Область техники
[0001] Настоящее изобретение относится к способу помощи при парковке и устройству управления парковкой.
УРОВЕНЬ ТЕХНИКИ
[0002] Традиционно известно устройство управления парковкой для поддержки операции вождения при парковке транспортного средства в зоне парковки, такой как парковочное место, описанное, например, в патентной литературе. Патентный документ 1 раскрывает связи между концами линий парковочной разметки для установки участка целевого назначения.
СПИСОК ЦИТИРУЕМОЙ ЛИТЕРАТУРЫ
ПАТЕНТНАЯ ЛИТЕРАТУРА
[0003] Патентный документ 1: выложенная публикация заявки на патент Японии № 2015–74257.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
ТЕХНИЧЕСКАЯ ПРОБЛЕМА
[0004] Однако, поскольку в традиционном примере, раскрытом в патентном документе 1, просто выполняется управление парковкой так, что транспортное средство находится в пределах секции целевого назначения, он не позволяет предположить, что транспортное средство может выступать за секцию целевого назначения. Следовательно, существует вероятность того, что транспортное средство не сможет припарковаться в подходящем положении в секции целевого назначения.
[0005] Настоящее изобретение было создано в свете вышеупомянутой проблемы, и задача настоящего изобретения состоит в том, чтобы предоставить способ помощи при парковке и устройство управления парковкой для обеспечения возможности парковки транспортного средства в подходящем положении.
РЕШЕНИЕ ПРОБЛЕМЫ
[0006] Способ помощи при парковке в соответствии с одним аспектом настоящего изобретения, содержащий этапы, на которых: обнаруживают первую линию разметки свободного парковочного места в направлении, ортогональном направлению по ширине транспортного средства, и вторую линию разметки; устанавливают цель парковки на прямой линии, соединяющей точку на первой линии разметки и точку на второй линии разметки; и выполняют управление парковкой так, чтобы положение колес рассматриваемого транспортного средства совпадало с целью парковки.
ПРЕИМУЩЕСТВЕННЫЕ ЭФФЕКТЫ ИЗОБРЕТЕНИЯ
[0007] Согласно способу помощи при парковке по настоящему изобретению транспортное средство может быть припарковано в подходящем положении свободного парковочного места.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
[0008] Фиг. 1 является блок–схемой для иллюстрации частичной конфигурации транспортного средства, в котором смонтировано устройство управления парковкой согласно варианту осуществления настоящего изобретения.
Фиг. 2 – блок–схема, показывающая подробную конфигурацию блока обработки информации изображений и блока управления помощью парковке устройства управления парковкой, показанного на фиг.1.
Фиг. 3 – схематичный рисунок, показывающий маршрут движения, когда транспортное средство перемещается задом, чтобы войти в свободное парковочное место.
Фиг. 4 – схематичный рисунок, показывающий маршрут движения, когда транспортное средство движется передом, чтобы войти в свободное парковочное место.
Фиг. 5 – блок–схема последовательности операций, показывающая процедуру обработки устройства управления парковкой, показанного на фиг. 1.
Фиг. 6A – график, показывающий взаимосвязь между положением и скоростью транспортного средства на целевом маршруте при парковке транспортного средства на свободном парковочном месте, показывающий изменения целевой скорости и фактической скорости.
Фиг. 6B – график, показывающий взаимосвязь между положением и скоростью транспортного средства на целевом маршруте при парковке транспортного средства на свободном парковочном месте, показывающий изменения скорректированной целевой скорости и фактической скорости.
Фиг. 7 – пояснительный рисунок, показывающий целевой маршрут при перемещении транспортного средства в целевое положение парковки из исходного положения и маршрут движения, когда возникает отклонение из–за расстояния свободного хода.
Фиг. 8A – график, показывающий взаимосвязь положения и угла поворота руля по целевому маршруту при парковке транспортного средства в зоне парковки, показывающий изменения целевого угла поворота руля и фактического угла поворота руля.
Фиг. 8B – график, показывающий взаимосвязь положения и угла поворота руля по целевому маршруту при парковке транспортного средства в зоне парковки, показывающий изменения целевого угла поворота руля и скорректированного целевого угла поворота руля.
Фиг. 9 – пояснительный рисунок, показывающий целевой маршрут при перемещении транспортного средства в целевое положение парковки из исходного положения и маршрут движения, когда возникает отклонение из–за последующей задержки угла поворота руля.
Фиг. 10A – график, показывающий взаимосвязь положения и угла поворота руля по целевому маршруту при парковке транспортного средства в парковочном месте, показывающий изменения целевого угла поворота руля и фактического угла поворота руля, когда возникает установившееся отклонение.
Фиг. 10B – график, показывающий взаимосвязь положения и угла поворота руля по целевому маршруту при парковке транспортного средства в парковочном месте, показывающий изменения в скорректированном целевом угле поворота руля и фактическом угле поворота руля при применении скорректированного целевого угла поворота руля.
Фиг. 11 – блок–схема последовательности операций, показывающая процедуру обработки устройства управления парковкой согласно варианту осуществления настоящего изобретения.
Фиг. 12 – блок–схема последовательности операций, показывающая процедуру обработки с установкой цели парковки согласно варианту осуществления настоящего изобретения.
Фиг. 13A – вид сверху парковочного места и транспортного средства, когда длины первой и второй линий разметки больше, чем общая длина транспортного средства (рассматриваемого транспортного средства), и является схемой, показывающей случай парковки задом.
Фиг. 13B – вид сверху парковочного места и транспортного средства, когда длины первой и второй линий разметки больше, чем общая длина транспортного средства (рассматриваемого транспортного средства), и является схемой, показывающей случай парковки передом.
Фиг. 14A – вид сверху парковочного места и транспортного средства, когда длины первой и второй линий разметки меньше, чем колесная база транспортного средства (рассматриваемого транспортного средства), и является схемой, показывающей случай парковки задом.
Фиг. 14B – вид сверху парковочного места и транспортного средства, когда длины первой и второй линий разметки меньше, чем колесная база транспортного средства (рассматриваемого транспортного средства), и является схемой, показывающей случай парковки передом.
Фиг. 15A – вид сверху парковочного места и транспортного средства, когда длины первой и второй линий разметки больше, чем колесная база транспортного средства (рассматриваемого транспортного средства), и меньше, чем общая длина транспортного средства, и является схемой, показывающей случай парковки задом.
Фиг. 15B – вид сверху парковочного места и транспортного средства, когда длины первой и второй линий разметки больше, чем колесная база транспортного средства (рассматриваемого транспортного средства), и меньше, чем общая длина транспортного средства, и является схемой, показывающей случай парковки передом.
Фиг. 16A – вид сверху парковочного места и транспортного средства, когда остается только конец на дальней стороне в направлении заезда транспортного средства по первой и второй линиям разметки, и является схемой, показывающей случай парковки задом.
Фиг. 16B – вид сверху парковочного пространства и транспортного средства, когда остается только конец на дальней стороне в направлении заезда транспортного средства по первой и второй линиям разметки, и является схемой, показывающей случай парковки передом.
Фиг. 17A – вид сверху парковочного места и транспортного средства, когда остается только конец на ближней стороне в направлении заезда транспортного средства по первой и второй линиям разметки, и является схемой, показывающей случай парковки задом.
Фиг. 17B – вид сверху парковочного места и транспортного средства, когда остается только конец на ближней стороне в направлении заезда транспортного средства по первой и второй линиям разметки, и является схемой, показывающей случай парковки передом.
Фиг. 18А – вид сверху парковочного места и транспортного средства, когда длины первой и второй линий разметки отличаются друг от друга, и является схемой, показывающей случай парковки задом.
Фиг. 18B – вид сверху парковочного места и транспортного средства, когда длины первой и второй линий разметки отличаются друг от друга, и является схемой, показывающей случай парковки передом.
Описание вариантов осуществления
[0009] Ниже будут приведены описания вариантов осуществления настоящего изобретения на основе чертежей.
[0010] На фиг.1 показана блок–схема, иллюстрирующая частичную конфигурацию транспортного средства, в котором смонтировано устройство управления парковкой в соответствии с вариантом осуществления настоящего изобретения. Как показано на фиг.1, это устройство 100 управления парковкой генерирует сигнал управления углом поворота руля и сигнал управления скоростью, которые выводятся в электронный блок управления (ЭБУ) 40 транспортного средства. Термин «парковка», используемый в настоящем варианте осуществления, означает перемещение транспортного средства к свободному парковочному месту и остановку транспортного средства на свободном парковочном месте. Для транспортного средства это означает перемещение на свободное парковочное место и остановку на свободном парковочном месте для, чтобы оставить транспортное средство на парковочном месте на стоянке.
[0011] Устройство 100 управления парковкой включает в себя датчик 10 обнаружения целевой парковочной разметки, блок 20 обработки информации изображений (контур установки целевого положения) и блок 30 расчета помощи парковке (контур управления транспортным средством).
[0012] Датчик 10 обнаружения целевой парковочной разметки выполнен из множества камер, которые снимают, например, окружение транспортного средства. Камера 10а установлена впереди транспортного средства и снимает перед транспортным средством. Камера 10b установлена сзади транспортного средства и снимает позади транспортного средства. Камера 10с установлена на левой стороне транспортного средства и снимает с левой стороны от транспортного средства. Камера 10d установлена на правой стороне транспортного средства и снимает с правой стороны от транспортного средства. Каждая камера установлена со стороны ниже от крыши транспортного средства.
[0013] Датчик 10 обнаружения целевой парковочной разметки может быть выполнен из другого(их) датчика (датчиков). Например, он может быть выполнен с лазерным дальномером (ЛДМ) для излучения инфракрасного лазера на объект и измерения расстояния до объекта на основе интенсивности отраженного света или тому подобного. Он также может обнаруживать длину, например, белой линии для обозначения парковочного места, на основе интенсивности отраженного света. В качестве альтернативы, можно использовать парктроник с ультразвуковой волной. Альтернативно, датчик 10 обнаружения целевой парковочной разметки не всегда может быть датчиками, установленными в транспортном средстве, но может быть датчиками (например, камерой на стоянке, датчиком или камерой, имеющимися в другом транспортном средстве), установленными в окружении рассматриваемого транспортного средства. В этом случае данные, полученные датчиками, установленными в окружении транспортного средства, могут быть переданы в рассматриваемое транспортное средство с использованием беспроводной связи. В настоящем варианте осуществления будет пояснен пример конфигурации датчика 10 обнаружения целевой парковочной разметки с помощью камеры, установленной в рассматриваемом транспортном средстве (транспортном средстве-хозяине).
[0014] Блок 20 обработки информации изображений выполняет распознавание изображений с информацией об окружении рассматриваемого транспортного средства, снятой датчиком 10 обнаружения целевой парковочной разметки, и генерирует необходимую для помощи парковке информацию. Эта информация выводится в блок 30 расчета помощи парковке. Необходимая для помощи парковке информация будет подробно указана ниже.
[0015] К блоку 30 расчета помощи парковке подключены интерфейс 51 ввода, датчик 52 частоты вращения колеса и датчик 53 угла поворота руля в дополнение к блоку 20 обработки информации изображений. Кроме того, выход блока 30 расчета помощи парковке подключен к ЭБУ 40 транспортного средства.
[0016] Датчик 10 обнаружения целевой парковочной разметки дополнительно включает в себя контур 10e обнаружения линий разметки, выполненный с возможностью обнаружения первой линии разметки свободного парковочного места в направлении, ортогональном направлению по ширине транспортного средства, и второй линии разметки, которая образует пару с первой линией разметки, из изображения, захваченного каждой камерой (10a–10d). Контур 20 установки целевого положения устанавливает цель парковки на прямой линии, соединяющей между собой точку на первой линии разметки и точку на второй линии разметки. Контур 30 управления транспортным средством выполняет управление парковкой так, чтобы положение колес рассматриваемого транспортного средства совпало с целью парковки. Более конкретно, контур 30 управления транспортным средством генерирует целевой маршрут парковки к цели парковки, управляет положением рассматриваемого транспортного средства, ориентацией рассматриваемого транспортного средства и скоростью рассматриваемого транспортного средства так, чтобы оно двигалось по сгенерированному целевому маршруту парковки, и выполняет управление остановом так, чтобы заданное положение рассматриваемого транспортного средства (колес, конца транспортного средства) совпало с целевым положением. Кроме того, нет необходимости указывать первую линию разметки и вторую линию разметки в настоящем варианте осуществления среди линий разметки, составляющих парковочное место. То есть первая линия разметки может быть любой из ближней стороны или дальней стороны в направлении по ширине транспортного средства парковочного места, и может быть любой из его более длинной стороны или более короткой стороны. Кроме того, при определении длины первой линии разметки и сравнении длины первой линии разметки с общей длиной рассматриваемого транспортного средства и длиной между передним колесом и задним колесом рассматриваемого транспортного средства, первая линия разметки может быть любой из двух линий разметки, составляющих парковочное место.
[0017] Согласно устройству 100 управления парковкой, включающему в себя датчик 10 обнаружения целевой парковочной разметки, контур 20 установки целевого положения и контур 30 управления транспортным средством, рассматриваемое транспортное средство может быть припарковано в подходящем положении свободного парковочного места.
[0018] Интерфейс 51 ввода представляет собой терминал, выполненный с возможностью ввода различной информации относительно регулировки положения парковки оператором, выбора положения парковки, способа парковки (парковка передом, парковка задом) и т.п. В транспортном средстве могут быть предусмотрены различные устанавливаемые в нем устройства ввода операций и т. д., такие как джойстик, переключатель работы, сенсорная панель, при условии, что оператор садиться в него. Кроме того, аудиосистема может помогать водителю выдавать различные рабочие сигналы с помощью динамика, установленного в транспортном средстве.
[0019] Датчик 52 частоты вращения колеса представляет собой датчик для определения частоты вращения колеса рассматриваемого транспортного средства.
[0020] Датчик 53 угла поворота руля является датчиком для определения угла поворота руля рассматриваемого транспортного средства, и для этого обычно используется кодовый датчик положения, прикрепленный к оси вращения рулевого управления.
[0021] Блок 30 расчета помощи парковке генерирует сигнал управления углом поворота руля и сигнал управления скоростью на основе различной информации с учетом всей информации, необходимой для помощи парковке, сгенерированной блоком 20 обработки информации изображений, информации о частоте вращения колеса рассматриваемого транспортного средства, обнаруженной датчиком 52 частоты вращения колеса, информации об угле поворота руля, обнаруженной датчиком 53 угла поворота руля, и положения парковки, вводимого в интерфейс 51 ввода.
[0022] Сигнал управления углом поворота руля и сигнал управления скоростью, генерируемые блоком 30 расчета помощи парковке, вводятся в ЭБУ 40 транспортного средства. Кроме того, датчик 52 частоты вращения колеса и датчик 53 угла поворота руля подключены к ЭБУ 40 транспортного средства. Выход ЭБУ 40 транспортного средства соединен с исполнительным механизмом 50 для управления рулем, скоростью транспортного средства и т.п.
[0023] Блок 20 обработки информации изображений и ЭБУ 40 транспортного средства могут быть выполнены как, например, встроенный компьютер, включающий в себя центральный процессор (ЦП), оперативное запоминающее устройство (ОЗУ), постоянное запоминающее устройство (ПЗУ) и средства хранения, такие как жесткий диск.
[0024] Фиг.2 – блок-схема, показывающая подробную конфигурацию блока 20 обработки информации изображений и блока 30 расчета помощи парковке. Блок 20 обработки информации изображений включает в себя блок 21 обнаружения целевой парковочной разметки, блок 22 установки целевого положения парковки, блок 23 установки начального положения парковки и блок 24 оценки текущего положения.
[0025] Блок 21 обнаружения целевой парковочной разметки выводит положение целевой парковочной разметки, которое является тем положением, куда паркуется рассматриваемое транспортное средство, с использованием первой линии разметки и второй линии разметки, обнаруженных контуром 10e обнаружения линий разметки. Блок 21 обнаружения целевой парковочной разметки может обнаруживать первую линию разметки свободного парковочного места в направлении, ортогональном направлению по ширине транспортного средства, и вторую линию разметки, которая образует пару с первой линией разметки, из изображения, снятого датчиком 10 обнаружения целевой парковочной разметки, и может выводить положение целевой парковочной разметки. При обнаружении множества свободных парковочных мест в качестве положения целевой парковочной разметки может использоваться то свободное парковочное место, на которое легче всего припарковаться (с более коротким временем парковки, с более коротким расстоянием парковки, с меньшими мертвыми углами и т. д.).
[0026] Кроме того, положение целевой парковочной разметки задается операцией, вводимой из интерфейса 51 ввода, за счет чего может быть изменено положение целевой парковочной разметки, которое выводится из блока 21 обнаружения целевой парковочной разметки. Например, также возможно остановить парковку до положения целевой парковочной разметки, а также можно изменить его на другое свободное парковочное место среди множества свободных парковочных мест.
