Область техники, к которой относится изобретение
Настоящее изобретение относится к системе динамического ведения и способу автоматического управления для автономного транспортного средства, движущегося в воздухе, например, беспилотного летательного аппарата (дрона) или по земле, например, транспортного средства или по воде, например, корабля.
Уровень техники
При выполнении, например, типовых задач наблюдения может быть полезно применение автономных устройств, обладающих возможностью надлежащего самоуправления путем использования опорных точек, размещенных по их пути следования. Такие устройства как, например, беспилотные летательные аппараты (дроны), роботы или транспортные средства могут быть с пользой оснащены автоматической системой ведения. Однако на эти устройства часто накладываются ограничения в отношении массы и габаритных размеров. Соответственно, устройства, находящиеся на их борту, должны соответствовать этим требованиям и оставаться в пределах допустимых диапазонов объема и массы. Кроме того, движущиеся устройства должны обеспечивать возможность быстрого отслеживания и идентификации препятствий или опорных точек, необходимых для движения по маршруту. На практике устройства, слишком требовательные с точки зрения аналитических ресурсов, из-за чрезмерно большого времени реакции невозможно адаптировать к скорости подобных устройств.
Раскрытие изобретения
Одной целью настоящего изобретения является предложение устройства - маяка, которое может быть уникальным образом идентифицировано времяпролетной (Time-of-Flight) камерой.
Еще одной целью настоящего изобретения является предложение системы или устройства ведения и управления, которая является легкой, быстрой, автономной и адаптируемого к любому движущемуся устройству, воздушному, наземному или водному. Например, система может быть связана или скомбинирована или объединена с мобильным телефоном или любым другим устройством мобильной связи, в том числе с планшетом, смартфоном, системой определения местоположения, например, GPS, и т.п.
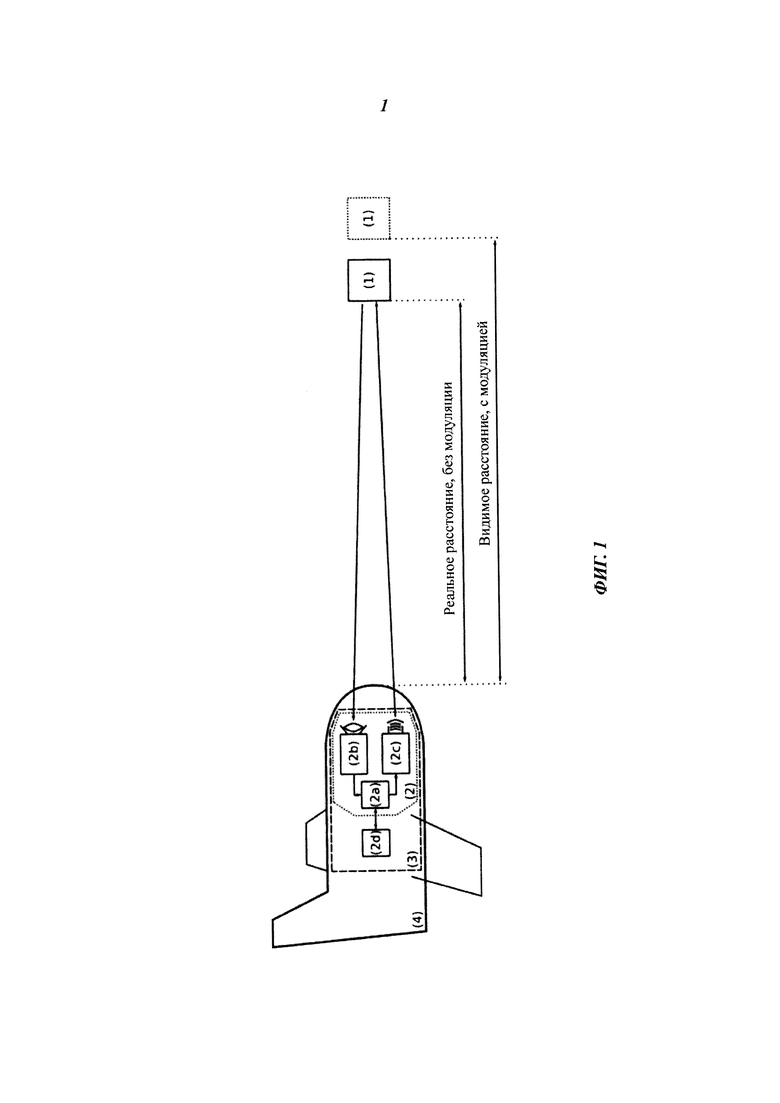
В соответствии с настоящим изобретением указанная цель достигается посредством системы или устройства [фиг. 1, (1) и (3)] активного ведения и управления, дающего возможность определения пространственного положения движущегося объекта [фиг. 1, (4)], а также возможность управляемого и автоматического ориентирования курса объекта.
