ОБЛАСТЬ ТЕХНИКИ
[0001] Изобретение, в целом, относится к изменяемому и адаптивному безотводному воздухозаборнику с выпуклым элементом для самолета.
УРОВЕНЬ ТЕХНИКИ
[0002] Обычная конструкция воздухозаборника двигателя для военного самолета, как правило, содержит отводное устройство (отсекатель) пограничного слоя, предназначенное для предотвращения засасывания пограничного слоя с передней части самолета в воздухозаборник. При засасывании этот низкоэнергетический пограничный слой воздуха создает возмущения потока во впускном канале, которые вредны для работы двигателя. Отводное устройство представляет собой зазор между воздухозаборником двигателя и фюзеляжем самолета, предназначенный для снятия пограничного слоя воздуха с низким давлением с передней части фюзеляжа, чтобы предотвратить попадание этого воздуха во впускной канал и создание возмущений в нем, отрицательно влияющих на работу двигателя. Один из недостатков существования отводного устройства (отсекателя) состоит в том, что оно увеличивает радиолокационную эффективную поверхность рассеяния самолета, что приводит к возможности более раннего обнаружения самолета радарами противника.
[0003] Вышеупомянутые недостатки были устранены некоторыми усовершенствованными конструкциями самолетов-истребителей, оборудованных сверхзвуковыми безотводными воздухозаборниками (diverterless supersonic inlet, DSI), также называемыми безотводными воздухозаборниками с выпуклым элементом, представляющими конструкцию воздухозаборника без обычного отводного устройства (отсекателя) пограничного слоя. Выпуклый элемент в конструкции безотводного воздухозаборника с выпуклым элементом отводит большую часть пограничного слоя с передней части от впуска в воздухозаборник, благодаря статическим градиентам давления в направлении по размаху крыла на выпуклой поверхности, таким образом, предотвращая засасывание пограничного слоя. Также выпуклый элемент изоэнтропически сжимает воздух во время сверхзвукового полета для максимизации характеристик воздухозаборника, таким образом, улучшая работу двигателя.
[0004] Геометрия безотводного воздухозаборника с выпуклым элементом крайне индивидуализирована к сверхзвуковому полету и специфическому числу Маха. Эта особая геометрия обычно является неблагоприятной для непредусмотренных условий полета, что, в свою очередь, требует существенных усилий в конструировании воздухозаборника. Уступки и компромиссы в конструировании всего воздухозаборника и, возможно, самолета, должны быть сделаны для адаптации заданной геометрии конструкции безотводного воздухозаборника с выпуклым элементом для удовлетворения всему списку профилей полета.
[0005] Следовательно, существует потребность в создании устройства или способа для более эффективной работы воздухозаборника двигателя на большинстве этапов полета и условий полета самолета.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Существующая проблема решается с помощью изобретения, заявленного в независимых пунктах формулы изобретения. Другие предпочтительные варианты изобретения включены в зависимые пункты. Необходимо отметить, что аспекты изобретения, описанного в настоящей заявке, относятся как к воздухозаборнику двигателя самолета, так и к способу для изменения воздухозаборника двигателя самолета. Согласно настоящему изобретению, предложено устройство для воздухозаборника двигателя самолета. Устройство содержит гибкий впуск, по меньшей мере один механизм и блок обработки данных. Гибкий впуск сформирован из деформируемого материала. Гибкий впуск содержит внешнюю поверхность, внутреннюю поверхность и множество кромок. Множество кромок частично прикреплено к обшивке фюзеляжа самолета. Множество кромок прикреплено частично к впускному каналу воздухозаборника двигателя самолета. Воздухозаборник двигателя, кроме того, содержит по меньшей мере один механизм, выполненный с возможностью изменения по меньшей мере формы гибкого впуска. Воздухозаборник двигателя, кроме того, содержит блок обработки данных, выполненный с возможностью управления механизмом.
[0006] Термин "воздухозаборник двигателя самолета" можно понимать как полную впускную часть самолета, содержащую по меньшей мере впускной канал, расположенный смежно с поверхностью фюзеляжа, обеспечивающий невозмущенный поток воздуха к двигателю.
[0007] Термин "гибкий впуск" можно понимать как часть воздухозаборник двигателя самолета, выполненную из гибкого материала, обеспечивающего возможность изменения указанной частью своей формы, так как это требуется и когда это требуется.
[0008] Термин "форма гибкого впуска" можно понимать как форму гибкого впуска при наблюдении с одной или многих осей, почти параллельных поверхности гибкого впуска.
[0009] Другими словами, изменяя форму гибкого впуска двигателя, можно изменять воздухозаборник двигателя для более эффективной работы воздухозаборника двигателя на большинстве этапов полета и условий полета самолета.
[0010] Согласно следующему варианту, деформируемый материал может иметь гибкость и прочность. Гибкость и прочность могут быть определены на основе формы гибкого впуска. Понятно, что гибкий впуск может принимать различные формы при различных полетных условиях, и, следовательно, деформируемый материал должен иметь гибкость для гибкого впуска для обеспечения возможности изменяться от одной формы к другой. Кроме того, чтобы сопротивляться различным силам, действующим на гибкий впуск, для достижения различных форм, прочность деформируемого материала определяется соответственно. Кроме того, может учитываться цикл усталостного нагружения гибкого впуска для определения гибкости и прочности деформируемого материала.
[0011] Согласно дальнейшему варианту, деформируемый материал гибкого впуска может содержать по меньшей мере две секции. Гибкости и прочности различных секций могут быть одинаковые или различные. На практике сила, действующая на гибкий впуск, не должна даже быть всюду.
Приложенная сила может всегда действовать на одну секции гибкого впуска, и может быть необходимо, чтобы эта секция имела другую гибкость и прочность, в сравнении с остальной секцией гибкого впуска.