[0027] Фиг.3 – схематичный рисунок, показывающий маршрут движения при заезде транспортного средства V1 в свободное парковочное место. Ссылочное обозначение X1 на этом рисунке представляет парковочное пространство, распознаваемое блоком 20 обработки информации изображений. Ссылочное обозначение R1 представляет полосу движения. Полоса движения R1 на фиг.3 установлена перпендикулярной (в ортогональном направлении) продольному направлению транспортного средства на парковочном месте. Кроме того, направление полосы движения R1 к парковочному месту в настоящем варианте осуществления может быть произвольным направлением, независимо от вида направления. Положение целевой парковочной разметки, выводимое из блока 21 обнаружения целевой парковочной разметки, включает в себя каждую координату и длину каждой из первой линии W1 разметки и второй линии W2 разметки. Координата – это двумерная координата на парковочном пространстве X1. Первая линия W1 разметки и вторая линия W2 разметки на рисунке демонстрируют пример, в котором транспортное средство V1 детектируется, например, в положении исходного положения p1.
[0028] Блок 22 установки целевого положения парковки устанавливает цель парковки на прямой линии L, соединяющей между собой точку на первой линии W1 разметки и точку на второй линии W2 разметки. На фиг.3 показан пример, в котором добиваются совпадения конца колеса с задней стороны (заднего конца заднего колеса) транспортного средства V1 с целью p3 парковки. Кроме того, положение на транспортном средстве V1, которое должно совпадать с целью p3 парковки, изменяется в зависимости от длины первой и второй линий W1 и W2 разметки и способа парковки (парковка задом или парковка передом). Точки, которые выделяют прямую линию L, соединяющую первую и вторую линии W1 и W2 разметки цели p3 парковки, также изменяются. Такие изменяющиеся примеры будут указаны ниже. Кроме того, то положение на транспортном средстве V1, которое должно совпадать с целью p3 парковки, может быть любым положением заднего колеса транспортного средства V1 и может быть задано как задний конец, центр колеса или заданное положение от центра колеса.
[0029] Блок 23 установки начального положения парковки устанавливает исходное положение p1, положение p2 начала парковки и цель p3 парковки по изображению, захваченному датчиком 10 обнаружения целевой парковочной разметки. Положение p2 начала парковки является положением разворота для направления транспортного средства V1 к цели p3 парковки и в дальнейшем называется положением p2 разворота.
[0030] Блок 24 оценки текущего положения оценивает текущее положение транспортного средства V1 по белой линии (первой линии W1 разметки, второй линии W2 разметки), захваченной датчиком 10 обнаружения целевой парковочной разметки, результат распознавания объекта и взаимное относительное расположение транспортного средства V1.
[0031] Блок 30 расчета помощи парковке (фиг.2) включает в себя блок 31 формирования маршрута парковки, блок 32 управления отслеживанием маршрута парковки, блок 33 управления углом поворота руля, блок 34 генерации целевой скорости и блок 35 управления скоростью.
[0032] Блок 31 формирования маршрута парковки формирует (генерирует) маршрут парковки для перемещения транспортного средства V1 к цели p3 парковки на основе текущего положения (например, исходного положения p1) транспортного средства V1, положения p2 разворота и цели p3 парковки. Маршрут парковки – это маршрут, по которому транспортное средство V1 может двигаться к цели p3 парковки, не сталкиваясь с препятствием.
[0033] Блок 32 управления отслеживанием маршрута парковки генерирует целевой угол поворота руля, необходимый для перемещения транспортного средства V1 к цели p3 парковки, на основе маршрута парковки и текущего положения транспортного средства V1.
[0034] Блок 33 управления углом поворота руля генерирует сигнал управления углом поворота руля для осуществления управления углом поворота руля в соответствии с целевым углом поворота руля.
[0035] Блок 34 генерации целевой скорости генерирует целевую скорость для перемещения транспортного средства V1 на основе маршрута парковки и текущего положения транспортного средства V1.
[0036] Блок 35 управления скоростью генерирует сигнал управления скоростью для осуществления управления скоростью транспортного средства V1 до целевой скорости.
[0037] Блок 32 управления отслеживанием маршрута парковки, блок 33 управления углом поворота руля, блок 34 генерации целевой скорости и блок 35 управления скоростью, которые пояснены выше, могут генерировать сигнал управления углом поворота руля и сигнал управления скоростью, например, на основе метода счисления пути. Метод счисления пути – это метод оценки положения и ориентации транспортного средства на основе взаимосвязи между пройденным расстоянием в центре осей задних колес и углом поворота переднего колеса, при очень низкой скорости и в транспортном средстве с рулевым управлением передними колесами, и является методом, полезным при движении в ограниченной зоне, таком как операция парковки и т. д.
[0038] ЭБУ 40 транспортного средства управляет движением исполнительного механизма 50, выполненного с возможностью управления вождением, торможением и рулевым управлением транспортного средства V1, на основе сигнала управления углом поворота руля и сигнала управления скоростью. Если угол поворота руля и скорость регулируются так, что транспортное средство V1 движется по маршруту парковки, сгенерированному блоком 31 формирования маршрута парковки, транспортное средство V1 может быть припарковано так, чтобы конкретное положение в транспортном средстве V1 совпадало с целью P3 парковки.
[0039] Фиг.4 – схематичный рисунок, показывающий маршрут движения при заезде транспортного средства V1 в свободное парковочное место путем парковки передом. На фиг.4 положение на транспортном средстве V1, которое должно совпадать с целью p3 парковки, установлено, например, на конец переднего колеса (передний конец переднего колеса) транспортного средства V1. Соответственно, управление парковкой выполняется таким образом, чтобы положение переднего колеса транспортного средства V1 совпадало на прямой линии L, соединяющей между собой конец первой линии W1 разметки дальней стороны в направлении, в котором заезжает транспортное средство V1, и конец второй линии разметки (образующей пару с первой линией разметки) дальней стороны в направлении, в котором заезжает транспортное средство V1. Кроме того, то положение на транспортном средстве V1, которое должно совпадать с целью p3 парковки, может быть любым положением переднего колеса транспортного средства V1 и может быть установлено на задний конец, центр колеса или заданное положение от центра колеса.
[0040] Таким образом, положение на транспортном средстве V1, которое должно совпадать с целью p3 парковки, изменяется между парковкой задом и парковкой передом (в зависимости от способа парковки). Кроме того, также изменяется положение прямой линии L, соединяющей между собой первую линию W1 разметки и вторую линию W2 разметки, на которой установлена цель p3 парковки. Конкретные примеры этого будут указаны ниже.
[0041] Далее будет объяснена работа устройства 100 управления парковкой согласно настоящему варианту осуществления, выполненного так, как упомянуто выше, со ссылкой на блок–схему последовательности операций, показанную на фиг.5, и на фиг.3.
[0042] Транспортное средство V1, движущееся с низкой скоростью или останавливающееся в исходном положении p1 на парковочном пространстве X1, ищет свободное парковочное место (этап S1). Когда датчик 10 обнаружения целевой парковочной разметки транспортного средства V1 обнаруживает свободное парковочное место (ДА на этапе S2), блок 20 обработки информации изображений определяет способ парковки и положение целевой парковочной разметки (этап S3).
[0043] Блок 20 обработки информации изображений может автоматически определять способ парковки и положение целевой парковочной разметки или может определять их на основе операции, введенной из интерфейса 51 ввода.
[0044] Блок 30 расчета помощи парковке генерирует маршрут парковки для перемещения транспортного средства V1 к цели p3 парковки на основе исходного положения p1, положения p2 разворота и цели p3 парковки, сгенерированных блоком 20 обработки информации изображений (этап S4). Затем начинается управление парковкой (этап S5).
[0045] Блок 30 расчета помощи парковке изменяет сигнал управления углом поворота руля и сигнал управления скоростью так, что положение транспортного средства V1 достигает положения p2 разворота (НЕТ на этапе S6).
[0046] Когда положение транспортного средства V1 достигает положения p2 разворота (ДА на этапе S6), ЭБУ 40 транспортного средства переключает положение переключения передач в режим R (этап S7).
[0047] Когда положение переключения передач переключено в режим R, устройство 100 управления парковкой повторно обнаруживает первую линию W1 разметки и вторую линию W2 разметки, которые обнаруживаются, и переустанавливает цель p3 парковки (этап S9).
[0048] Затем устройство 100 управления парковкой регулирует каждый из сигнала управления углом поворота руля и сигнала управления скоростью так, чтобы положение на транспортном средстве V1 совпало с целью p3 парковки (этап S10). Процессы этапов S9–S10 повторяются до тех пор, пока положение на транспортном средстве V1 не достигнет цели p3 парковки (НЕТ на этапе S11).
[0049] Процессы этапов S9–S10 выполняются в блоке частоты смены кадров, при которой датчик 10 обнаружения целевой парковочной разметки захватывает, например, одно изображение. То есть сигнал управления углом поворота руля и сигнал управления скоростью для направления транспортного средства V1 к цели p3 парковки устанавливаются в реальном времени.
[0050] Когда положение на транспортном средстве V1 достигает цели p3 парковки в соответствии с сигналом управления углом поворота руля и сигналом управления скоростью, которые регулируются в реальном времени (ДА на этапе S11), положение переключения передач переключается в режим P и управление помощью при парковке завершается (этап S12).
[0051] Далее будет объяснено управление в реальном времени для уменьшения разницы между маршрутом парковки и маршрутом движения транспортного средства V1. В качестве фактора разницы между маршрутом парковки и маршрутом движения существуют четыре фактора: «A: расстояние свободного хода, когда транспортное средство останавливается», «B: последующая задержка угла поворота руля», «C: установившееся отклонение угла поворота руля»; и «D: ошибка обнаружения датчика 10 обнаружения целевой парковочной разметки». Далее будет подробно объяснен способ уменьшения каждого влияния.
«A: расстояние свободного хода, когда транспортное средство остановлено»
[0052] На фиг.6 показаны изменения сигнала управления скоростью в зависимости от положения движения для того, чтобы транспортное средство V1 двигалось по маршруту парковки. На фиг.6А горизонтальная ось представляет положение транспортного средства V1, а вертикальная ось – целевую скорость q1 (сплошная линия) и фактическую скорость q2 (пунктирная линия) транспортного средства V1. Ссылочное обозначение p1, показанное на горизонтальной оси, соответствует исходному положению p1, показанному на фиг.3, ссылочное обозначение p2 – положению p2 разворота, а ссылочное обозначение p3 – цели p3 парковки.
[0053] В качестве целевой скорости q1 задается целевая скорость в направлении вперед на маршруте от исходного положения p1 до положения p2 разворота (x0 на фиг. 3). Кроме того, задается целевая скорость в направлении назад на маршруте от положения p2 разворота к цели p3 парковки (x1 на фиг. 3). Целевая скорость q1 имеет шаблон, по которому целевая скорость изменяется в состоянии линейного изменения в соответствии с положением транспортного средства V1.
[0054] Как показано на фиг.6А, при движении из исходного положения р1 в положение р2 разворота фактическая скорость q2 изменяется, следуя за целевой скоростью q1. Однако при остановке в положении p2 разворота может оказаться невозможным соблюсти целевую скорость q1, и тогда транспортное средство V1 будет свободно двигаться. То есть, поскольку фактическая скорость q2 не равна нулю, но выполняется свободный ход, когда транспортное средство V1 достигает положения p2 разворота, фактическая скорость q2 становится нулевой в положении p21, которое проходит на расстоянии свободного хода («L1»). Расстояние свободного хода L1 может быть рассчитано на основе обнаруженной информации от датчика 53 угла поворота руля.
[0055] Если транспортное средство V1 выполняет свободный ход, то транспортное средство V1 останавливается в положении p21, которое проходит положение p2 разворота. Следовательно, если транспортное средство V1 перемещается назад без корректировки этого расстояния свободного хода L1, транспортное средство V1 первоначально должно перемещаться назад по маршруту x1 парковки, чтобы достичь цели p3 парковки, но транспортное средство V1 перемещается назад по маршруту x2, отличному от маршрута x1 парковки. Следовательно, транспортное средство V1 достигает положения p31, отличного от цели p3 парковки.
[0056] Соответственно, целевую скорость q1 при перемещении транспортного средства V1 назад корректируют на основе расстояния свободного хода L1 и тем самым устанавливают скорректированную целевую скорость q1a, как показано на фиг. 6B. Скорректированную заданную скорость q1a устанавливают так, чтобы расстояние во время движения назад становилось большим только на расстояние свободного хода L1. Отклонение между маршрутом парковки и маршрутом движения, сгенерированным из–за расстояния свободного хода L1, может быть исправлено путем установки скорректированной целевой скорости q1a, и тем самым транспортное средство V1 может быть доведено до цели p3 парковки. Ссылочное обозначение q2a, показанное на фиг.6B, является фактической скоростью q2a в зависимости от скорректированной целевой скорости q1a.
[0057] Фиг.7 – схематичный рисунок, показывающий вышеприведенное объяснение в виде на плоскости. Даже если расстояние свободного хода L1 при останавливании транспортного средства V1 возникает, поскольку движение назад транспортного средства V1 регулируется основным управляющим сигналом после того, как транспортное средство V1 перемещается назад на то же расстояние, что и расстояние свободного хода L1 (т.е. после возврата из положения p21 в положение p2 разворота), транспортное средство V1 может быть припарковано в положении цели p3 парковки. Кроме того, угол поворота руля, когда транспортное средство V1 возвращается из положения p21 в положение p2 разворота, задается таким же, как и угол поворота руля во время свободного хода.
«B: последующая задержка угла поворота руля»
[0058] Далее будет объяснено управление углом поворота руля транспортного средства V1. Фиг. 8А показывает график, показывающий изменения угла поворота руля в зависимости от положения транспортного средства V1, причем изогнутая линия q11 указывает целевой угол поворота руля для того, чтобы транспортное средство двигалось по маршруту парковки, а изогнутая линия q12 указывает фактический угол поворота руля. Изогнутая линия q11, обозначающая целевой угол поворота руля, представляет собой схему поворота на основе клотоиды, и наклон величины изменения угла поворота руля задается равным некому значению с учетом предела срабатывания привода руля. Затем целевой угол q11 поворота руля устанавливается при управлении углом поворота руля транспортного средства V1, и поэтому оно будет следовать с определенной величиной задержки в соответствии с динамикой на основе угла поворота руля. То есть фактический угол q12 поворота руля устанавливается в положении, слегка отклоненном по отношению к целевому углу q11 поворота руля.
[0059] Следовательно, как показано на фиг.9, при движении из исходного положения p1 в положение p2 разворота регулировка угла поворота руля задерживается, а радиус кривизны маршрута движения увеличивается. В частности, поскольку оно будет перемещаться по маршруту x3 и остановится в положении p22, положение p22 будет положением, отклоненным от положения p2 разворота только на расстояние L2. Затем, когда транспортное средство V1 перемещается назад из этого положения p22, транспортное средство V1 будет перемещаться назад по маршруту x4 и будет останавливаться в положении p32. То есть транспортное средство V1 не может быть остановлено на цели p3 парковки.
[0060] В настоящем варианте осуществления, как показано на фиг. 8B, с учетом такой последующей задержки угла поворота руля, момент времени регулировки угла поворота руля предварительно устанавливают немного более ранним. Другими словами, скорректированный целевой угол q13 поворота руля устанавливают так, что угол поворота руля изменяется на более близкое положение относительно целевого угла q11 поворота руля. Тогда фактический угол поворота руля, который по существу должен соответствовать фактическому углу q11 поворота руля, может быть получен путем управления движением транспортного средства V1 с использованием этого скорректированного целевого угла q13 поворота руля. Соответственно, транспортное средство V1 может быть доведено до положения p2 разворота по целевому маршруту x0, показанного на фиг.9, и далее транспортное средство V1 может быть перемещено к цели p3 парковки по маршруту x1 парковки.
«C: установившееся отклонение угла поворота руля»
[0061] При управлении углом поворота руля транспортного средства V1 может создаваться отклонение между целевым углом поворота руля и фактическим углом поворота руля из-за установившегося отклонения угла поворота руля в дополнение к вышеупомянутой последующей задержке. Далее такое отклонение будет объяснено со ссылкой на фиг. 10. На фиг.10А приведен график, показывающий изменения целевого угла q21 поворота руля в зависимости от положения транспортного средства V1, а также изменения фактического угла q22 поворота руля при возникновении установившегося отклонения. На фиг.10 последующая задержка угла поворота руля не учитывается.
[0062] Как показано ссылочным обозначением y1, при возникновении установившегося отклонения фактический угол q22 поворота руля увеличивается относительно целевого угла q21 поворота руля. Соответственно, когда транспортное средство V1 перемещается назад из положения р2 разворота, транспортное средство V1 не может перемещаться назад по маршруту x1 парковки.
