Изобретение относится к области радиолокации и может быть использовано для измерения скорости полета маневрирующего беспилотного летательного аппарата (БПЛА) малого класса типа мультикоптер и дальности до него в дальней и ближней зоне относительно охраняемого объекта.
Известен способ функционирования когерентно-импульсного устройства радиолокационной станции, заключающийся в формировании с помощью задающего генератора сигнала, преобразовании его в высокочастотный сигнал путем умножении частоты, усилении по мощности и излучении в пространство, приеме отраженного от воздушной цели радиолокационного сигнала, его преобразовании на промежуточную частоту, усилении и фазовом детектировании для последующей обработки в приемном тракте БРЛС [1].
Недостатком данного способа функционирования когерентно-импульсного устройства радиолокационной станции являются ограниченные функциональные возможности по измерению дальности до маневрирующего БПЛА малого класса типа мультикоптер в ближней зоне относительно охраняемого объекта (от 500 м и менее).
Известен способ функционирования импульсно-доплеровской радиолокационной станции, заключающийся в формировании высокочастотной последовательности зондирующих импульсов, их усилении по мощности, излучении в пространство, приеме, усилении, преобразовании отраженных сигналов на промежуточные частоты, их селекции по дальности и доплеровской частоте, преобразовании сигналов в цифровую форму с последующем их спектральным анализом [2].
Недостатком данного способа функционирования импульсно-доплеровской радиолокационной станции являются ограниченные функциональные возможности по измерению дальности до интенсивно маневрирующего БПЛА малого класса типа мультикоптер в ближней зоне относительно охраняемого объекта.
Действительно, в дальней зоне относительно охраняемого объекта (от 3000 м и до 500 м) БПЛА малого класса типа мультикоптер осуществляет, как правило, стационарный полет к охраняемому объекту, без интенсивного маневрирования. В этом случае измерение скорости его полета и дальности до него может успешно осуществляться с помощью известного [2] способа функционирования импульсно-доплеровской радиолокационной станции. При подлете мультикоптера к ближней зоне относительно охраняемого объекта (менее 500 м) нахождении его непосредственно в ней им осуществляется интенсивное маневрирование с целью обеспечения скрытности подлета к охраняемому объекту. В этом случае (при полете мультикоптера в ближней зоне относительно охраняемого объекта) функционирование импульсно-доплеровской радиолокационной станции малоэффективно при измерении дальности до мультикоптера в ближней зоне относительно охраняемого объекта, а эффективным является функционирование радиолокационной станции с непрерывным излучением при измерении дальности до мультикоптера в ближней зоне с компенсацией доплеровской частоты, обусловленной скоростью его полета.
Таким образом, радиолокационная система (РЛС) должна объединять импульсно-доплеровскую радиолокационную станцию при измерении скорости полета мультикоптера и дальности до него в дальней зоне относительно охраняемого объекта и радиолокационную станцию с непрерывным излучением при измерении дальности до интенсивно маневрирующего мультикоптера в ближней зоне относительно охраняемого объекта.
Цель изобретения - расширение функциональных возможностей радиолокационной системы, объединяющей импульсно-доплеровскую радиолокационную станцию и радиолокационную станцию с непрерывным излучением, при измерении скорости полета БПЛА малого класса типа мультикоптер и дальности до него в дальней и ближней зоне относительно охраняемого объекта.
