[Область техники, к которой относится изобретение]
[0001]
Настоящее изобретение относится к способу управления парковкой и устройству управления парковкой.
[Уровень техники]
[0002]
Известна система дистанционного управления транспортным средством, которая функционирует для разрешения активации блока управления транспортного средства, когда успешно выполнена аутентификация двух устройств связи электронного ключа и устройства мобильной связи (патентный документ 1: JP2016–97927A).
[Документ из уровня техники]
[Патентный Документ]
[0003]
[Патентный Документ 1] JP2016–97927A
[Раскрытие изобретения]
[Проблемы, решаемые изобретением]
[0004]
В вышеупомянутой обычной системе ничего не предусмотрено для случая, когда условия связи вокруг транспортного средства являются плохими.
[0005]
Задача, решаемая настоящим изобретением, состоит в выполнении процесса парковки посредством дистанционного управления, даже когда условия связи вокруг транспортного средства являются плохими.
[Средства для решения проблем]
[0006]
Настоящее изобретение решает вышеупомянутую задачу посредством обмена первой информацией через первый канал связи, причем первая информация включает в себя операционную информацию; обмена второй информацией через второй канал связи, причем вторая информация включает в себя информацию представления в отношении управления парковкой, причем информация представления представляется на терминале управления; и если первое значение оценки в отношении качества связи для первого канала связи меньше первой пороговой величины, выполняется обмен по меньшей мере частью первой информации через один или более каналов связи, отличных от первого канала связи, причём если второе значение оценки в отношении качества связи для второго канала связи меньше второй пороговой величины, выполняется обмен по меньшей мере частью второй информации через один или более каналов связи, отличных от второго канала связи, и уменьшается объем информации для первой информации и/или второй информации.
[Эффект изобретения]
[0007]
Согласно настоящему изобретению может выполняться управление парковкой даже когда качество связи низкое.
[Краткое описание чертежей]
[0008]
На фиг.1 показана блок–схема, иллюстрирующая пример системы управления парковкой в соответствии с одним или более вариантами осуществления настоящего изобретения.
На фиг.2 показана блок–схема, иллюстрирующая пример процедуры управления, выполняемой системой управления парковкой в соответствии с одним или более вариантами осуществления настоящего изобретения.
Фиг. 3 является схемой, иллюстрирующей примеры каналов связи.
Фиг. 4А – первая схема для описания процесса переключения каналов связи.
Фиг. 4B – вторая схема для описания процесса переключения каналов связи.
Фиг. 5 является блок–схемой, иллюстрирующей пример процесса переключения каналов связи.
Фиг. 6 является блок–схемой, иллюстрирующей пример процесса ограничения операционной информации.
Фиг. 7А – первая схема для описания процесса ограничения операционной информации.
Фиг. 7B – вторая схема для описания процесса ограничения операционной информации.
Фиг. 7C – третья схема для описания процесса ограничения операционной информации.
Фиг. 8 – блок–схема, иллюстрирующая пример процесса ограничения информации представления.
Фиг. 9А – первая схема для описания процесса ограничения информации представления.
Фиг. 9B – вторая схема для описания процесса ограничения информации представления.
Фиг. 9C – третья схема для описания процесса ограничения информации представления.
На Фиг. 10 показана блок–схема, иллюстрирующая пример процесса изменения информации маршрута парковки/ управления.
Фиг. 11 является схемой для описания процесса изменения информации маршрута парковки/ управления.
[Осуществление изобретения]
[0009]
Ниже с обращением к чертежам будут описаны один или более вариантов осуществления настоящего изобретения . В вариантах осуществления настоящее изобретение будет описано на примере случая, в котором устройство управления парковкой в соответствии с настоящим изобретением применяется в бортовой системе управления парковкой. Устройство управления парковкой также может быть применено в портативном терминале (в таком устройстве, как смартфон или КПК: карманный персональный компьютер), способном обмениваться информацией с бортовым устройством. Способ управления парковкой в соответствии с настоящим изобретением может использоваться в устройстве управления парковкой, которое будет описано ниже.
[0010]
На фиг.1 показана блок–схема системы 1000 управления парковкой, включающей в себя устройство 100 управления парковкой в соответствии с одним или более вариантами осуществления настоящего изобретения. Система 1000 управления парковкой в соответствии с одним или более вариантами осуществления настоящего изобретения включает в себя камеры 1a–1d, устройства 2 измерения расстояния, терминал 5 управления, устройство 100 управления парковкой, контроллер 70 транспортного средства, систему 40 привода, датчик 50 угла поворота рулевого колеса, и датчик 60 скорости транспортного средства. Устройство 100 управления парковкой в соответствии с одним или более вариантами осуществления настоящего изобретения функционирует для управления операцией перемещения (парковки) транспортного средства в парковочное место на основании операционной информации, которая вводится в терминал 5 управления от оператора. В настоящем описании транспортное средство в качестве цели управления парковкой называется транспортным средством V.
[0011]
Терминал 5 управления представляет собой портативный компьютер, который может быть вынесен за пределы транспортного средства и имеет функцию ввода и функцию связи. Терминал 5 управления принимает операционную информацию для управления движением (работой) транспортного средства для парковки. Операционная информация вводится в терминал 5 управления оператором. Движение включает в себя операции для парковки (операции для въезда на парковочное место и выезда из парковочного места). Другими словами, оператор использует терминал 5 управления для ввода операционной информации для выполнения парковки. Операционная информация включает в себя команду для выполнения/прекращения управления парковкой, команду для выбора/изменения целевого парковочного места, команду для выбора/изменения маршрута парковки и другую информацию, необходимую для парковки. Оператор также может побуждать устройство 100 управления парковкой распознавать операционную информацию и может вводить операционную информацию без использования терминала 5 управления, например, посредством жеста оператора.
Терминал 5 управления включает в себя устройство связи и способен обмениваться информацией с устройством 100 управления парковкой и информационным сервером 3. Терминал 5 управления передает операционную информацию, которая вводится в терминал 5 управления оператором за пределами транспортного средства, в устройство 100 управления парковкой через сеть связи, и вводит операционную информацию в устройство 100 управления парковкой. Терминал 5 управления связывается с устройством 100 управления парковкой, используя сигналы, включающие в себя уникальный идентификационный код. Терминал 5 управления определяет частоту радиоволн связи, которые должны быть переданы и приняты, и установление и прерывание связи с устройством 21 связи устройства 100 управления парковкой.
[0012]
Терминал 5 управления включает в себя дисплей 53. Чтобы служить интерфейсом ввода, дисплей 53 представляет различные информационные элементы. Если дисплей 53 является дисплеем типа сенсорной панели, этот дисплей 53 дополнительно включает в себя устройство 52 ввода и имеет функцию приема операционной информации . Терминал 5 управления может быть портативным устройством, таким как смартфон или КПК: карманный персональный компьютер, в котором установлены приложения для приема ввода операционной информации, используемой в способе управления парковкой, в соответствии с одним или более вариантами осуществления настоящего изобретения, и передачи операционной информации в устройство 100 управления парковкой.
[0013]
Информационный сервер 3 является устройством обеспечения информации, предусмотренным в сети, способной к осуществлению связи. Информационный сервер включает в себя устройство 31 связи и запоминающее устройство 32. Запоминающее устройство 32 включает в себя читаемую картографическую информацию 33, информацию 34 о парковке и информацию 35 о препятствиях. Устройство 100 управления парковкой и терминал 5 управления могут обращаться к запоминающему устройству 32 информационного сервера 3 для получения каждого информационного элемента. Устройство 100 управления парковкой и терминал 5 управления могут получать информацию о положении парковочного места, о том, припарковано ли транспортное средство в парковочном месте и т.п., от информационного сервера 3.
[0014]
Устройство 100 управления парковкой в соответствии с одним или более вариантами осуществления настоящего изобретения включает в себя устройство 10 управления, устройство 20 ввода и устройство 30 вывода. Эти компоненты устройства 100 управления парковкой соединены друг с другом через локальную сеть контроллера (CAN) или другую бортовую локальную сеть для взаимного обмена информацией. Устройство 20 ввода включает в себя устройство 21 связи. Устройство 21 связи принимает операционную информацию, передаваемую от внешнего терминала 5 управления, и вводит операционную информацию в устройство 20 ввода. Субъектом, который вводит операционную информацию во внешний терминал 5 управления, может быть человек (пользователь, пассажир, водитель или работник парковочного объекта). Устройство 20 ввода передает принятую операционную информацию в устройство 10 управления. Устройство 30 вывода включает в себя дисплей 31. Устройство 30 вывода сообщает водителю информацию управления парковкой. Дисплей 31 в соответствии с одним или более вариантами осуществления настоящего изобретения представляет собой дисплей типа сенсорной панели, имеющий функцию ввода и функцию вывода. Когда дисплей 31 имеет функцию ввода, он служит в качестве устройства 20 ввода. Даже когда транспортное средство управляется на основе операционной информации, которая вводится в терминал 5 управления от оператора, находящегося за пределами транспортного средства, пользователь (водитель или пассажир) может вводить другой тип операционной информации, такой как информация для аварийной остановки, через устройство 20 ввода. Устройство 30 вывода может включать в себя динамик, который представляет информацию, относящуюся к управлению парковкой.
[0015]
Устройство 10 управления устройства 100 управления парковкой в соответствии с одним или более вариантами осуществления настоящего изобретения представляет собой конкретный компьютер, включающий в себя ROM 12, которая хранит программу управления парковкой, CPU 11 в качестве управляющей схемы, которая выполняет программу, сохраненную в ROM 12, чтобы служить в качестве устройства 100 управления парковкой в соответствии с одним или более вариантами осуществления настоящего изобретения, и RAM 13, которая служит в качестве запоминающего устройства с возможностью осуществления доступа.
[0016]
Программа управления парковкой в соответствии с одним или более вариантами осуществления настоящего изобретения является программой для оценки условий связи в окружении транспортного средства V и выполнения процедуры управления, в которой транспортное средство V управляется для парковки в соответствии с результатом оценки. Эта программа выполняется устройством 10 управления устройства 100 управления парковкой в соответствии с одним или более вариантами осуществления настоящего изобретения.
[0017]
Устройство 100 управления парковкой в соответствии с одним или более вариантами осуществления настоящего изобретения представляет собой устройство типа дистанционного управления, которое принимает операционную информацию от внешнего устройства и управляет движением транспортного средства V для парковки транспортного средства V в заданное парковочное место. Во время этой операции оператор М может находиться за пределами транспортного средства V или также может быть расположен внутри транспортного средства V.
Устройство 100 управления парковкой в соответствии с одним или более вариантами осуществления настоящего изобретения может быть автономного (автоматизированного) типа управления, в котором управление рулевым управлением и управление акселератором/тормозом выполняются автономно. Устройство 100 управления парковкой также может быть полуавтономного типа, в котором управление рулевым управлением выполняется автономно, в то время как водитель выполняет управление акселератором/тормозом. В программе управления парковкой в соответствии с одним или более вариантами осуществления настоящего изобретения оператор может произвольно выбирать целевое парковочное место, или устройство 100 управления парковкой или сторона средства парковки могут автоматически устанавливать целевое парковочное место.
[0018]
В системе 1000 управления парковкой в соответствии с одним или более вариантами осуществления настоящего изобретения устройство 10 управления устройства 100 управления парковкой и терминал 5 управления обмениваются информацией друг с другом и выполняют процесс управления парковкой для парковки транспортного средства V в соответствии с управляющей командой для движения транспортного средства по маршруту парковки. Управляющая команда основана на операционной информации, которая вводится в терминал 5 управления, расположенный за пределами транспортного средства V. Операционная информация, включающая в себя операционную команду для выполнения процесса управления парковкой, вводится оператором в терминал 5 управления. До тех пор, пока процесс управления парковкой не будет завершен после того, как операционная информация для запуска команды управления парковкой введена в терминал 5 управления, между терминалом 5 управления и устройством 10 управления осуществляется обмен необходимой информацией представления, относящейся к управлению парковкой. Информация представления включает в себя операционную информацию, которая объявляет намерения оператора, информацию для подтверждения обмена информацией, информацию представления, обеспечиваемую оператору для принятия решения, и информацию для подтверждения намерения оператора.
[0019]
Устройство 10 управления имеет функции выполнения процесса получения операционной информации, процесса вычисления значения оценки качества связи для канала связи, процесса в соответствии со значением оценки, процесса вычисления маршрута парковки и процесса вычисления управляющей команды для движения транспортного средства V по маршруту парковки. Процесс вычисления значения оценки качества связи для канала связи и процесс в соответствии со значением оценки могут выполняться терминалом 5 управления. Терминал 5 управления в соответствии с одним или более вариантами осуществления настоящего изобретения также является компьютером, который включает в себя CPU, RAM и ROM. Процесс в соответствии со значением оценки качества связи включает в себя процесс переключения каналов связи, процесс уменьшения объема информации, подлежащей передаче и приёму, процесс вычисления маршрута парковки с измененными параметрами и процесс вычисления управляющей команды с измененными параметрами. Каждый из вышеупомянутых процессов выполняется посредством взаимодействия программного обеспечения для реализации процесса и вышеописанного аппаратного обеспечения.
[0020]
Устройство 10 управления в соответствии с одним или более вариантами осуществления настоящего изобретения реализует способ управления парковкой для парковки транспортного средства V в соответствии с управляющей командой для движения по маршруту парковки. Управляющая команда основана на операционной информации, которая вводится в терминал управления, расположенный за пределами транспортного средства V. Устройство 10 управления выполняет обмен первой информацией через первый канал связи и обмен второй информацией через второй канал связи. Первая информация включает в себя операционную информацию. Вторая информация включает в себя информацию представления, относящуюся к управлению парковкой. Информация представления представляется на терминале управления. Когда первое значение оценки в отношении качества связи для первого канала связи меньше первой пороговой величины, устройство 10 управления выполняет обмен по меньшей мере частью первой информации через один или более каналов связи, отличных от первого канала связи. Когда второе значение оценки в отношении качества связи для второго канала связи меньше второй пороговой величины, устройство 10 управления выполняет обмен по меньшей мере частью второй информации через один или более каналов связи, отличных от второго канала связи. Когда выполняется процесс переключения каналов связи, то есть когда качество связи для первого канала связи и/или второго канала связи меньше заданной пороговой величины, устройство 10 управления дополнительно функционирует для выполнения процесса уменьшения объема информации для первой информации и/или второй информации в дополнение к вышеупомянутой операции. Вместе с процессом уменьшения объёма информации или независимо от него, устройство 10 управления функционирует для выполнения процесса изменения маршрута парковки или управляющей команды для движения по маршруту парковки при выполнении процесса переключения каналов связи. В этом случае транспортное средство V паркуется в определённом парковочном месте на основании вычисленной управляющей команды.