[0012] Согласно следующему варианту, множество кромок гибкого впуска может ограничивать форму в плане гибкого впуска. Гибкий впуск, предпочтительно, крепится к обшивке фюзеляжа и к впускному воздушному каналу двигателя, так что внешняя поверхность гибкого впуска является непрерывной с по меньшей мере поверхностью обшивки фюзеляжа и по меньшей мере поверхностью впускного воздушного канала двигателя.
[0013] Термин "форма в плане гибкого впуска" можно понимать, как форму гибкого впуска при наблюдении с оси, почти перпендикулярной поверхности гибкого впуска.
[0014] Возможно, что, из-за используемого материала и требований к прочности гибкого впуска, обшивка фюзеляжа и впускной воздушный канал двигателя могут не быть одинаковыми. Следовательно, толщина гибкого впуска может отличаться от толщины обшивки фюзеляжа и толщины воздушного канала двигателя. Толщина гибкого впуска может быть определена как расстояние между внешней поверхностью и внутренней поверхностью гибкого впуска. Следует понимать, что в таких ситуациях, когда гибкий впуск может быть прикреплен к обшивке фюзеляжа и впускному воздушному каналу двигателя, для обеспечения плавного воздушного потока, предпочтительно, поддерживается непрерывность внешней поверхности. В конкретных случаях пограничный слой, предпочтительно, не искажается. По меньшей мере, возникшее возмущение, предпочтительно, сохраняется минимальным, предпочтительно около области, где гибкий впуск крепится к обшивке фюзеляжа и впускному воздушному каналу двигателя.
[0015] Согласно следующему варианту, механизм содержит, по меньшей мере, одну головку. Головка может быть в контакте с внутренней поверхностью гибкого впуска. Головка обычно искривлена, с предпочтительно гладкой поверхностью, для обеспечения, предпочтительно, гладкого контакта с гибким впуском и также для обеспечения минимизации повреждений вследствие трения между головкой и внутренней поверхностью гибкого впуска. Кроме того, форма головки может быть определена на основе различных форм гибкого впуска, которых необходимо получить во время различных условий полета самолета.
[0016] Механизм может, кроме того, содержать, по меньшей мере, один рычаг, содержащий по меньшей мере первый конец и второй конец. Первый конец рычага может быть присоединен шарнирно к головной части механизма.
[0017] Механизм, кроме того, может содержать по меньшей мере одну позиционирующую систему, включающую по меньшей мере одно управляющее сочленение и базу. База позиционирующей системы может быть прикреплена по меньшей мере к конструкции самолета. Управляющее сочленение позиционирующей системы может быть присоединено ко второму концу рычага. Управляющее сочленение может, кроме того, быть выполнено с возможностью приема сигнала блока обработки данных, при этом сигнал может быть сигналом требуемого положения рычага.
[0018] Согласно дальнейшему варианту, управляющее сочленение позиционирующей системы выполнено с возможностью управления рычагом механизма посредством перемещения рычага вдоль по меньшей мере одной из продольной, поперечной и вертикальной оси рычага.
[0019] Рычаг может перемещаться вдоль его вертикальной оси посредством управляющего сочленения с помощью выполнения рычага, например, телескопическим, по сути.
Приводной механизм
телескопического устройства рычага может быть обычного поршневого типа, приводимого в действие гидравлически или пневматически. Приводной механизм может также быть винтового типа, где вращение либо внешнего, либо внутреннего цилиндра, соответственно, изменяет длину. Следует отметить, что приводной механизм для перемещения рычага вдоль его вертикальной оси может быть одним из комбинации вышеописанных механизмов, или может любым другим известным способом изменять длину конструкции.
[0020] В другом варианте управляющее сочленение системы позиционирования выполнено с возможностью управления рычагом механизма путем вращения рычага вокруг, по меньшей мере, одной из продольной, поперечной и вертикальной осей рычага. Определение оси можно понять из более раннего описания.
[0021] Кроме того, следует понимать, что на практике управляющее сочленение не обязательно должно быть управляемым с возможностью перемещения и вращения рычага вдоль или вокруг всех из поперечной, продольной и вертикальной осей. Может, например, быть достаточным для управляющего сочленения управлять рычагом только по одной или нескольким из шести степеней свободы рычага для достижения требуемой формы гибкого впуска.
[0022] Механизм в другом варианте может быть простым, основанным на давлении механизмом. В этом варианте механизм содержит, по меньшей мере, мешок и управляющее сочленение. Управляющее сочленение может быть выполнено с возможностью приема сигнала от блока обработки данных, причем сигнал может, например, быть сигналом требуемого давления пузыря. Управляющее сочленение может также быть выполнено с возможностью управления давлением мешка с обеспечением давления одинакового с требуемым давлением мешка.
[0023] Согласно следующему варианту, блок обработки данных может быть выполнен с возможностью приема множества параметров полета от самолета. Параметры полета могут включать, без ограничения указанным, такие параметры самолета, как скорость, высота, наружная температура, наружное давление, наружная плотность воздуха. Необходимо понимать, что в альтернативном случае блок обработки данных принимает все необходимые параметры от самолета, для расчета, например, динамического давления и числа Рейнольдса, соответствующих условиям полета самолета.
[0024] Блок обработки данных может, кроме того, быть выполнен с возможностью приема информации от базы данных, которая может содержать по меньшей мере условия полета и положение рычага механизма или давление мешка. Информация об условиях полета в базе данных может быть по меньшей мере динамическим давлением и числом Рейнольдса. Информация в базе данных о положении рычага механизма может включать одно или много положений рычага вдоль и вокруг его продольной, поперечной и вертикальной осей.