Указанная цель достигается тем, что в способе функционирования РЛС при измерении скорости полета БПЛА малого класса типа мультикоптер и дальности до него, заключающимся в формировании высокочастотной последовательности зондирующих импульсов на несущей частоте fн(ИД), их усилении по мощности, излучении с помощью первой приемо-передающей антенны в направлении воздушной цели - мультикоптера при его первоначальном полете в дальней зоне относительно охраняемого объекта, приеме, усилении, преобразовании отраженных сигналов на промежуточные частоты, их селекции по дальности и доплеровской частоте при измерении соответственно дальности до мультикоптера и скорости его полета в дальней зоне относительно охраняемого объекта, дополнительно измеренное значение текущей дальности ДТЕК до мультикоптера сравнивается с априорно заданной верхней границей дальности ДБЗ ближней зоны относительно охраняемого объекта, при выполнении условия ДТЕК>ДБЗ, что соответствует полету мультикоптера в дальней зоне относительно охраняемого объекта, на выходе РЛС формируются измеренные значения скорости полета мультикоптера и дальности до него при функционировании РЛС в импульсно-доплеровском режиме, при достижении мультикоптером верхней границы ближней зоны, когда ДТЕК=ДБЗ, что соответствует перелету мультикоптера из дальней зоны в ближнюю зону относительно охраняемого объекта, дополнительно к импульсно-доплеровскому режиму работы РЛС, осуществляется включение режима ее работы с непрерывным излучением зондирующего сигнала, для чего формируется модулированный по периодическому закону непрерывный высокочастотной зондирующий сигнал с несущей частотой fн(НИ), отличной от несущей частоты последовательности зондирующих импульсов fн(ИД), формируемых при работе РЛС в импульсно-доплеровском режиме, осуществляется его усиление по мощности и излучение с помощью второй приемопередающей антенны в направлении воздушной цели - мультикоптера при его полете в ближней зоне относительно охраняемого объекта, прием отраженных от мультикоптера сигналов, их усиление, преобразование на промежуточные частоты и выделение сигнала разностной частоты fp, определяемой, как

где
Fм и Δf м - соответственно частота модуляции и величина девиации частоты;
с - скорость света;
fд(НИ)=2Vfн(НИ)/с доплеровская частота, обусловленная скоростью V полета мульткоптера в ближней зоне и работе РЛС в режиме непрерывного излучения зондирующих сигналов,
измерение разностной частоты fр, компенсация доплеровскои частоты fд(НИ) с помощью радиолокационной системы, функционирующей в импульсно-доплеровском режиме, путем введения поправки, равной fд(НИ)=fн(НИ)fд(ИД)/fн(ИД), где fд(ИД)=2V fн(ИД)/с - доплеровская частота, обусловленная скоростью V полета мульткоптера в ближней зоне и работе РЛС в импульсно-доплеровском режиме, преобразование скомпенсированной по доплеровской частоте разностной частоты fp(к) в значение измеренной дальности до мультикоптера при его полете в ближней зоне относительно охраняемого объекта в соответствии с выражением

формирование при полете мультикоптера в ближней зоне относительно охраняемого объекта на выходе РЛС измеренных значений скорости полета мультикоптера при функционировании РЛС в импульсно-доплеровском режиме и дальности до него при совместном функционировании РЛС в импульсно-доплеровском режиме и режиме с непрерывным излучением зондирующего сигнала.
Новыми признаками, обладающими существенными отличиями, являются.
1. Сравнение измеренного значения текущей дальности ДТЕК до мультикоптера с априорно заданной верхней границей дальности ДБЗ ближней зоны относительно охраняемого объекта При выполнении условия ДТЕК>ДБЗ, что соответствует полету мультикоптера в дальней зоне относительно охраняемого объекта, на выходе РЛС формируются измеренные значения скорости полета мультикоптера и дальности до него при функционировании РЛС в импульсно-доплеровском режиме.
2. Дополнительное включение к импульсно-доплеровскому режиму работы РЛС режима ее работы с непрерывным излучением зондирующего сигнала при достижении мультикоптером априорно заданной верхней границы ближней зоны, когда ДТЕК=ДБЗ, что соответствует перелету мультикоптера из дальней зоны в ближнюю зону относительно охраняемого объекта
3. Измерение при работе РЛС с непрерывным излучением зондирующего сигнала разностной частоты, определяемой выражением (1), при полете мультикоптера в ближней зоне с компенсацией с помощью РЛС, функционирующей в импульсно-доплеровском режиме, доплеровской частоты fд(НИ), равной fд(НИ)=fн(НИ)fд(ИД)/fн(ИД) и обусловленной полетом мультикоптера в ближней зоне относительно охраняемого объекта и работе РЛС в импульсно-доплеровском режиме.
4. Преобразование скомпенсированной по доплеровской частоте разностной частоты fp(к) в значение измеренной дальности до мультикоптера при его полете в ближней зоне относительно охраняемого объекта в соответствии с выражением (2) и формирование на выходе РЛС измеренных значений скорости полета мультикоптера при ее функционировании в импульсно-доплеровском режиме и дальности до него при совместном функционировании РЛС в импульсно-доплеровском режиме и режиме с непрерывным излучением зондирующего сигнала.
Данные признаки обладают существенными отличиями, так как в известных способах не обнаружены.