[0063] В настоящем варианте осуществления в том положении, где возникает установившееся отклонение, целевой угол q21 поворота руля корректируют с учетом установившегося отклонения и устанавливают скорректированный целевой угол q32 поворота руля, показанный на фиг. 10B. Устанавливая таким образом, даже при возникновении установившегося отклонения целевой угол поворота руля корректируют в предположении вызванной им величины отклонения угла поворота руля. Соответственно, может быть получен фактический угол поворота руля, который будет практически совпадающим с целевым углом поворота руля. Соответственно, транспортное средство V1 может перемещаться по маршрутам x0 и x1 парковки с высокой точностью, а значит, транспортное средство V1 может быть припарковано на цели p3 парковки.
«D: Ошибка обнаружения датчика 10 обнаружения целевой парковочной разметки»
[0064] Датчик 10 обнаружения целевой парковочной разметки обнаруживает свободное парковочное место, блок 22 установки целевого положения парковки устанавливает цель парковки, а блок 31 формирования маршрута парковки генерирует маршрут к установленной цели парковки. Во время установки цели парковки положение цели парковки может быть обнаружена ошибочно, когда существует расстояние между целью парковки и транспортным средством V1, когда окружающая среда на стоянке неправильная (например, дождь, ночь), когда свободное парковочное место окружено припаркованными транспортными средствами или препятствиями (например, столбами, стенами стоянки), или т.п. Следовательно, в процессе парковки в направлении цели парковки может быть обнаружена новая цель парковки. В этом случае транспортное средство может быть припарковано так, чтобы быть близко к истинной цели парковки, путем установки целевого маршрута парковки до обнаруженной новой цели парковки и корректировки содержания управления в режиме реального времени.
[Объяснение операции обработки]
[0065] Далее будет объяснена процедура обработки устройства 100 управления парковкой согласно настоящему варианту осуществления со ссылкой на блок–схему последовательности операций, показанную на фиг. 11. Этот процесс выполняется для каждого периода работы, который был предварительно установлен.
[0066] Сначала на этапе S20 блок 20 обработки информации изображений получает парковочное пространство X1 на основе информации, обнаруженной датчиком 10 обнаружения целевой парковочной разметки. В частности, как показано на фиг.3, получают парковочное пространство X1, которое является зоной, где транспортное средство V1 может перемещаться.
[0067] На этапе S21 блок 31 формирования маршрута парковки устанавливает положение p2 разворота для парковки транспортного средства и цель p3 парковки в диапазоне, который не отклоняется от парковочного пространства X1. Кроме того, блок 31 формирования маршрута парковки устанавливает маршрут движения до тех пор, пока транспортное средство V1 в исходном положении p1 не достигнет целевого положения p3 парковки через положение p2 разворота в зоне парковочного пространства X1. Следовательно, устанавливают маршруты x0 и x1 парковки, показанные на фиг.3.
[0068] На этапе S22 блок 32 управления отслеживанием маршрута парковки вычисляет величину коррекции целевого угла поворота руля так, чтобы транспортное средство V1 двигалось по маршрутам x0 и x1 парковки, показанным на фиг.3. Поскольку эта величина коррекции может быть рассчитана на основе маршрутов x0 и x1 парковки, она может быть установлена в тот момент времени, когда транспортное средство V1 начинает движение вперед из исходного положения p1. Следовательно, устанавливают скорректированный целевой угол q13 поворота руля, показанный на фиг. 8B, или скорректированный целевой угол q31 поворота руля, показанный на фиг. 10B. Например, если возникает последующая задержка фактического угла поворота руля относительно целевого угла поворота руля, устанавливают скорректированный целевой угол q13 поворота руля, или если возникает отклонение из–за установившегося отклонения фактического угла поворота руля, устанавливают скорректированный целевой угол q31 поворота руля. Кроме того, если возникает отклонение из–за влияния обоих факторов, устанавливают скорректированный целевой угол поворота руля для коррекции обоих величин отклонения.
[0069] На этапе S23 выводят скорость транспортного средства из блока 35 управления скоростью, выводят команду управления углом поворота руля из блока 33 управления углом поворота руля и начинают операцию автономной парковки транспортного средства V1 под управлением ЭБУ 40 транспортного средства. Соответственно, транспортное средство V1 начинает движение вперед по маршруту x0 парковки из исходного положения p1, показанного на фиг. 3.
[0070] На этапе S24 блок 24 оценки текущего положения оценивает положение транспортного средства V1 на основе изображения его окружения, захваченного датчиком 10 обнаружения целевой парковочной разметки. Кроме того, для оценки положения транспортного средства V1 могут использоваться информация о скорости транспортного средства и информация об угле поворота руля, соответственно обнаруженные датчиком 52 частоты вращения колеса и датчиком 53 угла поворота руля.
[0071] На этапе S25 блок 32 управления отслеживанием маршрута парковки вычисляет величину отклонения путем сравнения маршрута x0 парковки с собственным положением, оцененным блоком 24 оценки текущего положения. Например, когда транспортное средство должно остановиться в положении p2 разворота, транспортное средство не всегда надежно останавливается в этом положении p2 разворота и может перемещаться в такое положение, где транспортное средство V1 превышает положение p2 разворота вследствие свободного хода. В этом случае блок 32 управления отслеживанием маршрута парковки вычисляет величину отклонения между ними. В частности, вычисляется расстояние свободного хода L1, показанное на фиг.7.
[0072] На этапе S26 блок 32 управления отслеживанием маршрута парковки и блок 34 генерации целевой скорости определяют, необходима ли коррекция или нет. Например, когда величина отклонения меньше, чем пороговое значение, которое было установлено ранее, можно определить, что без корректировки величины отклонения нет никакой проблемы. Соответственно, когда величина отклонения больше порогового значения, определяют, что коррекция необходима. Когда определено, что в выполнении коррекции нет необходимости, процесс переходит на этап S29 (НЕТ на этапе S26).
[0073] Когда определено, что необходимость в коррекции есть (ДА на этапе S26), блок 32 управления отслеживанием маршрута парковки и блок 34 генерации целевой скорости вычисляют величину коррекции на этапе S27. В этом процессе в качестве величины коррекции используют величину коррекции угла поворота руля, установленную процессом на этапе S22, и расстояние свободного хода L1 (значение отклонения), рассчитанное процессом на этапе S25. Кроме того, корректирующая величина угла поворота руля и корректирующая величина в соответствии с расстоянием свободного хода L1 могут быть установлены в режиме реального времени.
[0074] На этапе S28 блок 33 управления углом поворота руля и блок 35 управления скоростью генерируют сигнал управления скоростью, по которому корректируется работа транспортного средства V1 на основе вычисленной корректирующей величины, для вывода в ЭБУ 40 транспортного средства. Например, как показано на фиг. 7, когда транспортное средство V1 останавливается в положении p21, отклоненном на расстояние свободного хода L1, сигнал управления транспортного средства V1 корректируется так, что оно перемещается на такое же обратное расстояние, что и это расстояние свободного хода L1. Соответственно, после того, как транспортное средство V1 переместится из положения p21 в положение p2 разворота, будет реализовано основное управление парковкой задом. Кроме того, целевой угол поворота руля корректируется на основе корректирующей величины угла поворота руля.
[0075] На этапе S29 осуществляют управление направлением транспортного средства посредством ЭБУ 40 транспортного средства. Следовательно, транспортное средство V1 движется по маршрутам x0 и x1 парковки и может быть надежно остановлено на цели p3 парковки.
[0076] Таким образом, так как в устройстве 100 управления парковкой согласно настоящему варианту осуществления вычисляется величина отклонения текущего положения транспортного средства и положения на целевом маршруте, а целевая скорость и целевой угол поворота руля корректируются таким образом, чтобы величина отклонения уменьшается, транспортное средство V1 может быть припарковано так, чтобы положение на транспортном средстве V1 совпадало с целью p3 парковки с высокой точностью.
[Конкретный пример цели p3 парковки]
[0077] Способ помощи при парковке согласно настоящему варианту осуществления обнаруживает первую линию W1 разметки свободного парковочного места в направлении, ортогональном направлению по ширине транспортного средства, и вторую линию W2 разметки, которая образует пару с первой линией W1 разметки, и устанавливает цель p3 парковки на прямой линии, соединяющей между собой точку на первой линии W1 разметки и точку на второй линии W2 разметки. Положение цели p3 парковки изменяется в соответствии с длинами первой и второй линий W1 и W2 разметки и т.п. Далее будет объяснен конкретный пример.
[0078] Фиг. 12 – подробная блок–схема процесса установки цели p3 парковки (фиг. 5: этап S9). Когда начинают управление парковкой (этап S90), устройство 100 управления парковкой ищет первую линию W1 разметки и вторую линию W2 разметки свободного парковочного места. Если никакие первая и вторая линии W1 и W2 разметки не могут быть обнаружены, управление помощью при парковке с использованием линий разметки останавливается. В этом случае выполняется обычное общее управление парковкой.
[0079] Когда первая линия W1 разметки и вторая линия W2 разметки свободного парковочного места могут быть обнаружены (ДА на этапе S90), определяют, близок ли угол между прямой линией, соединяющей между собой конец первой линии W1 разметки и конец второй линии W2 разметки, и первой линией W1 разметки или второй линией W2 разметки к прямому углу (этап S91).
[0080] Когда угол между этой прямой линией и первой линией W1 разметки или второй линией W2 разметки близок к прямому углу (ДА на этапе S91), далее определяют, являются ли длины первой и второй линий W1 и W2 разметки большими, чем общая длина транспортного средства V1 (рассматриваемого транспортного средства) (этап S92).
(Длина линии разметки > Длина транспортного средства)
[0081] Фиг.13 – вид сверху, показывающий парковочное место и транспортное средство V1, когда длины первой и второй линий W1 и W2 разметки больше, чем общая длина транспортного средства V1 (рассматриваемого транспортного средства) (ДА на этапе S92). В этом случае цель p3 парковки устанавливается на прямой линии L, которая соединяет между собой конец ближней стороны первой линии W1 разметки в направлении, в котором въезжает рассматриваемое транспортное средство, и конец ближней стороны второй линии W2 разметки в направлении, в котором въезжает рассматриваемое транспортное средство.
[0082] На фиг.13А показан случай парковки задом. В этом случае цель p3 парковки устанавливается на прямой линии L, соединяющей между собой концы первой и второй линий W1 и W2 разметки ближней стороны, в которую въезжает рассматриваемое транспортное средство, и управление парковкой выполняется так, чтобы конец (передний край) стороны, противоположной направлению движения рассматриваемого транспортного средства, совпадал с целью p3 парковки (этап S94).
[0083] На фиг. 13B показан случай парковки передом. Также и в этом случае цель p3 парковки устанавливается на прямой линии L, соединяющей между собой концы первой и второй линий W1 и W2 разметки ближней стороны, в которую въезжает рассматриваемое транспортное средство. Затем выполняется управление парковкой так, чтобы конец (задний край) стороны, противоположной направлению движения рассматриваемого транспортного средства, совпадал с целью p3 парковки (этап S94).
[0084] Следовательно, транспортное средство V1 не выступает за прямую линию L, соединяющую между собой концы первой линии W1 разметки и второй линии W2 разметки ближней стороны, в которую въезжает рассматриваемое транспортное средство, также в обоих случаях парковки задом и парковки передом. То есть транспортное средство V1 может быть припарковано в пределах линии разметки.
(Длина линии разметки < Колесная база (1))
[0085] Когда длины первой и второй линий W1 и W2 разметки меньше, чем общая длина транспортного средства V1 (рассматриваемого транспортного средства) (НЕТ на этапе S92), далее определяют, являются ли длины первой и второй линий W1 и W2 разметки большими, чем колесная база транспортного средства V1 (этап S95).
[0086] Когда длины первой и второй линий W1 и W2 разметки меньше, чем колесная база транспортного средства V1 (ДА на этапе S95), далее определяют, являются ли длины первой и второй линий W1 и W2 разметки равными или большими, чем заданная длина (этап S96).
[0087] Например, заданная длина составляет приблизительно 50 см. Когда первая и вторая линии W1 и W2 разметки составляют в длину, например, 50 см или более и являются более короткими, чем колесная база (ДА на этапе S96), линии разметки представляют лишь поперечное направление транспортного средства V1 на парковочном месте и во многих случаях рисуются на центральной части в направлении по глубине парковочного места.
[0088] Фиг.14 – вид сверху, показывающий парковочное место и транспортное средство V1, когда длины первой и второй линий W1 и W2 разметки меньше, чем колесная база транспортного средства V1 (рассматриваемого транспортного средства) (ДА на этапе S95). В этом случае цель p3 парковки устанавливается на прямой линии L, которая соединяет между собой центр первой линии W1 разметки и центр второй линии разметки (этап S97).
[0089] На фиг.14А показан случай парковки задом, и цель p3 парковки установлена на прямой линии L, которая в этом случае соединяет между собой соответствующие центры первой линии W1 разметки и второй линии W2 разметки. Кроме того, управление парковкой выполняется так, что цель p3 парковки и положение центра рассматриваемого транспортного средства совпадают друг с другом (этап S98). В этом случае передняя часть транспортного средства V1 расположена с ближней стороны в направлении, в котором заезжает рассматриваемое транспортное средство.
[0090] На фиг. 14B показан случай парковки передом. Также и в этом случае цель p3 парковки устанавливается на прямой линии L, которая соединяет между собой соответствующие центры первой линии W1 разметки и второй линии W2 разметки. Кроме того, управление парковкой выполняется так, что положение цели p3 парковки и положение центра рассматриваемого транспортного средства совпадают друг с другом (этап S98). В этом случае задняя часть транспортного средства V1 расположена с ближней стороны в направлении, в котором заезжает рассматриваемое транспортное средство.
[0091] Следовательно, длина транспортного средства V1, выступающего от первой линии W1 разметки и второй линии W2 разметки, является одинаковой между передней стороной и задней стороной. Соответственно, транспортное средство V1 может быть припарковано в хорошо сбалансированном положении относительно первой и второй линий W1 и W2 разметки.
(Длина линии разметки < колесная база (2))
[0092] Когда длины первой и второй линий W1 и W2 разметки меньше, чем общая длина транспортного средства V1 (рассматриваемого транспортного средства) (НЕТ на этапе S92), далее определяют, являются ли длины первой и второй линий W1 и W2 разметки большими, чем колесная база транспортного средства V1 (этап S95).
[0093] Когда длины первой и второй линий W1 и W2 разметки меньше, чем колесная база транспортного средства V1 (ДА на этапе S95), далее определяют, являются ли длины первой и второй линий W1 и W2 разметки равными или большими, чем заданная длина (этап S96).
[0094] Например, заданная длина составляет приблизительно 50 см. Когда первая и вторая линии W1 и W2 разметки составляют в длину, например, 50 см или более и более короткие, чем колесная база (ДА на этапе S96), линии разметки могут представлять лишь поперечное направление транспортного средства V1 в парковочном месте.
[0095] В этом случае цель p3 парковки устанавливается на прямой линии L, которая соединяет между собой конец первой линии W1 разметки и конец второй линии разметки (этап S97).
[0096] Кроме того, когда длины первой и второй линий W1 и W2 разметки меньше, чем колесная база транспортного средства V1, управление парковкой выполняется так, чтобы положение колеса рассматриваемого транспортного средства совпадало с целью p3 парковки, установленной на прямой линии L, соединяющей между собой конец первой линии W1 разметки и конец второй линии разметки.
[0097] Таким образом, выступание от первой линии W1 разметки и второй линии W2 разметки транспортного средства V1 может различаться между передней стороной и задней стороной, при этом можно подавить сильное выступание с любой из передней стороны или задней стороны.
[0098] Кроме того, когда длины первой и второй линий W1 и W2 разметки меньше, чем колесная база транспортного средства V1, определяют направление парковки рассматриваемого транспортного средства относительно свободного парковочного места, и если направление парковки рассматриваемого транспортного средства – это парковка задом, то управление парковкой выполняется так, чтобы положение заднего колеса рассматриваемого транспортного средства совпадало с целью p3 парковки. В этом случае передняя часть транспортного средства V1 расположена с ближней стороны в направлении, в котором заезжает рассматриваемое транспортное средство.
[0099] Таким образом, когда длины первой и второй линий W1 и W2 разметки меньше, чем колесная база транспортного средства V1, поскольку управление выполняется так, что положение заднего колеса рассматриваемого транспортного средства совпадает с целью p3 парковки, выступание от первой линии W1 разметки и второй линии W2 разметки транспортного средства V1 может различаться между передней стороной и задней стороной, при этом можно подавить сильное выступание с любой из передней или задней стороны.