[0021]
В процессе дистанционного управления парковкой, когда обмен информацией, необходимой терминалу 5 управления и устройству 10 управления, выполняется с использованием двух или более каналов связи, и качество связи для одного из каналов связи низкое, связь выполняется с использованием одного или более других каналов связи (другого канала связи). В качестве дополнения, объём информации для первой информации и/или второй информации, подлежащей обмену, уменьшается, и поэтому дистанционное управление парковкой может выполняться даже если условия связи и состояние связи являются плохими, а качество связи ниже необходимого уровня. Это может предотвратить ситуацию, в которой дистанционное управление парковкой может или не может выполняться в зависимости от качества связи. В результате надежность устройства 100 управления парковкой, имеющего функцию дистанционного управления парковкой, может быть повышена.
[0022]
Кроме того, когда качество связи для одного из первого канала связи и второго канала связи является низким, связь выполняется с использованием одного или более других каналов связи. В качестве дополнения, параметры, используемые при вычислении маршрута парковки, и/или параметры, используемые в процессе вычисления управляющей команды для движения транспортного средства V по маршруту парковки, изменяются, и процесс парковки выполняется на основании другого маршрута парковки или другой управляющей команды. Посредством этой операции, дистанционное управление парковкой может выполняться даже когда условия связи и состояние связи являются плохими и качество связи ниже требуемого уровня. Это может предотвратить ситуацию, в которой дистанционное управление парковкой может или не может выполняться в зависимости от качества связи. В результате надежность устройства 100 управления парковкой, имеющего функцию дистанционного управления парковкой, может быть повышена.
[0023]
На фиг.2 показана блок–схема, иллюстрирующая процедуру управления процессом управления парковкой, выполняемым системой 1000 управления парковкой, в соответствии с одним или более вариантами осуществления настоящего изобретения. Инициирующее условие для запуска процесса управления парковкой конкретно не ограничено, и процесс управления парковкой может запускаться с помощью управления пусковым переключателем устройства 100 управления парковкой.
[0024]
Устройство 100 управления парковкой в соответствии с одним или более вариантами осуществления настоящего изобретения имеет функцию движения транспортного средства V в парковочное место автономным способом на основании операционной информации, полученной извне транспортного средства.
[0025]
На этапе 101 устройство 10 управления устройства 100 управления парковкой в соответствии с одним или более вариантами осуществления настоящего изобретения получает изображения, захваченные камерами 1a–1d, установленными на множестве участков транспортного средства V. Хотя это не ограничено конкретно, камера 1a расположена на передней решетке транспортного средства V, камера 1d расположена вблизи заднего бампера, а камеры 1b и 1c расположены в нижних частях правого и левого зеркал заднего вида. Каждая из используемых камер 1a–1d может представлять собой камеру, имеющую широкоугольный объектив с широким углом обзора. Камеры 1a–1d захватывают изображения линий границ парковочных мест вокруг транспортного средства V и объектов, имеющихся вокруг парковочных мест. Камеры 1a - 1d могут быть камерами CCD, инфракрасными камерами или другими соответствующими устройствами формирования изображений.
[0026]
На этапе 101 устройство 10 управления также получает сигналы измерения расстояния от устройств 2 измерения расстояния, которые установлены на множестве участков транспортного средства V.
Устройства 2 измерения расстояния могут быть предусмотрены в тех же положениях, что и камеры 1a–1d, или также могут быть предусмотрены в других положениях. Каждое используемое устройство 2 измерения расстояния может представлять собой радарное устройство, такое как радарное устройство миллиметрового диапазона, лазерное радарное устройство или ультразвуковое радарное устройство или устройство-сонар. Устройства 2 измерения расстояния обнаруживают присутствие или отсутствие объектов, положения объектов, размеры объектов и расстояния до объектов на основании принятых сигналов радарных устройств. К таким объектам относятся установленные объекты, пешеходы, другие транспортные средства и припаркованные транспортные средства вокруг транспортного средства V. Принимаемые сигналы используются для определения того, является ли парковочное место пустым (того, припарковано ли транспортное средство в парковочном месте). Препятствия могут быть обнаружены камерами 1a–1d с использованием технологии стереосъёмки движения.
[0027]
На этапе 102 устройство 10 управления устройства 100 управления парковкой использует функцию обработки изображений для формирования планового изображения. На основе полученного множества захваченных изображений функция обработки изображений может служить для формирования планового изображения, в котором состояние окружения, включающего в себя транспортное средство V и парковочное место для парковки транспортного средства V, наблюдается с виртуальной точки P обзора (не показана) над транспортным средством V.
[0028]
На этапе 103 устройство 10 управления обнаруживает места для парковки, в которых возможна парковка. Устройство 10 управления выполняет обнаружение краев на основании захваченных изображений с камер 1a–1d и обнаруживает места для парковки, которые определяются линиями границ, на основании разности яркости (контрастности). После обнаружения парковочных мест устройство 10 управления обнаруживает пустые парковочные места, используя данные обнаружения устройств 2 измерения расстояния. Устройство 10 управления обнаруживает среди парковочных мест доступные парковочные места. Доступные парковочные места – это парковочные места, которые пусты (т.е. где не припаркованы другие транспортные средства) и к которым можно получить маршруты для завершения парковки. Информация о доступных парковочных местах также может быть получена с информационного сервера 3. Условие, что маршрут может быть получен, означает, что может быть сформирована траектория маршрута по координатам дорожного покрытия без пересечения с препятствиями (включая припаркованные транспортные средства). На практике точный маршрут парковки для управления транспортным средством V получают после того, как задано целевое парковочное место.
[0029]
В одном или более вариантах осуществления настоящего изобретения оператор выполняет так называемый дистанционный процесс парковки, при котором оператор покидает транспортное средство V и паркует транспортное средство V снаружи. На этапе 104 оператор, который выходит из транспортного средства, вводит операционную информацию, относящуюся к процессу парковки, в терминал 5 управления. Операционная информация включает в себя по меньшей мере команду для запуска процесса парковки. Операционная информация передается на устройство 10 управления.
[0030]
В системе 1000 управления парковкой согласно одному или более вариантам осуществления настоящего изобретения устройство 10 управления и терминал 5 управления обмениваются информацией с использованием двух или более каналов связи. Каждое из устройства 21 связи устройства 100 управления парковкой и устройства 51 связи терминала 5 управления имеют две или более функций связи с использованием соответствующих каналов связи. В системе 1000 управления парковкой устройство 10 управления и терминал 5 управления обмениваются информацией, используя первый канал связи и второй канал связи. Кроме того, устройство 10 управления и терминал 5 управления могут обмениваться информацией, используя третий канал связи, отличный от первого канала связи и второго канала связи. Устройство 10 управления и терминал 5 управления обмениваются информацией, используя два канала связи: первый канал связи и второй канал связи. Устройство 10 управления и терминал 5 управления могут обмениваться информацией, используя три канала связи: первый канал связи; второй канал связи; и третий канал связи. В альтернативном варианте осуществления управляющее устройство 10 и терминал 5 управления могут иметь быть способными обмениваться информацией, используя четыре или более каналов связи. В этом примере будет описан случай использования двух каналов связи и случай использования трех каналов связи.
[0031]
Фиг. 3 иллюстрирует пути связи, используемые в одном или более вариантах осуществления настоящего изобретения. В одном или более вариантах осуществления настоящего изобретения используются первый - третий каналы связи. Будет описан каждый канал связи.
Как показано на фиг. 3, первый канал связи может использовать беспроводную связь малого радиуса действия или беспроводную связь ближнего действия. Дальность связи для первого канала связи составляет от 10 до 20 м или несколько десятков метров. Беспроводная связь малого радиуса действия включает в себя беспроводную сеть PAN: беспроводную персональную сеть, NFC: радиосвязь ближнего действия, DSRC: специализированную связь ближнего действия, определенную маломощную радиосвязь или радиосвязь низкой мощности. Беспроводная связь ближнего действия: WPAN (беспроводная персональная сеть) включает в себя Bluetooth (зарегистрированный товарный знак), UWB: ультраширокополосную связь, или ZigBee (зарегистрированный товарный знак). В этой системе в качестве первого канала связи используется Bluetooth (зарегистрированный товарный знак).
[0032]
Второй канал связи использует беспроводную LAN: беспроводную локальную сеть или беспроводную MAN: беспроводную городскую сеть. Дальность связи для второго канала связи составляет около 100 м или менее или 100 км или менее. В этой системе в качестве второго канала связи используется Wi–Fi (беспроводная локальная сеть).
[0033]
Третий канал связи может использовать глобальную беспроводную сеть или беспроводную WAN: беспроводную глобальную сеть. Беспроводная WAN – это сеть, в которой удаленные сети соединены одной или более линиями связи. Это беспроводная сеть, которая может связываться с сетью Интернет и т.п. через базовую станцию, такую как сеть мобильной телефонной связи. В этой системе в качестве третьего канала связи используется сеть мобильной телефонной связи.
[0034]
Хотя это и не ограничено конкретно, первая информация, включающая в себя операционную информацию, является информацией высокой важности, которая передает намерение оператора устройству 100 управления парковкой, поэтому предпочтительно использовать канал связи с относительно высокой степенью защиты. Первая информация, включающая в себя операционную информацию, является информацией, которая должна незамедлительно (без задержки) передавать намерение оператора устройству 100 управления парковкой, поэтому предпочтительно использовать канал связи с относительно высокой скоростью передачи данных.
[0035]
Как показано на фиг. 3, связь осуществляется между терминалом 5 управления, включающим в себя дисплей 53, и бортовыми камерами 1a–1d и устройствами 2 измерения расстояния, используя любой из первого-третьего каналов передачи данных.
[0036]
В одном или более вариантах осуществления настоящего изобретения первая информация, включающая в себя операционную информацию, и вторая информация, включающая в себя информацию представления в отношении управления парковкой, которая должна быть представлена оператору, передаются и принимаются через различные каналы связи. В этом примере первая информация передается по первому каналу связи, а вторая информация передается и принимается по второму каналу связи. Первая информация и вторая информация идентифицируются на основании соответствующих идентификаторов, назначенных первой информации и второй информации. Каждое из устройства 51 связи терминала 5 управления и устройства 21 связи устройства 100 управления парковкой имеют протоколы связи для первого-третьего каналов связи, которые могут использоваться, и программное и аппаратное обеспечение для обработки связи. Каждое из устройства 51 связи и устройства 21 связи идентифицирует первую информацию или вторую информацию на основании идентификатора и передает и принимает информацию, используя каналы связи, связанные с первой информацией и второй информацией.
[0037]
На этапе 105 устройство 10 управления и/или терминал 5 управления выполняют процесс переключения каналов связи в соответствии с качеством связи. Качество связи количественно оценивается в соответствии со значением оценки. В качестве значения оценки качества связи может использоваться одно или более из отношения S/N, задержки и пропускной способности связи и времени прерывания связи. Отношение S/N относится к отношению сигнала к шуму. Отношение S/N включает в себя отношение сигнал–шум или отношение сигнала к шуму. Чем выше отношение S/N, тем выше оценка качества связи, а чем ниже отношение S/N, тем ниже оценка качества связи. Задержка относится к времени задержки связи с момента выдачи запроса на передачу до момента фактического приёма данных. Чем дольше (большее значение) задержка, тем ниже оценка качества связи, а чем короче (меньшее значение) задержка, тем выше оценка качества связи. Пропускная способность относится к значению, которое представляет объём передачи (объем информации) за единицу времени для линии связи, которая будет использоваться. Чем выше пропускная способность, тем выше оценка качества связи, а чем ниже пропускная способность, тем ниже оценка качества связи. Время прерывания связи относится ко времени от прерывания связи до её восстановления. Чем короче время прерывания связи, тем выше оценка качества связи, а чем дольше время прерывания связи, тем ниже оценка качества связи.
[0038]
Пороговые величины оценки (первая пороговая величина оценки, вторая пороговая величина оценки и третья пороговая величина оценки) могут быть предварительно установлены. Пороговые величины оценки могут быть соответствующим образом установлены в соответствии с важностью/срочностью информации в процессе парковки. Например, операционная информация очень важна при выполнении процесса парковки, и скорость отклика между терминалом 5 управления и устройством 10 управления должна быть быстрой. Таким образом, первая пороговая величина оценки устанавливается на высоком уровне. Посредством установки высокой первой пороговой величины оценки, когда качество связи для первого канала связи является низким, процесс переключения на другой канал связи выполняется немедленно, и может быть обеспечен плавный обмен операционной информацией. Разумеется, пороговые величины оценки могут быть установлены с учетом уникального отношения S/N, задержки, пропускной способности и времени прерывания связи для каждого канала связи. На практике пороговые величины оценки могут быть установлены экспериментальным путём при фактическом выполнении процесса парковки.
[0039]
Если первое значение оценки, относящееся к качеству связи для первого канала связи, меньше первой пороговой величины, устройство 10 управления и/или терминал 5 управления обмениваются по меньшей мере частью первой информации через один или более каналов связи, отличных от первого канала связи, в то время как, если второе значение оценки, относящееся к качеству связи для второго канала связи, меньше второй пороговой величины, устройство 10 управления и/или терминал 5 управления обмениваются по меньшей мере частью второй информации через один или более каналов связи, отличных от второго канала связи. То есть, если качество связи ниже заданной величины, связь продолжается посредством назначения информации, которая должна быть передана и принята, в другой канал связи. Вся первая информация может быть назначена другому каналу связи, или часть первой информации может быть назначена другому каналу связи. Другим каналом связи для использования может быть любой из первого канала связи и второго канала связи, которые используются в качестве каналов по умолчанию, или также может быть третьим каналом связи, отличным от первого и второго каналов связи. Операционная информация из первой информации включает в себя управляющие команды (команду начала парковки, команду задания целевого парковочного места, команду остановки и время ввода), которые вводит оператор, запрос подтверждения управляющей команды, запрос необходимой информации для следующего действия и т.п. Первая информация, включающая в себя операционную информацию, может быть разделена таким образом, чтобы только часть первой информации передавалась и принималась по первому каналу связи, а оставшаяся первая информация передавалась и принималась по другому каналу связи. Аналогичным образом, информация представления из второй информации включает в себя информацию обнаружения от различных датчиков, таких как встроенные устройства 2 измерения расстояния, изображения, снятые камерами 1a–1d, меню выбора для выбора режима парковки, которое сокращается на основании информации обнаружения и/или захваченных изображений, и т.п. Вторая информация, включающая в себя информацию представления, может быть разделена таким образом, чтобы только часть второй информации передавалась и принималась по второму каналу связи, а оставшаяся вторая информация передавалась и принималась по другому каналу связи. Таким образом, путем разделения первой информации и/или второй информации и передачи и приема каждой разделенной части информации по одному или более различным каналам связи, даже когда качество связи становится плохим, происходит обмен информацией между терминалом 5 управления и устройством 10 управления и, следовательно, может быть продолжено выполнение процесса парковки.