Применение новых признаков позволит расширить функциональные возможности РЛС, объединяющей импульсно-доплеровскую радиолокационную станцию и радиолокационную станцию с непрерывным излучением, при измерении скорости полета БПЛА малого класса типа мультикоптер и дальности до него в дальней и ближней зоне относительно охраняемого объекта.
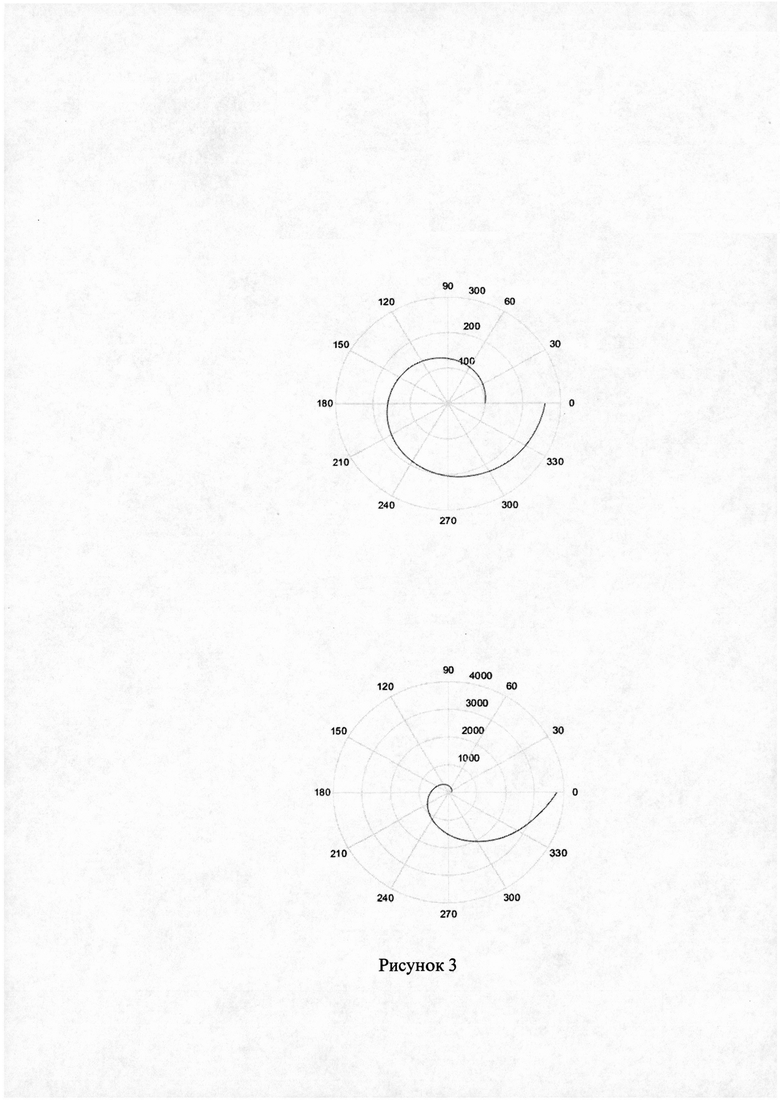
На рисунке 1 представлена блок-схема, поясняющая предлагаемый способ функционирования радиолокационной системы при измерении скорости полета БПЛА малого класса типа мультикоптер и дальности до него, на рисунке 2 - внешний вид БПЛА малого класса типа мультикоптер, на рисунке 3 - типичные траектории полета интенсивно маневрирующего БПЛА малого класса типа мультикоптер в ближней зоне относительно охраняемого объекта.
Способ функционирования РЛС при измерении скорости полета БПЛА малого класса типа мультикоптер и дальности до него реализуется следующим образом (рисунок 1).
С помощью задающего генератора 1 (ЗГ), синхронизатора 2 (С) и первого модулятора 3 (М) формируются высокочастотные последовательности зондирующих импульсов на несущей частоте fн(ИД), которые усиливаются в первом усилителе 4 мощности высокой частоты (УМ ВЧ) и через первый антенный переключатель 5 (АП) излучаются первой приемо-передающей антенной 6 (А) в направлении воздушной цели - мультикоптера (рисунок 2) при его первоначальном полете в дальней зоне относительно охраняемого объекта (от 3000 м до 500 м).