[0025] Блок обработки информации может, кроме того, быть выполнен с возможностью сравнения информации из базы данных с полученными параметрами полета и идентификации требуемого положения рычага механизма или требуемого давления мешка. Процесс идентификации может включать сравнение полученных параметров полета с условиями полета, и рассмотрение соответствующего положения рычага или давления мешка, как требуемого положения рычага или требуемого давления мешка, соответственно. Например, в случае, когда условия полета не присутствуют в списке условий полета базы данных, тогда ближайшие условия в списке условий полета могут быть рассмотрены для идентификации требуемого положения рычага или требуемого давления мешка. В альтернативном случае, верхнее и нижнее значения принятых параметров полета в списке условий полета могут быть рассмотрены и соответствующее положение рычага или давление мешка может быть интерполировано. В случае если верхнее, либо нижнее значение принятого параметра полета не присутствует в списке условий полета, то данные могут быть, например, экстраполированы.
[0026] Блок обработки данных может, кроме того, быть выполнен с возможностью управления управляющим сочленением механизма.
[0027] Согласно дальнейшему варианту, положение рычага или давление мешка в базе данных может быть определено на основе, например, различной формы гибкого впуска, которую необходимо получить для различных условий полета. Положение рычага или давление мешка может, например, быть определено на основании формы гибкого впуска во время фазы конструирования самолета.
[0028] Форма гибкого впуска может быть различной для различных условий полета и, следовательно, рычаг или мешок должны находиться в различных положениях для достижения форм для различных условий полета. Во время конструирования самолета может быть определено какой вид механизма необходимо использовать, и где в самолете эти механизмы могут быть расположены.
[0029] Согласно другому варианту, форма гибкого впуска может быть определена на основе результата гидрогазодинамического моделирования во время конструирования самолета.
[0030] Гидрогазодинамическое моделирование, использованное для определения формы гибкого впуска во время конструирования самолета, может быть одним или комбинацией численных, или расчетных, или экспериментальных гидрогазодинамических моделирований в другом варианте.
[0031] Численное гидрогазодинамическое моделирование может быть одним из классических гидрогазодинамических вычислений. Компьютерное гидрогазодинамическое моделирование может быть гидрогазодинамическим моделированием, выполненным с помощью доступного на рынке программного обеспечения для моделирования. Экспериментальное гидрогазодинамическое моделирование может быть анализом в аэродинамической трубе, обычно выполняемым для определения аэродинамических характеристик объекта.
[0032] В альтернативном случае экспериментальное гидрогазодинамическое моделирование может быть выполнено с помощью установки предложенного устройства на реальный самолет, и различные формы могут быть изучены для определения оптимальной формы гибкого впуска, который следует использовать в самолете при различных условиях полета.
[0033] В другом варианте гидрогазодинамические моделирования могут быть выполнены для всех проектных профилей полета и проектных режимов полета самолета. Для получения промежуточных условия полета, гидрогазодинамические моделирования могут быть выполнены для условий полета, иных, чем полетные условия в проектном профиле полета и проектных режимах полета.
[0034] Во время гидрогазодинамического моделирования могут быть смоделированы различные формы гибкого впуска для конкретных условий полета для идентификации формы гибкого впуска, которая дает максимальное преимущество. Такая идентифицированная форма гибкого впуска может быть использована для создания базы данных. На основе конструкции механизма, например, определяется соответствующее положение рычага, которое будет положением рычага в базе данных для условия полета.
[0035] В результате может быть создан адаптивный и изменяемый безотводный воздухозаборник с выпуклым элементом, который, в частности, обеспечивает возможность регулирования поверхности гибкого впуска согласно конкретным требованиям, таким образом, максимизируя эффективность впуска и, следовательно, тяговую эффективность двигателя. Устройство, кроме того, уменьшает время и стоимость проектирования самолета, благодаря простоте и гибкости устройства.
[0036] Согласно настоящему изобретению, также представлен способ для адаптивного и изменяемого безотводного воздухозаборника с выпуклым элементом.
[0037] Способ содержит шаг приема параметров полета самолета. Способ, кроме того, содержит сравнение принятых параметров полета с базой данных, по меньшей мере, для положения рычага механизма. База данных содержит множество условий полета и соответствующих по меньшей мере положений рычага механизма. Условия полета в базе данных включают по меньшей мере условия полета, определенные в проектном профиле полета и в проектных режимах полета самолета. Способ, кроме того, содержит шаг управления положением рычага механизма в положение, подобное положению рычага механизма в базе данных, соответствующему принятым параметрам полета самолета.
[0038] Однако, специалисту понятно, что эти шаги могут быть выполнены в любом другом подходящем порядке. В альтернативном случае один или более шагов могут быть выполнены одновременно.
[0039] Эти и другие аспекты настоящего изобретения будут более понятны и разъяснены со ссылкой на варианты, описанные ниже.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
[0040] На чертежах подобные ссылочные обозначения, в целом, относятся к одинаковым частям на различных фигурах. Чертежи необязательно выполнены в масштабе, вместо этого они направлены на иллюстрирование принципов изобретения. На чертежах крайняя слева цифра (цифры) ссылочного номера может идентифицировать фигуру, на которой ссылочный номер появляется впервые. Одинаковые номера могут быть использованы на чертежах для ссылки на подобные детали и компоненты. В следующем описании различные варианты изобретения описываются со ссылкой на следующие чертежи, где:
на фиг. 1 схематически показан самолет с воздухозаборником двигателя;
на фиг. 2 схематически показан вариант воздухозаборника двигателя;
на фиг. 3 схематически показан механизм первого варианта;
на фиг. 4 схематически показан механизм с двумя рычагами, каждый из которых управляется двумя различными управляющими сочленениями;
на фиг. 5 схематически показан механизм с двумя рычагами, каждый управляется единственным управляющим блоком;
на фиг. 6 схематически показана блок-схема работы блока обработки данных;
на фиг. 7 схематически показан механизм второго варианта.
ОПИСАНИЕ
[0041] Следующее подробное описание ссылается на сопровождающие чертежи, которые показывают, в качестве иллюстрации, конкретные детали и варианты, в которых изобретение может быть реализовано.