[0100] Кроме того, когда длины первой и второй линий W1 и W2 разметки меньше, чем колесная база транспортного средства V1, определяют направление парковки рассматриваемого транспортного средства относительно свободного парковочного места, и если направление парковки рассматриваемого транспортного средства – это парковка задом, то управление парковкой может быть выполнено так, чтобы положение заднего колеса рассматриваемого транспортного средства совпадало с целью p3 парковки. Таким образом, при парковке задом транспортное средство V1 может быть припарковано в хорошо сбалансированном положении по отношению к первой и второй линиям W1 и W2 разметки.
[0101] Кроме того, когда длины первой и второй линий W1 и W2 разметки меньше, чем колесная база транспортного средства V1, определяют направление парковки рассматриваемого транспортного средства относительно свободного парковочного места, и если направление парковки рассматриваемого транспортного средства – это парковка передом, то управление парковкой выполняется таким образом, чтобы положение переднего колеса рассматриваемого транспортного средства совпадало с целью p3 парковки. В этом случае задняя часть транспортного средства V1 расположена с ближней стороны в направлении, в котором заезжает рассматриваемое транспортное средство. В этом случае задняя часть транспортного средства V1 расположена с ближней стороны в направлении, в котором заезжает рассматриваемое транспортное средство.
[0102] Таким образом, когда длины первой и второй линий W1 и W2 разметки меньше, чем колесная база транспортного средства V1, поскольку управление выполняется так, что положение переднего колеса рассматриваемого транспортного средства совпадает с целью p3 парковки, выступание от первой линии W1 разметки и второй линии W2 разметки транспортного средства V1 может различаться между передней стороной и задней стороной, при этом можно подавить сильное выступание с любой из передней или задней стороны.
[0103] Кроме того, когда длины первой и второй линий W1 и W2 разметки меньше, чем колесная база транспортного средства V1, определяют направление парковки рассматриваемого транспортного средства относительно свободного парковочного места, и если направление парковки рассматриваемого транспортного средства – это парковка передом, то управление парковкой может быть выполнено так, чтобы положение переднего колеса рассматриваемого транспортного средства совпадало с целью p3 парковки. Таким образом, при парковке передом транспортное средство V1 может быть припарковано в хорошо сбалансированном положении по отношению к первой и второй линиям W1 и W2 разметки.
[0104] (Колесная база < Длина линии разметки < Длина транспортного средства)
[0105] Фиг. 15 – вид сверху, показывающий парковочное место и транспортное средство V1, когда длины первой и второй линий W1 и W2 разметки больше, чем колесная база транспортного средства V1 (рассматриваемого транспортного средства), и меньше, чем общая длина транспортного средства V1 (НЕТ на этапе S95). В этом случае цель p3 парковки устанавливается на прямой линии L, которая соединяет между собой конец дальней стороны первой линии W1 разметки в направлении, в котором въезжает рассматриваемое транспортное средство, и конец дальней стороны второй линии разметки в направлении, в котором въезжает рассматриваемое транспортное средство (этап S99).
[0106] На фиг. 15А показан случай парковки задом. В этом случае цель p3 парковки устанавливается на прямой линии L, соединяющей между собой концы дальней стороны в направлении, в котором въезжает рассматриваемое транспортное средство, и управление парковкой выполняется так, чтобы положение колеса в направлении движения рассматриваемого транспортного средства совпадало с целью p3 парковки (первая половина этапа S100). В этом случае управление парковкой выполняется так, чтобы положение заднего колеса дальней стороны в направлении, в котором заезжает рассматриваемое транспортное средство, совпадало с целью p3 парковки (этап S100).
[0107] На фиг. 15B показан случай парковки передом. Также и в этом случае цель p3 парковки устанавливается на прямой линии L, соединяющей между собой концы дальней стороны в направлении, в котором въезжает рассматриваемое транспортное средство. Тогда управление парковкой выполняется так, чтобы положение переднего колеса дальней стороны в направлении, в котором заезжает рассматриваемое транспортное средство, совпадало с целью p3 парковки (этап S100).
[0108] Таким образом, транспортное средство V1 припарковано так, что конец шины совпадает с концами первой линии W1 разметки и второй линии W2 разметки дальней стороны в направлении, в котором въезжает рассматриваемое транспортное средство. Соответственно, даже когда дальняя сторона линии разметки имеет ступенчатую высоту или выемку, транспортное средство V1 может быть припарковано на ближайшей стороне от нее.
[0109] Кроме того, может быть подходящим образом установлена величина (длина) выступания из парковочного места транспортного средства V1. Соответственно, транспортное средство V1 может быть припарковано в подходящем положении парковочного места.
(Длина линии разметки < Длина транспортного средства)
[0110] Определяют, являются ли длины первой и второй линий W1 и W2 разметки меньшими, чем общая длина транспортного средства V1 (рассматриваемого транспортного средства).
[0111] Когда длины первой и второй линий W1 и W2 разметки меньше, чем общая длина транспортного средства V1, цель p3 парковки устанавливается на прямой линии L, соединяющей между собой конец первой линии W1 разметки и конец второй линии разметки (этап S97).
[0112] Когда длины первой и второй линий W1 и W2 разметки меньше, чем общая длина транспортного средства V1, управление парковкой выполняется так, чтобы положение колеса рассматриваемого транспортного средства совпадало с целью p3 парковки, установленной на прямой линии L, соединяющей между собой конец первой линии W1 разметки и конец второй линии разметки.
[0113] Следовательно, это позволяет подавлять то, что рассматриваемое транспортное средство сильно выступает с любой из передней стороны и задней стороны вследствие выступания с передней или задней стороны.
[0114] Кроме того, когда длины первой и второй линий W1 и W2 разметки меньше, чем общая длина транспортного средства V1, определяют направление парковки рассматриваемого транспортного средства относительно свободного парковочного места, и если направление парковки рассматриваемого транспортного средства – это парковка задом, то управление парковкой выполняется так, чтобы положение заднего колеса рассматриваемого транспортного средства совпадало с целью p3 парковки. В этом случае передняя часть транспортного средства V1 расположена с ближней стороны в направлении, в котором заезжает рассматриваемое транспортное средство.
[0115] Таким образом, когда длины первой и второй линий W1 и W2 разметки меньше, чем общая длина транспортного средства V1, поскольку управление выполняется так, что положение заднего колеса рассматриваемого транспортного средства совпадает с целью p3 парковки, выступание от первой линии W1 разметки и второй линии W2 разметки транспортного средства V1 может различаться между передней стороной и задней стороной, при этом можно подавить сильное выступание с любой из передней или задней стороны.
[0116] Кроме того, когда длины первой и второй линий W1 и W2 разметки меньше, чем общая длина транспортного средства V1, определяют направление парковки рассматриваемого транспортного средства относительно свободного парковочного места, и если направление парковки рассматриваемого транспортного средства – парковка задом, управление парковкой может быть выполнено так, чтобы положение заднего колеса рассматриваемого транспортного средства совпадало с целью p3 парковки. Таким образом, при парковке задом транспортное средство V1 может быть припарковано в хорошо сбалансированном положении по отношению к первой и второй линиям W1 и W2 разметки.
[0117] Более того, когда длины первой и второй линий W1 и W2 разметки меньше, чем общая длина транспортного средства V1, определяют направление парковки рассматриваемого транспортного средства относительно свободного парковочного места, и если направление парковки рассматриваемого транспортного средства – это парковка передом, управление парковкой выполняется так, чтобы положение переднего колеса рассматриваемого транспортного средства совпадало с целью p3 парковки. В этом случае задняя часть транспортного средства V1 расположена с ближней стороны в направлении, в котором заезжает рассматриваемое транспортное средство.
[0118] Таким образом, когда длины первой и второй линий W1 и W2 разметки меньше, чем общая длина транспортного средства V1, поскольку управление выполняется так, что положение переднего колеса рассматриваемого транспортного средства совпадает с целью p3 парковки, выступание от первой линии W1 разметки и второй линии W2 разметки транспортного средства V1 может различаться между передней стороной и задней стороной, при этом можно подавить сильное выступание с любой из передней или задней стороны.
[0119] Более того, когда длины первой и второй линий W1 и W2 разметки меньше, чем общая длина транспортного средства V1, определяют направление парковки рассматриваемого транспортного средства относительно свободного парковочного места, и если направление парковки рассматриваемого транспортного средства – это парковка передом, управление парковкой может быть выполнено так, чтобы положение переднего колеса рассматриваемого транспортного средства совпадало с целью p3 парковки. Таким образом, при парковке передом транспортное средство V1 может быть припарковано в хорошо сбалансированном положении по отношению к первой и второй линиям W1 и W2 разметки.
(Только конец линии разметки)
[0120] Линия разметка для указания парковочного места с течением времени становится тоньше и, наконец, исчезает. В ходе этого процесса может остаться только конец линии разметки. Далее будет объяснена цель p3 парковки в таком случае.
[0121] В этом случае линия разметки короче, чем колесная база (ДА на этапе S95), а длина линии разметки соответствует равной или меньшей, чем заданная длина (НЕТ на этапе S96).
[0122] Фиг.16 – вид сверху, показывающий транспортное средство V1 и парковочное место, в котором остается только конец первой и второй линий W1 и W2 разметки на противоположной стороне в направлении, в котором заезжает транспортное средство V1. В этом случае цель p3 парковки устанавливается на прямой линии L, соединяющей между собой конец дальней стороны первой линии W1 разметки в направлении, в котором въезжает рассматриваемое транспортное средство, и конец дальней стороны второй линии разметки в направлении, в котором въезжает рассматриваемое транспортное средство (этап S99).
[0123] То есть, когда конец первой линии W1 разметки дальней стороны в направлении, в котором заезжает рассматриваемое транспортное средство, и конец второй линии W2 разметки (образующей пару с первой линией W1 разметки) дальней стороны в направлении, в котором заезжает рассматриваемое транспортное средство, могут быть обнаружены, цель p3 парковки устанавливается на прямой линии, соединяющей между собой конец на первой линии W1 разметки и конец на второй линии W2 разметки, и управление парковкой выполняется так, что положение колеса дальней стороны в направлении, в котором рассматриваемое транспортное средство заезжает в свободное парковочное место, совпадает с целью p3 парковки (первая половина этапа S100). Следовательно, это позволяет подавлять то, что рассматриваемое транспортное средство сильно выступает с любой из передней стороны и задней стороны из–за выступания с задней стороны.
[0124] На фиг.16А показан случай парковки передом, а на фиг.16В – случай парковки задом. Фиг. 16А и 16В соответствуют фиг. 15А и 15В соответственно. Поэтому подробное объяснение фиг. 16 опущено.
[0125] Фиг.17 – вид сверху, показывающий транспортное средство V1 и парковочное место, в котором остается только конец первой и второй линий W1 и W2 разметки ближней стороны в направлении, в котором заезжает транспортное средство V1. В этом случае цель p3 парковки устанавливается на прямой линии L, соединяющей между собой конец дальней стороны первой линии W1 разметки в направлении, в котором въезжает рассматриваемое транспортное средство, и конец дальней стороны второй линии разметки в направлении, в котором въезжает рассматриваемое транспортное средство (этап S99).
[0126] В этом случае, когда конец первой линии W1 разметки ближней стороны в направлении, в котором заезжает рассматриваемое транспортное средство, и конец второй линии W2 разметки (образующей пару с первой линией W1 разметки) ближней стороны в направлении, в котором въезжает рассматриваемое транспортное средство, могут быть обнаружены, цель p3 парковки устанавливается на прямой линии, соединяющей между собой конец на первой линии W1 разметки и конец на второй линии W2 разметки, и управление парковкой выполняется так, чтобы положение конца ближней стороны в направлении, в котором рассматриваемое транспортное средство въезжает на свободное парковочное место, совпадало с целью p3 парковки (вторая половина этапа S100). Следовательно, это позволяет подавлять то, что рассматриваемое транспортное средство сильно выступает с любой из передней стороны и задней стороны вследствие выступания с передней стороны.
(Длина первой линии W1 разметки отличается от длины второй линии W2 разметки)
[0127] Первая линия W1 разметки и вторая линия W2 разметки для указания парковочного места не всегда представлены с одной и той же формой. Например, в случае, когда полоса R1 движения является косой, или парковочное место имеет странную форму, длины первой линии W1 разметки и второй линии W2 разметки могут отличаться друг от друга. Кроме того, когда с течением времени конец одной линии разметки исчезает больше, чем другой конец, длины первой линии W1 разметки и второй линии W2 разметки могут отличаться друг от друга. Кроме того, часть линии разметки может быть не обнаруживаемой датчиком.
[0128] Фиг.18 – вид сверху, показывающий парковочное место и транспортное средство V1, когда длины первой линии W1 разметки и второй линии W2 разметки отличаются друг от друга. В этом примере показан случай, когда конец первой линии W1 разметки ближней стороны в направлении, в котором заезжает транспортное средство V1, исчезает больше, чем конец второй линии W2 разметки, образующей пару с концом первой линии W1 разметки, и длина первой линии W1 разметки стала меньше, чем длина второй линии W2 разметки.
[0129] В примере, показанном на фиг. 18, угол между прямой линией L, соединяющей между собой конец первой линии W1 разметки и конец второй линии W2 разметки, образующей пару с первой линией W1 разметки, и первой линией W1 разметки или второй линией W2 разметки не является прямым углом (НЕТ на этапе S91). Кроме того, угол между прямой линией L, соединяющей между собой конец первой линии W1 разметки дальней стороны в направлении, в котором въезжает транспортное средство V1, и конец второй линии W2 разметки, и первой линией W1 разметки или второй линией W2 разметки является прямым углом или близок к прямому углу.
[0130] В этом случае цель p3 парковки устанавливается на прямой линии L дальней стороны в направлении, в котором въезжает транспортное средство V1. То есть, цель p3 парковки устанавливается на прямой линии L, при которой угол между прямой линией L, соединяющей между собой конец первой линии W1 разметки и конец второй линии W2 разметки, образующей с ней пару, и первой линией W1 разметки или второй линией W2 разметки близок к прямому углу (этап S101).
[0131] Затем управление парковкой выполняется так, чтобы колесо дальней стороны в направлении, в котором рассматриваемое транспортное средство въезжает на свободное парковочное место, совпадало с целью p3 парковки (первая половина этапа S102). В случае парковки задним ходом транспортное средство V1 припарковано так, что конец заднего колеса (задней стороны) транспортного средства V1 совпадает с целью p3 парковки. В случае парковки передним ходом, транспортное средство V1 припарковано так, что конец переднего колеса (передней стороны) транспортного средства V1 совпадает с целью p3 парковки.
[0132] Таким образом, поскольку цель p3 парковки для транспортного средства V1 установлена на прямой линии, близкой к прямому углу, многие транспортные средства V1 могут быть припаркованы внутри свободного парковочного места. Таким образом, величина выступания передней стороны или задней стороны может быть подавлена.
[0133] Кроме того, транспортное средство припарковано так, что колесо дальней стороны в направлении, в котором рассматриваемое транспортное средство заезжает на свободное парковочное место, совпадает с концами первой линии W1 разметки и второй линии W2 разметки дальней стороны в направление, в котором въезжает рассматриваемое транспортное средство. Этот ее эффект такой же, как и в случае «колесная база < длина линии разметки < длина транспортного средства» (фиг.15).
[0134] Кроме того, угол между прямой линией L, соединяющей между собой конец первой линии W1 разметки ближней стороны в направлении, в котором заезжает транспортное средство V1, и конец второй линии W2 разметки, и первой линией W1 разметки или второй линией W2 разметки является прямым углом или близок к прямому углу (не показан), цель p3 парковки установлена на прямой линии L ближней стороны в направлении, в котором въезжает транспортное средство V1 (этап S101).
[0135] Тогда управление парковкой выполняется так, чтобы конец ближней стороны в направлении, в котором рассматриваемое транспортное средство заезжает на свободное парковочное место, совпадал с целью p3 парковки (вторая половина этапа S102). В случае парковки задом транспортное средство V1 припарковано так, что конец задней стороны транспортного средства V1 совпадает с целью p3 парковки. В случае парковки передом, транспортное средство V1 припарковано так, что конец передней стороны транспортного средства V1 совпадает с целью p3 парковки. Таким образом, транспортное средство V1 припарковано так, что конец транспортного средства совпадает с концами первой линии W1 разметки и второй линии W2 разметки ближней стороны в направлении, в котором въезжает рассматриваемое транспортное средство.
[0136] Таким образом, транспортное средство V1 припарковано так, что конец ближней стороны в направлении, в котором рассматриваемое транспортное средство заезжает на свободное парковочное место, совпадает с концами первой линии W1 разметки и второй линии W2 разметки ближней стороны в направлении, в котором въезжает рассматриваемое транспортное средство. Эффект этого такой же, как и в случае «Длина линии разметки > Длина транспортного средства» (фиг.13).