Отраженные от воздушной цели - мультикоптера сигналы (рисунок 1) принимаются первой приемо-передающей антенной 6 и через первый антенный переключатель 5 поступают в приемник импульсно-доплеровской радиолокационной станции, где усиливаются в усилителе 7 высокой частоты (УВЧ), преобразуются в тракте 8 преобразования на промежуточные частоты (ТП ПЧ), селектируются по дальности в селекторе 9 дальности (СД) с помощью селекторных импульсов, поступающих на его вход с выхода синхронизатора 2, а также селектируются по доплеровской частоте в преобразователе 10 (ПР), на вход которого поступают значения углов ориентации диаграммы направленности антенны в вертикальной и горизонтальной плоскостях с выхода угломерного канала (на схеме не показан). В аналого-цифровом преобразователе 11 (АЦП) сигнал из аналоговой формы преобразуется в цифровую форму, который поступает на вход блока 12 быстрого преобразования Фурье (БПФ), где осуществляется его спектральный анализ, и с его выхода значение доплеровской частоты, равное fд(ИД)=2 V fн(ИД)/c, поступает на первый 13 вход коммутатора 14 (К), где преобразуется в значение скорости полета мультикоптера в дальней зоне относительно охраняемого объекта при работе РЛС в импульсно-доплеровском режиме.
Одновременно в измерителе 15 дальности (Изм. Д) осуществляется измерение текущей дальности ДТЕК до мультикоптера, значение которой поступает на второй вход 16 коммутатора 14 и на первый вход 17 анализатора 18 (Ан), где сравнивается с априорно заданным значением верхней границей дальности ДБЗ ближней зоны (500 м) относительно охраняемого объекта, подаваемого на второй вход 19 анализатора 18. При выполнении условия ДТЕК>ДБЗ (ДТЕК>500 м), что соответствует полету мультикоптера в дальней зоне относительно охраняемого объекта, на выходе анализатора 18 формируются разрешающие сигналы для выдачи потребителям значений скорости полета мультикоптера в дальней зоне и дальности до него при работе РЛС в импульсно-доплеровском режиме, а также запрещающим сигналом для дополнительного включения режима работы РЛС с непрерывным зондирующим сигналом.
При достижении мультикоптером априорно заданной верхней границы ближней зоны, когда ДТЕК=ДБЗ (ДТЕК=ДБЗ=500 м), что соответствует перелету мультикоптера из дальней зоны в ближнюю зону относительно охраняемого объекта, на выходе анализатора 18 формируется запрещающий сигнал для выдачи потребителям значения дальности до мультикоптера, формируемой при работе РЛС в импульсно-доплеровском режиме, и разрешающие сигналы для выдачи потребителям значения скорости полета мультикоптера в ближней зоне относительно охраняемого объекта, а также дополнительного включения к импульсно-доплеровскому режиму работы РЛС режима ее работы с непрерывным излучением зондирующего сигнала. С этой целью с помощью второго модулятора 20 и генератора высокой частоты 21 (ГВЧ) формируется модулированный по периодическому закону непрерывный высокочастотный зондирующий сигнал с несущей частотой fн(НИ), отличной от несущей частоты fн(ИД) последовательности зондирующих импульсов, формируемых при работе РЛС в импульсно-доплеровском режиме, осуществляется его усиление во втором усилителе 22 мощности высокой частоты и через второй антенный переключатель 23 - излучение с помощью второй приемо-передающей антенны 24 в направлении воздушной цели - мультикоптера при его интенсивном маневрировании (рисунок 3) в ближней зоне относительно охраняемого объекта (от 500 м и менее).
Отраженные от воздушной цели - мультикоптера сигналы (рисунок 1) принимаются второй приемо-передающей антенной 24 и через второй антенный переключатель 23 поступают в приемник 25 (ПРМ) радиолокационной станции, работающей в непрерывном режиме, где осуществляется усиление, преобразование отраженных сигналов на промежуточные частоты и выделение сигнала разностной частоты fp, определяемой выражением (1).
