возмущений.
Известные способы формирования систем управления для стабилизации углового положения ЛА по крену содержат сигналы измерения угла и угловой скорости по крену, сигналы измерения угла отклонения элеронов, сигналы формирования динамических параметров, сигналы формирования управляющих воздействий на исполнительные приводы ЛА [1].
Известные устройства для реализации таких систем содержат в своем составе датчики угла и угловой скорости по крену, датчики угла отклонения элеронов, задатчик постоянных параметров, блоки умножения, деления, суммирования [1, 2, 3].
Недостатками такой реализации являются ограниченность возможностей управления и невысокая динамическая точность при воздействии на нестационарный ЛА ветровых и иных неконтролируемых возмущений.
Наиболее близким к предлагаемому изобретению является способ формирования сигнала управления в канале крена нестационарного ЛА, заключающийся в том, что измеряют текущий сигнал углового положения ЛА по крену, измеряют сигнал угловой скорости ЛА по крену, измеряют сигнал углового положения элеронов, формируют сигналы оценок динамических параметров  ,
,  , задают постоянные сигналы L1, L2, формируют сигнал в виде суммы трех сигналов, поделенный на сигнал оценки
, задают постоянные сигналы L1, L2, формируют сигнал в виде суммы трех сигналов, поделенный на сигнал оценки  , причем первый сигнал получают усилением измеренного сигнала угла крена с коэффициентом L1, второй сигнал получают усилением с коэффициентом L2 сигнала угловой скорости ЛА, третий сигнал получают путем усиления с коэффициентов
, причем первый сигнал получают усилением измеренного сигнала угла крена с коэффициентом L1, второй сигнал получают усилением с коэффициентом L2 сигнала угловой скорости ЛА, третий сигнал получают путем усиления с коэффициентов  сигнала угловой скорости ЛА, формируют сигнал z(t) путем деления суммарного сигнала е(t) на сигнал оценки динамического параметра
сигнала угловой скорости ЛА, формируют сигнал z(t) путем деления суммарного сигнала е(t) на сигнал оценки динамического параметра  и формируют выходной сигнал u(t) посредством ограничения и инвертирования сигнала z(t) [3].
и формируют выходной сигнал u(t) посредством ограничения и инвертирования сигнала z(t) [3].
Наиболее близким устройством, реализующим предложенный способ, является устройство, содержащее измеритель углового положения по крену, измеритель угловой скорости по крену, измеритель углового положения элеронов, первый задатчик параметров, блок формирования динамических параметров, первый, второй и третий блоки умножения, первый блок суммирования, блок деления и блок ограничения-инвертирования, первый выход измерителя углового положения по крену соединен с первым входом первого блока умножения, второй вход которого соединен с первым выходом задатчика параметров, первый выход измерителя угловой скорости по крену соединен с первым входом второго блока умножения, второй вход которого соединен со вторым выходом первого задатчика параметров, первый выход блока формирования динамических параметров соединен с первым входом третьего блока умножения, второй вход которого соединен с первым выходом измерителя угловой скорости по крену, выходы первого, второго и третьего блоков умножения соединены соответственно с первым, вторым и третьим входами первого блока суммирования, выход которого соединен с первым входом блока деления, второй вход (делитель) которого соединен со вторым выходом блока формирования динамических параметров, выход блока деления соединен со входом блока ограничения-инвертирования [3].
Недостатками известных способа и устройства для его реализации являются ограниченные функциональные возможности и снижение динамической точности из-за нежелательных отклонений угла крена, вызванных неконтролируемыми внешними возмущениями.
Техническая задача, решаемая изобретением, состоит в расширении функциональных возможностей и повышении динамической точности управления в канале крена ЛА за счет ослабления влияния неконтролируемых внешних возмущений на отклонения по углу крена.
Указанный технический результат достигается тем, что в известном способе формирования сигнала управления ЛА, заключающемся в том, что измеряют текущий сигнал углового положения летательного аппарата, измеряют сигнал угловой скорости летательного аппарата, формируют сигналы оценок  ,
,  динамических параметров, задают постоянные сигналы L1, L2, формируют суммарный сигнал е(t) из трех сигналов, при этом первый сигнал е1(t) в составе суммы получают усилением с коэффициентом L1 измеренного сигнала угла крена, второй сигнал е2(t) - усилением с коэффициентом L2 сигнала угловой скорости летательного аппарата, третий сигнал е3(t) - усилением с коэффициентом
динамических параметров, задают постоянные сигналы L1, L2, формируют суммарный сигнал е(t) из трех сигналов, при этом первый сигнал е1(t) в составе суммы получают усилением с коэффициентом L1 измеренного сигнала угла крена, второй сигнал е2(t) - усилением с коэффициентом L2 сигнала угловой скорости летательного аппарата, третий сигнал е3(t) - усилением с коэффициентом  сигнала угловой скорости летательного аппарата, измеряют сигнал углового положения элеронов, формируют сигнал z(t) путем деления суммарного сигнала е(t) на сигнал оценки динамического параметра
сигнала угловой скорости летательного аппарата, измеряют сигнал углового положения элеронов, формируют сигнал z(t) путем деления суммарного сигнала е(t) на сигнал оценки динамического параметра  и формируют выходной сигнал u(t) посредством ограничения и инвертирования сигнала z(t), дополнительно формируют сигнал оценки внешнего возмущения