[0042] Слово "пример" используется в настоящем документе в смысле "служащий в качестве примера, отдельного случая, или иллюстрации". Любой вариант или конструкция, описанные как "пример", необязательно рассматривать как предпочтительный или преимущественный среди других вариантов или конструкций.
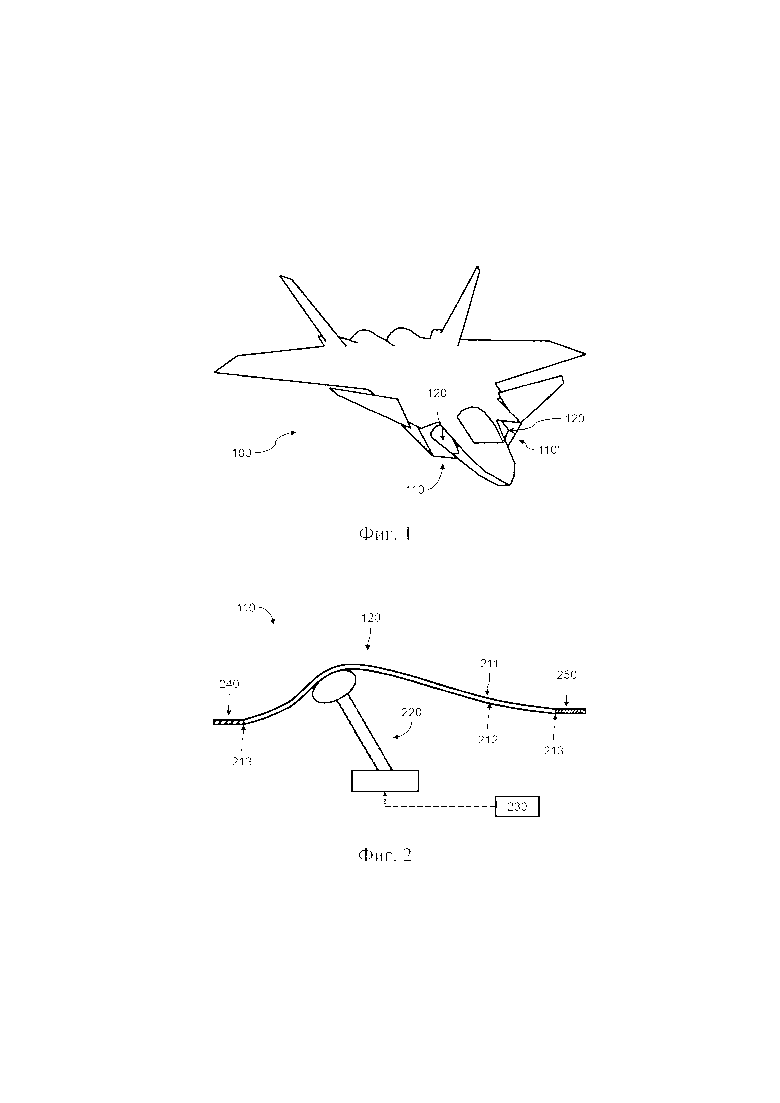
[0043] На фиг. 1 схематически показан пример самолета 100 с воздухозаборником 110 и 110' двигателя. На фиг. 1 также схематически показан гибкий впуск 120 и 120', являющийся частью воздухозаборника 110 и 110' двигателя, соответственно. Воздухозаборник 110 двигателя расположен вдоль поверхности фюзеляжа для подачи воздуха для двигателя самолета 100. Воздухозаборник 110 двигателя является безотводным воздухозаборником. Гибкий впуск 120, схематически показанный на фиг. 1, является частью воздухозаборника 110 двигателя, сформированной из гибкого материала, выполненного с возможностью изменения своей формы в одном или множестве вариантов, описанных в настоящей заявке. Воздухозаборник 110' двигателя и гибкий впуск 120' подобны воздухозаборнику 110 двигателя и гибкому впуску 120, описанным выше, но расположены на другой стороне самолета 100.
[0044] На фиг. 2 схематически показан вариант воздухозаборника 110 двигателя. Воздухозаборник 110 двигателя содержит гибкий впуск 120, образованный из деформируемого материала. Гибкий впуск 120, кроме того, содержит внешнюю поверхность 211, внутреннюю поверхность 212, и множество кромок 213. Внешнюю поверхность 211 в настоящем описании можно понимать, как поверхность гибкого впуска 120, обращенную к свободному потоку воздуха во время полета. Внутреннюю поверхность 212 можно понимать как другую поверхность гибкого впуска 120. Множество кромок 213 ограничивает в плане форму гибкого воздухозаборника и прикреплено частично к обшивке 240 фюзеляжа, и частично - к воздухозаборному каналу 250 двигателя. Гибкий впуск 120 прикреплен к обшивке 240 фюзеляжа и воздухозаборному каналу 250 двигателя с обеспечением непрерывной внешней поверхности 211 по меньшей мере с поверхностью обшивки 240 фюзеляжа самолета 100 и по меньшей мере поверхностью воздухозаборного канала 250 двигателя. Воздухозаборник 110 двигателя на фиг. 1 содержит механизм 220, предназначенный для изменения формы гибкого впуска 120. Воздухозаборник 110 двигателя содержит блок 230 обработки данных для управления механизмом 220. Блок 230 соединен с механизмом 220 для управления, причем средство соединения может быть проводным или беспроводным (не показано) для передачи управляющего сигнала от блока 230 обработки данных к механизму 220.