В измерителе 26 (Изм.) осуществляется измерение разностной частоты fp, значение которой компенсируется в компенсаторе 27 (Комп.) доплеровской частоты fд(НИ) с помощью РЛС, функционирующей в импульсно-доплеровском режиме, путем введения поправки, равной fд(НИ)=fн(НИ)fд(ИД)/fн(ИД), где fд(ИД)=2V fн(ИД)/с - доплеровская частота, обусловленная скоростью V полета мульткоптера в ближней зоне при работе РЛС в импульсно-доплеровском режиме. Значение доплеровской частоты fд(ИД) с выхода блока 12 БПФ поступает на вход компенсатора 27. В преобразователе 28 (Пр. fp(к)) осуществляется преобразование скомпенсированной по доплеровской частоте fд(НИ) разностной частоты fp(к) в значение измеренной дальности до мультикоптера при его полете в ближней зоне относительно охраняемого объекта в соответствии с выражением (2).
В результате, при полете мультикоптера в ближней зоне относительно охраняемого объекта потребителям осуществляется выдача измеренных значений скорости полета мультикоптера при ее функционировании в импульсно-доплеровском режиме и дальности до него при совместном функционировании РЛС в импульсно-доплеровском режиме и режиме с непрерывным излучением зондирующего сигнала.
Таким образом, предлагаемое изобретение позволит расширить функциональные возможности РЛС, объединяющей импульсно-доплеровскую радиолокационную станцию и радиолокационную станцию с непрерывным излучением, при измерении скорости полета БПЛА малого класса типа мультикоптер и дальности до него в дальней (от 3000 м до 500 м) и ближней (от 500 м и менее) зоне относительно охраняемого объекта.
Источники информации
1. Авиационные радиолокационные комплексы и системы: учебник для слушателей и курсантов ВУЗов ВВС / П.И. Дудник, Г.С. Кондратенков, Б.Г. Татарский, А.Р. Ильчук, А.А. Герасимов. Под ред. П.И. Дудника. - М.: изд. ВВИА им. проф. Н.Е. Жуковского, 2006, страницы 527-528, рисунок 11.4 (аналог).
2. Авиационные радиолокационные комплексы и системы: учебник для слушателей и курсантов ВУЗов ВВС / П.И. Дудник, Г.С. Кондратенков, Б.Г. Татарский, А.Р. Ильчук, А.А. Герасимов. Под ред. П.И. Дудника. - М.: изд. ВВИА им. проф. Н.Е. Жуковского, 2006, страницы 630 (формула (12.89), 639-641, рисунок 12.39 (прототип).
3. В.В. Васин, О.В. Власов, В.В. Григорин-Рябов, П.И. Дудник, Б.М. Степанов. Радиолокационные устройства (теория и принципы построения). - М.: «Советское радио», 1970 (страница 18 формулы 2.3, 2.4; страница 404 формула 15.24).
К рисунку 1
1 ЗГ - задающий генератор; 2 С - синхронизатор; 3,20 М - модулятор; 4,22 УМ ВЧ - усилитель мощности высокой частоты; 5, 23 АП - антенный переключатель; 6,24 А - приемо-передающая антенна; 7 УВЧ - усилитель высокой частоты; 8 ТП ПЧ - тракт преобразования на промежуточные частоты; 9 СД - селектор дальности; 10 ПР - преобразователь; 11 АЦП -аналого-цифровой преобразователь; 12 БПФ - блок быстрого преобразования Фурье; 14 К - коммутатор; 15 Изм. Д - измеритель дальности; 18 Ан. -анализатор; 21 ГВЧ - генератор высокой частоты; 25 ПРМ - приемник; 26 Изм. - измеритель; 27 Комп.- компенсатор; 28 Пр. fp(к) - преобразователь.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОДНОЗНАЧНОГО ИЗМЕРЕНИЯ РАДИАЛЬНОЙ СКОРОСТИ ЦЕЛИ В КОГЕРЕНТНО-ИМПУЛЬСНОЙ РАДИОЛОКАЦИОННОЙ СТАНЦИИ | 2014 |