и формируют выходной сигнал u(t) посредством ограничения и инвертирования сигнала z(t), дополнительно формируют сигнал оценки внешнего возмущения  посредством формирования обобщенного сигнала
посредством формирования обобщенного сигнала  , состоящего из суммы трех дополнительных сигналов g1(t), g2(t) и d(t), при этом первый сигнал g1(t) получают усилением измеренного сигнала угла крена с коэффициентом С1, второй сигнал g2(t) - усилением с коэффициентом
, состоящего из суммы трех дополнительных сигналов g1(t), g2(t) и d(t), при этом первый сигнал g1(t) получают усилением измеренного сигнала угла крена с коэффициентом С1, второй сигнал g2(t) - усилением с коэффициентом  сигнала угловой скорости летательного аппарата, третий сигнал d(t) - усилением с коэффициентом
сигнала угловой скорости летательного аппарата, третий сигнал d(t) - усилением с коэффициентом  сигнала угла элеронов, фильтруют обобщенный сигнал
сигнала угла элеронов, фильтруют обобщенный сигнал  с использованием динамического звена второго порядка с постоянными параметрами C1, C2 и формируют первый F1(t) и второй F2(t) выходные сигналы этого звена так, чтобы сигнал F2(t) являлся производной сигнала F1(t), а начальные значения F1(0), F1(0) совпадали соответственно с начальными измеренными значениями угла крена γ(0) и угловой скорости ω(0) формируют сигнал S1(t) путем вычитания сигнала F1(t) из измеренного сигнала угла крена γ(t), формируют сигнал S2(t) путем вычитания сигнала F2(t) из измеренного сигнала угловой скорости ω(t) по крену, получают сигнал w1(t) путем усиления с коэффициентом C1 сигнала S1(t), получают сигнал w2(t) путем усиления с коэффициентом C2 сигнала S2(t), формируют сигнал оценки
с использованием динамического звена второго порядка с постоянными параметрами C1, C2 и формируют первый F1(t) и второй F2(t) выходные сигналы этого звена так, чтобы сигнал F2(t) являлся производной сигнала F1(t), а начальные значения F1(0), F1(0) совпадали соответственно с начальными измеренными значениями угла крена γ(0) и угловой скорости ω(0) формируют сигнал S1(t) путем вычитания сигнала F1(t) из измеренного сигнала угла крена γ(t), формируют сигнал S2(t) путем вычитания сигнала F2(t) из измеренного сигнала угловой скорости ω(t) по крену, получают сигнал w1(t) путем усиления с коэффициентом C1 сигнала S1(t), получают сигнал w2(t) путем усиления с коэффициентом C2 сигнала S2(t), формируют сигнал оценки  внешнего возмущения путем суммирования сигналов w1(t) и w2(t), прибавляют сформированный сигнал
внешнего возмущения путем суммирования сигналов w1(t) и w2(t), прибавляют сформированный сигнал  к сумме е(t) сигналов е1(t), е2(t), е3(t).
к сумме е(t) сигналов е1(t), е2(t), е3(t).
Указанный технический результат достигается и тем, что в известное устройство, содержащее измеритель углового положения ЛА по крену, измеритель угловой скорости по крену, измеритель углового положения элеронов, первый задатчик параметров, блок формирования динамических параметров, первый, второй и третий блоки умножения, первый блок суммирования, блок деления и блок ограничения-инвертирования, выход которого является входом на исполнительное устройство ЛА, при этом первый выход измерителя углового положения по крену соединен с первым входом первого блока умножения, второй вход которого соединен с первым выходом первого задатчика параметров, первый выход измерителя угловой скорости по крену соединен с первым входом второго блока умножения, второй вход которого соединен со вторым выходом первого задатчика параметров, первый выход блока формирования динамических параметров соединен с первым входом третьего блока умножения, второй вход которого соединен с первым выходом измерителя угловой скорости по крену, выходы первого, второго и третьего блоков умножения соединены соответственно с первым, вторым и третьим входами первого блока суммирования, выход которого соединен с первым входом блока деления, второй вход которого соединен со вторым выходом блока формирования динамических параметров, выход блока деления соединен со входом блока ограничения-инвертирования, выход которого является выходом устройства, дополнительно введены второй задатчик параметров, первый блок вычитания, четвертый, пятый и шестой блоки умножения, второй блок суммирования, блок фильтрации, блок оценивания возмущения, при этом первый выход измерителя углового положения по крену соединен с первым входом четвертого блока умножения, второй вход которого соединен с первым выходом второго задатчика параметров, второй выход второго задатчика параметров соединен со вторым входом первого блока вычитания, первый вход которого соединен с первым выходом блока формирования динамических параметров, выход первого блока вычитания соединен со вторым входом пятого блока умножения, первый вход которого соединен с первым выходом измерителя угловой скорости по крену, выход измерителя углового положения элеронов соединен со вторым входом шестого блока умножения, первый вход которого соединен со вторым выходом блока формирования динамических параметров, выходы четвертого, пятого и шестого блоков умножения соединены соответственно с первым, вторым и третьим входами второго блока суммирования, выход которого соединен с первым сигнальным входом блока фильтрации, второй и третий параметрические входы которого соединены соответственно с первым и вторым выходами второго задатчика параметров, а четвертый и пятый параметрические входы - со вторыми