Конкретно, настоящее изобретение в качестве своего предмета имеет систему динамического ведения, содержащую трехмерную камеру, основанную на времяпролетной технологии, содержащую приемник, чувствительный к световым излучениям, лежащим в определенном диапазоне длин волн, первый излучатель световых сигналов, микрокомпьютер, обеспечивающий взаимодействие и обрабатывающий трехмерную информацию, поступающую из приемника, а также управляющий излучателем, и внутренний или внешний вспомогательный компьютер, включающий средства анализа данных, сервисы базы данных, управления и внешнего взаимодействия с транспортным средством и локальными или глобальными сервисами обмена данными. Система дополнительно содержит маяк, чувствительный к световым сигналам, излучаемым первым излучателем световых сигналов трехмерной камеры, причем этот маяк оснащен вторым излучателем световых сигналов с длиной волны, согласованной с чувствительностью трехмерной камеры. Маяк содержит средства модуляции световых сигналов, излучаемых первым излучателем световых сигналов. Трехмерная камера выполнена с возможностью измерения времени возврата сигнала, переизлучаемого маяком. Модуляция реализована таким образом, чтобы обеспечивалась возможность уникальной идентификации и одновременного определения положения маяка в трехмерном объеме, охватываемом полем зрения трехмерной камеры, посредством трехмерной камеры и по меньшей мере двух зарегистрированных кадров. Уникальная идентификация маяка выполняется в микрокомпьютере путем анализа видимого расстояния до маяка в последовательных кадрах трехмерной камеры.
Более конкретно, система содержит два или более объекта, осуществляющих связь между собой. Первым объектом является трехмерная камера [фиг. 1, (2)], содержащая излучатель световых сигналов [фиг. 1, (2с)], а второй объект функционирует по типу маяка [фиг. 1, (1)], стационарного или подвижного, выполненного с возможностью распознавания световых сигналов, излучаемых трехмерной камерой [фиг. 1, (2)], и повторной передачи этих световых сигналов активным образом в направлении трехмерной камеры [фиг. 1, (2)], так что трехмерная камера [фиг. 1, (2)] может измерить свое расстояние, отделяющее ее от маяка, и может точного разместить его в своем поле зрения. Активный прием, модуляция и переизлучение светового сигнала из маяка [фиг. 1, (1)] в направлении трехмерной камеры [фиг. 1, (2)] дают трехмерной камере [фиг. 1, (2)] возможность идентифицировать маяк [фиг. 1, (1)] из числа всех других точек регистрации в своем поле зрения. Для этого необходимо, чтобы маяк [фиг. 1, (1)] возвращал световой сигнал, более интенсивный, чем простое пассивное отражение света сигнала, излученного трехмерной камерой [фиг. 1, (2)]. Трехмерная камера [фиг. 1, (2)], предпочтительно, закреплена на движущемся устройстве [фиг. 1, (4)], подлежащем автоматическому управлению, или встроена в него. Маяк [фиг. 1, (1)], осуществляющий связь с камерой, может быть единственным или может представлять собой часть группы из нескольких маяков [фиг. 3, (1)], размещенных по маршруту движущегося устройства. Маяки [фиг. 3, (1)] могут крепиться и размещаться заранее по заранее заданному маршруту. Кроме того, они, в зависимости от конкретных видов использования движущегося устройства, могут распределяться случайным образом или могут двигаться.