[0040]
На каждой из фиг. 4А и фиг. 4В показана схема, иллюстрирующая форму переключения каналов связи. РИС. 4А иллюстрирует форму процесса переключения каналов связи при использовании двух каналов связи: первого и второго каналов связи.
Как показано на фиг. 4A, в принципе, операционная информация (первая информация), которая вводится в терминал 5 управления от оператора за пределами транспортного средства, передается и принимается между терминалом 5 управления и бортовым устройством по первому каналу связи, в то время как изображения, захваченные камерами 1a–1d бортового устройства (вторая информация), информация обнаружения от устройств 2 измерения расстояния (вторая информация) и информация определения, выполняемого устройством 10 управления (вторая информация), передаются и принимаются между бортовым устройством и терминалом 5 управления через второй канал связи. Информация обнаружения от устройств 2 измерения расстояния включает в себя информацию о наличии или отсутствии препятствия и положении нахождения препятствия. Когда качество связи для первого канала связи является низким, устройство 10 управления и терминал 5 управления передают и принимают операционную информацию (первую информацию), используя второй канал связи, отличный от первого канала связи. Когда качество связи для второго канала связи является низким, устройство 10 управления и терминал 5 управления передают и принимают информацию представления (вторую информацию), используя первый канал связи, отличный от второго канала связи.
[0041]
Фиг. 4B иллюстрирует форму процесса переключения каналов связи при использовании любого одного или более из трех каналов связи: первого - третьего каналов связи. Также, если используются три канала связи, в принципе, операционная информация (первая информация), которая вводится в терминал 5 управления оператором, расположенным за пределами транспортного средства, передается и принимается между терминалом 5 управления и бортовым устройством через первый канал связи, в то время как изображения, захваченные камерами 1a–1d бортового устройства (вторая информация), информация обнаружения от устройств 2 измерения расстояния (вторая информация) и информация определения, выполняемого устройством 10 управления (вторая информация), передаются и принимаются между бортовым устройством и терминалом 5 управления через второй канал связи. Информация обнаружения от устройств 2 измерения расстояния включает в себя информацию о наличии или отсутствии препятствия и положении нахождения препятствия. Когда качество связи для первого канала связи является низким, устройство 10 управления и терминал 5 управления передают и принимают операционную информацию (первую информацию), используя второй и/или третий каналы связи, которые отличны от первого канала связи. Когда качество связи для второго канала связи является низким, устройство 10 управления и терминал 5 управления передают и принимают информацию представления (вторую информацию) с использованием первого и/или третьего каналов связи, которые отличны от второго канала связи.
В этом случае часть первой информации и/или часть второй информации могут передаваться и приниматься через один или более других каналов связи. Информация формирования изображений из второй информации может передаваться и приниматься по второму каналу связи, тогда как информация о расстоянии из второй информации может передаваться и приниматься по третьему каналу связи.
[0042]
Фиг. 5 иллюстрирует дополнительную процедуру процесса этапа 105. На этапе 130 выполняется определение того, является ли значение оценки качества связи для первого канала связи меньшим, чем первая пороговая величина. За отрицательным определением (определением, что качество связи хорошее) следует этап 107 по фиг. 2, на котором первая информация, включающая в себя операционную информацию, передается и принимается с использованием первого канала связи. За успешной передачей и приемом первой информации следует этап 135, на котором выполняется определение того, является ли качество связи для второго канала связи меньшим, чем вторая пороговая величина. За отрицательным определением (определением, что качество связи хорошее) следует этап 108 по фиг. 2, в котором вторая информация, включающая в себя информацию представления, передается и принимается с использованием второго канала связи. Когда на этапе 130 значение оценки качества связи для первого канала связи меньше первой пороговой величины, процесс переходит к этапу 131, на котором выполняется определение относительно того, является ли значение оценки качества связи для второго канала связи меньшим, чем вторая пороговая величина. Когда значение оценки для второго канала связи не меньше второй пороговой величины, процесс переходит к этапу 132, на котором первая информация передается и принимается с использованием второго канала связи. При этом, когда значение оценки качества связи для третьего канала связи не меньше третьей пороговой величины, первая информация может передаваться и приниматься с использованием третьего канала связи. В случае, когда используются только два канала связи, если на этапе 131 качество связи является низким как в первом, так и во втором каналах связи, процесс заканчивается.
[0043]
Если на этапе 131 или 135 значение оценки для второго канала связи меньше второй пороговой величины, процесс переходит к этапу 133. Качество связи меньше заданных пороговых величин для первого канала связи и второго канала связи; таким образом, в этом случае подтверждается, что доступен третий канал связи со значением оценки, не меньшим, чем третья пороговая величина, и первая и вторая информация передаются и принимаются с использованием третьего канала связи. Если на этапе 133 выполняется отрицательное определение, процесс заканчивается.
[0044]
Один или более других каналов связи, используемых, когда качество связи для первого канала связи и/или для второго канала связи является низким, могут представлять собой не только первый канал связи и/или второй канал связи, которые установлены в качестве каналов по умолчанию, но также и третий канал связи, отличный от первого канала связи и второго канала связи. Таким образом, , когда качество связи для канала связи является низким, используются один или более из других каналов связи, и таким образом процесс парковки может продолжаться даже если качество связи становится низким.
[0045]
На этапе 106 по фиг. 2 устройство 10 управления и/или терминал 5 управления уменьшают объем информации для первой информации, включающей в себя операционную информацию, и второй информации, включающей в себя информацию представления, в соответствии с качеством связи.
Когда первое значение оценки, относящееся к качеству связи для первого канала связи, меньше первой пороговой величины, устройство 10 управления и/или терминал 5 управления уменьшают объем информации для операционной информации и/или информации представления в дополнение к выполнению процесса обмена по меньшей мере частью первой информации через один или более каналов связи, отличных от первого канала связи. Когда второе значение оценки, относящееся к качеству связи для второго канала связи, меньше второй пороговой величины, устройство 10 управления и/или терминал 5 управления уменьшают объем информации для рабочей информации и/или информации представления в дополнение к выполнению процесса обмена по меньшей мере частью второй информации через один или более каналов связи, отличных от второго канала связи.
[0046]
Фиг. 6 иллюстрирует дополнительную процедуру этапа 106 по фиг. 2. Если на этапе 140 первое значение оценки, относящееся к качеству связи для первого канала связи, меньше первой пороговой величины, операционная информация ограничивается на этапе 141. Затем процесс переходит к этапу 107 по фиг. 2, на котором операционная информация с уменьшенным объемом информации передается по первому каналу связи. Устройство 10 управления и/или терминал 5 управления сокращают типы вводимой информации для операционной информации, тем самым сокращая информацию, которую может вводить оператор, так что обмен информацией может быть обеспечен даже после переключения каналов связи. Это позволяет продолжить процесс парковки, даже когда качество связи становится низким.
[0047]
Фиг. 7А иллюстрирует информацию, отображаемую на дисплее 53 при точном регулировании целевого положения парковки в процессе парковки. Стрелки на чертеже представляют кнопки для точного регулирования целевого положения парковки, когда транспортное средство V перемещается в целевое парковочное место F2, указанное целевыми парковочными рамками F3. Прикосновение к каждой стрелке позволяет перемещать целевые парковочные рамки F3 и целевое парковочное место F2 в направлении стрелки. Как показано на фиг. 7B, устройство 10 управления и/или терминал 5 управления могут исключать кнопки со стрелками для точной регулировки положения, показанные на фиг. 7А, в качестве формы процесса сокращения типов вводимой информации для операционной информации. Точное регулирование положения парковки требует частого обмена информацией. С точки зрения уменьшения объёма информации, ограничивается ввод и вывод первой информации и второй информации, относящейся к точному регулированию положения парковки, таким образом позволяя продолжать процесс управления парковкой, даже если точная регулировка положения парковки не может быть выполнена.
[0048]
Устройство 10 управления и/или терминал 5 управления могут ограничивать вводимый режим парковки для операционной информации режимом восстановления (режимом спасения) в направлении от целевого положения парковки. Отображение кнопок для приёма ввода выбора режима парковки, отличного от режима восстановления, исключается. Когда отображение режима восстановления (режима спасения) выбрано и выполняется управление парковкой в режиме восстановления, транспортное средство V перемещается в направлении от целевого положения парковки. Например, транспортное средство V может быть перемещено в исходное положение (положение, в котором начинался процесс парковки). В этом случае кнопки со стрелками для точного регулирования положения, показанные на фиг. 7A, могут быть исключены, и может отображаться только кнопка для выбора режима восстановления, как показано на фиг. 7С. Это позволяет немедленно активировать режим спасения, когда качество связи является низким, и транспортное средство V можно переместить в исходное положение. Процесс парковки может быть продолжен даже при плохих условиях связи.
[0049]
Фиг. 8 иллюстрирует подпрограмму этапа 106 по фиг. 2. Когда на этапе 150 первое значение оценки, относящееся к качеству связи для первого канала связи, меньше первой пороговой величины, на этапе 151 ограничивается объем информации для информации представления. Затем процесс переходит к этапу 108 по фиг. 2, в котором информация представления с уменьшенным объемом информации передается по второму каналу связи.
[0050]
Фиг. 9A является примером информации представления, в которой в процессе парковки на дисплее 53 отображаются изображения, снятые камерами 1a–1d. Информация представления, показанная на чертеже, включает в себя захваченное изображение R1 для передней области транспортного средства V, захваченное изображение R2 для области с правой стороны, захваченное изображение R3 для задней области, захваченное изображение R4 для области с левой стороны и изображение R0 транспортного средства V. Оператор может наблюдать за ситуацией вокруг транспортного средства V на основании захваченных изображений. Устройство 10 управления и/или терминал 5 управления представляют информацию представления с уменьшенным объемом информации. В частности, может быть представлена новая вторая информация представления, которая создается путем уменьшения количества пикселей или разрешения захваченных изображений в информации первого представления, создаваемой с количеством пикселей или разрешением согласно исходному состоянию. В качестве дополнения или альтернативы может быть представлена новая вторая информация представления, в которой количество, размер, количество цветов и т.п. для захваченных изображений из первой информации представления уменьшены. В качестве дополнения или альтернативы, может быть представлена новая вторая информация представления, которая создается путем сокращения цикла захвата изображений для первой информации представления, создаваемой с циклом согласно исходному состоянию. Благодаря уменьшению объема информации изображений, даже если качество канала связи становится низким, может осуществляться обмен информацией для продолжения процесса парковки.
[0051]
Как показано на фиг. 9B, устройство 10 управления и/или терминал 5 управления могут заменять информацию изображений, такую как захваченные изображения, показанные на фиг. 9А, схематичными представлениями в качестве формы уменьшения объема информации для информации представления, показанной на фиг. 9А. Благодаря замене информации изображений одним или более схематичными представлениями для уменьшения объема информации для информации представления, даже когда качество канала связи становится низким, может осуществляться обмен информацией для продолжения процесса парковки.
[0052]
Устройство 10 управления и/или терминал 5 управления могут уменьшать количество типов содержимого, включенных в информацию представления, в качестве формы уменьшения объема информации для информации представления, показанной на фиг. 9А. Более конкретно, из захваченных изображений со всех сторон транспортного средства V, показанных на фиг. 9А, в качестве информации представления может отображаться захваченное изображение лишь частичной области. В этом случае может отображаться информация изображений для области, в которой имеется препятствие. Согласно захваченным изображениям в информации представления, показанной на фиг. 9А, препятствие имеется только в задней области. Устройство 10 управления и/или терминал 5 управления могут уменьшать количество типов содержимого, включенных в информацию представления, показанную на фиг. 9А, и использовать только информацию изображений для области, в которой имеется препятствие, как показано на фиг. 9C, в качестве информации представления. Благодаря уменьшению количества типов содержимого, включенных в информацию представления, даже когда качество канала связи становится плохим, может осуществляться обмен информацией для продолжения процесса парковки. Как показано на чертеже, информация изображений может быть заменена схематичным видом.
[0053]
Информация представления может быть информацией о препятствии, обнаруженном устройствами 2 измерения расстояния. Фиг. 9C иллюстрирует информацию о пешеходе, обнаруженном устройствами 2 измерения расстояния. Вместо использования всей задней области в качестве информации представления может использоваться только часть, окруженная прямоугольной рамкой, в которой виден пешеход.
[0054]
Операционная информация включает в себя команду для начала процесса парковки и информацию о назначении целевого места парковки, в которое требуется припарковать транспортное средство V. Целевое место парковки вводится через терминал 5 управления. Целевое место парковки – это место парковки, в которое автономно, без действий водителя, паркуется транспортное средство V путем выполнения движения, такого как движение вперед, движение назад и поворот. Таким образом, целевое место парковки представлено целевым положением парковки при автономном движении. Например, когда дисплей 53 является дисплеем типа сенсорной панели, оператор может выбрать одно целевое место парковки, касаясь части дисплея, соответствующей желаемому месту парковки. Доступные места парковки могут отображаться таким образом, что они накладываются на верхнее изображение на основании захваченных изображений. Терминал 5 управления передает операционную информацию, которая вводится оператором, в устройство 10 управления. При приёме операционной информации устройство 10 управления передает сигнал подтверждения на терминал 5 управления. Терминал 5 управления принимает сигнал подтверждения.
[0055]
Терминал 5 управления и устройство 10 управления обмениваются первой информацией и второй информацией друг с другом и получают операционную информацию, включающую в себя информацию для указания целевого места парковки. Идентификационная информация выбранного целевого места парковки передается в устройство 100 управления парковкой и вводится в устройство 10 управления.