параметрическими выходами измерителей углового положения и угловой скорости крена соответственно, первый и второй выходы блока фильтрации соединены соответственно с первым и вторым сигнальными входами блока оценивания возмущения, третий и четвертый параметрические входы которого соединены соответственно с первым и вторым выходами второго задатчика параметров, а пятый и шестой сигнальные входы - с первыми сигнальными выходами измерителей углового положения и угловой скорости крена соответственно, выход блока оценивания возмущения присоединен к четвертому входу первого блока суммирования. При этом блок фильтрации содержит последовательно соединенные третий блок суммирования, второй и первый интеграторы-усилители и первый блок умножения-инвертирования, а также второй блок умножения-инвертирования, первый сигнальный вход которого соединен с выходом второго интегратора-усилителя, а выход - с третьим входом третьего блока суммирования, выход первого блока умножения-инвертирования соединен со вторым входом третьего блока суммирования, вторые параметрические входы первого и второго интеграторов-усилителей являются соответственно четвертым и пятым параметрическими входами блока фильтрации, вторые параметрические входы первого и второго умножителей-инверторов являются соответственно вторым и третьим параметрическими входами блока фильтрации, выходы первого и второго интеграторов-усилителей являются соответственно первым и вторым выходами блока фильтрации. Вместе с тем, блок оценивания возмущения содержит второй и третий блоки вычитания, седьмой и восьмой блоки умножения и четвертый блок суммирования, при этом первый вход второго блока вычитания и первый вход третьего блока вычитания являются соответственно пятым и шестым сигнальными входами блока оценивания возмущения, а второй вход второго блока вычитания и второй вход третьего блока вычитания являются соответственно первым и вторым выходами блока фильтрации, выходы второго и третьего блоков вычитания соединены соответственно с первыми сигнальными входами седьмого и восьмого блоков умножения, вторые параметрические входы которых являются третьим и четвертым параметрическими входами блока оценивания возмущения, выходы седьмого и восьмого блоков умножения соединены соответственно с первым и вторым входами четвертого блока суммирования, выход которого является выходом блока оценивания возмущения.
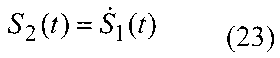
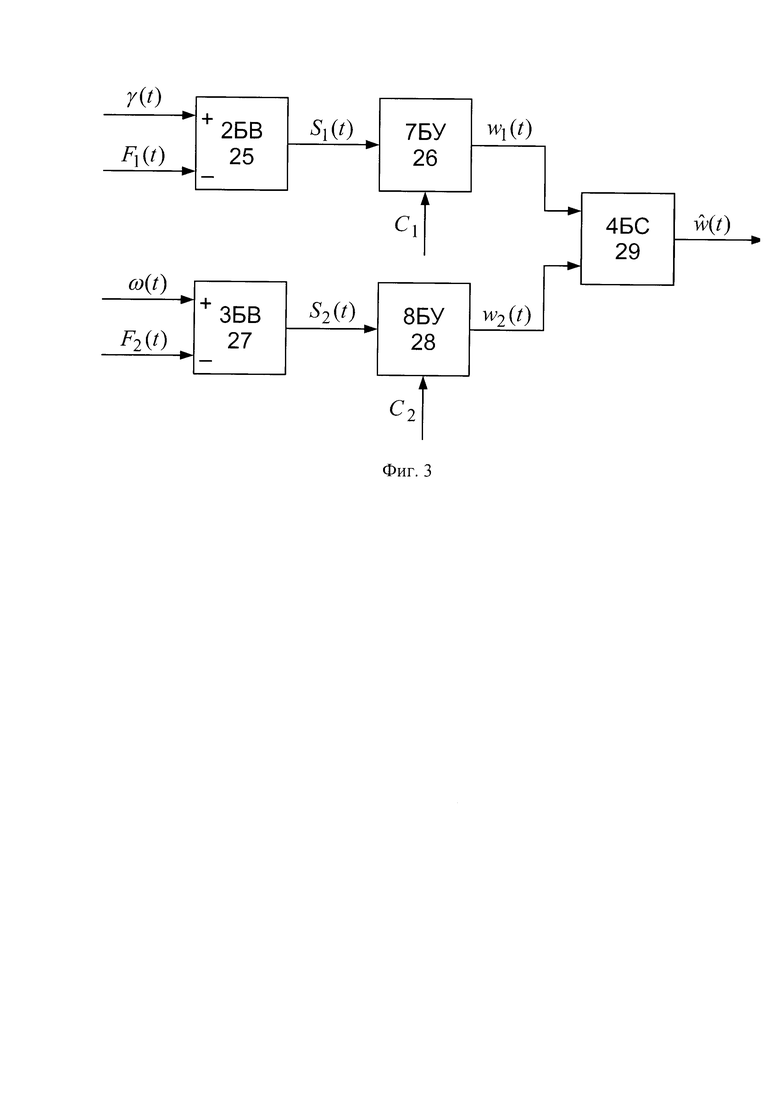
На фиг. 1 представлена блок-схема устройства формирования сигнала стабилизации с оценкой и компенсацией внешнего возмущения, реализующая предложенный способ; на фиг. 2 - структурная схема блока фильтрации; на фиг. 3 - структурная схема блока оценивания возмущения; на фиг. 4 - статическая характеристика блока ограничения-интегрирования.
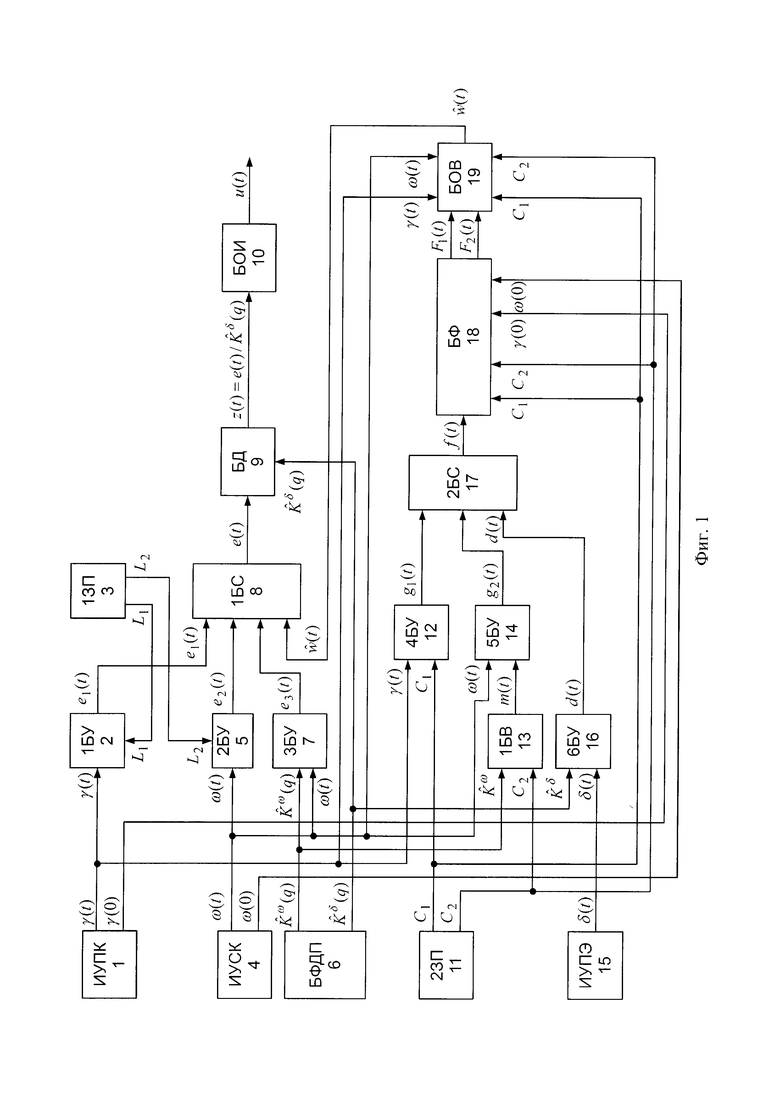
Устройство формирования сигнала стабилизации с оценкой и компенсацией внешнего возмущения в канале управления креном ЛА (фиг. 1) содержит измеритель углового положения по крену 1 (ИУПК), первый блок умножения 2 (1БУ), первый задатчик параметров 3 (1 ЗП), измеритель угловой скорости по крену 4 (ИУСК), измеритель углового положения элеронов 15 (ИУПЭ), второй блок умножения 5 (2БУ), блок формирования динамических параметров 6 (БФДП), третий блок умножения 7 (ЗБУ), первый блок суммирования 8 (1БС), блок деления 9 (БД), блок ограничения-инвертирования 10 (БОИ), выход которого является входом на исполнительное устройство (на чертеже не показано) летательного аппарата, второй задатчик параметров 11 (2 ЗП), четвертый блок умножения 12 (4БУ), первый блок вычитания 13 (1БВ), пятый блок умножения 14 (БВУ), шестой блок умножения 16 (6БУ), второй блок суммирования 17 (2БС), блок фильтрации 18 (БФ), блок оценивания возмущения 19 (БОВ), при этом первый выход измерителя углового положения по крену 1 (ИУПК) соединен с первым входом первого блока умножения 2 (1БУ), второй вход которого соединен с первым выходом первого задатчика параметров 3 (1 ЗП), первый выход измерителя угловой скорости по крену 4 (ИУСК) соединен с первым входом второго блока умножения 5 (2БУ), второй вход которого соединен со вторым выходом первого задатчика параметров 3 (1 ЗП), первый выход блока формирования динамических параметров 6 (БФДП) соединен с первым входом третьего блока умножения 7 (3БУ), второй вход которого соединен с первым выходом измерителя угловой скорости по крену 4 (ИУСК), выходы первого 2 (1БУ), второго 5 (2БУ) и третьего 7 (ЗБУ) блоков умножения соединены соответственно с первым, вторым и третьим входами первого блока суммирования 8 (1БС), выход которого соединен с первым входом блока деления 9 (БД), второй вход которого соединен со вторым выходом блока формирования динамических параметров 6 (БФДП), выход блока деления 9 (БД) соединен со входом блока ограничения-инвертирования 10 (БОИ), первый выход измерителя углового положения по крену 1 (ИУПК) соединен с первым входом четвертого блока умножения 12 (4БУ), второй вход которого соединен с первым выходом второго задатчика параметров 11 (2 ЗП), второй выход второго задатчика параметров 11 (2 ЗП) соединен со вторым входом первого блока вычитания 13 (1БВ), первый вход которого соединен с первым выходом блока формирования динамических параметров 6 (БФДП), выход первого блока вычитания 13 (1БВ) соединен со вторым входом пятого блока умножения 14 (5БУ), первый вход которого соединен с первым выходом измерителя угловой скорости по крену 4 (ИУСК), выход измерителя углового положения элеронов 15 (ИУПЭ) соединен со вторым