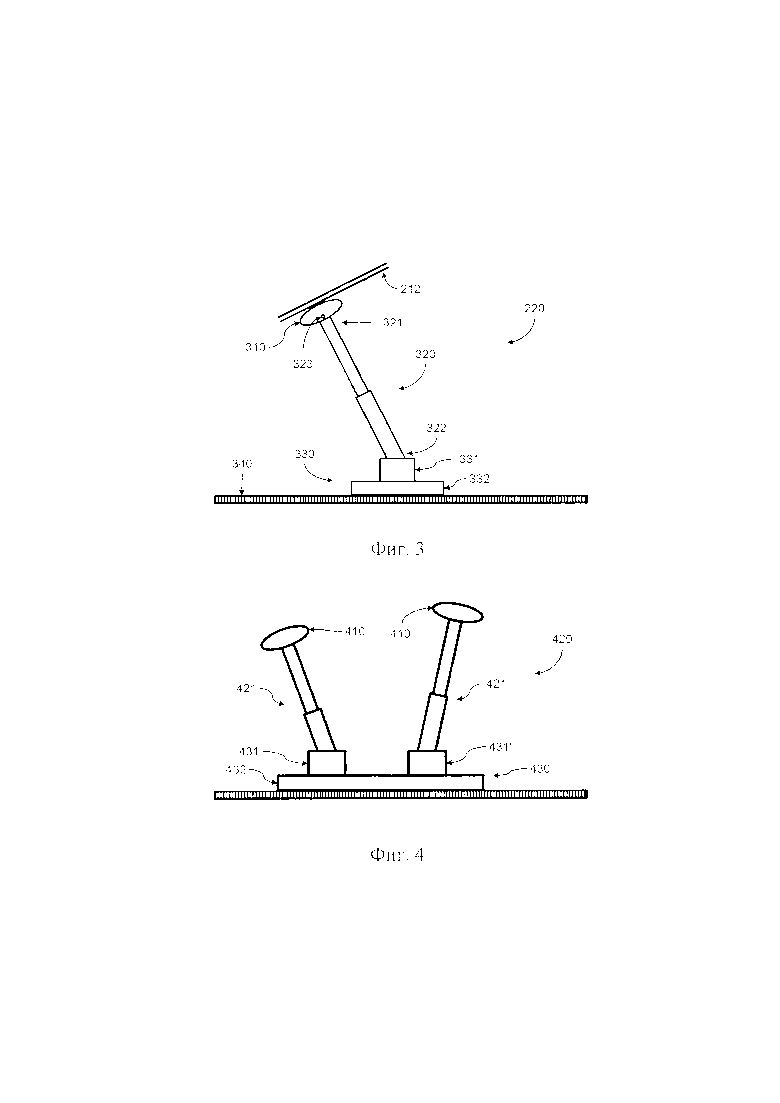
[0045] На фиг. 3 схематически показан пример механизма 220. Механизм 220 содержит головку 310, рычаг 320 и позиционирующую систему 330. Головка 310 находится в контакте с внутренней поверхностью 212 гибкого впуска 120. Для обеспечения плавного контакта с гибким впуском 120 и предотвращения повреждения внутренней поверхности 212 гибкого впуска 120 при изменении формы гибкого впуска 120 головка 310 обычно является криволинейной с гладкой поверхностью. Кроме того, форма головки 310 также может быть выбрана на основе требуемых форм гибкого впуска 120, которые необходимо достигать во время различных условий полета самолета 100. Рычаг 320 механизма 220 содержит первый конец 321 и второй конец 322. Первый конец 321 соединен с головкой 310 с помощью соединения 323. Соединение 323 первого конца 321 с головкой 310 находится на стороне головки 310, по существу противоположной стороне, головки 310, находящейся в контакте с внутренней поверхностью 212 гибкого впуска 120. Кроме того, соединение 323 может быть не жестким, а шарнирным для обеспечения возможности свободного перемещения головки 310 вокруг соединения 323, сохраняя при этом соединение с рычагом 320. Второй конец 322 рычага 320 соединен с позиционирующей системой 330, как описано в следующем варианте. Позиционирующая система 330 механизма 220 включает управляющее сочленение 331 и основание 332. Основание 332 позиционирующей системы 330 служит для крепления позиционирующей системы 330 и, следовательно, механизма 220, к одной или многим из конструкций 340 самолета. Управляющее сочленение 331 позиционирующей системы 330 соединено со вторым концом 322 рычага 320. Управляющее сочленение 331, кроме того, выполнено с возможностью приема команд от блока 230 обработки данных и перемещения рычага 320 соответственно. Управляющее сочленение 331 позиционирующей системы 330 выполнено с возможностью управления рычагом 320 механизма 220, например, путем перемещения рычага 320 вдоль по меньшей мере одной из продольной, поперечной и вертикальной осей рычага 320. Вертикальная ось рычага 320 может быть осью вдоль длины рычага 320. Продольная и поперечная оси рычага 320 в таком случае будут двумя другими перпендикулярными осями на плоскости, перпендикулярной вертикальной оси рычага 320. Рычаг 320 может перемещаться вдоль своей вертикальной оси, посредством управляющего сочленения 331, с помощью конструирования рычага 320 телескопическим. Управляющее сочленение 331 позиционирующей системы 330, кроме того, выполнено с возможностью управления рычагом 320 механизма 220, например, посредством вращения рычага 320 вокруг по меньшей мере одной из продольной, поперечной и вертикальной оси рычага 320. Определение оси можно понять из предыдущего описания. Кроме того, следует понимать, что на практике управляющее сочленение 331 может не нуждаться в управлении перемещением и вращением рычага 320 вдоль или вокруг всех поперечной, продольной и вертикальной осей. Для управляющего сочленения 331 может быть достаточно управления рычагом 320 только в одной или нескольких из шести степеней свободы рычага 320 для достижения требуемой формы гибкого впуска 120.