|
RU2574079C1 |
| СПОСОБ ФОРМИРОВАНИЯ ФИКСИРОВАННОЙ СПЕКТРАЛЬНОЙ ЗОНЫ, СВОБОДНОЙ ОТ ПОМЕХ ОТ ПОДСТИЛАЮЩЕЙ ПОВЕРХНОСТИ В БОРТОВЫХ ИМПУЛЬСНО-ДОПЛЕРОВСКИХ РАДИОЛОКАТОРАХ | 2023 |
|
RU2834733C1 |
| УСТРОЙСТВО ПЕРВИЧНОЙ ОБРАБОТКИ СИГНАЛОВ РАДИОЛОКАЦИОННОЙ СТАНЦИИ, ИСПОЛЬЗУЮЩЕЙ ДВЕ ПОСЛЕДОВАТЕЛЬНОСТИ ЗОНДИРУЮЩИХ ИМПУЛЬСОВ | 2005 |
|
RU2305853C2 |
| РАДИОЛОКАЦИОННАЯ СИСТЕМА ОХРАНЫ ВОЗДУШНОГО ПЕРИМЕТРА | 2023 |
|
RU2824853C1 |
| РАДИОЛОКАЦИОННЫЙ СПОСОБ ОБНАРУЖЕНИЯ МАЛОЗАМЕТНЫХ БЕСПИЛОТНЫХ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2013 |
|
RU2534217C1 |
| Радиолокационный способ обнаружения малозаметных целей в импульсно-доплеровской РЛС с ФАР | 2019 |
|
RU2711115C1 |
| СПОСОБ ОБЗОРНОЙ ИМПУЛЬСНО-ДОПЛЕРОВСКОЙ РАДИОЛОКАЦИИ ЦЕЛЕЙ НА ФОНЕ ОТРАЖЕНИЙ ОТ ЗЕМНОЙ ПОВЕРХНОСТИ | 2009 |
|
RU2449307C2 |
| СПОСОБ ОДНОВРЕМЕННОГО ИЗМЕРЕНИЯ ДАЛЬНОСТИ, СКОРОСТИ И УСКОРЕНИЯ МАЛОСКОРОСТНОЙ МАНЕВРИРУЮЩЕЙ ВОЗДУШНОЙ ЦЕЛИ В ИМПУЛЬСНО-ДОПЛЕРОВСКИХ РАДИОЛОКАЦИОННЫХ СТАНЦИЯХ ПРИ ВЫСОКОЙ ЧАСТОТЕ ПОВТОРЕНИЯ ИМПУЛЬСОВ И ЛИНЕЙНОЙ ЧАСТОТНОЙ МОДУЛЯЦИИ | 2018 |
|
RU2692912C1 |
| СПОСОБ ПЕРВИЧНОЙ ИМПУЛЬСНО-ДОПЛЕРОВСКОЙ ДАЛЬНОМЕТРИИ ЦЕЛЕЙ НА ФОНЕ УЗКОПОЛОСНЫХ ПАССИВНЫХ ПОМЕХ | 2016 |
|
RU2641727C1 |
| СПОСОБ ИСПЫТАНИЯ СИСТЕМ ОБНАРУЖЕНИЯ КАНАЛА УПРАВЛЕНИЯ БЕСПИЛОТНЫХ ЛЕТАТЕЛЬНЫХ АППАРАТОВ НА ОХРАНЯЕМЫХ ОБЪЕКТАХ | 2023 |
|
RU2821601C1 |


Изобретение относится к области радиолокации и может быть использовано для измерения скорости полета беспилотного летательного аппарата малого класса типа мультикоптер (МК) и дальности до него в дальней и ближней зонах (ДЗ и БЗ) относительно охраняемого объекта (ОБ). Достигаемый технический результат - расширение функциональных возможностей радиолокационной системы (РЛС), объединяющей импульсно-доплеровскую (ИД) радиолокационную станцию и радиолокационную станцию с непрерывным излучением (НИ), при измерении скорости полета МК и дальности до него в ДЗ и БЗ относительно ОБ. Способ заключается в формировании высокочастотной последовательности зондирующих импульсов на несущей частоте fн(ИД), их усилении, излучении с помощью первой приемо-передающей антенны в направлении воздушной цели - мультикоптера (ВЦ-МК) при его первоначальном полете в ДЗ относительно ОБ, приеме, усилении, преобразовании отраженных сигналов на промежуточные частоты, их селекции по дальности и доплеровской частоте, измеренная текущая дальность ДТЕК до МК сравнивается с верхней границей дальности ДБЗ ближней зоны относительно ОБ, при ДТЕК>ДБЗ на выходе РЛС формируются значения скорости полета МК и дальности до него при функционировании РЛС в ИД режиме, при ДТЕК=ДБЗ дополнительно к ИД режиму работы