[0137] Более того, обнаруживают разницу между длиной первой линии W1 разметки и длиной второй линии W2 разметки, и, если разница между этими длинами равна или больше заданного значения (например, 50 см), цель p3 парковки устанавливают на прямой линии L, при которой угол между прямой линией L, соединяющей между собой конец первой линии W1 разметки и конец второй линии W2 разметки, образующей с ней пару, и первой линией W1 разметки или второй линией W2 разметки близок к прямому углу.
[0138] Если разность между длиной первой линии W1 разметки и длиной второй линии W2 разметки равна или больше заданного значения, транспортное средство V1 может сильно выступать с любой из передней или задней стороны. Однако разницу между длиной первой линии W1 разметки и длиной второй линии W2 разметки обнаруживают, и, если разница между этими длинами равна или превышает заданное значение (например, 50 см), цель p3 парковки устанавливают на прямой линии L, при которой угол между прямой линией L, соединяющей между собой конец первой линии W1 разметки и конец второй линии W2 разметки, образующей с ней пару, и первой линией W1 разметки или второй линией W2 разметки близок к прямому углу. Соответственно, выступание передней стороны или задней стороны может быть подавлено.
[0139] Как упомянуто выше, в соответствии со способом помощи при парковке согласно настоящему варианту осуществления, обнаруживают первую линию W1 разметки свободного парковочного места в направлении, ортогональном направлению по ширине транспортного средства, и вторую линию W2 разметки, которая образует пару с первой линией разметки, устанавливают цель p3 парковки на прямой линии L, соединяющей между собой точку на первой линии W1 разметки и точку на второй линии W2 разметки, и выполняют управление парковкой так, чтобы положение колеса рассматриваемого транспортного средства совпало с целью p3 парковки. Таким образом, транспортное средство может быть припарковано в подходящем положении свободного парковочного места.
[0140] Кроме того, цель парковки устанавливают на прямой линии, соединяющей между собой конец на первой линии разметки и конец на второй линии разметки, и выполняют управление парковкой так, чтобы положение колеса рассматриваемого транспортного средства совпало с целью парковки. Таким образом, поскольку выступание транспортного средства V различимо между передней стороной и задней стороной, можно исключить выступание передней или задней стороны.
[0141] Кроме того, измеряют расстояние свободного хода L1, когда транспортное средство V1 останавливается в положении р2 разворота, используют это расстояние свободного хода L1 в качестве величины отклонения и корректируют целевую скорость так, что величина отклонения может быть уменьшена. Соответственно, даже если расстояние свободного хода возникает, транспортное средство V1 может парковаться на цели p3 парковки с высокой точностью.
[0142] Кроме того, осуществляют перемещение транспортного средства V1 задом на то же расстояние, что и расстояние свободного хода L1, когда транспортное средство V1 останавливается в положении р2 разворота, и впоследствии осуществляют перемещение транспортного средства V1 задом по маршруту x1 парковки. Соответственно, даже если транспортное средство V1 выполняет свободный ход в положении p2 разворота, величина отклонения компенсируется, и поэтому можно перемещать транспортное средство по маршруту x1 парковки.
[0143] Кроме того, когда транспортное средство V1 движется задом на то же расстояние, что и расстояние свободного хода L1, расстояние свободного хода L1 устанавливают при том же угле поворота руля, что и в случае движения передом, и поэтому можно надежно компенсировать расстояние свободного хода L1.
[0144] Оценивают величину отклонения, возникающего между текущим положением транспортного средства V1 из–за последующей задержки фактического угла поворота руля относительно целевого угла поворота руля, и положение на целевом маршруте, и целевой угол поворота руля корректируют так, что величина отклонения уменьшается. Соответственно, даже если такая последующая задержка угла поворота руля возникает, транспортное средство может безопасно перемещаться по маршрутам x0 и x1 парковки.