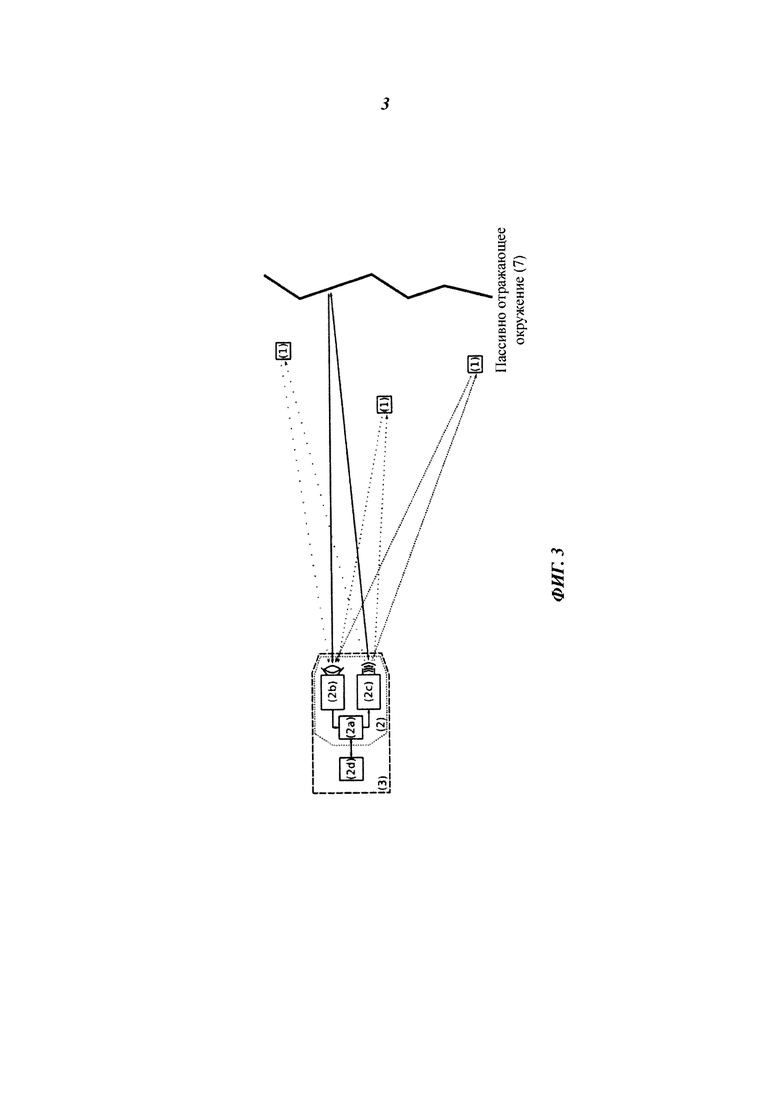
В соответствии с настоящим изобретением маяк [фиг. 1, (1)] выполнен с возможностью модуляции сигнала, излучаемого трехмерной камерой [фиг. 1, (2)], до передачи, что позволяет трехмерной камере [фиг. 1, (2)] точно идентифицировать природу маяка [фиг. 1, (1)]. В случае, когда в поле зрения устройства находятся несколько маяков [фиг. 3, (1)], каждый из маяков [фиг. 3, (1)] модулирует световой сигнал уникальным и характерным образом. Трехмерная камера [фиг. 3, (2)] тогда может идентифицировать и точного определить положение в трехмерном пространстве каждого маяка [фиг. 3, (1)] в своем поле зрения.
В предпочтительном варианте осуществления световые сигналы излучаются в ближнем инфракрасном диапазоне.
В еще одном предпочтительном варианте осуществления световым сигналом из первого излучателя является характеристическая последовательность импульсов.