входом шестого блока умножения 16 (6БУ), первый вход которого соединен со вторым выходом блока формирования динамических параметров 6 (БФДП), выходы четвертого 12 (4БУ), пятого 14 (5БУ) и шестого 16 (6БУ) блоков умножения соединены соответственно с первым, вторым и третьим входами второго блока суммирования 17 (2БС), выход которого соединен с первым сигнальным входом блока фильтрации 18 (БФ), второй и третий параметрические входы которого соединены соответственно с первым и вторым выходами второго задатчика параметров 11 (2 ЗП), а четвертый и пятый параметрические входы - со вторыми параметрическими выходами измерителей углового положения 1 (ИУПК) и угловой скорости крена 4 (ИУСК) соответственно, первый и второй выходы блока фильтрации 18 (БФ) соединены соответственно с первым и вторым сигнальными входами блока оценивания возмущения 19 (БОВ), третий и четвертый параметрические входы которого соединены с первым и вторым выходами второго задатчика параметров 11 (2 ЗП), а пятый и шестой сигнальные входы - с первыми сигнальными выходами измерителей углового положения 1 (ИУПК) и угловой скорости крена 4 (ИУСК) соответственно, выход блока оценивания возмущения 19 (БОВ) присоединен к четвертому входу первого блока суммирования 8 (1БС). Блок фильтрации 18 (БФ) (фиг. 2) содержит последовательно соединенные третий блок суммирования 20 (3БС), второй интегратор-усилитель 22 (2ИУ), первый интегратор-усилитель 21 (1ИУ) и первый блок умножения-инвертирования 23 (1БУИ), а также второй блок умножения-инвертирования 24 (2БУИ), первый сигнальный вход которого соединен с выходом второго интегратора-усилителя 22 (2ИУ), а выход - с третьим входом третьего блока суммирования 20 (ЗБС), выход первого блока умножения-инвертирования 23 (1БУ) соединен со вторым входом третьего блока суммирования 20 (3БС), вторые параметрические входы первого 21 (1ИУ) и второго 22 (2ИУ) интеграторов-усилителей являются соответственно четвертым и пятым параметрическими входами блока фильтрации 18 (БФ), вторые параметрические входы первого 23 (1БУИ) и второго 24 (2БУИ) умножителей-инверторов являются соответственно вторым и третьим параметрическими входами блока фильтрации 18 (БФ), выходы первого 21 (1ИУ) и второго 22 (2ИУ) интеграторов-усилителей являются соответственно первым и вторым выходами блока фильтрации 18 (БФ). Блок оценивания возмущения 19 (БОВ) (фиг. 3) содержит второй блок вычитания 25 (2БВ), седьмой блок умножения 26 (7БУ), третий блок вычитания 27 (3БВ), восьмой блок умножения 28 (8БУ), четвертый блок суммирования 29 (4БС), при этом первый вход второго блока вычитания 25 (2БВ) и первый вход третьего блока вычитания 27 (3БВ) являются соответственно пятым и шестым сигнальными входами блока оценивания возмущения 19 (БОВ), а второй вход второго блока вычитания 25 (2БВ) и второй вход третьего 27 (3Б) блока вычитания являются соответственно первым и вторым выходами блока фильтрации 18 (БФ), выходы второго 25 (2БВ) и третьего 27 (3БВ) блоков вычитания соединены соответственно с первыми сигнальными входами седьмого 26 (7БУ) и восьмого 28 (8БУ) блоков умножения, вторые параметрические входы которых являются третьим и четвертым параметрическими входами блока оценивания возмущения 19 (БО), выходы седьмого 26 (7БУ) и восьмого 28 (8БУ) блоков умножения соединены соответственно с первым и вторым входами четвертого блока суммирования 29 (4БС), выход которого является выходом блока оценивания возмущения 19 (БОВ).
Обозначения входных и выходных сигналов, принятые на фиг. 1-4:
γ(t), γ(0) - сигнальный и параметрический выходы измерителя углового положения по крену 1 (ИУПК);
е1(t) - выход первого блока умножения 2 (1БУ);
L1, L2 - параметрические выходы первого задатчика параметров 3 (1 ЗП);
ω(t), ω(0) - сигнальный и параметрический выходы измерителя угловой скорости по крену 4 (ИУСК);
е2(t) - выход второго блока умножения 5 (2БУ);
 ,
,  - параметрические выходы блока формирования динамических параметров 6 (БФДП);
- параметрические выходы блока формирования динамических параметров 6 (БФДП);
е3(t) - выход третьего блока умножения 7 (3БУ);
е(t) - выход первого блока суммирования 8 (1БС);
z(t) - выход блока деления 9 (БД);
u(t) - выход блока ограничения-инвертирования 10 (БОИ);
C1, C2 - параметрические выходы второго задатчика параметров 11 (2 ЗП);
g1(t), g2(t), d(t) - выходы четвертого 12 (4БУ), пятого 14 (5БУ) и шестого 16 (6БУ) блоков умножения;
m(t) - выход первого блока вычитания 13 (1БВ);
δ(t) - выход измерителя углового положения элеронов 15 (ИУПЭ);
- выход второго блока суммирования 17 (2БС);
F1(t), F2(t) - первый и второй выходы блока фильтрации 19 (БФ), которые являются выходами первого 21 (1ИУ) и второго 22 (2ИУ) интеграторов-усилителей;
 - выход блока оценивания возмущения 19 (БОВ), который является выходом четвертого блока суммирования 29 (4БС);
- выход блока оценивания возмущения 19 (БОВ), который является выходом четвертого блока суммирования 29 (4БС);
σ(t) - выход третьего блока суммирования 20 (3БС);
y1(t), y2(t) - выходы первого 23 (1БУИ) и второго 24 (2БУИ) блоков умножения-инвертирования;
S1(t), S2(t) - выходы второго 25 (2БВ) и третьего 27 (3БВ) блоков вычитания;
w1(t), w2(t) - выходы седьмого 26 (7БУ) и восьмого 28 (8БУ) блоков умножения.
Работа устройства формирования сигнала компенсации внешнего возмущения в канале управления креном ЛА, реализующее предложенный способ, описывается следующими уравнениями.
Измерители 1 и 2 измеряют текущие сигналы угла крена γ(t) и угловой скорости ω(t) ЛА, описываемого системой дифференциальных уравнений
 ,
,