[0056]
Обращаясь вновь к фиг. 2, на этапе 107 устройство 10 управления и терминал 5 управления передают и принимают первую информацию, включающую в себя операционную информацию. На этапе 108 устройство 10 управления и терминал 5 управления передают и принимают вторую информацию, включающую в себя информацию представления. В этом примере, в принципе, обмен первой информацией, включающей в себя операционную информацию, осуществляется через первый канал связи, в то время как обмен второй информацией, включающей в себя информацию представления, относящуюся к управлению парковкой, которая должна быть представлена на терминале 5 управления, осуществляется через второй канал связи. Как описано выше, обмен информацией осуществляется по каналу связи, который выбран в соответствии с качеством связи на этапе 105, и осуществляется обмен первой информацией и второй информацией, которые ограничены в соответствии с качеством связи на этапе 106.
[0057]
На этапе 109 обнаруживается препятствие в окружении транспортного средства V. В частности, обнаруживается препятствие, которое имеется вблизи маршрута парковки от текущего положения транспортного средства V до целевого места парковки.
[0058]
На этапе 110 устройство 10 управления и/или терминал 5 управления вычисляют параметры, используемые в процессе вычисления маршрута парковки и/или управляющей команды, в соответствии с качеством связи.
Когда первое значение оценки, относящееся к качеству связи для первого канала связи, меньше первой пороговой величины, устройство 10 управления и/или терминал 5 управления изменяют маршрут парковки или управляющую команду для движения по маршруту парковки в дополнение к выполнению процесса обмена по меньшей мере частью первой информации через один или более каналов связи, отличных от первого канала связи. Когда второе значение оценки, относящееся к качеству связи для второго канала связи, меньше второй пороговой величины, устройство 10 управления и/или терминал 5 управления изменяют маршрут парковки или управляющую команду для движения по маршруту парковки в дополнение к выполнению процесса обмена по меньшей мере частью второй информации через один или более каналов связи, отличных от второго канала связи.
[0059]
Устройство 10 управления устанавливает параметры в соответствии с качеством связи. Параметры включают в себя параметры при расчете маршрута парковки и параметры в управляющей команде для движения транспортного средства V по маршруту парковки.
[0060]
Параметры при расчете маршрута парковки включают в себя расстояние запаса между препятствием и транспортным средством V или маршрут парковки, который является траекторией, состоящей из положений движения транспортного средства V. Устройство 10 управления изменяет первое расстояние запаса между транспортным средством V и препятствие, обнаруженное в окружении транспортного средства V на маршруте парковки до второго расстояния запаса, превышающего первое расстояние запаса. В общем, маршрут парковки для движения транспортного средства V задается в положениях, в которых поддерживается заданное расстояние запаса, чтобы избежать сближения и/или контакта транспортного средства с окружающими препятствиями. В процессе парковки с дистанционным управлением операция парковки легче, когда транспортное средство V движется на определенном расстоянии от препятствия, чем когда транспортное средство V движется в непосредственной близости от препятствия (уровень сложности в первом случае ниже). В состоянии низкого качества связи расстояние запаса между транспортным средством V1 и препятствием изменяется на большее расстояние, чтобы снизить уровень сложности операции, чтобы оператор мог легко управлять транспортным средством V. Это позволяет оператору соответствующим образом выполнять управление для процесса парковки даже в состоянии низкого качества связи. В одном или более вариантах осуществления настоящего изобретения, когда качество связи становится плохим, маршрут парковки вычисляется путем применения второго расстояния запаса, большего, чем первое расстояние запаса, применяемое, когда качество связи не ниже ожидаемого значения. Транспортное средство V, движущееся по маршруту парковки, к которому применяется второе расстояние, движется в положении, более удаленном от препятствия. Посредством этой операции процесс парковки может выполняться даже в состоянии низкого качества связи, в то время как оператор чувствует себя в безопасности. Процесс установки параметров для маршрута парковки и процесс вычисления маршрута парковки могут выполняться устройством 10 управления или также могут выполняться терминалом 5 управления.
[0061]
Параметры в управляющей команде для движения транспортного средства V по маршруту парковки включают в себя любое одно или более из скорости, верхнего предела скорости, ускорения, замедления, скорости рыскания, поперечного ускорения, величины рулевого управления и скорости рулевого управления в отношении движения транспортного средства V. Посредством вычисления информации управления с использованием параметров в соответствии с уровнем качества связи транспортное средство V может парковаться с адаптацией содержимого управления к качеству связи даже когда качество связи является низким. Каждый параметр устанавливается для каждого уровня значения оценки качества связи. Первый параметр устанавливается для уровня 1 значения оценки (нормальный), а второй параметр устанавливается для уровня 2 значения оценки (относительно хуже уровня 1 значения оценки). Количество ступеней для уровней значения оценки не ограничено двумя.
[0062]
Устройство 10 управления и/или терминал 5 управления изменяют первую верхнюю предельную скорость транспортного средства V в команде управления на вторую верхнюю предельную скорость ниже первой верхней предельной скорости. В общем, когда транспортное средство V движется по маршруту парковки, для скорости движения транспортного средства V устанавливается верхний предел. В одном или более вариантах осуществления настоящего изобретения, когда качество связи становится плохим, вычисляется управляющая команда с применением второй верхней предельной скорости ниже первой верхней предельной скорости, применяемой, когда качество связи не меньше ожидаемого значения. Когда к управляющей команде применяется вторая верхняя предельная скорость, транспортное средство V движется по маршруту парковки относительно медленно. В процессе парковки с дистанционным управлением управление легче, когда транспортное средство V движется с низкой скоростью, чем когда транспортное средство V движется с высокой скоростью. В состоянии низкого качества связи верхняя предельная скорость изменяется на низкую скорость, чтобы снизить уровень сложности управления, чтобы оператор мог легко управлять транспортным средством V. Это позволяет оператору надлежащим образом выполнять управление для процесса парковки даже в состоянии низкого качества связи. Кроме того, транспортное средство V как цель управления движется медленнее, чем обычно, и поэтому оператор может чувствовать себя в безопасности. Процесс установки параметров в управляющей команде и процесс вычисления маршрута парковки могут быть выполнены устройством 10 управления или также могут быть выполнены терминалом 5 управления.
[0063]
Устройство 10 управления и/или терминал 5 управления изменяют первое верхнее предельное ускорение транспортного средства V в управляющей команде на второе верхнее предельное ускорение ниже первого верхнего предельного ускорения. В общем, когда транспортное средство V движется по маршруту парковки, при движении транспортного средства V устанавливается верхний предел для ускорения. Ускорение в этом примере включает в себя параметры движения, которые влияют на поведение транспортного средства V, такие как ускорение/замедление, производная по времени ускорения и производная по времени ускорения/замедления. В одном или более вариантах осуществления настоящего изобретения, когда качество связи становится плохим, управляющая команда вычисляется с применением второго верхнего предельного ускорения ниже первого верхнего предельного ускорения, применяемого, когда качество связи не ниже ожидаемого значения. Когда к управляющей команде применяется второе верхнее предельное ускорение, транспортное средство V движется по маршруту парковки по существу с постоянной скоростью (скорость с небольшим изменением). В процессе парковки с дистанционным управлением управление легче, когда транспортное средство V движется по существу с постоянной скоростью, чем когда транспортное средство V движется со скоростью с большим изменением. В состоянии низкого качества связи верхний предел ускорения изменяется на низкое ускорение, чтобы снизить уровень сложности управления, чтобы оператор мог легко управлять транспортным средством V. Это позволяет оператору надлежащим образом выполнять управление для процесса парковки даже в состоянии низкого качества связи. Кроме того, транспортное средство V как цель управления движется по существу с постоянной скоростью (в состоянии, в котором изменение скорости мало), чем обычно, и поэтому оператор может чувствовать себя в безопасности. Процесс установки параметров в управляющей команде и процесс вычисления маршрута парковки могут быть выполнены устройством 10 управления или также могут быть выполнены терминалом 5 управления.
[0064]
Фиг. 10 иллюстрирует дополнительную процедуру процесса изменения параметров, относящихся к маршруту парковки и/или управляющей команде. На этапе 160 по фиг. 10, когда значение оценки качества связи для первого канала связи меньше первой пороговой величины или значение оценки качества связи для второго канала связи меньше второй пороговой величины, процесс, выполняемый устройством 10 управления, продолжается на этапе 161. На этапе 161 устройство 10 управления изменяет параметры, относящиеся к маршруту парковки и/или управляющей команде. На Фиг. 11 приведён перечень содержимого настроек параметров для маршрута парковки и управляющей команды для движения транспортного средства V по маршруту парковки.
[0065]
Как указано на фиг. 11, в процессе вычисления маршрута парковки, если определено, что качество связи низкое, устройство 10 управления изменяет расстояние запаса между препятствием и транспортным средством V на большее расстояние. В процессе вычисления управляющей команды, если определено, что качество связи низкое, устройство управления изменяет верхнюю предельную скорость или верхнее предельное ускорение транспортного средства V на меньшее значение. Когда параметры включают в себя скорость рыскания, поперечное ускорение, величину рулевого управления или скорость рулевого управления транспортного средства V, предпочтительно вычислять скорость, ускорение, замедление, скорость верхнего предела или ускорение верхнего предела таким образом, чтобы каждый параметр был меньше заданного значения. После установки параметров процесс переходит к этапу 111 по фиг. 2.
[0066]
В процессе выбора меню парковки в обычном случае представляются два или более меню , такие как въезд на целевое место парковки или выезд с места парковки, но в качестве выбираемого меню отображается только режим спасения. Устройство 10 управления не принимает команды выполнения для других меню, кроме режима спасения. Это позволяет выполнять процесс парковки в виде процесса парковки с дистанционным управлением, даже когда качество связи низкое.
[0067]
Обращаясь вновь к фиг. 2, будут описаны процессы после этапа 111.
На этапе 111 устройство 10 управления вычисляет маршрут парковки, используя параметры, которые установлены в соответствии с качеством связи, и формирует управляющую команду для движения транспортного средства V по вычисленному маршруту парковки.
[0068]
Когда на этапе 112 вводится команда выполнения для процесса управления парковкой, процесс переходит к этапу 113, на котором устройство 100 управления парковкой в соответствии с одним или более вариантами осуществления настоящего изобретения функционирует для выполнения процесса управления парковкой.
Устройство 100 управления парковкой в соответствии с одним или более вариантами осуществления настоящего изобретения функционирует для управления работой системы 40 привода через контроллер 70 транспортного средства в соответствии с управляющей информацией таким образом, чтобы транспортное средство V двигалось по маршруту парковки.
[0069]
Устройство 100 управления парковкой функционирует для вычисления командных сигналов для системы 40 привода транспортного средства V, такого как двигатель EPS, с одновременной передачей обратной связи в отношении выходного значения датчика 50 угла поворота рулевого колеса таким образом, чтобы траектория движения транспортного средства V совпадала с вычисленным маршрутом парковки, и передает командные сигналы в систему 40 привода или в контроллер 70 транспортного средства, который управляет системой 40 привода.
[0070]
Устройство 100 управления парковкой в соответствии с одним или более вариантами осуществления настоящего изобретения включает в себя блок управления парковкой. Блок управления парковкой получает информацию о диапазоне переключения передач от блока управления AT/CVT, информацию о скорости вращения колес от блока управления ABS, информацию об угле поворота рулевого колеса от блока управления углом поворота рулевого колеса, информацию об оборотах двигателя от ECM и другую необходимую информацию. На основании этого блок управления парковкой вычисляет и выводит информацию о командах автономного управления на блок управления EPS, информацию о командах, такую как предупреждение для блока управления счетчиком, и т.п. Устройство 10 управления получает информационные элементы, получаемые посредством датчика 50 угла поворота рулевого колеса транспортного средства V и датчика 60 скорости транспортного средства и других датчиков транспортного средства V, через контроллер 70 транспортного средства.
[0071]
Система 40 привода в соответствии с одним или более вариантами осуществления настоящего изобретения управляет транспортным средством V для движения (перемещения) из текущего положения в целевое место Mo парковки путем управления на основании сигналов управляющей команды, полученных от устройства 100 управления парковкой. Устройство рулевого управления в соответствии с одним или более вариантами осуществления настоящего изобретения представляет собой приводной механизм, который перемещает транспортное средство V в направлениях вправо и влево. Двигатель EPS, включенный в систему 40 привода, приводит в действие механизм рулевого управления с усилителем рулевого управления устройства рулевого управления на основании сигналов управляющих команд, полученных от устройства 100 управления парковкой, для управления величиной рулевого управления, и управляет работой при движении транспортного средства V до целевого места парковки. Содержимое управления и схема работы для парковки транспортного средства V не ограничены конкретно, и может быть соответствующим образом применена любая схема, известная на момент подачи настоящей заявки.
[0072]
Когда устройство 100 управления парковкой в соответствии с одним или более вариантами осуществления настоящего изобретения функционирует для управления транспортным средством V для движения по маршруту парковки, вычисленному на основании текущего положения транспортного средства V и положения целевого места парковки, управление акселератором и тормозом осуществляется автономно на основании указанной скорости управления транспортным средством (заданной скорости транспортного средства), и управление работой устройства рулевого управления также осуществляется автономно в соответствии со скоростью транспортного средства. То есть во время управления парковкой в соответствии с одним или более вариантами осуществления настоящего изобретения операция рулевого управления и операция ускорения/торможения выполняются автономно. Устройство 100 управления парковкой в соответствии с одним или более вариантами осуществления настоящего изобретения также применимо к ручной парковке, в которой водитель выполняет управление акселератором, тормозом и рулевым управлением. В качестве дополнения или альтернативы, устройство 100 управления парковкой в соответствии с одним или более вариантами осуществления настоящего изобретения функционирует для выполнения процесса парковки с дистанционным управлением, в котором транспортное средство V паркуется без водителя посредством передачи извне команды установки целевого места парковки, команды начала процесса парковки, команды приостановки/отмены парковки и т.п. для транспортного средства V.
[0073]
На этапе 114 после начала процесса парковки с заданной цикличностью обнаруживается значение оценки качества связи. На этапе 115 устройство 10 управления определяет, изменилось ли значение оценки качества связи. В качестве дополнения или альтернативы, может быть выполнено определение того, находится ли качество связи ниже пороговой величины. Если качество связи не изменяется, процесс переходит к этапу 117.