[0145] Кроме того, оценивают величину отклонения, возникающего между текущим положением транспортного средства V1 из–за установившегося отклонения фактического угла поворота руля относительно целевого угла поворота руля, и положение на целевом маршруте, и целевой угол поворота руля корректируют так, что величина отклонения уменьшается. Соответственно, даже если такое установившееся отклонение угла поворота руля возникает, транспортное средство может надежно перемещаться по маршрутам x0 и x1 парковки. Соответственно, транспортное средство V1 может быть припарковано в подходящем положении парковочного места.
[0146] Когда на свободном парковочном месте обнаруживают колесоотбойник и такой колесоотбойник фактически обнаружен, управление парковкой может быть выполнено так, чтобы положение колеса рассматриваемого транспортного средства могло совпадать с колесоотбойником. Соответственно, поскольку транспортное средство V1 может быть припарковано так, чтобы оно совпадало с колесоотбойником, даже в том случае, если имеется колесоотбойник, транспортное средство V1 может быть припарковано в подходящем положении на свободном парковочном месте.
[0147] Устройство 100 управления парковкой согласно настоящему варианту осуществления может использоваться для интеллектуальной помощи при парковке для автоматического управления вождением, так что транспортное средство достигает цели p3 парковки по маршруту парковки, установленному блоком 31 формирования маршрута парковки.
[0148] Кроме того, если в вышеупомянутую конфигурацию принять конфигурацию, в которую добавлена функция отображения информации о поддержке для отображения различной информации о поддержке, которая используется тогда, когда водители выполняют операцию вождения во время парковки, такую как графика для указания текущего положения транспортного средства V1, графика для представления цели p3 парковки и положения p2 разворота, информация для выдачи инструкций об угле поворота руля в исходном положении p1 или в положении p2 разворота, например, водителям может быть оказана помощь, чтобы им было легче работать. Кроме того, если может быть выполнена звуковая помощь для направления рулевого управления, величины поворота руля и т. д. с использованием громкоговорителя, установленного в транспортном средстве V1, так что транспортное средство V1 может перемещаться по маршрутам x0 и x1 парковки, то может быть реализована более детализированная помощь при парковке.
[0149] Как упомянуто выше, хотя способ помощи при парковке и устройство управления парковкой по настоящему изобретению были объяснены на основе проиллюстрированных вариантов осуществления, настоящее изобретение не ограничено ими, и конфигурация каждой части может быть заменена любыми конфигурациями, имеющими аналогичную функцию. Например, в вышеописанных вариантах осуществления были описаны примеры, в которых транспортные средства паркуются параллельно, но настоящее изобретение также может быть применено к параллельной парковке. Кроме того, настоящее изобретение не ограничено транспортными средствами, но может быть применено к любому мобильному телу.
[0150] Функции, описанные в соответствующих вариантах осуществления, могут быть реализованы в одной или более цепях обработки данных. Такая цепь обработки данных включает в себя запрограммированное устройство обработки, такое как устройство обработки, включающее в себя электрическую цепь. Кроме того, устройство обработки может включать в себя специализированную интегральную схему (ASIC) и/или устройство, такое как традиционный схемный компонент, предназначенное для выполнения функций, описанных в соответствующих вариантах осуществления.
[0151] Способ помощи при парковке по настоящему изобретению выполняют тогда, когда нет препятствий вокруг рассматриваемого транспортного средства. Например, когда датчик 10 обнаружения целевой парковочной разметки обнаруживает какое-либо препятствие на маршруте парковки, само собой разумеется, управление помощью парковке немедленно прекращается, и безопасность является главным приоритетом.
СПИСОК ССЫЛОЧНЫХ ОБОЗНАЧЕНИЙ
[0152] 10 – Датчик обнаружения целевой парковочной разметки
10a, 10b, 10c, 10d – Камера
10e – Контур обнаружения линий разметки
20 – Блок обработки информации изображений (контур установки целевого положения)
21 – Блок обнаружения целевой парковочной разметки
22 – Блок установки целевого положения парковки
23 – Блок установки начального положения парковки
24 – Блок оценки текущего положения
30 – Блок расчета помощи парковке (контур управления транспортным средством)
31 – Блок формирования маршрута парковки
32 – Блок управления отслеживанием маршрута парковки
33 – Блок управления углом поворота руля
34 – Блок генерации целевой скорости
35 – Блок управления скоростью