и в момент времени t=0 запоминают, а на интервале функционирования J сохраняют значения

Здесь  ,
,  - динамические параметры ЛА, зависящие от скоростного напора q;
- динамические параметры ЛА, зависящие от скоростного напора q;
δ(t) - угол отклонения элеронов;
w(t) - неконтролируемое (недоступное приборному измерению) внешнее возмущение.
Закон управления задают в виде

где  - сигнал компенсации неконтролируемого возмущения w(t),
- сигнал компенсации неконтролируемого возмущения w(t),

передаточные числа автомата стабилизации, которые формируют с учетом оценок  ,
,  , получаемых на выходе блока формирования динамических параметров 6.
, получаемых на выходе блока формирования динамических параметров 6.
Полагают, что с приемлемой для практики точностью выполняются равенства

Получают уравнение замкнутой системы путем подстановки (3) в (1) и равносильных преобразований

Рассматривают модель замкнутой системы, описываемую уравнением

Здесь L1, L2 - постоянные коэффициенты, такие, что

а λ1, λ2 являются действительными и отрицательными корнями характеристического уравнения

Задают корни λ1, λ2 так, чтобы получить желаемые вид и время установления переходного процесса по  в системе (7).
в системе (7).
Приравнивают коэффициенты при одинаковых производных в обеих частях уравнений (6) и (7). В результате получают явный вид функций (4) и с учетом (5)

а также условия полной компенсации влияния неконтролируемого внешнего возмущения на угол крена ЛА:

Примечание: здесь и далее аргумент (q) для краткости опущен.
Блоки 1-10 реализуют закон управления (3), (10) при условии, что u(t) - δ(t). При этом на выходе блока 8 формируется суммарный сигнал  , включающий дополнительный сигнал компенсации
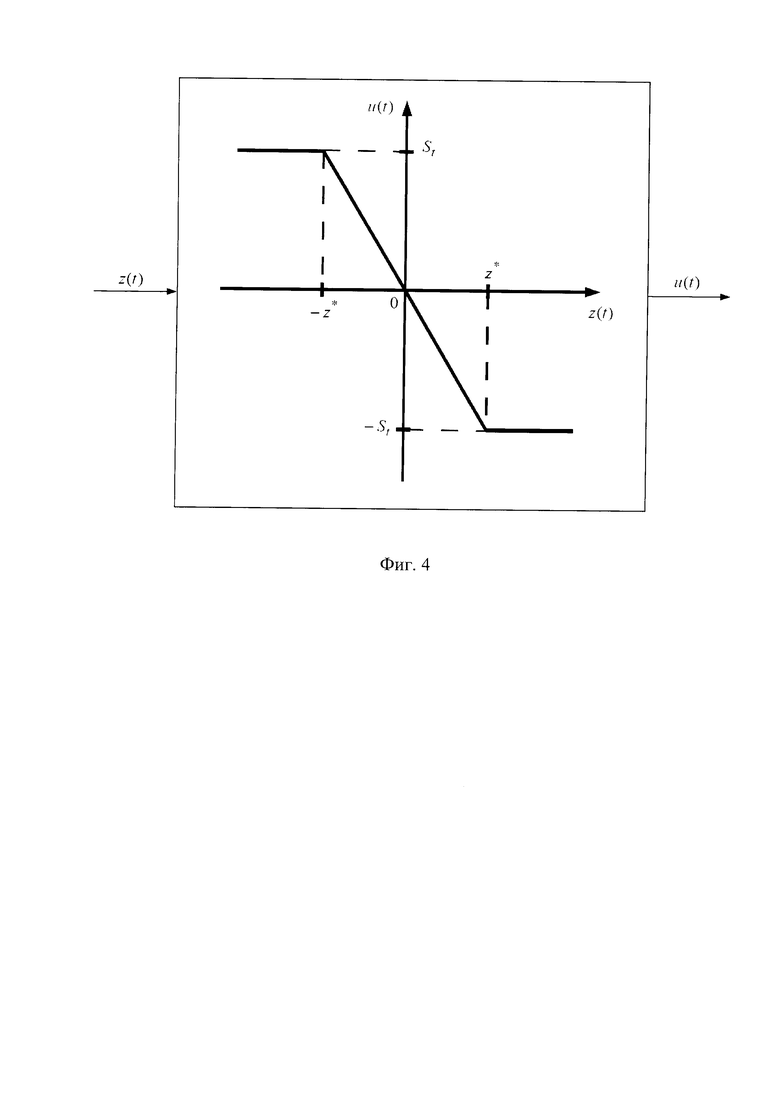
, включающий дополнительный сигнал компенсации  с выхода блока 19. В блоке 10 наряду с ограничением производится надлежащий выбор знака выходного сигнала u(t) (фиг. 4), обеспечивающий получение отрицательной обратной связи в системе управления каналом крена. Вход-выходная (статическая) характеристика блока 10 (фиг. 4) имеет вид
с выхода блока 19. В блоке 10 наряду с ограничением производится надлежащий выбор знака выходного сигнала u(t) (фиг. 4), обеспечивающий получение отрицательной обратной связи в системе управления каналом крена. Вход-выходная (статическая) характеристика блока 10 (фиг. 4) имеет вид
 ,
,
Степень ослабления влияния неконтролируемого внешнего возмущения на отклонение угла крена оценивается с помощью неравенства
где ε>0 - заданная константа.
Строят алгоритм, позволяющий сформировать сигнал оценки  неконтролируемого внешнего возмущения w(t) по вычисленным текущим оценкам
неконтролируемого внешнего возмущения w(t) по вычисленным текущим оценкам  ,
,  и по измеренным текущим значениями γ(t), ω(t), δ(t), а также по начальным данным γ(0), ω(0). С этой целью записывают систему в форме, удобной для оценивания неконтролируемого возмущения w(t):
и по измеренным текущим значениями γ(t), ω(t), δ(t), а также по начальным данным γ(0), ω(0). С этой целью записывают систему в форме, удобной для оценивания неконтролируемого возмущения w(t):