[0074]
Если определено, что качество связи ниже пороговой величины, устройство 10 управления повторно вычисляет параметры для вычисления маршрута парковки и маршрут парковки, используя эти параметры. Устройство 10 управления повторно вычисляет параметры для вычисления управляющей команды и управляющую команду, используя эти параметры. Эта схема аналогична описанному выше содержимому, поэтому содержимое описания учтено здесь. На этапе 117 устройство 10 управления отслеживает качество связи до тех пор, пока транспортное средство V не достигнет положения поворота для парковки. Когда транспортное средство V достигает положения поворота для парковки, на этапе 118 выполняется переключение передач, включенное в управляющую команду. За этапом 118 следует этап 119, на котором выполняется управляющая команда для завершения управления парковкой.
[0075]
Способ управления парковкой в соответствии с одним или более вариантами осуществления настоящего изобретения используется в устройстве управления парковкой, как указано выше, и поэтому демонстрирует следующие эффекты. Устройство 100 управления парковкой в соответствии с одним или более вариантами осуществления настоящего изобретения выполнено и функционирует, как указано выше, и, следовательно, демонстрирует следующие эффекты.
[0076]
(1) В способе управления парковкой в соответствии с одним или более вариантами осуществления настоящего изобретения доступны по меньшей мере два канала связи. В процессе дистанционного управления парковкой обмен необходимой информацией между терминалом 5 управления и устройством 10 управления выполняется с использованием двух или более каналов связи, причём первая информация передается и принимается по первому каналу связи, а вторая информация передается и принимается по второму каналу связи. Когда значение оценки, относящееся к качеству связи для канала связи, меньше заданной пороговой величины, передача и прием выполняются с использованием одного или более других каналов связи, и объем информации первой информации и/или второй информации уменьшается.
Таким образом, когда качество связи для одного из каналов связи низкое, связь выполняется с использованием одного или более других каналов связи, и в дополнение к этому объём информации для первой информации и/или второй информации, подлежащих обмену, уменьшается; следовательно, даже когда условия связи и состояние связи являются плохими, а качество связи ниже требуемого уровня, может выполняться (осуществляться) дистанционное управление парковкой.
Дистанционное управление парковкой может быть исключено из–за низкого качества связи. В результате надежность функции дистанционного управления парковкой может быть повышена.
[0077]
(2) В способе управления парковкой в соответствии с одним или более вариантами осуществления настоящего изобретения устройство 10 управления и/или терминал 5 управления сокращают типы вводимой информации для операционной информации, тем самым сокращая информацию, которую может вводить оператор, так что обмен информацией может быть обеспечен даже после переключения каналов связи. Кнопки со стрелками для точного регулирования положения, показанные на фиг. 7А, могут быть исключены. Посредством вышеупомянутой операции процесс парковки может быть продолжен, даже когда качество связи становится плохим.
[0078]
(3) В способе управления парковкой в соответствии с одним или более вариантами осуществления настоящего изобретения устройство 10 управления и/или терминал 5 управления могут ограничивать режим парковки с возможностью ввода операционной информации для режима восстановления (режима спасения) в направлении от места парковки. Когда выполняется режим восстановления, транспортное средство V перемещается в направлении от целевого положения парковки. Например, транспортное средство V может быть перемещено в исходное положение (положение, в котором начался процесс парковки). Кнопки со стрелками для точного регулирования положения могут быть исключены, и может отображаться только кнопка для выбора режима спасения. Это позволяет немедленно активировать режим спасения, когда качество связи низкое, и транспортное средство V можно переместить в исходное положение.
[0079]
(4) В способе управления парковкой в соответствии с одним или более вариантами осуществления настоящего изобретения за счет уменьшения объема информации для информации изображений, даже когда качество канала связи становится плохим, может осуществляться обмен информацией для продолжения процесса парковки.
[0080]
(5) В способе управления парковкой в соответствии с одним или более вариантами осуществления настоящего изобретения, путем замены информации изображений одним или более схематичными представлениями для уменьшения объема информации для информации представления, даже когда качество канала связи становится плохим, может осуществляться обмен информацией для продолжения процесса парковки.
[0081]
(6) В способе управления парковкой в соответствии с одним или более вариантами осуществления настоящего изобретения за счет сокращения количества типов содержимого, включаемого в информацию представления, даже когда качество канала связи становится плохим, может осуществляться обмен информацией для продолжения процесса парковки.
[0082]
(7) В способе управления парковкой согласно одному или более вариантам осуществления настоящего изобретения доступны по меньшей мере два канала связи. В процессе управления удаленной парковкой обмен необходимой информацией выполняется между терминалом 5 управления и устройством 10 управления с использованием двух или более каналов связи, причём первая информация передается и принимается по первому каналу связи, а вторая информация передается и принимается по второму каналу связи. Когда значение оценки, относящееся к качеству связи для канала связи, меньше заданной пороговой величины, передача и прием выполняются с использованием одного или более других каналов связи, и маршрут парковки и/или управляющая команда для движения по маршруту парковки изменяются.
Когда качество связи для одного из каналов связи низкое, связь выполняется с использованием одного или более других каналов связи, и кроме того параметры, используемые при вычислении маршрута парковки, и/или параметры, используемые в процессе вычисления управляющей команды для перемещения транспортного средства V по маршруту парковки, изменяются, и процесс парковки выполняется на основании другого маршрута парковки или другой управляющей команды; таким образом, даже когда условия связи и состояние связи являются плохими, а качество связи ниже требуемого уровня, дистанционное управление парковкой может выполняться с учетом безопасности.
Дистанционное управление парковкой может быть исключено из–за невозможности следования маршруту парковки и управляющей команде (которые могут быть ненадежными) из–за низкого качества связи. В результате надежность функции дистанционного управления парковкой может быть повышена.
[0083]
(8) В способе управления парковкой в соответствии с одним или более вариантами осуществления настоящего изобретения устройство 10 управления изменяет первое расстояние запаса между транспортным средством V и препятствием, обнаруженным в окружении транспортного средства V на маршруте парковки, на второе расстояние запаса более первого расстояния запаса. В общем, маршрут парковки для движения транспортного средства V задается в положениях, в которых поддерживается заданное расстояние запаса для исключения сближения и/или контакта транспортного средства с окружающими препятствиями. В процессе парковки с дистанционным управлением управление легче, когда транспортное средство V движется на определенном расстоянии от препятствия, чем когда транспортное средство V движется в непосредственной близости от препятствия. В состоянии низкого качества связи расстояние запаса между транспортным средством V1 и препятствием изменяется на большое расстояние, чтобы снизить уровень сложности управления таким образом, чтобы оператор мог легко управлять транспортным средством V. Это позволяет оператору соответствующим образом выполнять управление для процесса парковки даже в условиях низкого качества связи. В одном или более вариантах осуществления настоящего изобретения, когда качество связи становится низким, маршрут парковки вычисляется с применением второго расстояния запаса, большего, чем первое расстояние запаса, применяемое, когда качество связи не ниже ожидаемого значения. Транспортное средство V, движущееся по маршруту парковки, в котором применяется второе расстояние запаса, движется в положении, более удаленном от препятствия. Посредством этой операции процесс парковки может выполняться даже в условиях низкого качества связи, при этом оператор чувствует себя в безопасности.
[0084]
(9) В способе управления парковкой в соответствии с одним или более вариантами осуществления настоящего изобретения, когда качество связи становится низким, управляющая команда вычисляется посредством применения второй верхней предельной скорости, меньшей, чем первая верхняя предельная скорость, применяемая, когда качество связи не ниже ожидаемого значения. Когда к управляющей команде применяется вторая верхняя предельная скорость, транспортное средство V движется по маршруту парковки относительно медленно. В процессе парковки с дистанционным управлением управление легче, когда транспортное средство V движется с низкой скоростью, чем когда транспортное средство V движется с высокой скоростью. В условиях низкого качества связи верхняя предельная скорость изменяется на низкую скорость, чтобы снизить уровень сложности управления таким образом, чтобы оператор мог легко управлять транспортным средством V. Это позволяет оператору надлежащим образом выполнять управление для процесса парковки даже в состоянии низкого качества связи. Кроме того, транспортное средство V как цель управления движется медленнее, чем обычно, и поэтому оператор может чувствовать себя в безопасности.
[0085]
(10) В способе управления парковкой в соответствии с одним или более вариантами осуществления настоящего изобретения, когда качество связи становится низким, управляющая команда вычисляется с применением второго верхнего предельного ускорения, меньшего, чем первого верхнее предельное ускорение, применяемое, когда качество связи не ниже ожидаемого значения. Когда к управляющей команде применяется второе верхнее предельное ускорение, транспортное средство V перемещается по маршруту парковки по существу с постоянной скоростью (со скоростью с небольшим изменением). В процессе дистанционного управления парковкой управление легче, когда транспортное средство V движется по существу на постоянной скорости, чем когда транспортное средство V движется с большим изменением скорости. В состоянии низкого качества связи верхнее предельное ускорение, применяемое к управляющей команде, изменяется на низкое ускорение, чтобы снизить уровень сложности управления таким образом, чтобы оператор мог легко управлять транспортным средством V. Это позволяет оператору надлежащим образом выполнять управление процессом парковки даже при низком качестве связи. Кроме того, транспортное средство V в качестве цели управления движется по существу с постоянной скоростью (в состоянии, в котором изменение скорости невелико), в отличие от обычного, и оператор может чувствовать себя в безопасности.
[0086]
(11) В способе управления парковкой в соответствии с одним или более вариантами осуществления настоящего изобретения, один или более других каналов связи, используемых, когда качество связи для первого канала связи и/или для второго канала связи является низким, могут представлять собой не только первый канал связи и/или второй канал связи, которые установлены как каналы по умолчанию, но и третий канал связи, отличный от первого канала связи и второго канала связи. Таким образом, один или более других каналов связи используются, когда качество связи для канала связи является низким, и процесс парковки может быть продолжен, даже если качество связи становится низким.
[0087]
(12) Вышеописанный способ управления парковкой может быть осуществлен с помощью устройства 100 управления парковкой в соответствии с одним или более вариантами осуществления настоящего изобретения. Поэтому устройство 100 управления парковкой в соответствии с одним или более вариантами осуществления настоящего изобретения демонстрирует вышеописанные действия и эффекты.
[0088]
(13) Вышеописанный способ управления парковкой может быть осуществлен с помощью устройства 100 управления парковкой в соответствии с одним или более вариантами осуществления настоящего изобретения. Поэтому устройство 100 управления парковкой в соответствии с одним или более вариантами осуществления настоящего изобретения демонстрирует вышеописанные действия и эффекты.
[0089]
Часть процесса управления парковкой или весь процесс в соответствии с одним или более вариантами осуществления настоящего изобретения может быть выполнен в устройстве 100 управления парковкой, или устройство 100 управления парковкой может передавать управляющие команды для парковки в терминал 5 управления таким образом, чтобы сторона терминала 5 управления выполняла их. Часть процессов управления парковкой или все процессы в соответствии с одним или более вариантами осуществления настоящего изобретения могут быть выполнены в терминале 5 управления, или терминал 5 управления может передавать управляющие команды для парковки в устройство 100 управления парковкой таким образом, чтобы сторона устройства 100 управления парковкой выполняла их.
[0090]
Варианты осуществления, поясняемые выше, описаны для облегчения понимания настоящего изобретения и не описаны для ограничения настоящего изобретения. Поэтому предполагается, что элементы, раскрытые в вышеприведённых вариантах осуществления, включают в себя все изменения в конструкции и эквиваленты, находящиеся в рамках технического объема настоящего изобретения.