40 – ЭБУ транспортного средства
50 – Привод
51 – Интерфейс ввода
52 – Датчик частоты вращения колеса
53 – Датчик угла поворота руля.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ УПРАВЛЕНИЯ ПАРКОВКОЙ И УСТРОЙСТВО УПРАВЛЕНИЯ ПАРКОВКОЙ | 2017 |
|
RU2742530C1 |
| СПОСОБ УПРАВЛЕНИЯ ПАРКОВКОЙ И УСТРОЙСТВО УПРАВЛЕНИЯ ПАРКОВКОЙ | 2017 |
|
RU2740661C1 |
| СПОСОБ ПОМОЩИ ПРИ ПАРКОВКЕ И УСТРОЙСТВО ПОМОЩИ ПРИ ПАРКОВКЕ | 2020 |
|
RU2791347C1 |
| СПОСОБ УПРАВЛЕНИЯ ПАРКОВКОЙ И УСТРОЙСТВО УПРАВЛЕНИЯ ПАРКОВКОЙ | 2017 |
|
RU2736960C1 |
| СПОСОБ УПРАВЛЕНИЯ ПАРКОВКОЙ И УСТРОЙСТВО УПРАВЛЕНИЯ ПАРКОВКОЙ | 2017 |
|
RU2740111C1 |
| СПОСОБ УПРАВЛЕНИЯ ПАРКОВКОЙ И УСТРОЙСТВО УПРАВЛЕНИЯ ПАРКОВКОЙ | 2017 |
|
RU2735340C1 |
| СПОСОБ ПОМОЩИ ПРИ ПАРКОВКЕ И УСТРОЙСТВО ПОМОЩИ ПРИ ПАРКОВКЕ | 2017 |
|
RU2734740C1 |
| СПОСОБ ПОМОЩИ ПРИ ПАРКОВКЕ ДЛЯ УСТРОЙСТВА ПОМОЩИ ПРИ ПАРКОВКЕ И УСТРОЙСТВО ПОМОЩИ ПРИ ПАРКОВКЕ | 2017 |
|
RU2734643C1 |
| СПОСОБ ПОМОЩИ ПРИ ПАРКОВКЕ И УСТРОЙСТВО ПОМОЩИ ПРИ ПАРКОВКЕ | 2019 |
|
RU2804496C1 |
| СПОСОБ УПРАВЛЕНИЯ ПАРКОВКОЙ И УСТРОЙСТВО УПРАВЛЕНИЯ ПАРКОВКОЙ | 2017 |
|
RU2738780C1 |
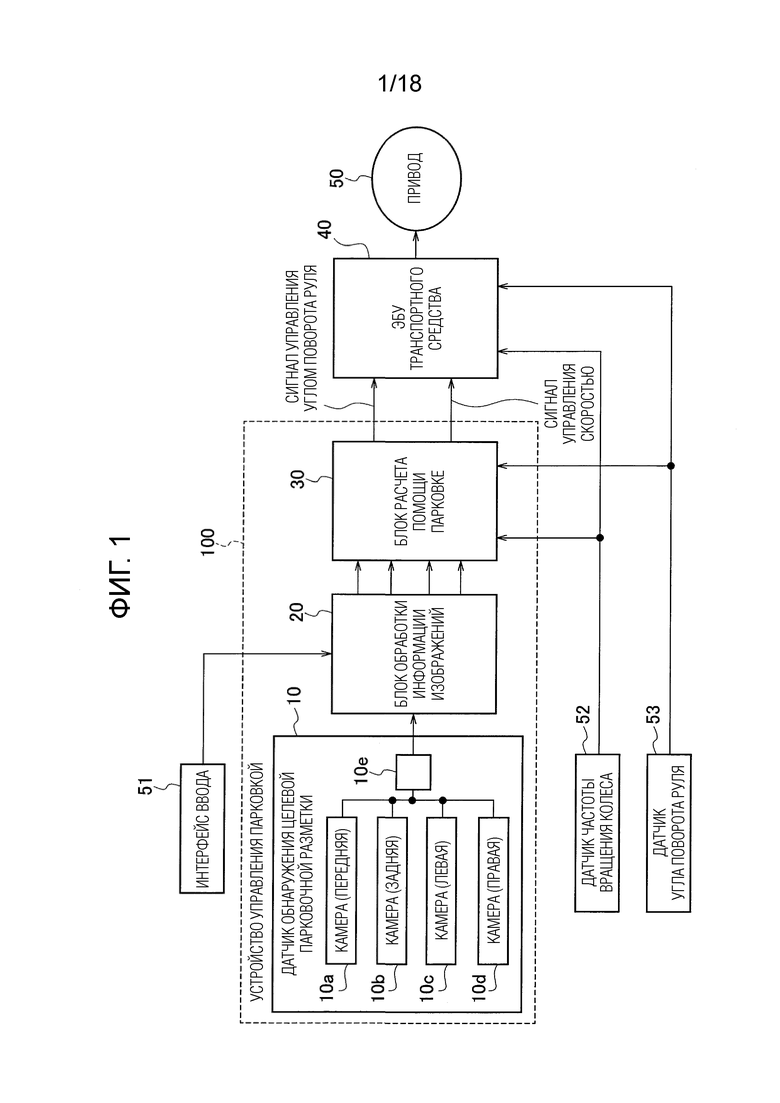
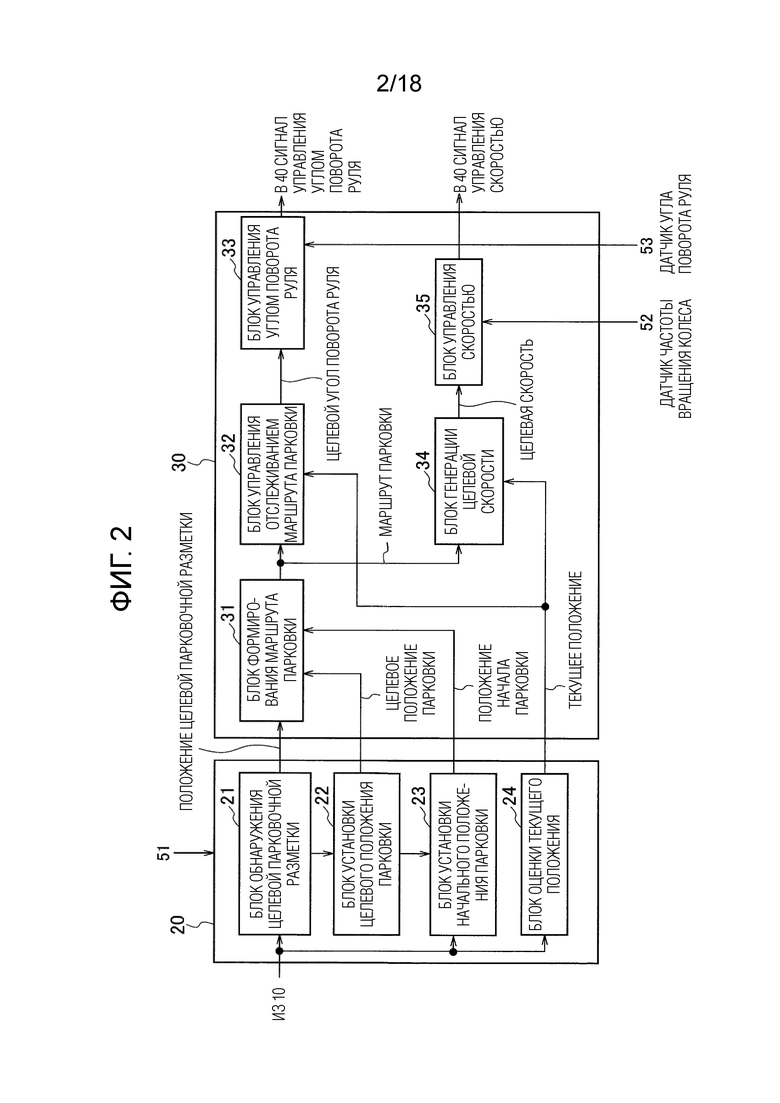
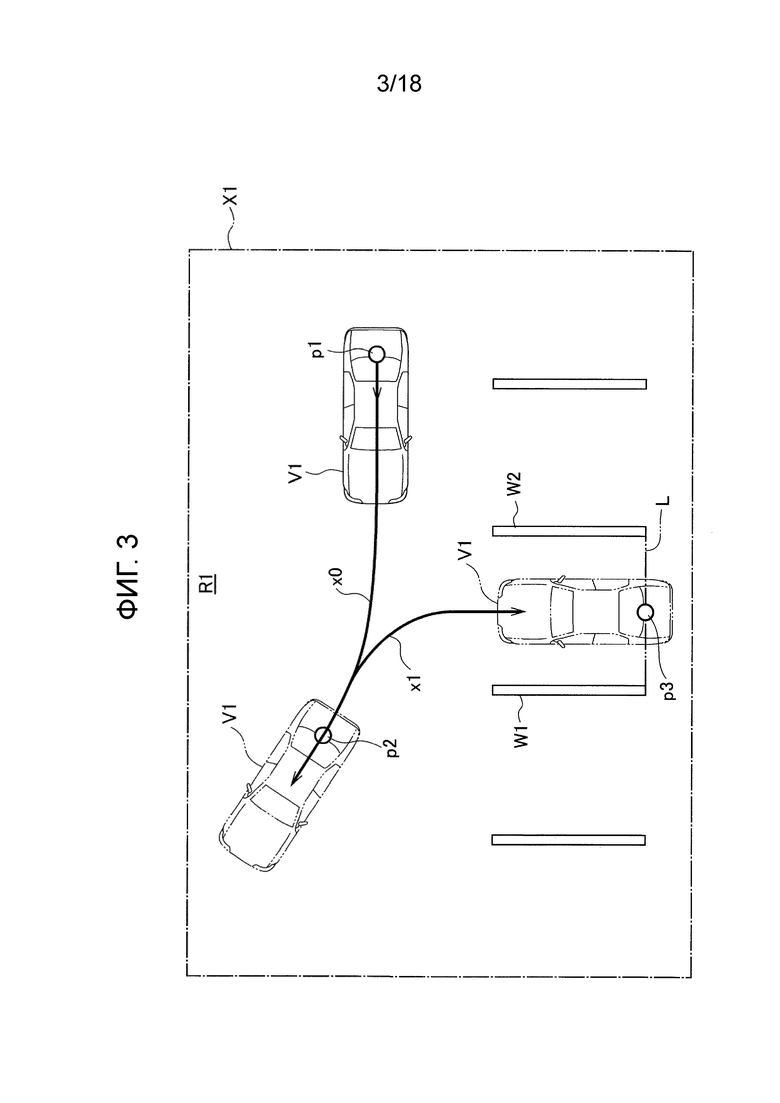
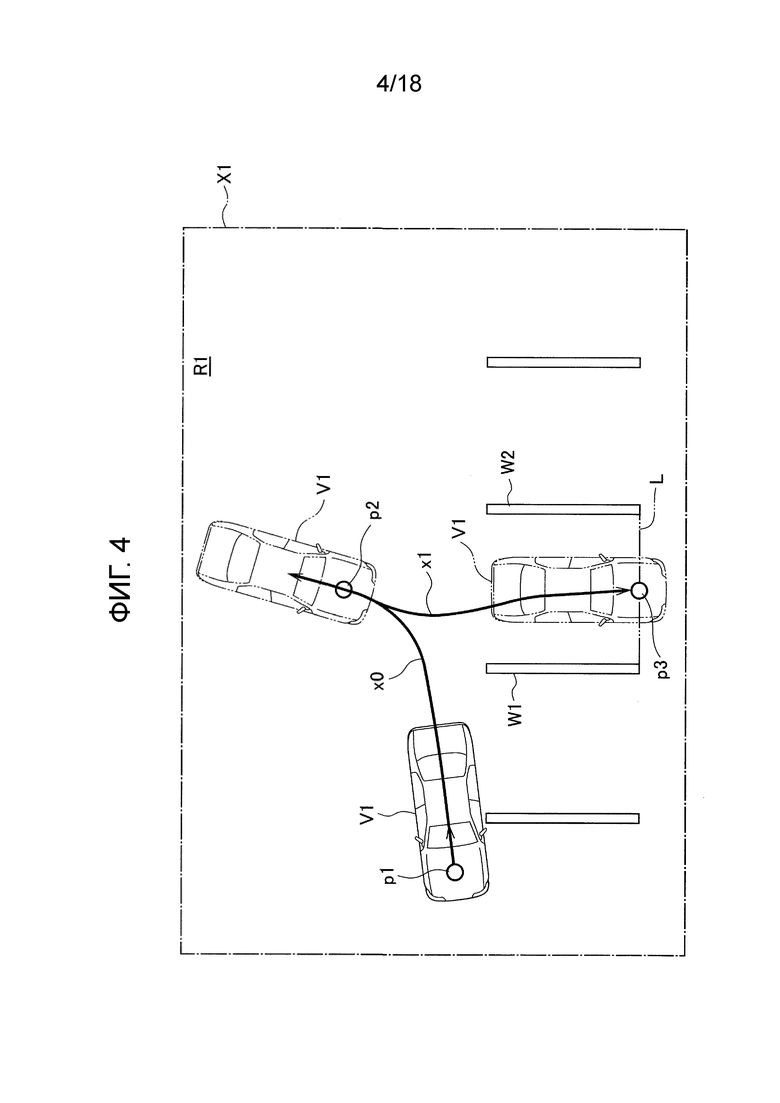
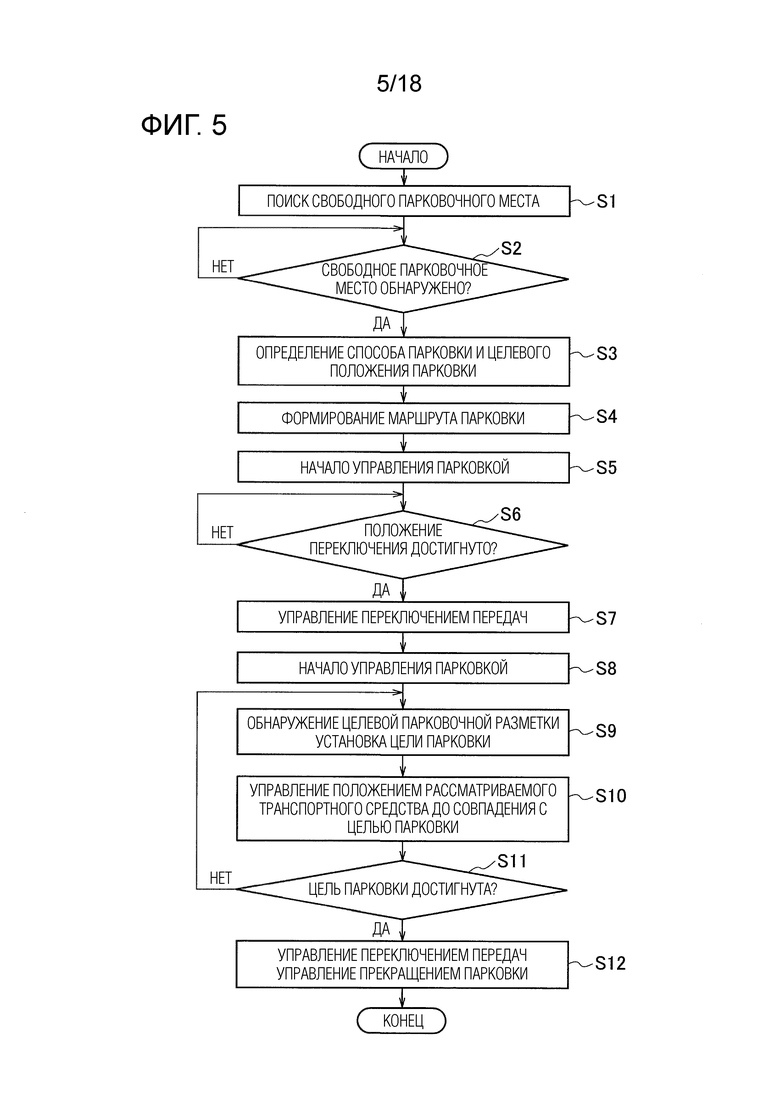
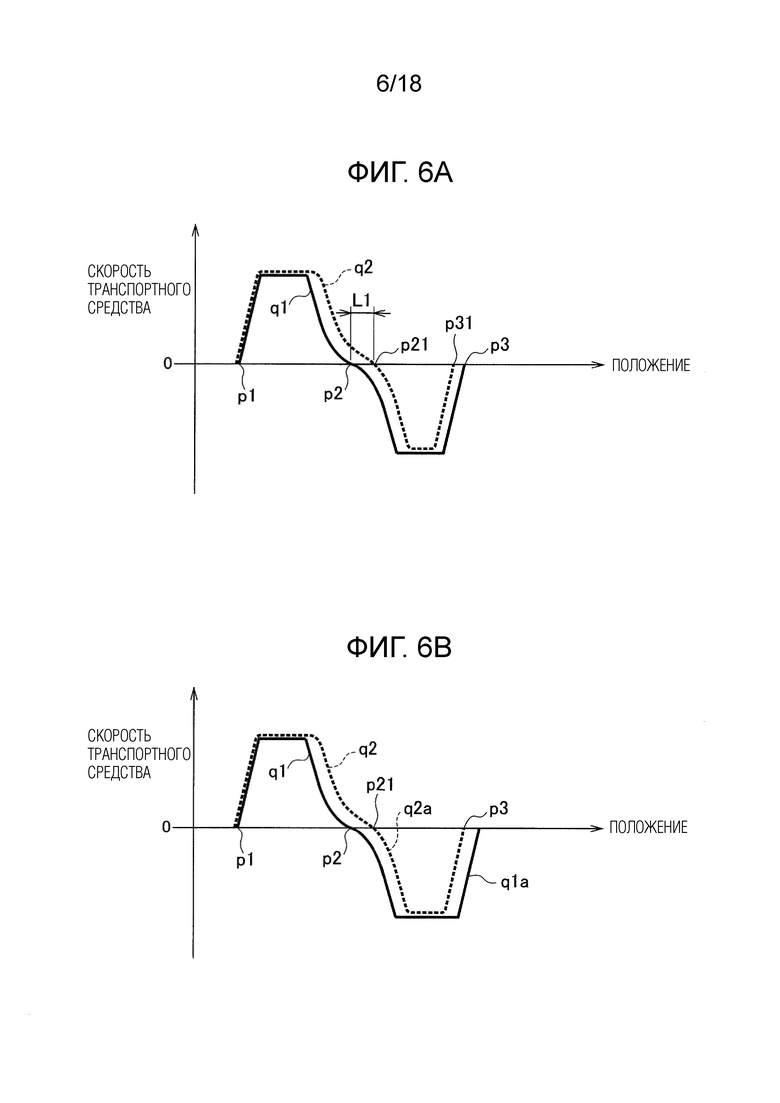
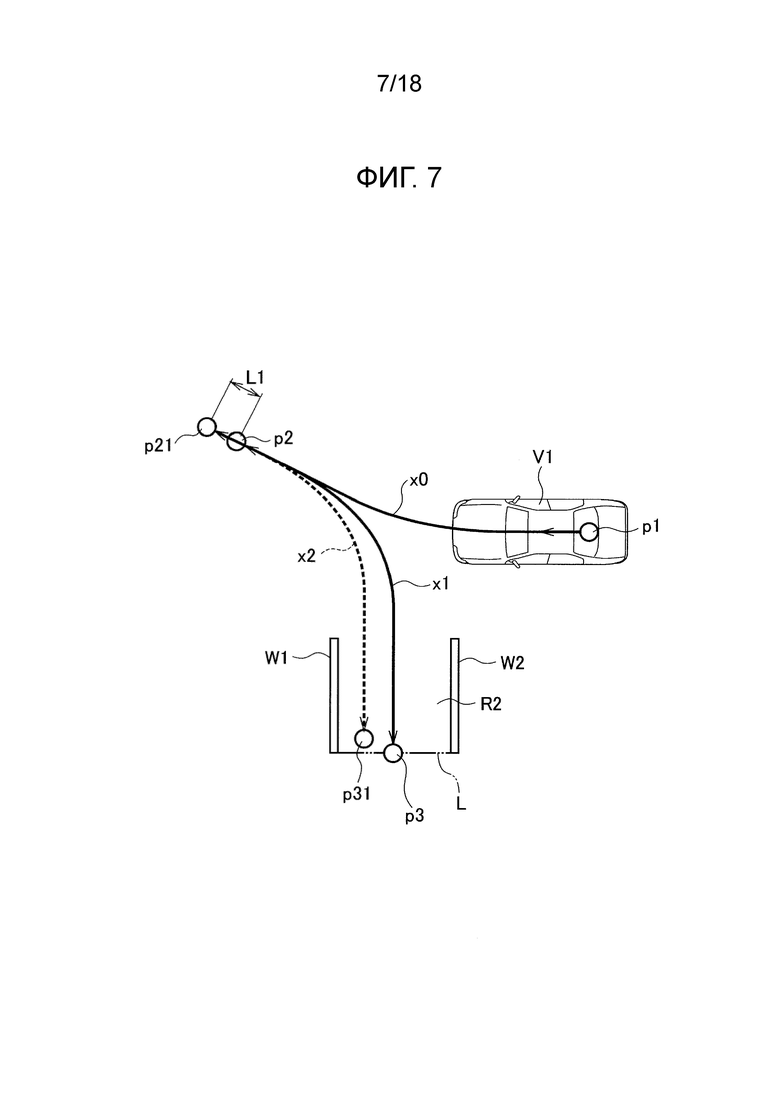
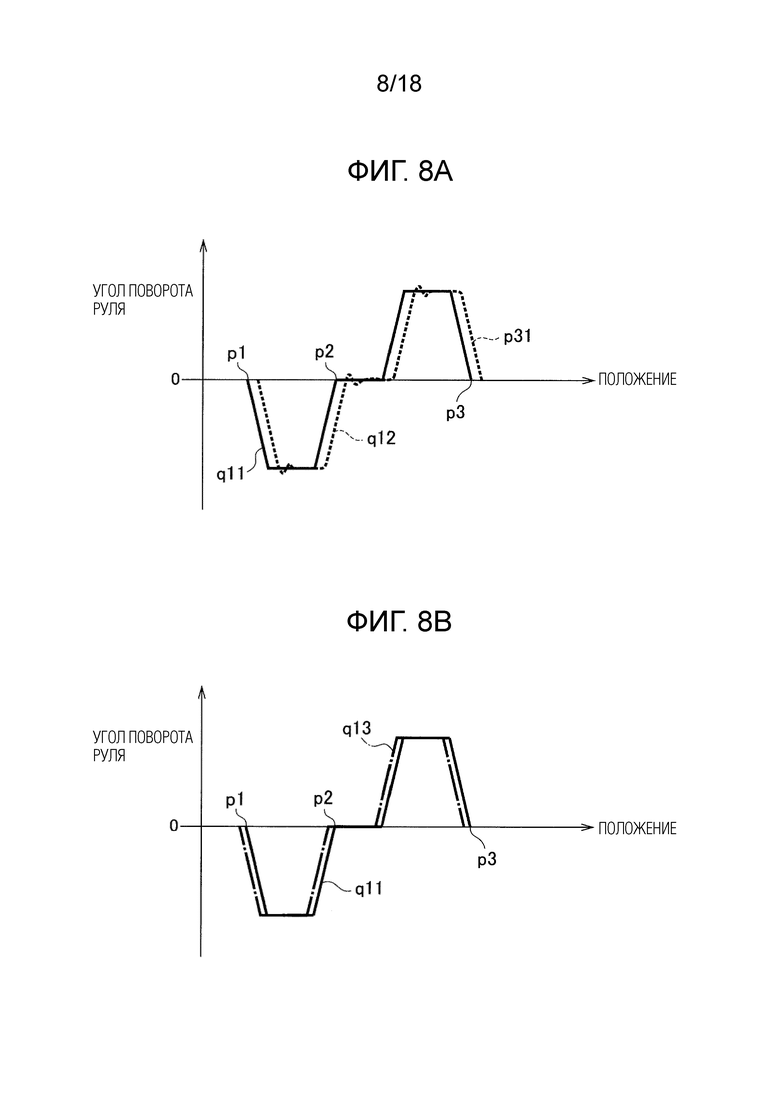
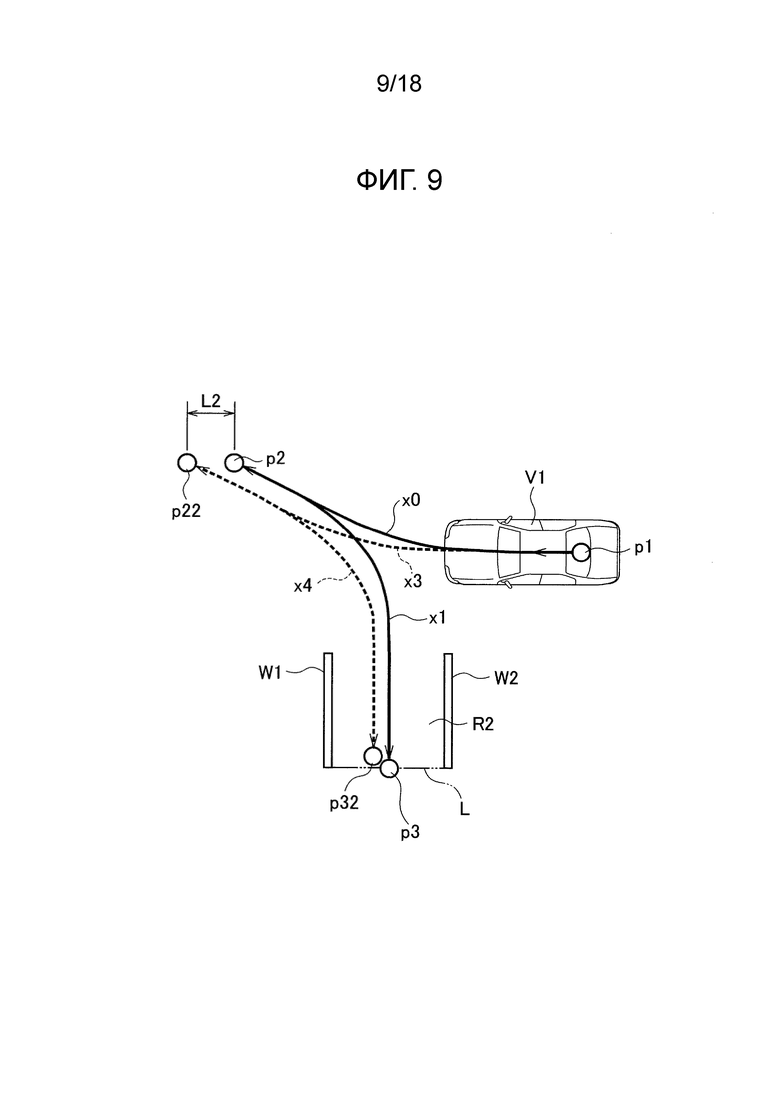
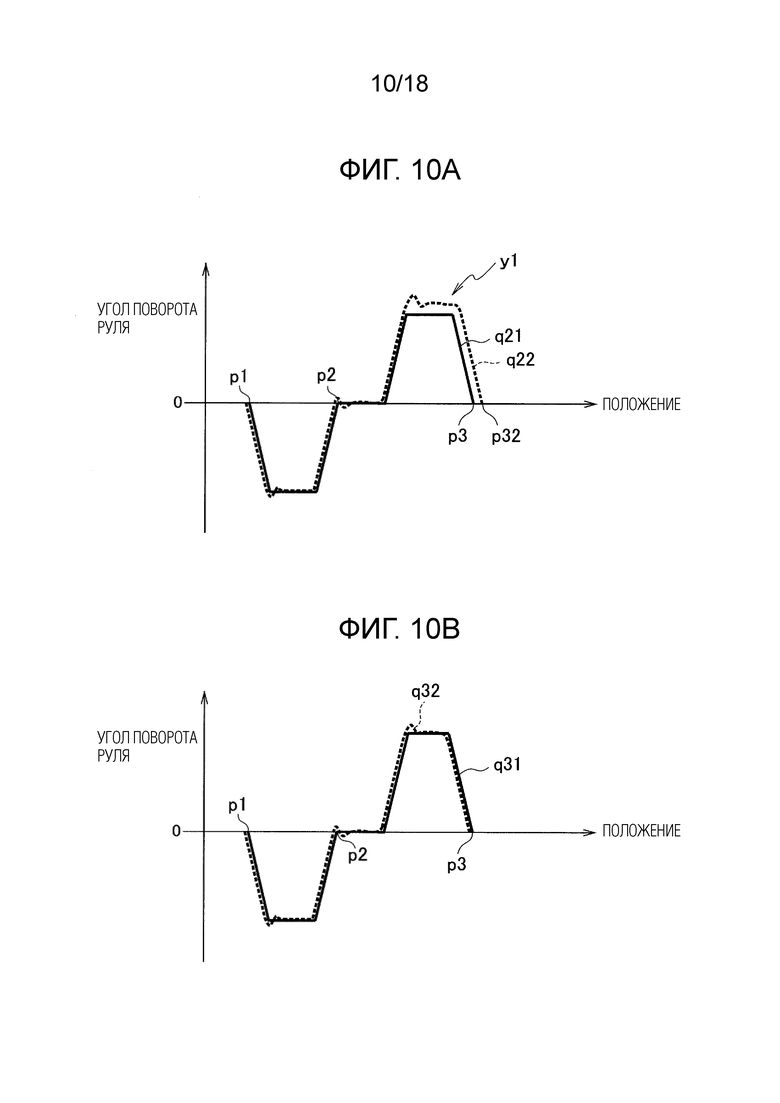
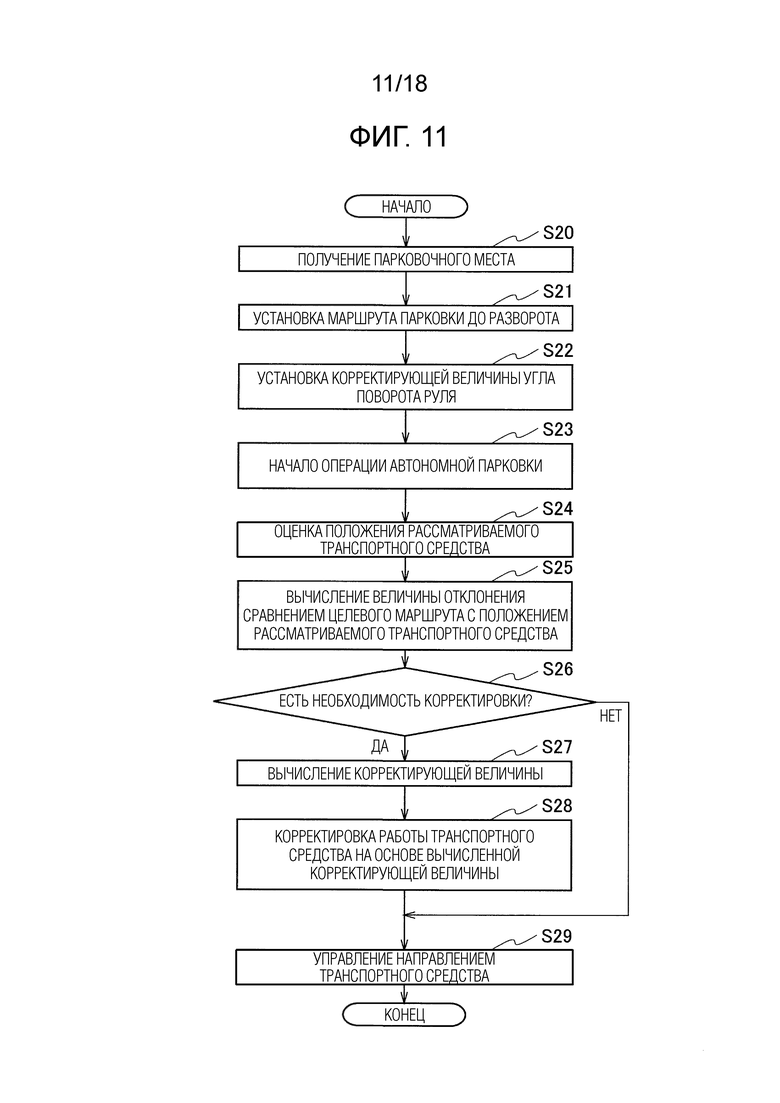
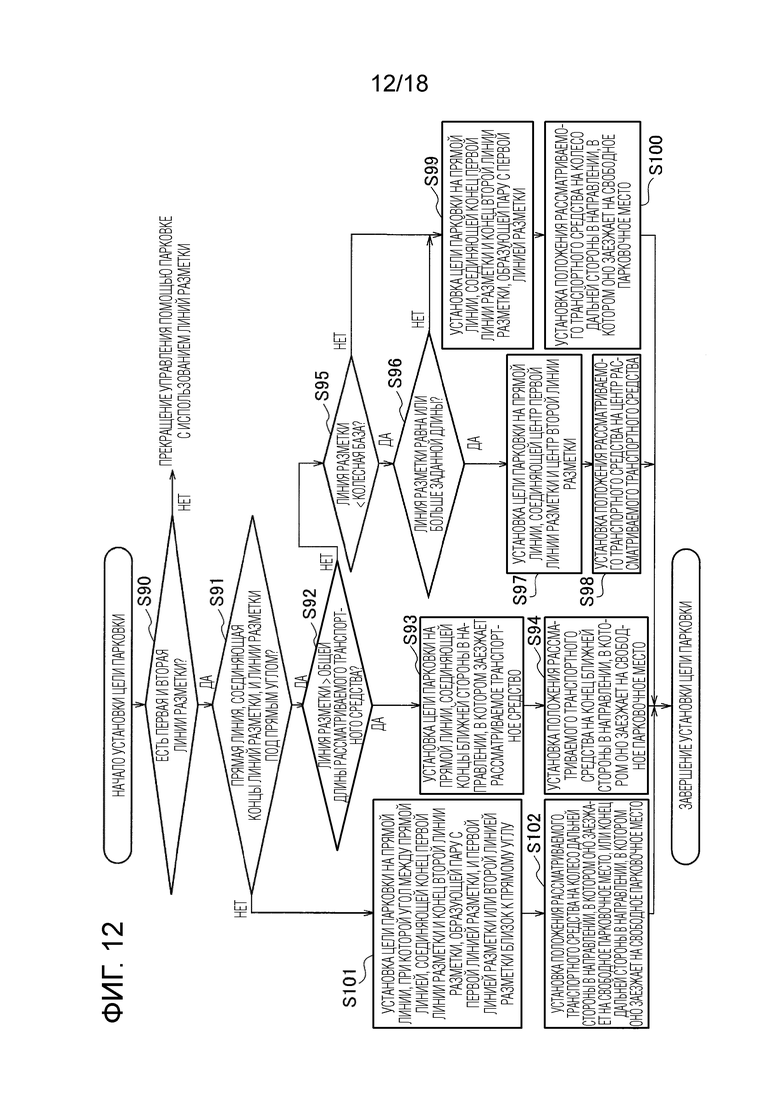
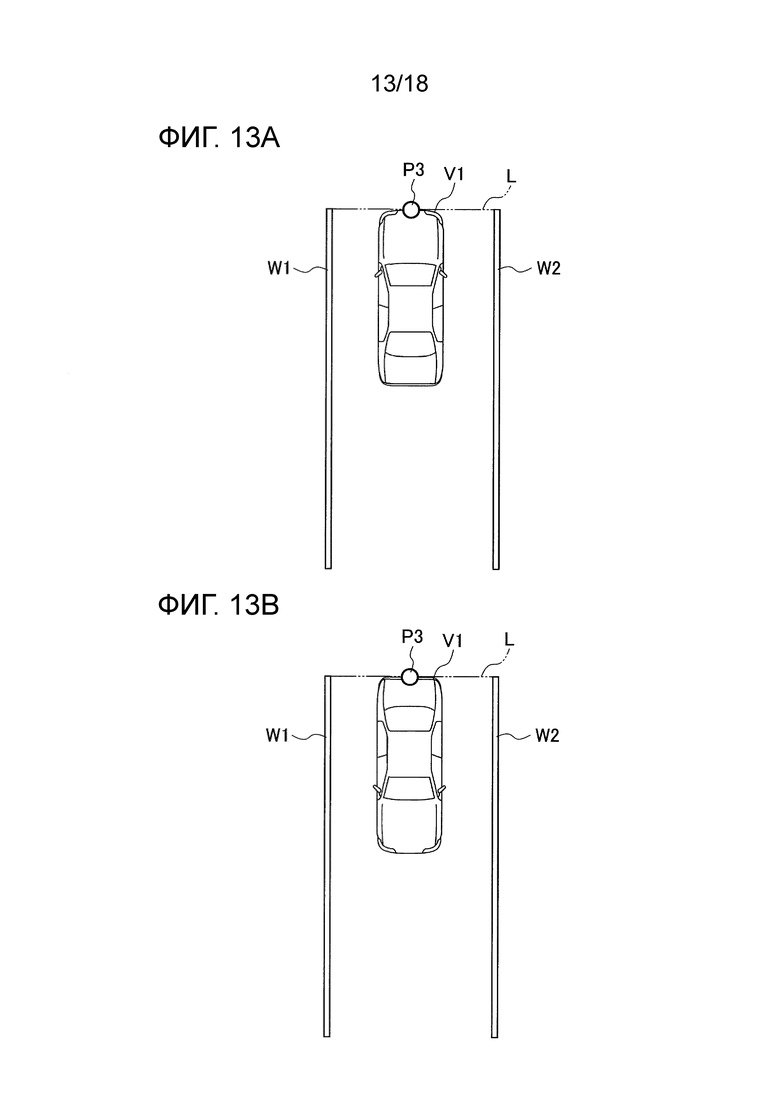
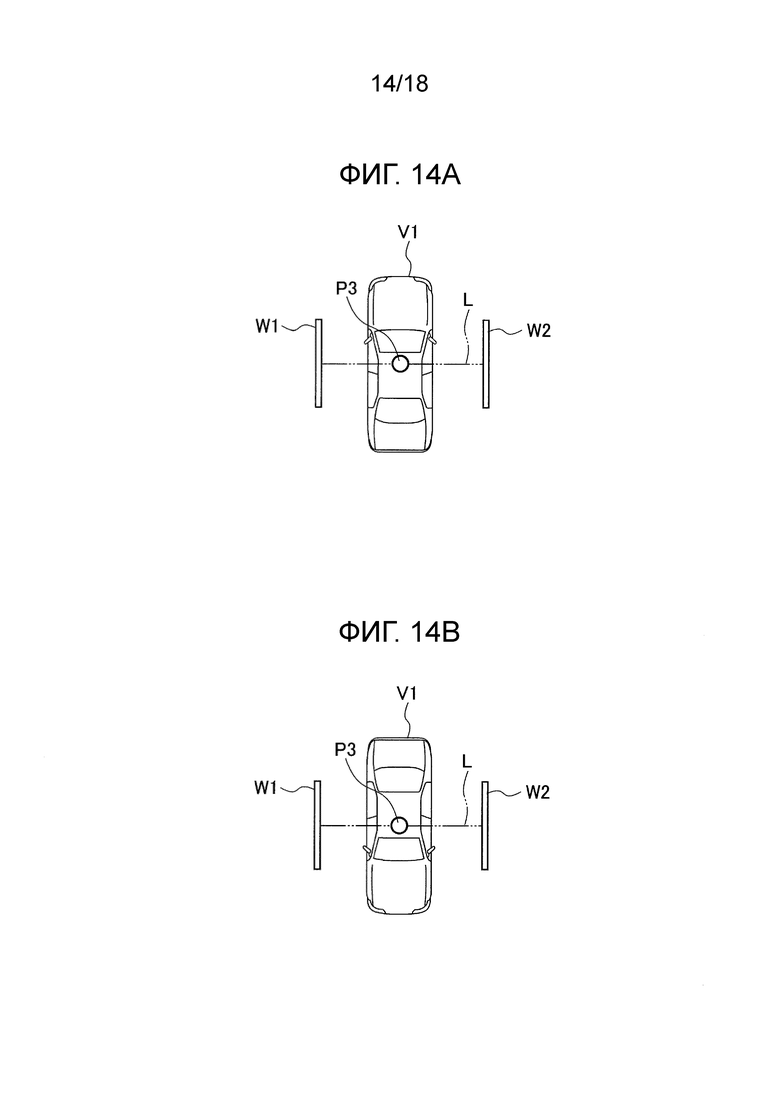
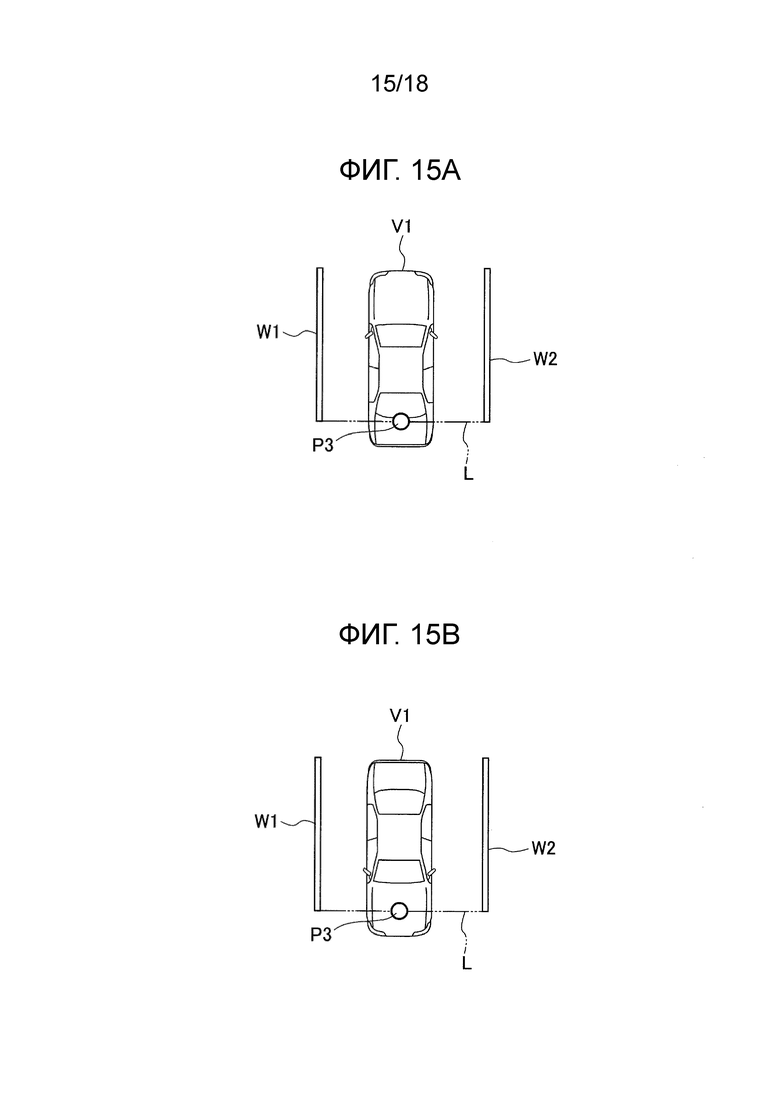
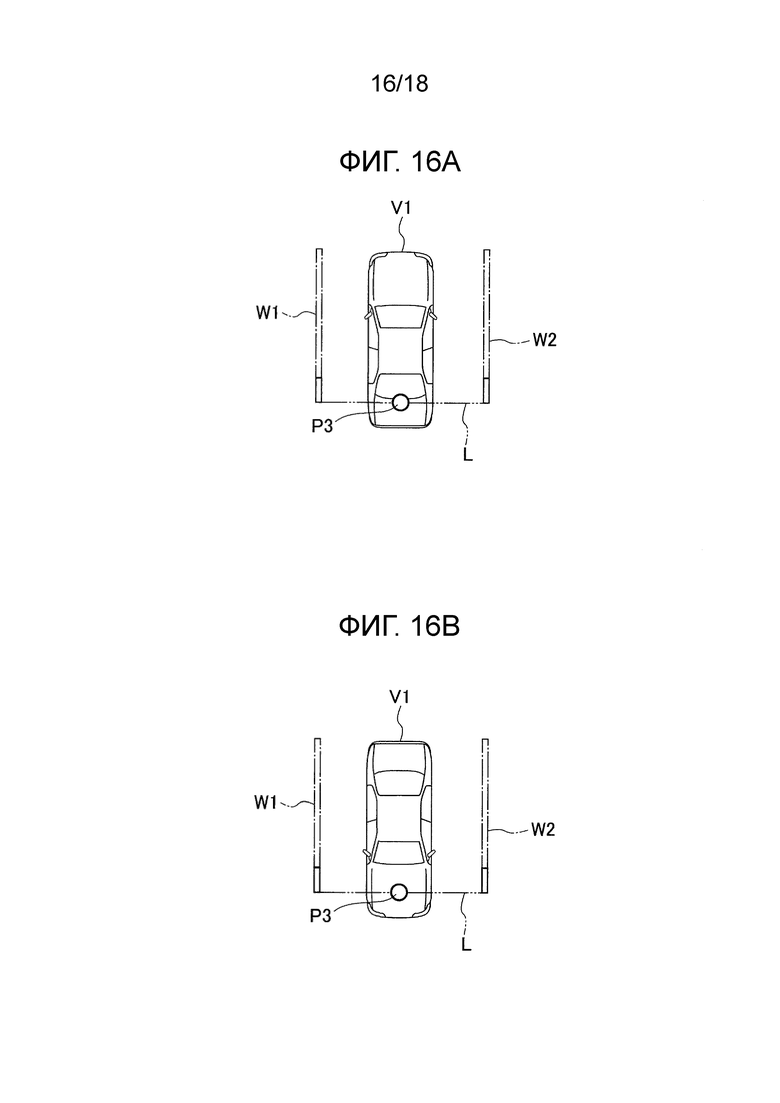
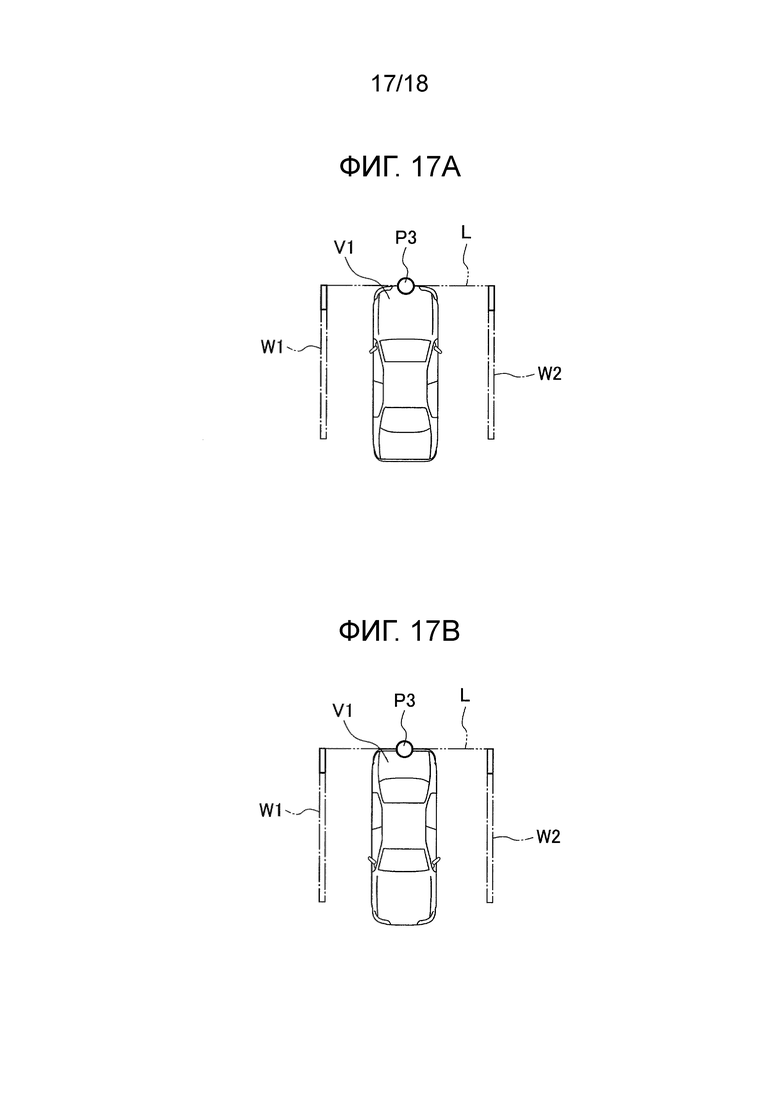
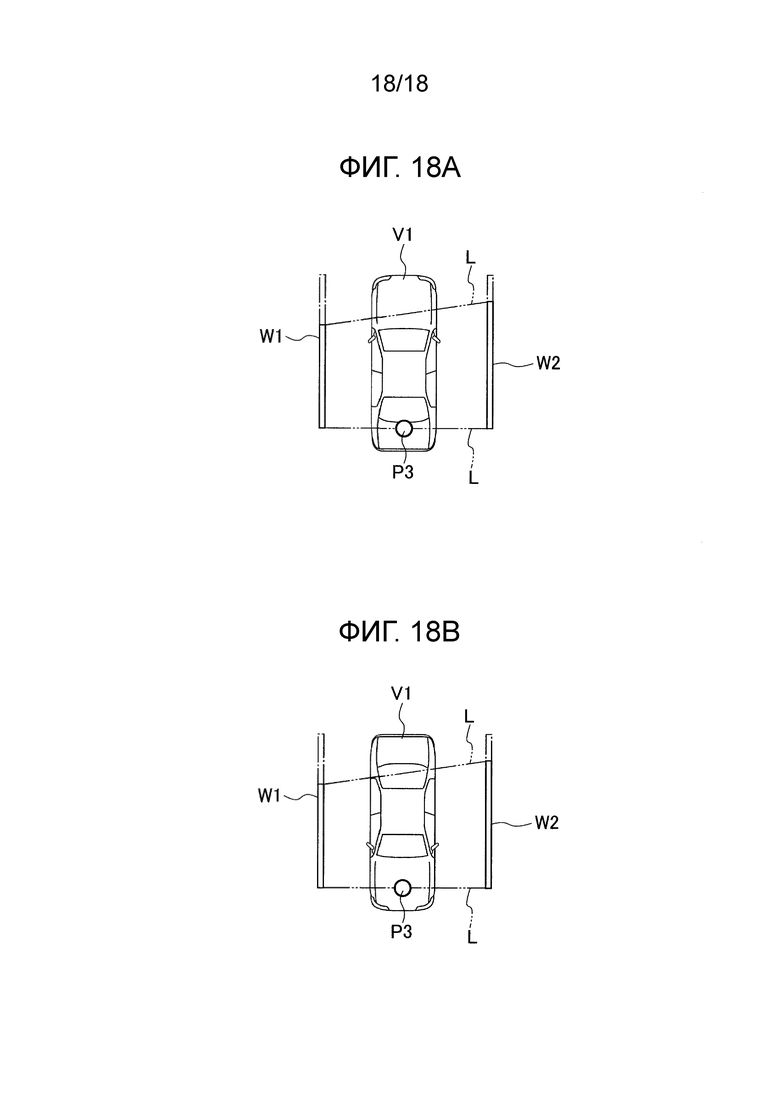
Изобретение относится к способу помощи при парковке и устройству управления парковкой. Способ помощи при парковке для устройства управления парковкой содержит обнаружение первой линии разметки свободного парковочного места и второй линии разметки, которая образует пару с первой линией разметки, устанавливание цели парковки на прямой линии, соединяющей между собой конец ближней стороны первой линии разметки и конец ближней стороны второй линии разметки или устанавливание цели парковки на прямой линии, соединяющей между собой конец дальней стороны первой линии разметки и конец дальней стороны второй линии разметки и выполнение управления парковкой. Устройство управления парковкой содержит датчик обнаружения целевой парковочной разметки, контур установки целевого положения и контур управления транспортным средством, выполненный с возможностью выполнения управления парковкой так, чтобы положение колеса рассматриваемого транспортного средства совпало с целью парковки. Достигается своевременная парковка транспортного средства. 2 н. и 5 з.п. ф-лы, 27 ил.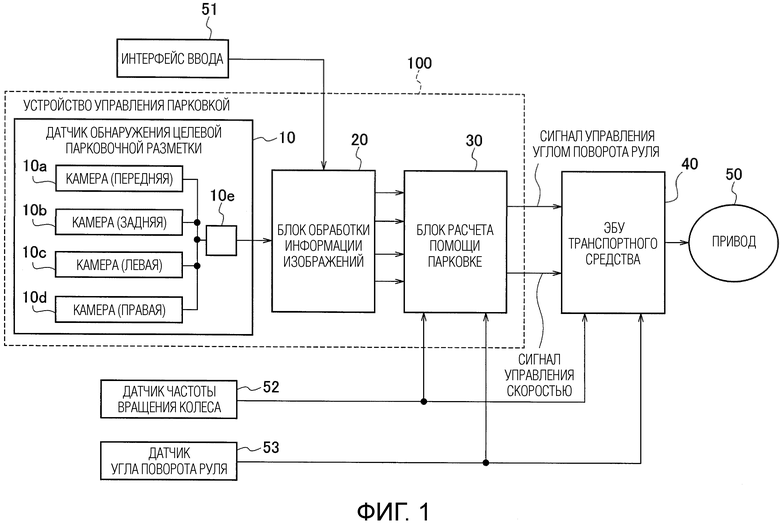
1. Способ помощи при парковке для устройства управления парковкой, которое выполняет управление парковкой на свободное парковочное место вокруг рассматриваемого транспортного средства, содержащий:
обнаружение первой линии разметки свободного парковочного места в направлении, ортогональном направлению по ширине транспортного средства, и второй линии разметки, которая образует пару с первой линией разметки;
устанавливание цели парковки на прямой линии, соединяющей между собой конец ближней стороны первой линии разметки в направлении, в котором заезжает рассматриваемое транспортное средство, и конец ближней стороны второй линии разметки в направлении, в котором заезжает рассматриваемое транспортное средство, или
устанавливание цели парковки на прямой линии, соединяющей между собой конец дальней стороны первой линии разметки в направлении, в котором заезжает рассматриваемое транспортное средство, и конец дальней стороны второй линии разметки в направлении, в котором заезжает рассматриваемое транспортное средство; и
выполнение управления парковкой так, чтобы положение рассматриваемого транспортного средства совпало с целью парковки.
2. Способ помощи при парковке по п.1, дополнительно содержащий:
устанавливание цели парковки на прямой линии, при которой угол между прямой линией, соединяющей между собой конец первой линии разметки и конец образующей с ней пару второй линии разметки, и первой линией разметки или второй линией разметки близок к прямому углу.