В еще одном предпочтительном варианте осуществления маяк дополнительно содержит систему анализа сигнала, излучаемого первым излучателем, и базу данных, обеспечивающую хранение характеристик сигнала, излучаемого первым излучателем.
В еще одном предпочтительном варианте осуществления модуляция сигнала, переизлучаемого маяком, включает определенную задержку перед переизлучением светового сигнала в направлении трехмерной камеры.
В еще одном предпочтительном варианте осуществления модуляция сигнала, переизлучаемого маяком, включает заранее заданную последовательность нескольких последовательных задержек, изменяющуюся при каждом новом старте получения кадра трехмерной камеры.
В еще одном предпочтительном варианте осуществления модуляция сигнала, переизлучаемого маяков, включает изменение длин волн.
В еще одном предпочтительном варианте осуществления трехмерная камера дополнительно выполнена с возможностью соединения с базой данных, обеспечивая возможность распознавания модуляции сигнала, переизлучаемого маяками.
В еще одном предпочтительном варианте осуществления трехмерная камера дополнительно содержит средства связи, выполненные с возможностью передачи одной или более команд в один или более маяков.
Применение этой системы [фиг. 1, (3)] управления также является предметом настоящего изобретения. Примерами такого применения может быть наблюдение зон, требующих внимательного и постоянного активного мониторинга. Наблюдение может осуществляться сверху, например, с использованием одного или нескольких беспилотных летательных аппаратов. Наблюдение также может вестись с земли. Такие зоны, как, например, железнодорожные линии, дорожные сети или городские территории могут контролироваться, предпочтительно, автономными устройствами, например, беспилотными летательными аппаратами, оснащенными системой управления в соответствии с настоящим изобретением. Закрытые пространства, например, больницы, заводы или производственные зоны, в том числе движущиеся машины, также могут быть оснащены устройством, являющимся предметом настоящего изобретения. В последнем случае движения машин, оборудованных маяками [фиг. 1, (1)], обнаруживаются и анализируются с использованием трехмерной камеры [фиг. 1, (2)]. Еще одним возможным применением является отслеживание запасов материальных ценностей, в котором элементы, подлежащие отслеживанию, оснащаются маяками [фиг. 3, (1)], содержащими информацию, которая способна быть индивидуальной для каждого из элементов, и в котором система [фиг. 3, (3)] управления и ведения позволяет отслеживать их движения, местоположение, длительность их хранения и любую другую собираемую информацию, требуемую для управления запасами материальных ценностей. Устройство, являющееся предметом настоящего изобретения, также может использоваться для измерений в городской среде, например, для измерения расстояния между зданиями, для измерения размеров и занятого пространства инфраструктурных сооружений или для наблюдения за конструкционной целостностью зданий по мере их старения, в том числе измерения просадки, сдвига, наклона, деформации конструкций. Еще одним примером применения может быть определение положения и размещение движущихся транспортных средств вблизи заданного транспортного средства. Непрерывный активный мониторинг окружения при этом дает возможность избежать случайных столкновений.