Точное решение уравнения (13) записывают в виде
в котором векторы в правой части удовлетворяют уравнениям


С учетом обозначений, принятых на фиг. 2, систему (16) представляют в развернутом виде




а затем - в скалярной форме

В свою очередь решение уравнения (16) представляют в форме

в которой матрица и вектор в правой части являются решениями следующих дифференциальных уравнений:


После подстановки (15), (17), (19) - (21) в уравнение (13) и несложных преобразований получают тождество. Это подтверждает справедливость представления (15).
По виду реакции системы (17) на единичную ступенчатую функцию w(t)-1(t) определяют типовые показатели качества оценивания неконтролируемого внешнего возмущения, а именно:
а) время нарастания
tH=[ln(-µ2)-ln(-µ1)]/(µ1-µ2),
которое находят из условия  ,
,
б) время установления
ty≅5.5tH.
При этом корни µ1, µ2 характеристического уравнения
µ2+C2µ+C1=0
матрицы
выбирают действительными, различными и отрицательными, а элементы C1, C2 вычисляют по формулам
С1=µ1µ2, С2=-(µ1+µ2).
Находят неизвестный вектор [S1(t), S2(t)]T из уравнения (15)
Вектор [γ(t),ω(t)]T получают с помощью измерителей 1, 4, а векторные сигналы [F1(t), F2(t)] - путем интегрирования уравнения (16) в блоке фильтрации 18.
Из первого уравнения в системе (17) находят
и записывают (17) в скалярной форме