[Описание ссылочных позиций]
[0091]
1000 Система управления парковкой
100 Устройство управления парковкой
10 Устройство управления
11 CPU
12 ROM
13 RAM
20 Устройство ввода
21 Устройство связи
30 Устройство вывода
31 Дисплей
1, 1а–1d Камеры
2 Устройства измерения расстояния
3 Информационный сервер
5 Терминал управления
200 Бортовое устройство
40 Система привода
50 Датчик угла поворота рулевого колеса
60 Датчик скорости транспортного средства
70 Контроллер
V Транспортное средство, транспортное средство как объект управления парковкой
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ УПРАВЛЕНИЯ ПАРКОВКОЙ И УСТРОЙСТВО УПРАВЛЕНИЯ ПАРКОВКОЙ | 2017 |
|
RU2733300C1 |
| СПОСОБ УПРАВЛЕНИЯ ПАРКОВКОЙ И УСТРОЙСТВО УПРАВЛЕНИЯ ПАРКОВКОЙ | 2017 |
|
RU2740661C1 |
| СПОСОБ УПРАВЛЕНИЯ ПАРКОВКОЙ И УСТРОЙСТВО УПРАВЛЕНИЯ ПАРКОВКОЙ | 2017 |
|
RU2735340C1 |
| СПОСОБ УПРАВЛЕНИЯ ПАРКОВКОЙ И УСТРОЙСТВО УПРАВЛЕНИЯ ПАРКОВКОЙ | 2017 |
|
RU2742530C1 |
| СПОСОБ УПРАВЛЕНИЯ ПАРКОВКОЙ И УСТРОЙСТВО УПРАВЛЕНИЯ ПАРКОВКОЙ | 2017 |
|
RU2736960C1 |
| СПОСОБ УПРАВЛЕНИЯ ПАРКОВКОЙ И АППАРАТУРА УПРАВЛЕНИЯ ПАРКОВКОЙ | 2017 |
|
RU2736520C1 |
| СПОСОБ УПРАВЛЕНИЯ ПАРКОВКОЙ И УСТРОЙСТВО УПРАВЛЕНИЯ ПАРКОВКОЙ | 2017 |
|
RU2736518C1 |
| СПОСОБ УПРАВЛЕНИЯ ПАРКОВКОЙ И УСТРОЙСТВО УПРАВЛЕНИЯ ПАРКОВКОЙ | 2017 |
|
RU2738780C1 |
| СПОСОБ УПРАВЛЕНИЯ ПАРКОВКОЙ И УСТРОЙСТВО УПРАВЛЕНИЯ ПАРКОВКОЙ | 2017 |
|
RU2740111C1 |
| СПОСОБ УПРАВЛЕНИЯ ПАРКОВКОЙ И АППАРАТУРА УПРАВЛЕНИЯ ПАРКОВКОЙ | 2017 |
|
RU2744447C1 |
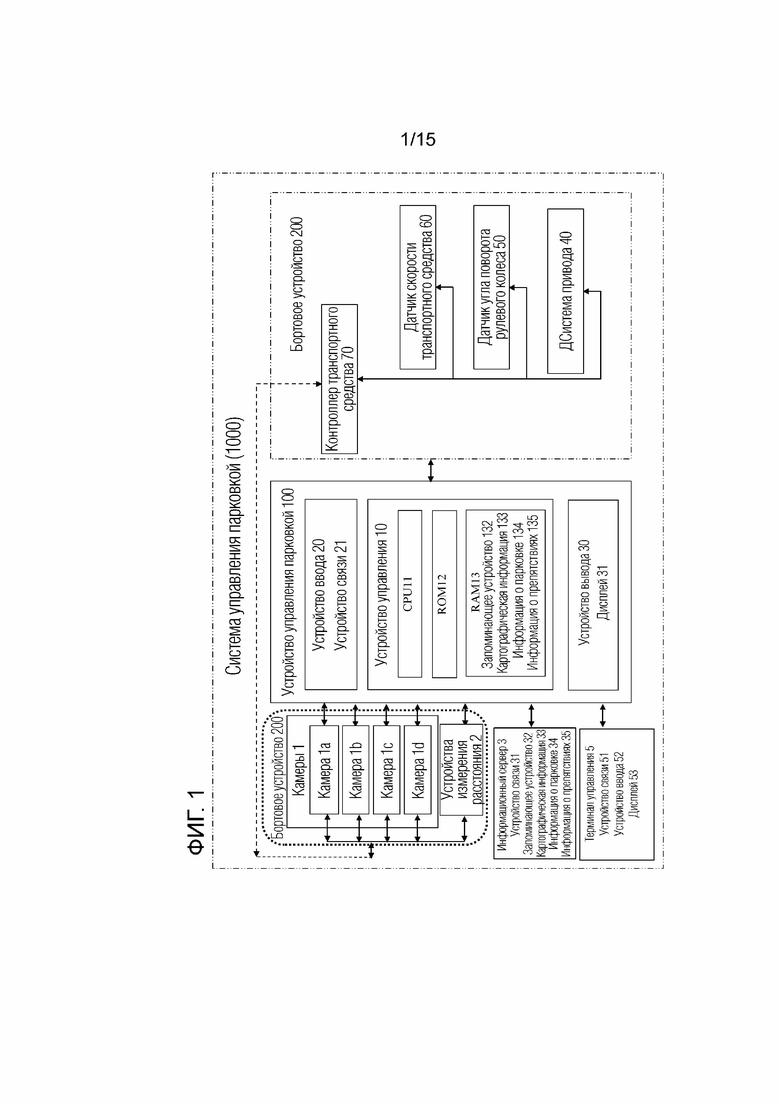
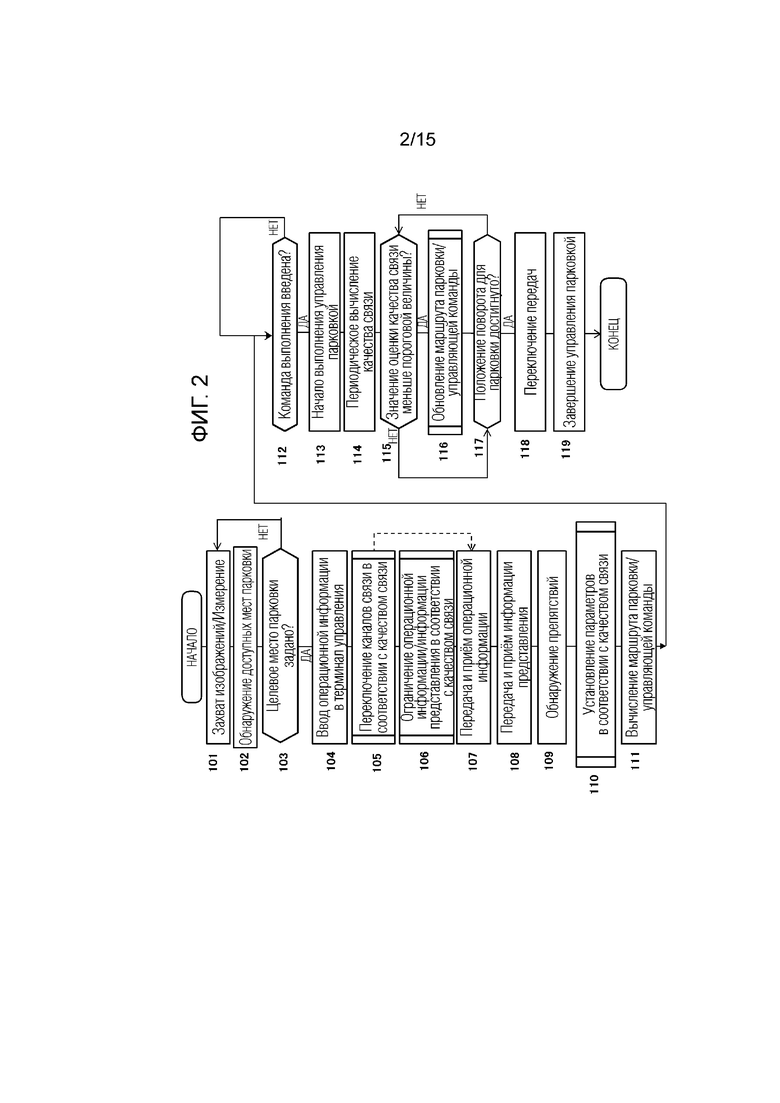

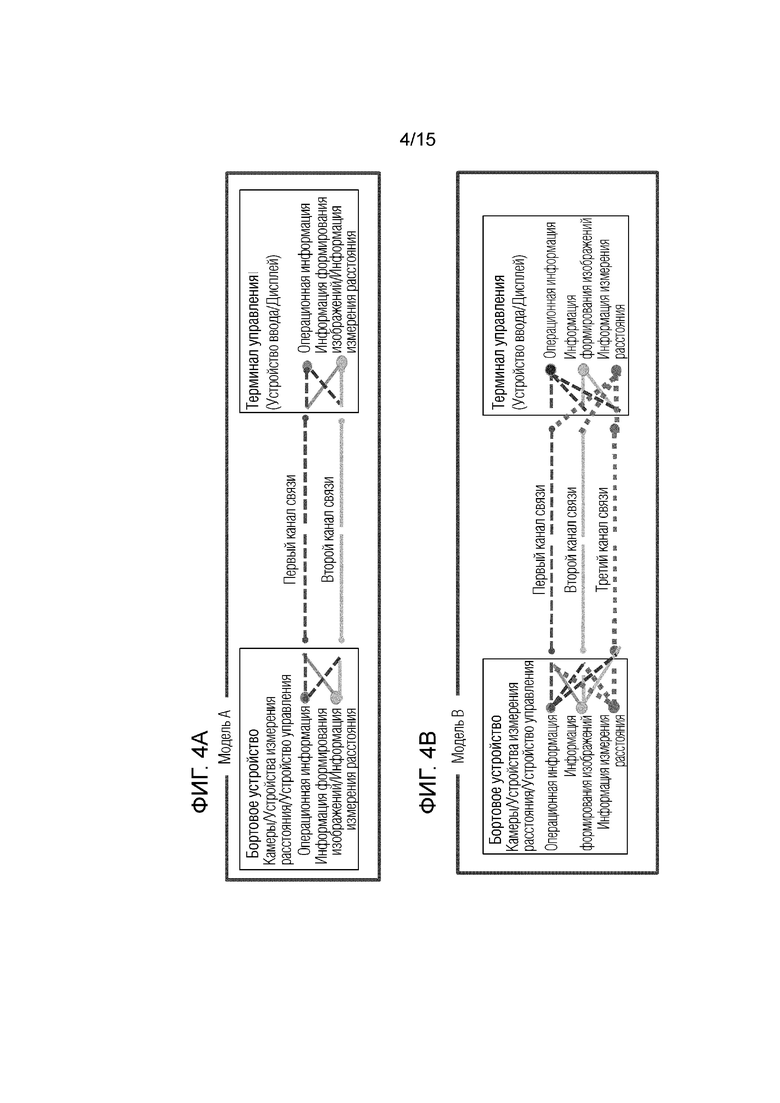
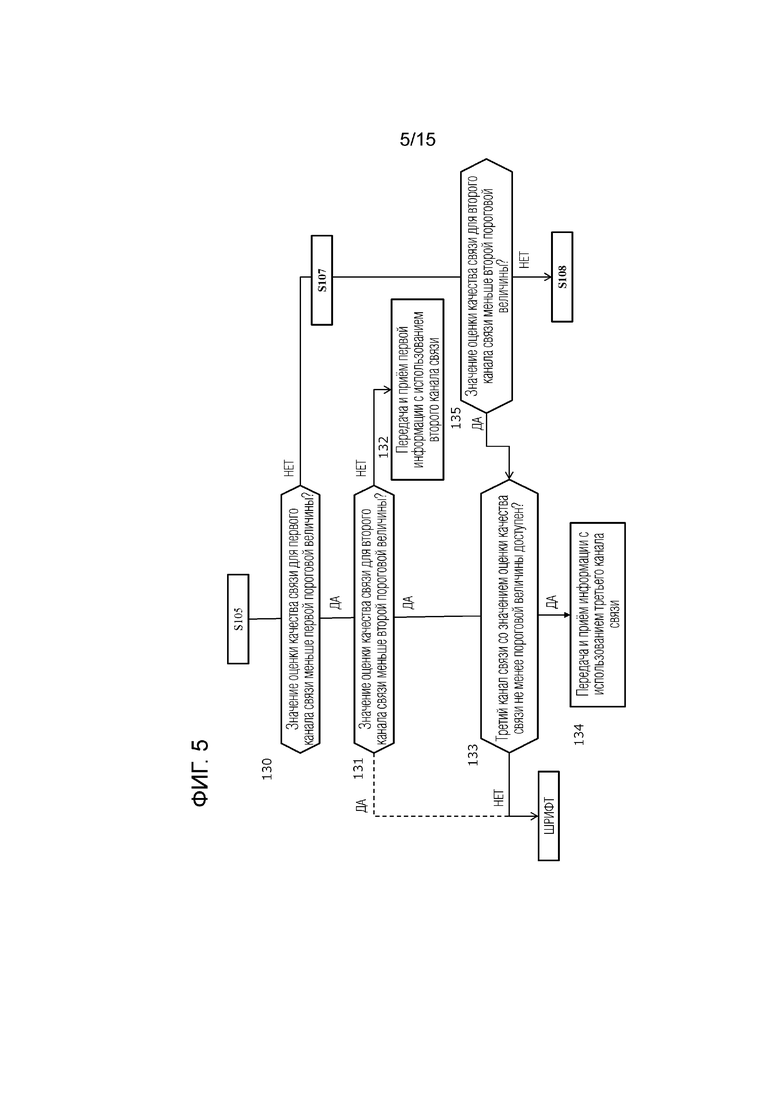
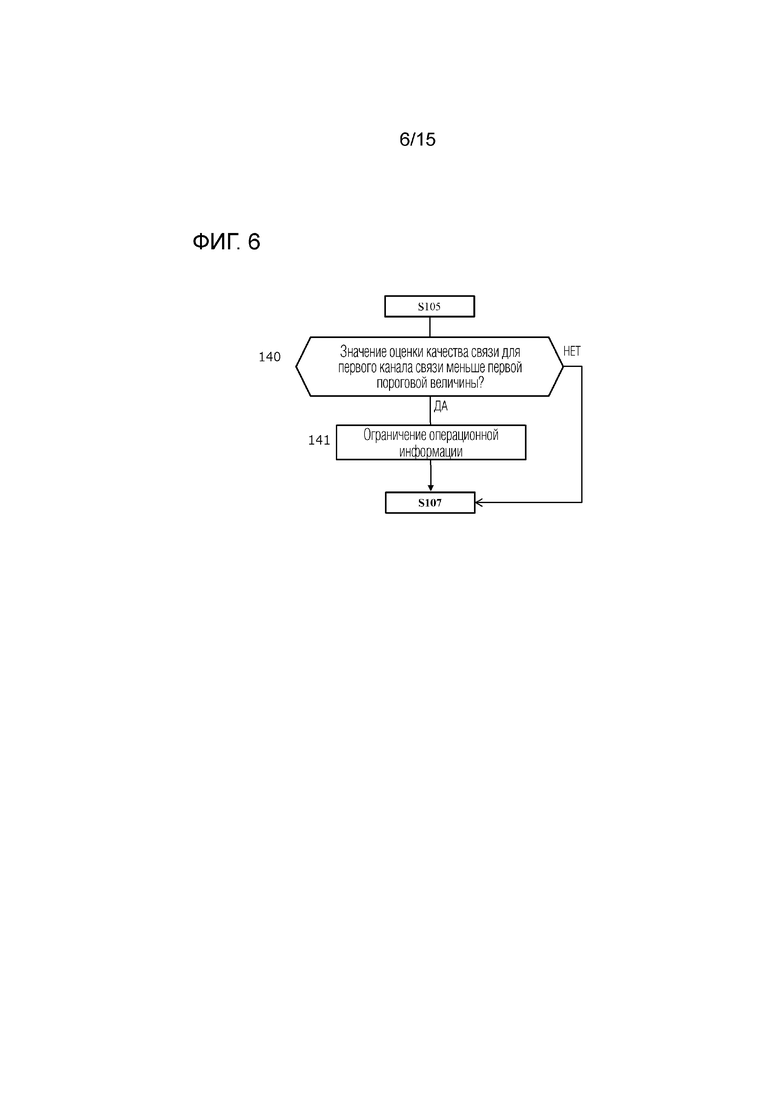
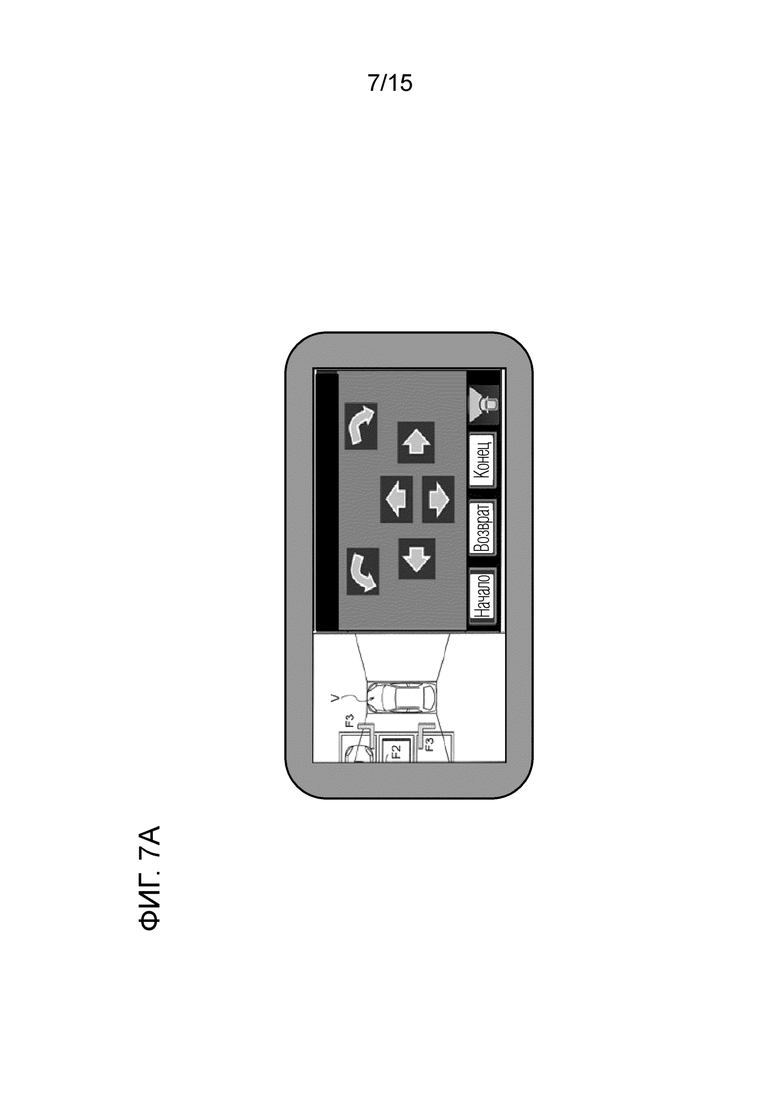
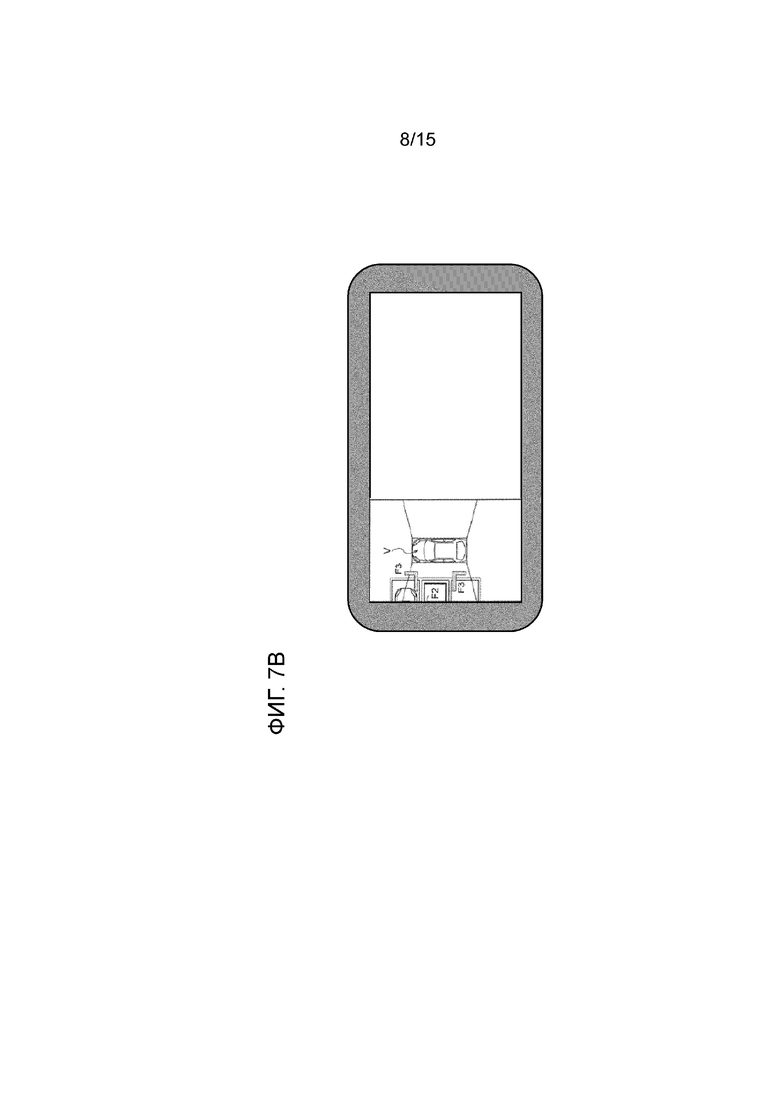
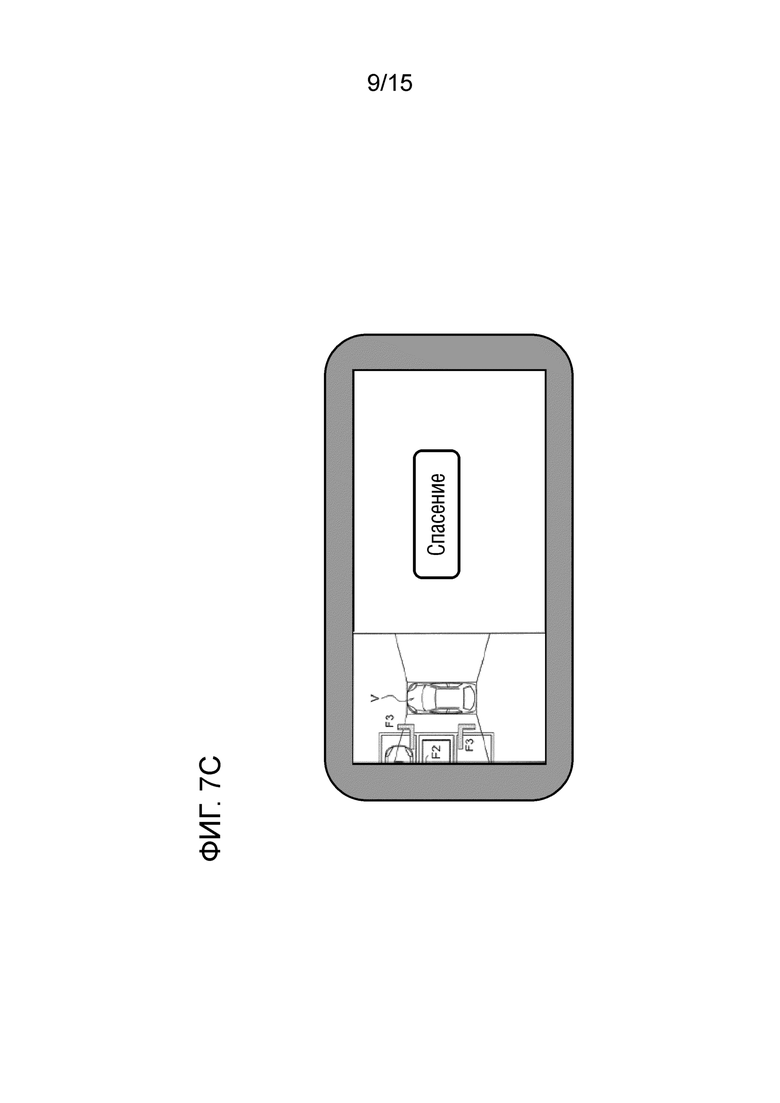
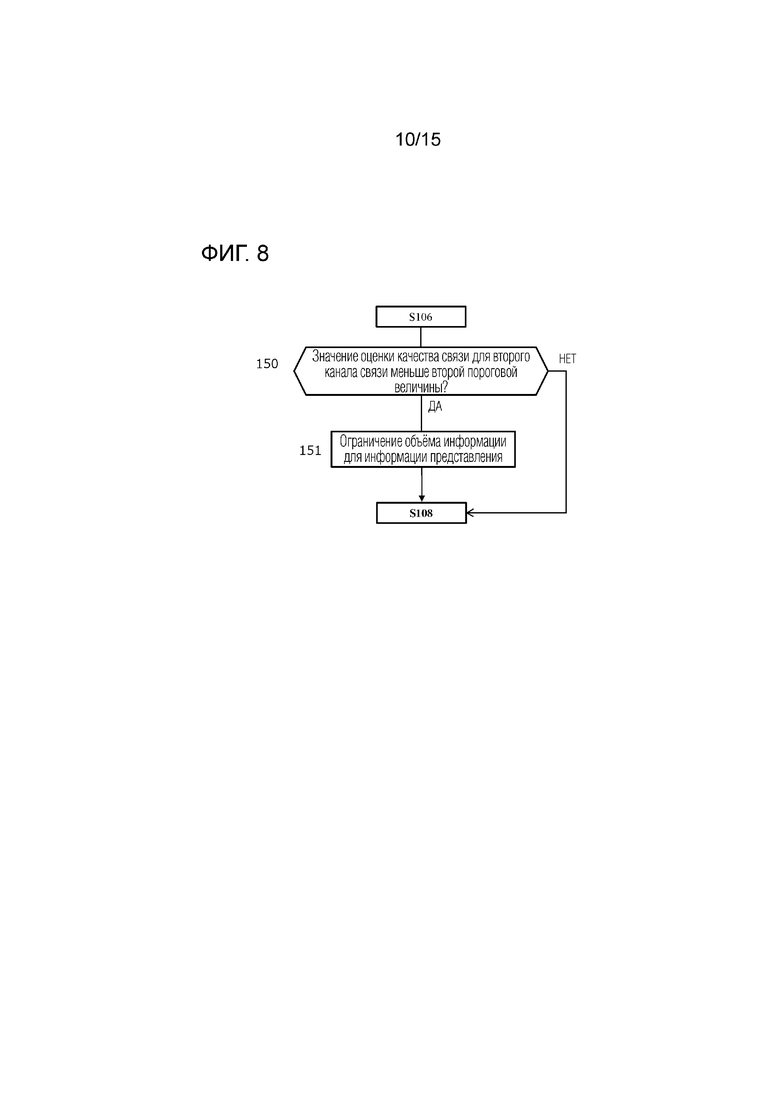

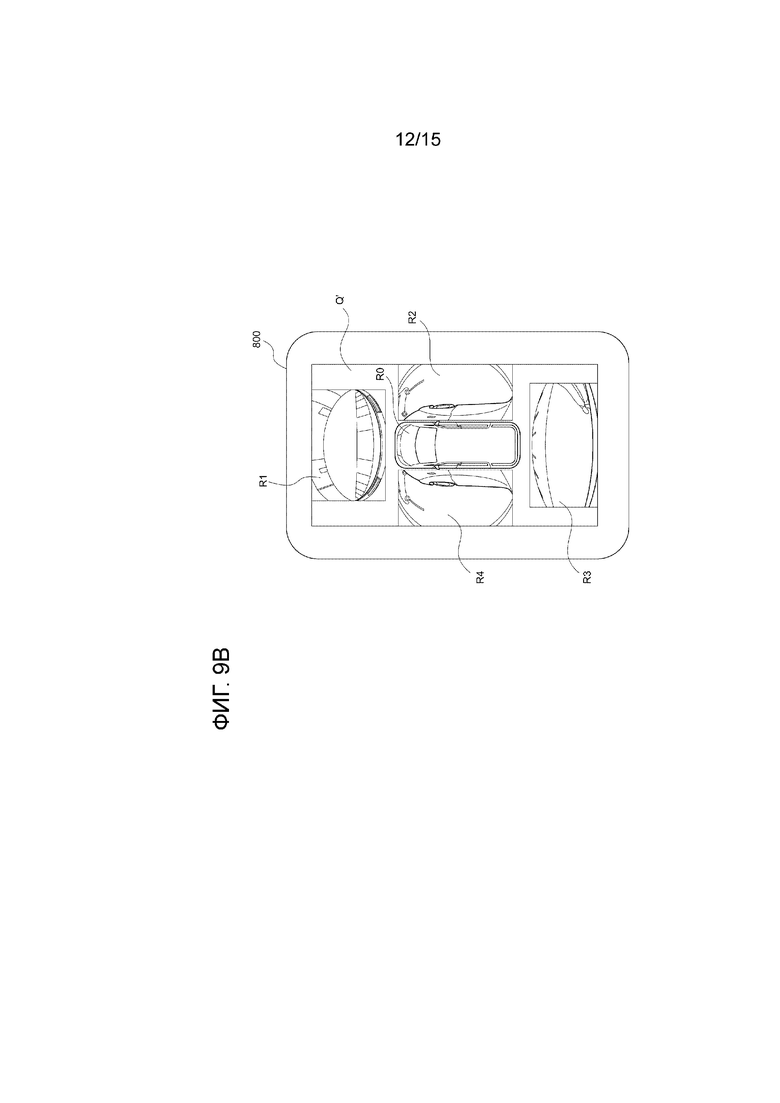
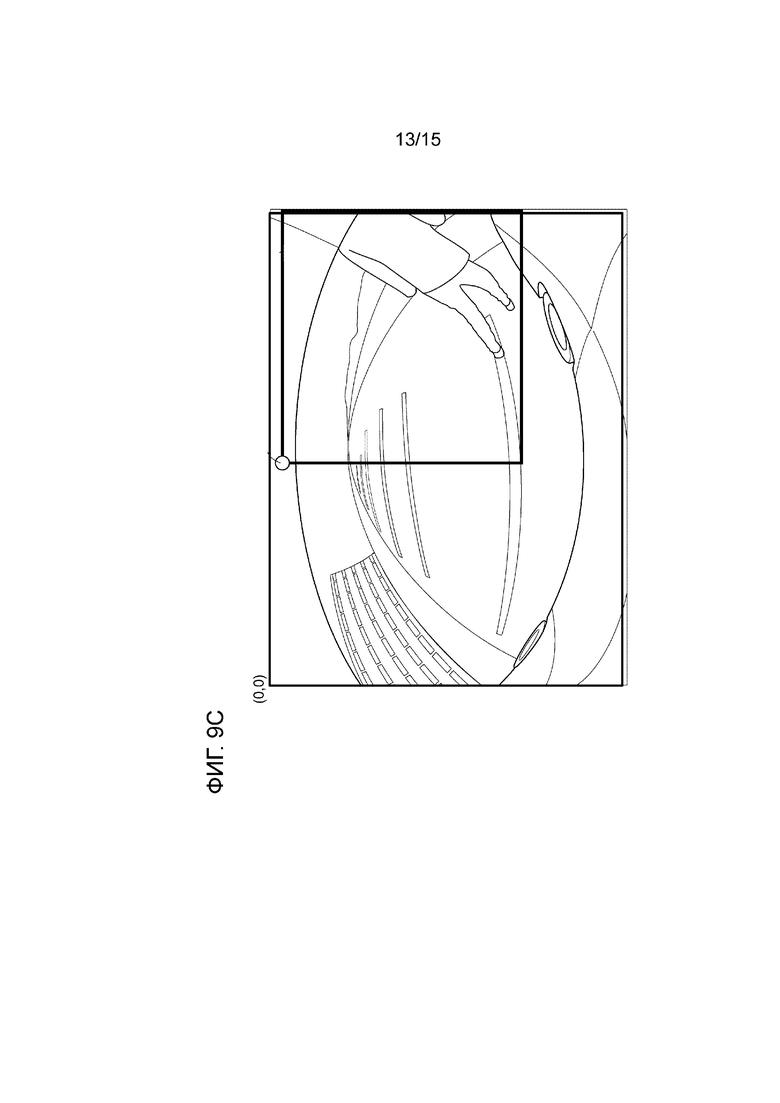
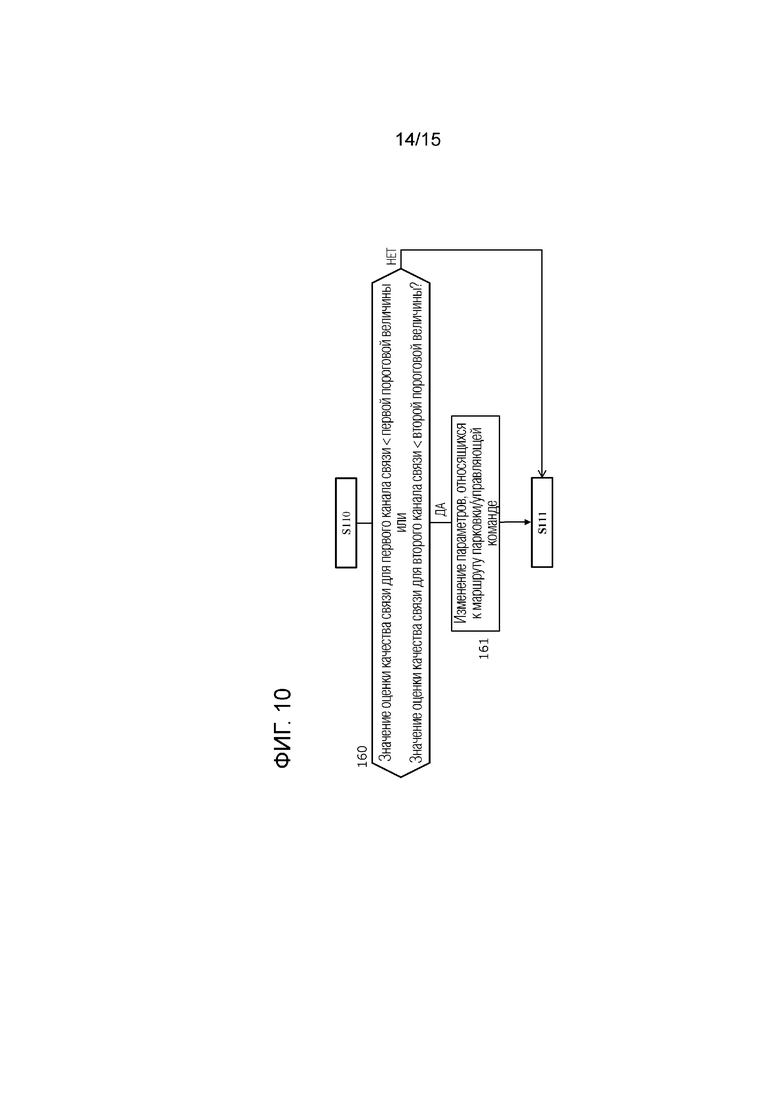
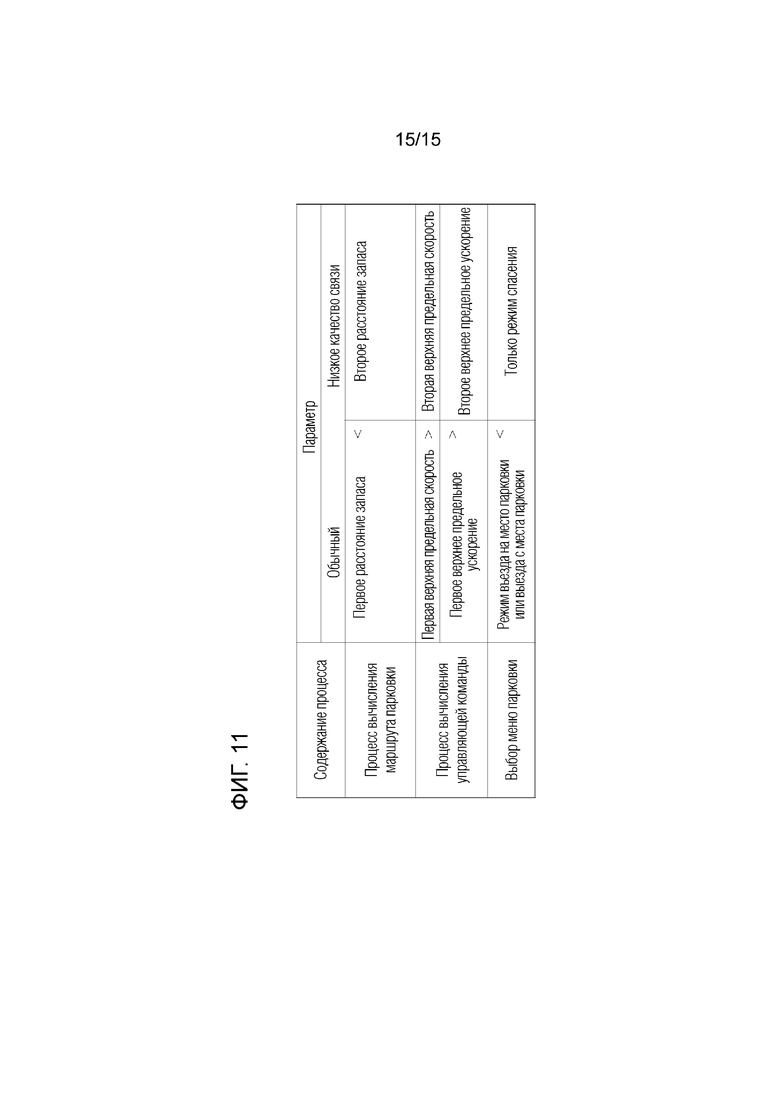
Настоящее изобретение относится к способу управления парковкой и устройству управления парковкой. Способ управления парковкой для парковки транспортного средства содержит этапы, на которых обмениваются первой информацией по первому каналу связи, обмениваются второй информацией по второму каналу связи, причем вторая информация включает в себя информацию представления, относящуюся к управлению парковкой. Если первое значение оценки меньше первой пороговой величины, обмениваются частью первой информации через один или более каналов связи, отличных от первого канала связи. Если второе значение оценки меньше второй пороговой величины, обмениваются по меньшей мере частью второй информации через один или более каналов связи, отличных от второго канала связи, и уменьшают объем информации для первой информации и/или второй информации или изменяют маршрут парковки или управляющую команду для движения по маршруту парковки. Устройство управления парковкой содержит устройство управления, выполненное с возможностью выполнения управляющей команды для движения по маршруту парковки, причем управляющая команда основана на операционной информации, вводимой в терминал управления, расположенный за пределами транспортного средства. Достигается повышение безопасности при парковке. 4 н. и 10 з.п. ф-лы, 16 ил.
1. Способ управления парковкой для парковки транспортного средства в соответствии с управляющей командой для движения по маршруту парковки, причём управляющая команда основана на операционной информации, вводимой в терминал управления, расположенный за пределами транспортного средства, причём способ управления парковкой содержит этапы, на которых
обмениваются первой информацией по первому каналу связи, причём первая информация включает в себя операционную информацию;