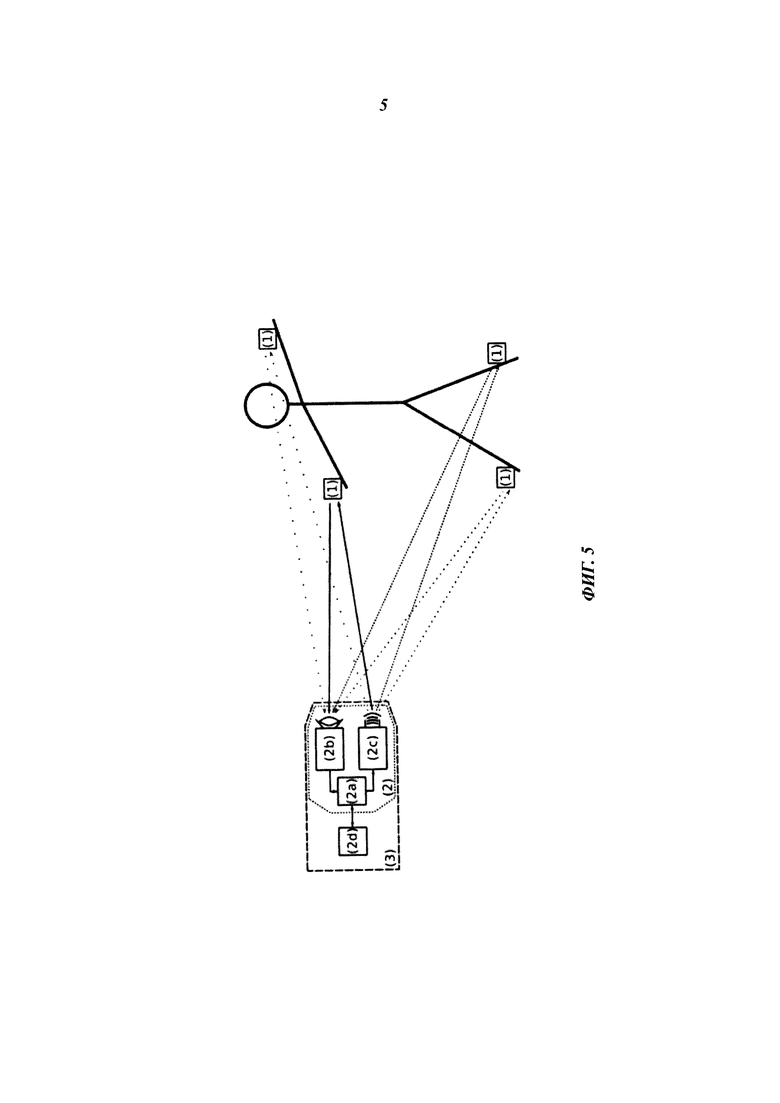
В одном варианте устройство, являющееся предметом настоящего изобретения, также может быть использовано для автоматического управления двумя или более транспортными средствами [фиг. 4, (5а, b)] таким образом, чтобы они следовали одно за другим. В этом случае маяк [фиг. 4, (1)], установленный или встроенный в заднюю часть одного транспортного средства [фиг. 4, (5b)], может осуществлять связь с системой [фиг. 4, (3)] ведения и управления, установленной или встроенной в переднюю часть другого транспортного средства [фиг. 4, (5а)], так что второе транспортное средство имеет возможность следовать с поддержанием расстояния за первым путем использования информации [фиг. 4, (6)] о расстоянии и направлении, получаемой с использованием настоящего изобретения. Настоящее изобретение также может быть установлено на транспортных средствах, управляемых человеком, для автоматического картографирования или привязки к местности. Еще одним примером применения устройства в соответствии с настоящим изобретением является автоматическое обнаружение движений человека [фиг. 5]. Движущийся человек может нести один или несколько маяков [фиг. 5, (1)], надлежащим образом размещенных в различных местоположениях на теле, при этом возможно измерение сигналов этих маяков [фиг. 5, (1)], переизлучаемых в направлении трехмерной камеры [фиг. 5, (2)], расположенной на держателе, внешнем по отношению к движущемуся человеку. Данный способ может быть с пользой применен для создания анимации, для научного анализа движений в спорте, для целей коррекции или повторного обучения двигательным навыкам или для любой другой деятельности, требующей обнаружения и/или поэлементного анализа движений.
В еще одном аспекте настоящее изобретение предлагает систему для маркировки объекта, который может представлять общественный интерес, при этом человек или машина, заинтересованные в указанном объекте, оснащены трехмерной камерой, соединенной с компьютерными средствами, причем система дополнительно содержит маяк, выполненный с возможностью идентификации себя посредством кода, уникального в окружении, представляющем интерес, тем самым обеспечивая возможность человеку или машине, заинтересованным в указанном объекте, идентифицировать указанный объект и принять метаинформацию об указанном объекте.
Фактически система [фиг. 1, (3)] ведения и управления настоящего изобретения содержит средства ведения или способ [фиг. 1, (2)] для трехмерной камеры [фиг. 1, (2)].