[0046] На фиг. 4 схематически показан следующий вариант примера механизма 420. В этом варианте механизм 420 подобен механизму 220, показанному на фиг. 2. В варианте, показанном на фиг. 4, позиционирующая система 430 механизма 420 включает два управляющих сочленения 431 и 431' на общем основании 432. Каждое управляющее сочленение 431 и 431' соединено с двумя отдельными рычагами 421 и 421'. Кроме того, каждый рычаг 421 и 421' соединен с двумя различными головками 410 и 410'. Назначение, конструкция и механизм, где применимы, основания 432, управляющих сочленений 431 и 431', рычагов 421 и 421', и головок 410 и 410' можно понять, как подобные основанию 332, управляющему сочленению 331, рычагу 320 и головке 310, как описано ранее в связи с фиг. 3. Кроме того, следует понимать, что, хотя иллюстрация показывает только два рычага 421 и 421' и связанные с ними компоненты, на практике может быть больше двух рычагов и связанных компонентов.
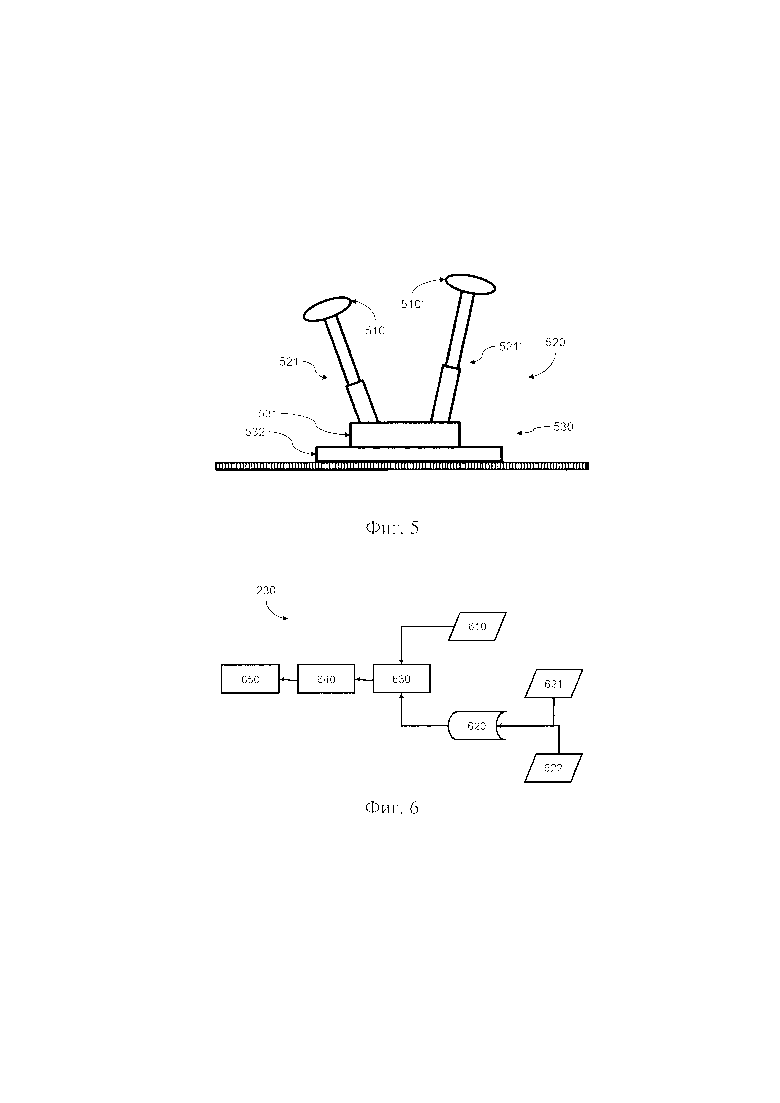
[0047] На фиг. 5 схематически показан еще один вариант примера механизма 520. В этом варианте механизм 520 подобен механизму 420, показанному на фиг. 4. В варианте, показанном на фиг. 5, позиционирующая система 530 включает только одно управляющее сочленение 531 на основании 532, управляющее двумя рычагами 521 и 521' механизма 520. Два рычага 521 и 521' соединены по отдельности с двумя головками 510 и 510' для изменения формы гибкого впуска 120. Кроме того, следует понимать, что, хотя иллюстрации показывают два рычага 521 и 521', управляемых управляющим сочленением 531, на практике может быть больше двух рычагов, управляемых управляющим сочленением 531.
[0048] На фиг. 6 схематически показана блок-схема работы блока 230 обработки данных. Блок 230 выполнен с возможностью приема в качестве входных параметров множества параметров 610 полета самолета. Полетные параметры 610 включают, без ограничения указанным, такие параметры самолета 100, как скорость, высота, окружающая температура, окружающее давление, окружающая плотность воздуха. В альтернативном случае, можно понять, что блок 230 обработки данных принимает все необходимые параметры от самолета 100 для расчета динамического давления и число Рейнольдса, соответствующих условиям полета самолета 100. Блок 230, кроме того, выполнен с возможностью получения в качестве входных параметров информации от базы данных 620. Информация, доступная в базе данных 620, включает по меньшей мере полетные условия 621 и соответствующее положение 622 одного или более рычагов 320 механизма 220. Далее, данные из базы данных 620 для принятых полетных параметров 621 сравниваются, и на шаге 630 идентифицируется требуемое положение 640 рычага 320 механизма 220. На шаге 650 управляющее сочленение 331 позиционирующей системы 330 управляется для перемещения рычага 320 механизма 220 для достижения требуемого положения 640. Управление 650 может состоять в отправлении соответствующих сигналов управляющему сочленению 331, обеспечивающего соответственно перемещение управляющим сочленением 331 рычага 320. В зависимости от системы, используемой в управляющем сочленении 330, сигнал может быть одним из электрических сигналов или гидравлическим давлением или их комбинацией.