обмениваются второй информацией по второму каналу связи, причем вторая информация включает в себя информацию представления, относящуюся к управлению парковкой, причем информация представления представляется на терминале управления; и
если первое значение оценки, относящееся к качеству связи для первого канала связи, меньше первой пороговой величины, обмениваются по меньшей мере частью первой информации через один или более каналов связи, отличных от первого канала связи, причём если второе значение оценки, относящееся к качеству связи для второго канала связи, меньше второй пороговой величины, обмениваются по меньшей мере частью второй информации через один или более каналов связи, отличных от второго канала связи, и уменьшают объем информации для первой информации и/или второй информации.
2. Способ управления парковкой по п.1, содержащий этап, на котором
если первое значение оценки, относящееся к качеству связи для первого канала связи, меньше первой пороговой величины, уменьшают количество типов вводимой информации для операционной информации.
3. Способ управления парковкой по п.2, содержащий этап, на котором
если первое значение оценки, относящееся к качеству связи для первого канала связи, меньше первой пороговой величины, ограничивают вводимые режимы парковки в операционной информации режимом восстановления в направлении от целевого положения парковки.
4. Способ управления парковкой по п.1, содержащий этап, на котором
если второе значение оценки, относящееся к качеству связи для второго канала связи, меньше второй пороговой величины, уменьшают объем информации для информации представления.
5. Способ управления парковкой по п.4, содержащий этап, на котором
если второе значение оценки, относящееся к качеству связи для второго канала связи, меньше второй пороговой величины, заменяют информацию изображения, включенную в информацию представления, схематичным представлением.
6. Способ управления парковкой по п.4 или 5, содержащий этап, на котором
если второе значение оценки, относящееся к качеству связи для второго канала связи, меньше второй пороговой величины, уменьшают количество типов содержимого, включенных в информацию представления.
7. Способ управления парковкой для парковки транспортного средства в соответствии с управляющей командой для движения по маршруту парковки, причем управляющая команда основана на операционной информации, вводимой в терминал управления, расположенный за пределами транспортного средства, причем способ управления парковкой содержит этапы, на которых
обмениваются первой информацией через первый канал связи, причем первая информация включает в себя операционную информацию;
обмениваются второй информацией по второму каналу связи, причем вторая информация включает в себя информацию представления, относящуюся к управлению парковкой, причем информация представления представляется на терминале управления; и
если первое значение оценки, относящееся к качеству связи для первого канала связи, меньше первой пороговой величины, обмениваются по меньшей мере частью первой информации через один или более каналов связи, отличных от первого канала связи, при этом если второе значение оценки, относящееся к качеству связи для второго канала связи меньше второй пороговой величины, обмениваются по меньшей мере частью второй информации через один или более каналов связи, отличных от второго канала связи, и изменяют маршрут парковки или управляющую команду для движения по маршруту парковки.
8. Способ управления парковкой по п.7, в котором процесс вычисления маршрута парковки включает в себя этап, на котором изменяют первое расстояние запаса между транспортным средством и препятствием, обнаруженным в окружении транспортного средства на маршруте парковки, во второе расстояние запаса, большее, чем первое расстояние запаса.