Однако приведенные применения представляют собой лишь неограничивающие примеры, и любое применение, основанное на использовании системы в соответствии с настоящим изобретением, также является предметом настоящего изобретения.
В соответствии с еще одним аспектом, настоящее изобретение также предлагает способ автоматического управления движущимся устройством, включающий следующие шаги:
a) излучение сигнала в направлении маяка трехмерной камерой, основанной на времяпролетной технологии, при этом трехмерная камера включена в систему управления и ведения;
b) прием сигнала маяком и переизлучение немодулированного сигнала или модулированного сигнала в направлении трехмерной камеры; и
c) прием и анализ трехмерной камерой сигналов, переизлучаемых маяком.
В еще одном предпочтительном варианте осуществления сигнал, излучаемый в направлении маяка, представляет собой последовательность световых импульсов.
В еще одном предпочтительном варианте осуществления модуляция сигнала включает использование одной или более заранее определенных задержек.
В еще одном предпочтительном варианте осуществления модуляция включает характеристики маяка.
В еще одном предпочтительном варианте осуществления модуляция включает информацию, предназначенную для активирования или деактивирования функции движущегося устройства.
В еще одном предпочтительном варианте осуществления способ дополнительно включает излучение системой управления и ведения команд, предназначенных для маяка.
Краткое описание чертежей
Другие характеристики и преимущества настоящего изобретения подробно описываются далее со ссылкой на прилагаемые чертежи.
Фиг. 1: пример движущегося устройства [фиг. 1, (4)], оснащенного трехмерной камерой [фиг. 1, (2)], соединенной с микрокомпьютером [фиг. 1, (2d)] для анализа последовательности кадров и для предоставления базы данных или соединения с базой данных, осуществляющего связь с маяком [фиг. 1, (1)], переизлучающим модулированный соответствующим образом сигнал незамедлительно или с задержкой.
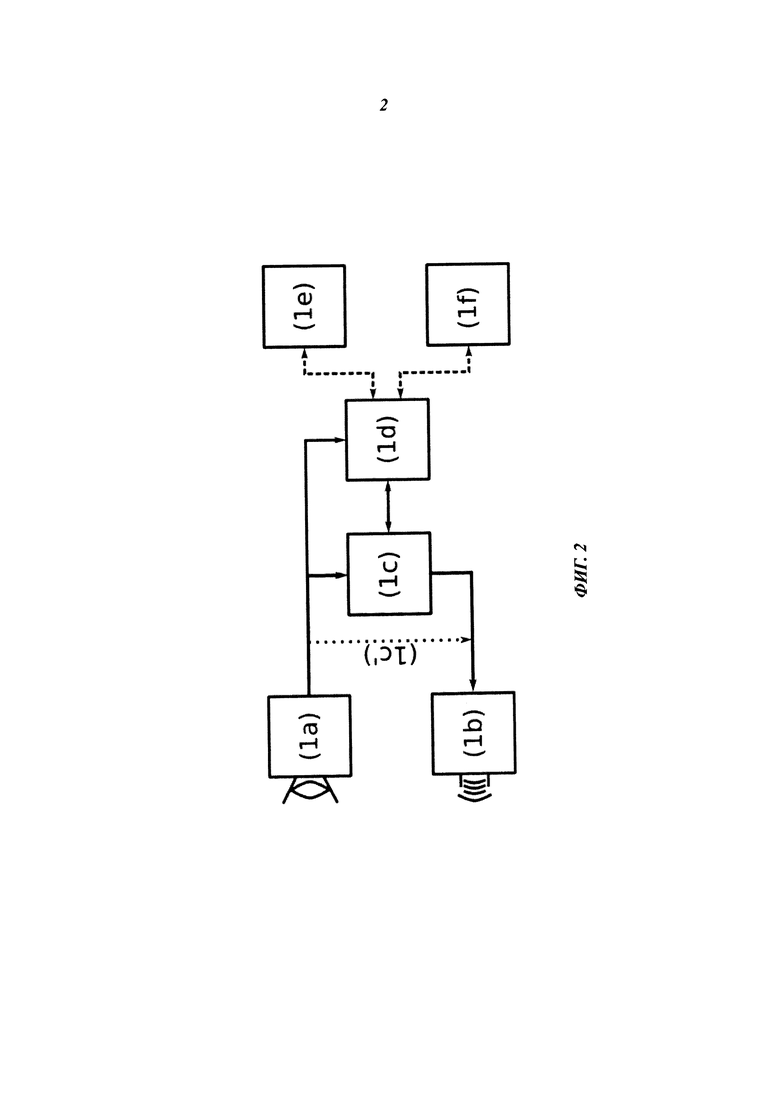
Фиг. 2: функциональную схема маяка [фиг. 1, (1)], содержащего приемник [фиг. 2, (1а)], согласованный со световым излучением трехмерной камеры [фиг. 1, (2)], преобразующий этот световой сигнал в электронный сигнал; излучатель [фиг. 2, (1b)] света, предпочтительно согласованный с диапазоном длин волн, воспринимаемым трехмерной камерой [фиг. 1, (2)], преобразующий электронный сигнал в соответствующий световой сигнал; средства