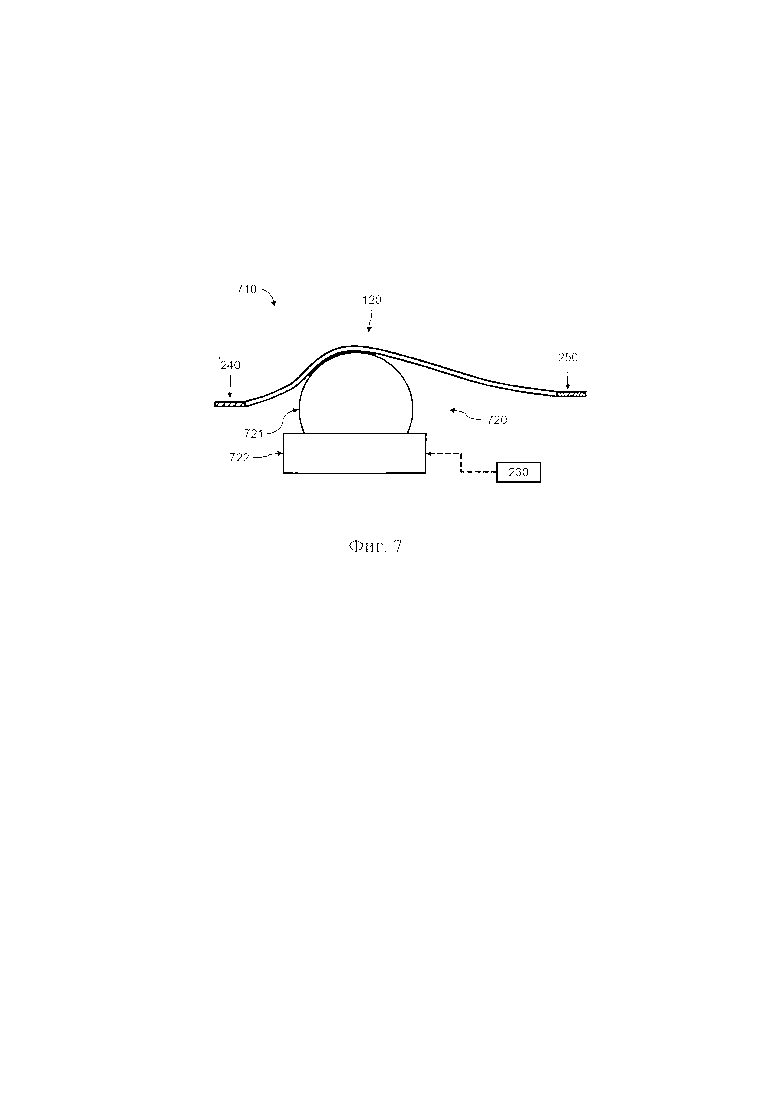
[0049] На фиг. 7 схематически показан вариант примера воздухозаборника 710 двигателя с механизмом 720, основанном на давлении. В этой иллюстрации механизм 720 включает мешок 721 и управляющее сочленение 722 для управления формой гибкого впуска 120. При приеме сигнала от блока 230 обработки данных, управляющее сочленение 722 управляет давлением внутри мешка 721 с обеспечением изменения формы гибкого впуска 120. Управляющее сочленение 722, кроме того, выполнено с возможностью перемещения мешка 721 в плоскости, по существу параллельной форме в плане гибкого впуска 120. В альтернативном случае устройство может быть выполнено таким образом, что часть мешка 721 может представлять гибкий впуск 120.
| название | год | авторы | номер документа |
|---|---|---|---|
| ОГРАНИЧИТЕЛЬ ПОТОКА ВОЗДУХОЗАБОРНИКА | 2016 |
|
RU2727829C2 |
| ВОЗДУХОЗАБОРНИК ДВУХКОНТУРНОГО ТУРБОРЕАКТИВНОГО ДВИГАТЕЛЯ | 2007 |
|
RU2413657C2 |
| ВОЗДУХОЗАБОРНИК СВЕРХЗВУКОВОГО ДВИГАТЕЛЯ С ВНУТРЕННИМ СЖАТИЕМ | 1997 |
|
RU2182670C2 |
| ВОЗДУХОЗАБОРНИК ДВИГАТЕЛЯ САМОЛЕТА | 2002 |
|
RU2209154C1 |
| Воздухозаборник магистрального самолёта | 2023 |
|
RU2820929C1 |
| Сверхзвуковой нерегулируемый воздухозаборник | 2021 |
|
RU2779515C1 |
| ВОЗДУХОЗАБОРНИК | 1983 |
|
RU2078717C1 |
| Воздухозаборник двигателя летательного аппарата | 2024 |
|
RU2833840C1 |
| Воздухозаборник двигателя летательного аппарата | 2023 |
|
RU2832863C1 |
| ВОЗДУХОЗАБОРНИК АВИАЦИОННОГО ДВИГАТЕЛЯ С ТОЛКАЮЩИМИ ВОЗДУШНЫМИ ВИНТАМИ, НЕ ЗАКЛЮЧЕННЫМИ В ОБТЕКАТЕЛЬ | 2009 |
|
RU2507126C2 |
Воздухозаборник (110) двигателя самолета содержит гибкий впуск (120), сформированный из деформируемого материала, который содержит внешнюю поверхность (211), внутреннюю поверхность (212) и множество кромок (213), которые прикреплены к обшивке (240) фюзеляжа самолета и к воздухозаборному каналу (250) двигателя самолета. Имеется механизм (720), выполненный с возможностью изменения формы гибкого впуска (120) и блок (230) обработки данных, выполненный с возможностью управления механизмом (720), который содержит мешок и управляющее сочленение, которое выполнено с возможностью приема сигнала от блока (230) обработки данных, который представляет требуемое давление мешка. Управляющее сочленение выполнено с возможностью изменения давления мешка на требуемое давление мешка. Способ характеризуется использованием воздухозаборника. Группа изобретений направлена на повышение эффективности работы воздухозаборника двигателя при всех скоростях и уменьшение радарной видимости. 2 н. и 7 з.п. ф-лы, 7 ил.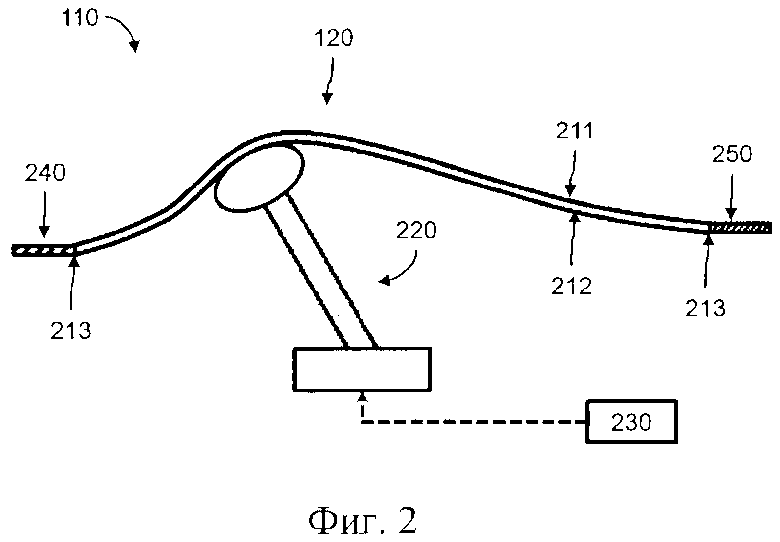
1. Воздухозаборник (110) двигателя самолета (100), содержащий:
гибкий впуск (120), сформированный из деформируемого материала, при этом гибкий впуск (120) содержит внешнюю поверхность (211), внутреннюю поверхность (212) и множество кромок (213), причем указанные кромки (213) прикреплены по меньшей мере частично к обшивке (240) фюзеляжа самолета (100) и по меньшей мере частично к воздухозаборному каналу (250) двигателя самолета (100),
по меньшей мере один механизм (720), выполненный с возможностью изменения по меньшей мере формы гибкого впуска (120), и
блок (230) обработки данных, выполненный с возможностью управления указанным механизмом (720),