РЛС включается режим ее работы с НИ зондирующего сигнала, для чего формируется модулированный по периодическому закону непрерывный высокочастотный зондирующий сигнал с несущей частотой fн(НИ), осуществляется его усиление и излучение с помощью второй приемо-передающей антенны в направлении ВЦ-МК при его полете в БЗ относительно ОБ, осуществляется прием отраженных от МК сигналов, их усиление, преобразование на промежуточные частоты и выделение сигнала разностной частоты fp=(2FмΔf м ДТЕК/с)+fд(НИ), где Fм и Δf м - соответственно частота модуляции и величина девиации частоты; с - скорость света; fд(НИ)=2 V fн(НИ)/c - доплеровская частота, обусловленная скоростью V полета МК в БЗ и работе РЛС в режиме НИ зондирующих сигналов, измерение разностной частоты fp, компенсация доплеровской частоты fд(НИ) с помощью РЛС, функционирующей в ИД режиме, путем введения поправки fд(НИ)=fн(НИ)fд(ИД)/fн(ИД), где fд(ИД)=2Vfн(ИД)/с - доплеровская частота, обусловленная скоростью V полета МК в БЗ и работе РЛС в ИД режиме, преобразование скомпенсированной по доплеровской частоте разностной частоты fp(к) в дальность до МК при его полете в БЗ в соответствии с выражением ДТЕК=с fp(к) / 2FмΔf м, формирование при полете МК в БЗ относительно ОБ на выходе РЛС значений скорости полета МК при функционировании РЛС в ИД режиме и дальности до него при совместном функционировании РЛС в ИД режиме и режиме с НИ зондирующего сигнала. 3 ил.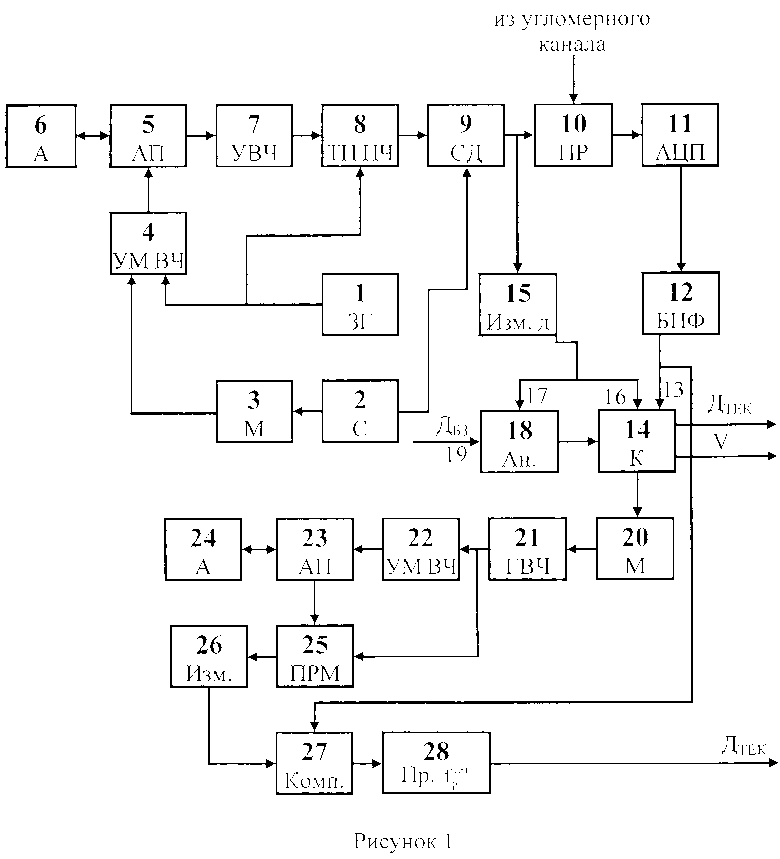
Способ функционирования радиолокационной системы при измерении скорости полета беспилотного летательного аппарата малого класса типа мультикоптер и дальности до него, заключающийся в формировании высокочастотной последовательности зондирующих импульсов на несущей частоте fн(ИД), их усилении по мощности, излучении с помощью первой приемо-передающей антенны в направлении воздушной цели - мультикоптера при его первоначальном полете в дальней зоне относительно охраняемого объекта, приеме, усилении, преобразовании отраженных сигналов на промежуточные частоты, их селекции по дальности и доплеровской частоте при измерении соответственно дальности до мультикоптера и скорости его полета в дальней зоне относительно охраняемого объекта, отличающийся тем, что измеренное значение текущей дальности ДТЕК до мультикоптера сравнивается с априорно заданной верхней границей дальности ДБЗ ближней зоны относительно охраняемого объекта, при выполнении условия ДТЕК>ДБЗ, что соответствует полету мультикоптера в дальней зоне относительно охраняемого объекта, на выходе радиолокационной системы формируются измеренные значения скорости полета мультикоптера и дальности до него при функционировании радиолокационной системы в импульсно-доплеровском режиме, при достижении мультикоптером верхней границы ближней зоны, когда ДТЕК=ДБЗ, что соответствует перелету мультикоптера из дальней зоны в ближнюю зону относительно охраняемого объекта, дополнительно к