Из (24) получают оценку неконтролируемого возмущения

и ошибку оценивания

Блок оценивания возмущения 19 производит вычисление по формулам (22), (25). Блок суммирования 17 формирует функцию (14), а блоки 12, 14, 16 вычисляют слагаемые в правой части (14).
Все функции формирования сигнала компенсации могут быть реализованы на элементах автоматики и вычислительной техники [4] и программно-алгоритмически.
Предложенное решение позволяет расширить функциональные возможности и повысить динамическую точность управления в канале крена ЛА при действии неконтролируемых возмущений.
Источники информации
1. И.А. Михалев и др. Системы автоматического управления самолетом. - М.: Машиностроение, 1987 г., с. 174.
2. Н.Т. Кузовков. Модальное управление и наблюдающие устройства. - М.: Машиностроение, 1976 г., с. 93-96.
3. Патент №2491600, G05D 1/00, 05.06.2012 г.
4. А.У. Ялышев, О.И. Разоренов. Многофункциональные аналоговые регуляционные устройства автоматики. - М.: Машиностроение, 1981 г., с. 121.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ФОРМИРОВАНИЯ ЦИФРОАНАЛОГОВОГО АДАПТИВНОГО СИГНАЛА СТАБИЛИЗАЦИИ УГЛОВОГО ПОЛОЖЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА ПО КУРСУ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2012 |
|
RU2491600C1 |
| АДАПТИВНЫЙ АВТОПИЛОТ УГЛА КРЕНА | 2004 |
|
RU2272747C2 |
| ИНЕРЦИАЛЬНО-РАДИОНАВИГАЦИОННАЯ СИСТЕМА | 2013 |
|
RU2539846C1 |
| УСТРОЙСТВО КООРДИНИРОВАННОГО РЕГУЛИРОВАНИЯ УГЛОВОГО БОКОВОГО ДВИЖЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА | 1990 |
|
RU2047888C1 |
| СПОСОБ ФОРМИРОВАНИЯ ЦИФРОАНАЛОГОВОГО СИГНАЛА СТАБИЛИЗАЦИИ УГЛОВОГО ПОЛОЖЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА ПО КУРСУ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2012 |
|
RU2491602C1 |
| РОБАСТНЫЙ ДИСКРЕТНЫЙ СТОХАСТИЧЕСКИЙ ФИЛЬТР | 2024 |
|
RU2830681C1 |
| Система управления боковым движением беспилотного малоразмерного летательного аппарата | 1990 |
|
SU1825746A1 |
| СИСТЕМА РЕГУЛИРОВАНИЯ ОБЪЕКТА С РЕЦИКЛОМ | 2014 |
|
RU2542910C1 |
| СИСТЕМА УПРАВЛЕНИЯ БОКОВЫМ ДВИЖЕНИЕМ БЕСПИЛОТНОГО МАЛОРАЗМЕРНОГО ЛЕТАТЕЛЬНОГО АППАРАТА | 1993 |
|
RU2042170C1 |
| Адаптивная система управления нестационарным линейным объектом | 1984 |
|
SU1277067A1 |
Группа изобретений относится к способу и устройству формирования сигнала угловой стабилизации по крену летательного аппарата. Для формирования сигнала угловой стабилизации по крену измеряют текущий сигнал углового положения летательного аппарата, сигнал угловой скорости и углового положения элеронов, формируют сигналы оценок динамических параметров, формируют выходной сигнал определенным образом с учетом дополнительно сформированного определенным образом сигнала оценки внешнего возмущения. Устройство формирования сигнала угловой стабилизации по крену содержит измерители углового положения по крену, угловой скорости по крену и углового положения элеронов, два задатчика параметров, блок формирования динамических параметров, шесть блоков умножения, два блока суммирования, блок деления, блок ограничения-инвертирования, блок фильтрации, блок оценивания возмущения. Блок оценивания возмущения содержит два блока вычитания, два блока умножения, блок суммирования. Блок фильтрации содержит блок сложения, два интегратора-усилителя, два блока умножения-инвертирования. Обеспечивается точность управления в канале крена с учетом неконтролируемых внешних возмущений. 2 н. и 2 з.п. ф-лы, 4 ил.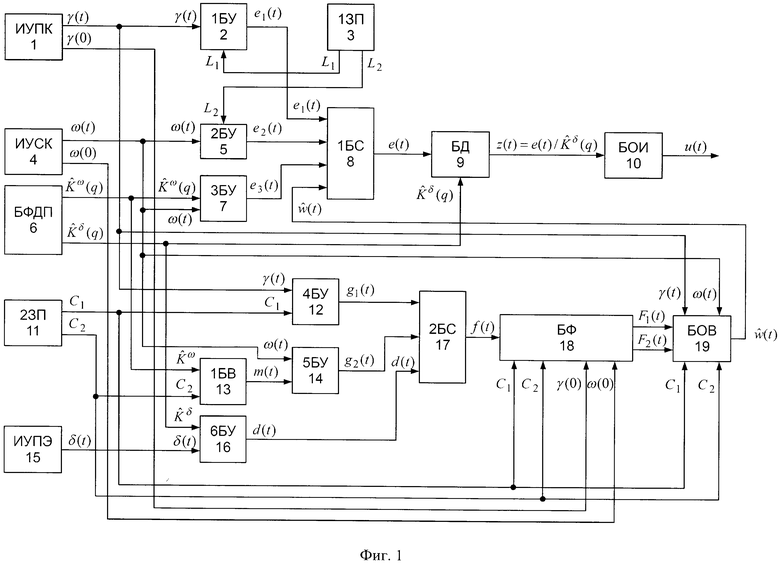
1. Способ формирования сигнала угловой стабилизации по крену летательного аппарата с оценкой и компенсацией внешнего возмущения, заключающийся в том, что измеряют текущий сигнал углового положения летательного аппарата, измеряют сигнал угловой скорости летательного аппарата, измеряют сигнал углового положения элеронов, формируют сигналы оценок  ,
,  динамических параметров, задают постоянные сигналы L1, L2, формируют суммарный сигнал e(t) из трех сигналов, при этом первый сигнал e1(t) в составе суммы получают усилением с коэффициентом L1 измеренного сигнала угла крена, второй сигнал e2(t) - усилением с коэффициентом L2 сигнала угловой скорости летательного аппарата, третий сигнал e3(t) - усилением с коэффициентом
динамических параметров, задают постоянные сигналы L1, L2, формируют суммарный сигнал e(t) из трех сигналов, при этом первый сигнал e1(t) в составе суммы получают усилением с коэффициентом L1 измеренного сигнала угла крена, второй сигнал e2(t) - усилением с коэффициентом L2 сигнала угловой скорости летательного аппарата, третий сигнал e3(t) - усилением с коэффициентом  сигнала угловой скорости летательного аппарата, формируют сигнал z(t) путем деления суммарного сигнала e(t) на сигнал оценки динамического параметра
сигнала угловой скорости летательного аппарата, формируют сигнал z(t) путем деления суммарного сигнала e(t) на сигнал оценки динамического параметра  и формируют выходной сигнал u(t) посредством ограничения и инвертирования сигнала z(t), отличающийся тем, что образуют сигнал оценки внешнего возмущения
и формируют выходной сигнал u(t) посредством ограничения и инвертирования сигнала z(t), отличающийся тем, что образуют сигнал оценки внешнего возмущения  посредством формирования обобщенного сигнала
посредством формирования обобщенного сигнала  , состоящего из суммы трех дополнительных сигналов g1(t), g2(t) и d(t), при этом первый сигнал g1(t) получают усилением измеренного сигнала угла крена с коэффициентом C1, второй сигнал g2(t) - усилением с коэффициентом
, состоящего из суммы трех дополнительных сигналов g1(t), g2(t) и d(t), при этом первый сигнал g1(t) получают усилением измеренного сигнала угла крена с коэффициентом C1, второй сигнал g2(t) - усилением с коэффициентом  сигнала угловой скорости летательного аппарата, третий сигнал d(t) - усилением с коэффициентом
сигнала угловой скорости летательного аппарата, третий сигнал d(t) - усилением с коэффициентом  сигнала угла элеронов, фильтруют обобщенный сигнал
сигнала угла элеронов, фильтруют обобщенный сигнал  с использованием динамического звена второго порядка с постоянными параметрами C1, C2 и формируют первый F1(t) и второй F2(t) выходные сигналы этого звена так, чтобы сигнал F2(t) являлся производной сигнала F1(t), а начальные значения F1(0), F2(0) совпадали соответственно с начальными измеренными значениями угла крена γ(0) и угловой скорости ω(0) формируют сигнал S1(t) путем вычитания сигнала F1(t) из измеренного сигнала угла крена γ(t), формируют сигнал S2(t) путем вычитания сигнала F2(t) из измеренного сигнала угловой скорости ω(t) по крену, получают сигнал w1(t) путем усиления с коэффициентом C1 сигнала S1(t), получают сигнал w2(t) путем усиления с коэффициентом C2 сигнала S2(t), формируют сигнал оценки