при этом указанный механизм (720) содержит по меньшей мере мешок (721) и по меньшей мере управляющее сочленение (722), которое выполнено с возможностью приема сигнала от блока (230) обработки данных, причем сигнал от блока (230) обработки данных представляет требуемое давление мешка (721), при этом управляющее сочленение (722) выполнено с возможностью изменения давления мешка (721) на требуемое давление мешка (721).
2. Воздухозаборник (110) двигателя самолета (100) по п. 1, в котором по меньшей мере одно из гибкости и прочности деформируемого материала гибкого впуска (120) определено на основании формы гибкого впуска (120).
3. Воздухозаборник (110) двигателя самолета (100) по п. 2, в котором деформируемый материал гибкого впуска (120) содержит по меньшей мере две части, имеющие одинаковую или разную гибкость и прочность.
4. Воздухозаборник (110) двигателя самолета (100) по одному из пп. 1-3, в котором гибкий впуск (120) прикреплен к обшивке (240) фюзеляжа и воздухозаборному каналу (250) двигателя с обеспечением непрерывности внешней поверхности (211) гибкого впуска (120) по меньшей мере с поверхностью обшивки (240) фюзеляжа самолета (100) и по меньшей мере поверхностью воздухозаборного канала (250) двигателя самолета (100).
5. Воздухозаборник (110) двигателя самолета (100) по п. 1, в котором блок (230) обработки данных выполнен с возможностью приема множества параметров (610) полета самолета (100),
при этом блок (230) обработки данных выполнен с возможностью приема по меньшей мере информации из базы (620) данных, причем информация из базы (620) данных содержит по меньшей мере полетные условия (621) и давление мешка (721),
причем блок (230) обработки данных выполнен с возможностью сравнения информации из базы (620) данных с полученными параметрами (610) полета и идентификации (630) требуемого давления мешка (721),
при этом блок (230) обработки данных выполнен с возможностью управления (650) управляющим сочленением (331, 722).
6. Воздухозаборник (110) двигателя самолета (100) по п. 1, в котором форма гибкого впуска основана по меньшей мере на одном из результатов гидрогазодинамического моделирования во время проектирования самолета (100).
7. Воздухозаборник (110) двигателя самолета (100) по п. 6, в котором гидрогазодинамическое моделирование включает по меньшей мере одно из численного, компьютерного и экспериментального гидрогазодинамического моделирования.
8. Воздухозаборник (110) двигателя самолета (100) по п. 7, в котором гидрогазодинамическое моделирование выполнено для всех условий полета, определенных в проектном профиле полета и проектных режимах полета самолета (100).
9. Способ работы воздухозаборника (110) двигателя самолета (100) по любому из пп. 1-8, включающий следующие этапы:
прием множества полетных параметров (610) самолета (100);
сравнение базы (620) данных для принятых полетных параметров (610) самолета (100) для давления мешка (721), при этом база данных (620) содержит множество условий (621) полета и по меньшей мере соответствующее давление мешка (721), причем множество параметров (621) полета включает по меньшей мере условия полета, определенные в проектном профиле полета и проектных режимах полета самолета (100);
управление давлением мешка (721) до давления, подобного давлению мешка (721) в базе (620) данных, соответствующему принятым параметрам (610) полета самолета (100).
| Разделительное покрытие дляМОдЕльНОй ОСНАСТКи | 1979 |
|
SU810357A1 |
| US 0004991795 A1, 12.02.1991 | |||
| GB 1480366 A, 20.07.1977 | |||
| CN 104384288 A, 04.03.2015 | |||
| ВОЗДУХОЗАБОРНИК | 1983 |
|
RU2078717C1 |