3. Способ помощи при парковке по п.1 или 2, дополнительно содержащий:
обнаружение разности между длиной первой линии разметки и длиной второй линии разметки; и,
когда разность между этими длинами равна или больше заданного значения, устанавливание цели парковки на прямой линии, при которой угол между прямой линией, соединяющей между собой конец первой линии разметки и конец образующей с ней пару второй линии разметки, и первой линией разметки или второй линией разметки близок к прямому углу.
4. Способ помощи при парковке по п.1 или 2, дополнительно содержащий:
обнаружение длины первой линии разметки;
когда длина первой линии разметки меньше, чем общая длина рассматриваемого транспортного средства, устанавливание цели парковки на прямой линии, соединяющей между собой конец дальней стороны первой линии разметки в направлении, в котором заезжает рассматриваемое транспортное средство, и конец дальней стороны второй линии разметки в направлении, в котором заезжает рассматриваемое транспортное средство,
а когда длина первой линии разметки больше, чем общая длина рассматриваемого транспортного средства, устанавливание цели парковки на прямой линии, соединяющей между собой конец ближней стороны первой линии разметки в направлении, в котором заезжает рассматриваемое транспортное средство, и конец ближней стороны второй линии разметки в направлении, в котором заезжает рассматриваемое транспортное средство; и
выполнение управления парковкой так, чтобы положение колеса рассматриваемого транспортного средства совпало с целью парковки.
5. Способ помощи при парковке по п.4, дополнительно содержащий:
определение направления парковки рассматриваемого транспортного средства на свободное парковочное место;
когда рассматриваемое транспортное средство паркуется задом и длина первой линии разметки меньше, чем общая длина рассматриваемого транспортного средства, выполнение управления парковкой так, чтобы положение заднего колеса рассматриваемого транспортного средства совпало с целью парковки; а
когда рассматриваемое транспортное средство паркуется задом и длина первой линии разметки больше, чем общая длина рассматриваемого транспортного средства, выполнение управления парковкой так, чтобы положение переднего края рассматриваемого транспортного средства совпало с целью парковки.
6. Способ помощи при парковке по п.4, дополнительно содержащий:
определение направления парковки рассматриваемого транспортного средства на свободное парковочное место;
когда рассматриваемое транспортное средство паркуется передом и длина первой линии разметки меньше, чем общая длина рассматриваемого транспортного средства, выполнение управления парковкой так, чтобы положение переднего колеса рассматриваемого транспортного средства совпало с целью парковки; а
когда рассматриваемое транспортное средство паркуется задом и длина первой линии разметки больше, чем общая длина рассматриваемого транспортного средства, выполнение управления парковкой так, чтобы положение заднего края рассматриваемого транспортного средства совпало с целью парковки.
7. Устройство управления парковкой, которое выполняет управление парковкой на свободное парковочное место вокруг рассматриваемого транспортного средства, содержащее:
датчик обнаружения целевой парковочной разметки, выполненный с возможностью обнаружения первой линии разметки свободного парковочного места в направлении, ортогональном направлению по ширине транспортного средства, и второй линии разметки, которая образует пару с первой линией разметки;
контур установки целевого положения, выполненный с возможностью устанавливания цели парковки на прямой линии, соединяющей между собой конец ближней стороны первой линии разметки в направлении, в котором заезжает рассматриваемое транспортное средство, и конец ближней стороны второй линии разметки в направлении, в котором заезжает рассматриваемое транспортное средство, или устанавливания цели парковки на прямой линии, соединяющей между собой конец дальней стороны первой линии разметки в направлении, в котором заезжает рассматриваемое транспортное средство, и конец дальней стороны второй линии разметки в направлении, в котором заезжает рассматриваемое транспортное средство; и
контур управления транспортным средством, выполненный с возможностью выполнения управления парковкой так, чтобы положение колеса рассматриваемого транспортного средства совпало с целью парковки.
| US 2016114795 A1, 28.04.2016 | |||
| US 9162621 B2, 20.10.2015 | |||
| JP 2017021747 A, 26.01.2017. |