импульсно-доплеровскому режиму работы радиолокационной системы осуществляется включение режима ее работы с непрерывным излучением зондирующего сигнала, для чего формируется модулированный по периодическому закону непрерывный высокочастотный зондирующий сигнал с несущей частотой fн(НИ) отличной от несущей частоты последовательности зондирующих импульсов fн(ИД), формируемых при работе радиолокационной системы в импульсно-доплеровском режиме, осуществляется его усиление по мощности и излучение с помощью второй приемо-передающей антенны в направлении воздушной цели - мультикоптера при его полете в ближней зоне относительно охраняемого объекта, прием отраженных от мультикоптера сигналов, их усиление, преобразование на промежуточные частоты и выделение сигнала разностной частоты fр, определяемой, как

где
Fм и Δfм - соответственно частота модуляции и величина девиации частоты;
с - скорость света;
fд(НИ)=2Vfн(НИ)/c - доплеровская частота, обусловленная скоростью V полета мульткоптера в ближней зоне и работе радиолокационной системы в режиме непрерывного излучения зондирующих сигналов,
измерение разностной частоты fр, компенсация доплеровской частоты fд(НИ) с помощью радиолокационной системы, функционирующей в импульсно-доплеровском режиме, путем введения поправки, равной fд(НИ)=fн(НИ)fд(ИД)/fн(ИД), где fд(ИД)=2Vfн(ИД)/с - доплеровская частота, обусловленная скоростью V полета мульткоптера в ближней зоне и работе радиолокационной системы в импульсно-доплеровском режиме, преобразование скомпенсированной по доплеровской частоте fд(НИ) разностной частоты fp(к) в значение измеренной дальности до мультикоптера при его полете в ближней зоне относительно охраняемого объекта в соответствии с выражением

формирование при полете мультикоптера в ближней зоне относительно охраняемого объекта на выходе радиолокационной системы измеренных значений скорости полета мультикоптера при функционировании радиолокационной системы в импульсно-доплеровском режиме и дальности до него при совместном функционировании радиолокационной системы в импульсно-доплеровском режиме и режиме с непрерывным излучением зондирующего сигнала.
| Авиационные радиолокационные комплексы и системы | |||
| Под ред | |||
| П.И.ДУДНИКА, Москва, 2006, изд | |||
| ВВИА им | |||
| проф | |||
| Н.Е.Жуковского, с.639-641, рис.12.39 | |||
| СПОСОБ ИЗМЕРЕНИЯ ДАЛЬНОСТИ И СКОРОСТИ ИМПУЛЬСНО-ДОПЛЕРОВСКОЙ РАДИОЛОКАЦИОННОЙ СТАНЦИЕЙ | 2001 |
|
RU2206102C1 |
| Способ измерения скорости полёта воздушного объекта и РЛС для его осуществления | 2015 |
|
RU2608748C1 |
| СПОСОБ ФУНКЦИОНИРОВАНИЯ РАДИОЛОКАЦИОННОЙ СИСТЕМЫ НА БАЗЕ РАДИОЛОКАЦИОННЫХ СТАНЦИЙ С УПРАВЛЯЕМЫМИ ПАРАМЕТРАМИ ИЗЛУЧЕНИЯ | 2013 |
|
RU2543511C1 |
| РАДИОЛОКАЦИОННЫЙ СПОСОБ ОБНАРУЖЕНИЯ МАЛОЗАМЕТНЫХ БЕСПИЛОТНЫХ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2013 |
|
RU2534217C1 |
| US 8305256 B1, 06.11.2012 | |||
| US 6147638 A, 14.11.2000 | |||
| WO 2006133268 A2, 14.12.2006. | |||