9. Способ управления парковкой по п.7 или 8, в котором процесс изменения управляющей команды включает в себя этап, на котором изменяют первую верхнюю предельную скорость транспортного средства в управляющей команде во вторую верхнюю предельную скорость, меньшую, чем первая верхняя предельная скорость.
10. Способ управления парковкой по п.7, в котором процесс изменения управляющей команды включает в себя этап, на котором изменяют первое верхнее предельное ускорение транспортного средства в управляющей команде во второе верхнее предельное ускорение, меньшее, чем первое верхнее предельное ускорение.
11. Способ управления парковкой по п.1, в котором один или более других каналов связи включают в себя первый канал связи, второй канал связи и третий канал связи, отличный от первого канала связи и второго канала связи.
12. Способ управления парковкой по п.7, в котором один или более других каналов связи включают в себя первый канал связи, второй канал связи и третий канал связи, отличный от первого канала связи и второго канала связи.
13. Устройство управления парковкой, содержащее устройство управления, выполненное с возможностью выполнения управляющей команды для движения по маршруту парковки, причем управляющая команда основана на операционной информации, вводимой в терминал управления, расположенный за пределами транспортного средства, причем устройство управления дополнительно выполнено с возможностью
обмена первой информацией через первый канал связи, причем первая информация включает в себя операционную информацию;
обмена второй информацией через второй канал связи, причем вторая информация включает в себя информацию представления, относящуюся к управлению парковкой, причем информация представления представляется на терминале управления; и
если первое значение оценки, относящееся к качеству связи для первого канала связи, меньше первой пороговой величины, обмена по меньшей мере частью первой информации через один или более каналов связи, отличных от первого канала связи, причём если второе значение оценки, относящееся к качеству связи для второго канала связи, меньше второй пороговой величины, обмена по меньшей мере частью второй информации через один или более каналов связи, отличных от второго канала связи, и уменьшения объема информации для первой информации и/или второй информации.
14. Устройство управления парковкой, содержащее устройство управления, выполненное с возможностью выполнения управляющей команды для движения по маршруту парковки, причем управляющая команда основана на операционной информации, вводимой в терминал управления, расположенный за пределами транспортного средства, причем устройство управления дополнительно выполнено с возможностью
обмена первой информацией через первый канал связи, причем первая информация включает в себя операционную информацию;
обмена второй информацией через второй канал связи, причем вторая информация включает в себя информацию представления, относящуюся к управлению парковкой, причем информация представления представляется на терминале управления; и
если первое значение оценки, относящееся к качеству связи для первого канала связи, меньше первой пороговой величины, обмена по меньшей мере частью первой информации через один или более каналов связи, отличных от первого канала связи, причём если второе значение оценки, относящееся к качеству связи для второго канала связи меньше второй пороговой величины, обмена по меньшей мере частью второй информации через один или более каналов связи, отличных от второго канала связи, и изменения маршрута парковки или управляющей команды для движения по маршруту парковки.
| US 2014365032 A1, 11.12.2014 | |||
| WO 2013041337 A1, 28.03.2013 | |||
| JP 2016185745 A, 27.10.2016 | |||
| JP 2016007959 A, 18.01.2016. |