с использованием динамического звена второго порядка с постоянными параметрами C1, C2 и формируют первый F1(t) и второй F2(t) выходные сигналы этого звена так, чтобы сигнал F2(t) являлся производной сигнала F1(t), а начальные значения F1(0), F2(0) совпадали соответственно с начальными измеренными значениями угла крена γ(0) и угловой скорости ω(0) формируют сигнал S1(t) путем вычитания сигнала F1(t) из измеренного сигнала угла крена γ(t), формируют сигнал S2(t) путем вычитания сигнала F2(t) из измеренного сигнала угловой скорости ω(t) по крену, получают сигнал w1(t) путем усиления с коэффициентом C1 сигнала S1(t), получают сигнал w2(t) путем усиления с коэффициентом C2 сигнала S2(t), формируют сигнал оценки  внешнего возмущения путем суммирования сигналов w1(t) и w2(t), прибавляют сформированный сигнал
внешнего возмущения путем суммирования сигналов w1(t) и w2(t), прибавляют сформированный сигнал  к сумме e(t) сигналов e1(t), e2(t), e3(t).
к сумме e(t) сигналов e1(t), e2(t), e3(t).
2. Устройство формирования сигнала угловой стабилизации по крену летательного аппарата с оценкой и компенсацией внешнего возмущения, содержащее измеритель углового положения летательного аппарата по крену, измеритель угловой скорости по крену, измеритель углового положения элеронов, первый задатчик параметров, блок формирования динамических параметров, первый, второй и третий блоки умножения, первый блок суммирования, блок деления и блок ограничения-инвертирования, при этом первый выход измерителя углового положения по крену соединен с первым входом первого блока умножения, второй вход которого соединен с первым выходом первого задатчика параметров, первый выход измерителя угловой скорости по крену соединен с первым входом второго блока умножения, второй вход которого соединен со вторым выходом первого задатчика параметров, первый выход блока формирования динамических параметров соединен с первым входом третьего блока умножения, второй вход которого соединен с первым выходом измерителя угловой скорости по крену, выходы первого, второго и третьего блоков умножения соединены соответственно с первым, вторым и третьим входами первого блока суммирования, выход которого соединен с первым входом блока деления, второй вход которого соединен со вторым выходом блока формирования динамических параметров, выход блока деления соединен со входом блока ограничения-инвертирования, выход которого является выходом устройства, отличающееся тем, что оно содержит второй задатчик параметров, первый блок вычитания, четвертый, пятый и шестой блоки умножения, второй блок суммирования, блок фильтрации, блок оценивания возмущения, при этом первый выход измерителя углового положения по крену соединен с первым входом четвертого блока умножения, второй вход которого соединен с первым выходом второго задатчика параметров, второй выход второго задатчика параметров соединен со вторым входом первого блока вычитания, первый вход которого соединен с первым выходом блока формирования динамических параметров, выход первого блока вычитания соединен со вторым входом пятого блока умножения, первый вход которого соединен с первым выходом измерителя угловой скорости по крену, выход измерителя углового положения элеронов соединен со вторым входом шестого блока умножения, первый вход которого соединен со вторым выходом блока формирования динамических параметров, выходы четвертого, пятого и шестого блоков умножения соединены соответственно с первым, вторым и третьим входами второго блока суммирования, выход которого соединен с первым сигнальным входом блока фильтрации, второй и третий параметрические входы которого соединены соответственно с первым и вторым выходами второго задатчика параметров, а четвертый и пятый параметрические входы - со вторыми параметрическими выходами измерителей углового положения и угловой скорости крена соответственно, первый и второй выходы блока фильтрации соединены соответственно с первым и вторым сигнальными входами блока оценивания возмущения, третий и четвертый параметрические входы которого соединены соответственно с первым и вторым выходами второго задатчика параметров, а пятый и шестой сигнальные входы - с первыми сигнальными выходами измерителей углового положения и угловой скорости крена соответственно, выход блока оценивания возмущения присоединен к четвертому входу первого блока суммирования.
3. Устройство по п. 2, отличающееся тем, что блок фильтрации содержит последовательно соединенные третий блок суммирования, второй и первый интеграторы-усилители и первый блок умножения-инвертирования, а также второй блок умножения-инвертирования, первый сигнальный вход которого соединен с выходом второго интегратора-усилителя, а выход - с третьим входом третьего блока суммирования, выход первого блока умножения-инвертирования соединен со вторым входом третьего блока суммирования, вторые параметрические входы первого и второго интеграторов-усилителей являются соответственно четвертым и пятым параметрическими входами блока фильтрации, вторые параметрические входы первого и второго умножителей-инверторов являются соответственно вторым и третьим параметрическими входами блока фильтрации, выходы первого и второго интеграторов-усилителей являются соответственно первым и вторым выходами блока фильтрации.
4. Устройство по п. 2, отличающееся тем, что блок оценивания возмущения содержит второй и третий блоки вычитания, седьмой и восьмой блоки умножения и четвертый блок суммирования, при этом первый вход второго блока вычитания и первый вход третьего блока вычитания являются соответственно пятым и шестым сигнальными входами блока оценивания возмущения, а второй вход второго блока вычитания и второй вход третьего блока вычитания являются соответственно первым и вторым выходами блока фильтрации, выходы второго и третьего блоков вычитания соединены соответственно с первыми сигнальными входами седьмого и восьмого блоков умножения, вторые параметрические входы которых являются третьим и четвертым параметрическими входами блока оценивания возмущения, выходы седьмого и восьмого блоков умножения соединены соответственно с первым и вторым входами четвертого блока суммирования, выход которого является выходом блока оценивания возмущения.
| СПОСОБ ФОРМИРОВАНИЯ ЦИФРОАНАЛОГОВОГО АДАПТИВНОГО СИГНАЛА СТАБИЛИЗАЦИИ УГЛОВОГО ПОЛОЖЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА ПО КУРСУ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2012 |
|
RU2491600C1 |
| СПОСОБ ФОРМИРОВАНИЯ СИГНАЛА УПРАВЛЕНИЯ СИСТЕМОЙ СТАБИЛИЗАЦИИ БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА | 2011 |
|
RU2487052C1 |
| Приспособление для устранения мигания при проектировании фильмы на экране | 1929 |
|
SU19036A1 |
| Машина для образования профиля грунтовых дорог и т.п. | 1933 |
|
SU33553A1 |
| US 7908043 B2, 15.03.2011. | |||