направления электронного сигнала из приемника [фиг. 2, (1а)] в излучатель [фиг. 2, (1b)] без модуляции [фиг. 2, (1с')] или с модуляцией [фиг. 2, (1с)]; и компьютер [фиг. 2, (1d)], выполненный с возможностью управления модулем [фиг. 2, (1с) или (1с')] модуляции и с возможностью анализа сигнала, принятого приемником [фиг. 2, (1а)]. Маяк [фиг. 2, (1a, b, c, d)] может содержать внутреннюю или внешнюю базу данных [фиг. 2, (1е)], в которой хранится информация об идентификации маяка [фиг. 2, (1a, b, c, d)] или любая другая статическая или динамическая информация, представляющая интерес, подлежащая передаче в трехмерную камеру [фиг. 1, (2)] или сравнению с информацией, принятой из трехмерной камеры [фиг. 1, (2)], и один или множество внутренних или внешних датчиков или исполнительных устройств [фиг. 2, (1f)], измерения или действия которых представляют интерес для передачи в систему ведения и управления [фиг. 1, (3)], или которые могут действовать по команде, принятой системой ведения и управления [фиг. 1, (3)].
Фиг. 3: система [фиг. 3, (3) и (1)] ведения и управления, содержащая трехмерную камеру [фиг. 3, (2)], соединенную с компьютером [фиг. 3, (2d)] для анализа последовательности кадров и доступа к базе данных, а также множество маяков [фиг. 3, (1)] и пассивно отражающий фон или окружение в поле зрения трехмерной камеры [фиг. 3, (2)].
Фиг. 4: система [фиг. 4, (3) и (1)] ведения и управления, содержащая трехмерную камеру [фиг. 4, (2а, b, с)], соединенную с компьютером [фиг. 4, (2d)] для анализа последовательности кадров и доступа к базе данных, установленную или встроенную в транспортное средство [фиг. 4, (5а)], и по меньшей мере один маяк [фиг. 4, (1)], установленный или встроенный в заднюю часть по меньшей мере одного или более транспортного средства [фиг. 4, (5b)], причем система [фиг. 4, (3)] ведения и управления обеспечивает данные расстояния и направления [фиг. 4, (6)] транспортного средства (средств) в поле зрения трехмерной камеры [фиг. 4, (2)], обеспечивая либо поддержку водителя, либо автоматическую реализацию упорядоченного следования транспортных средств по типу дорожного поезда.
Фиг. 5: система [фиг. 5, (3)] ведения и управления в соответствии с настоящим изобретением, используемая для отслеживания движений человека путем прикрепления маяков [фиг. 5, (1)] к представляющим интерес движущимся частям и измерения направления и расстояния каждого маяка [фиг. 5, (1)] с использованием системы [фиг. 5, (3)] ведения и управления.
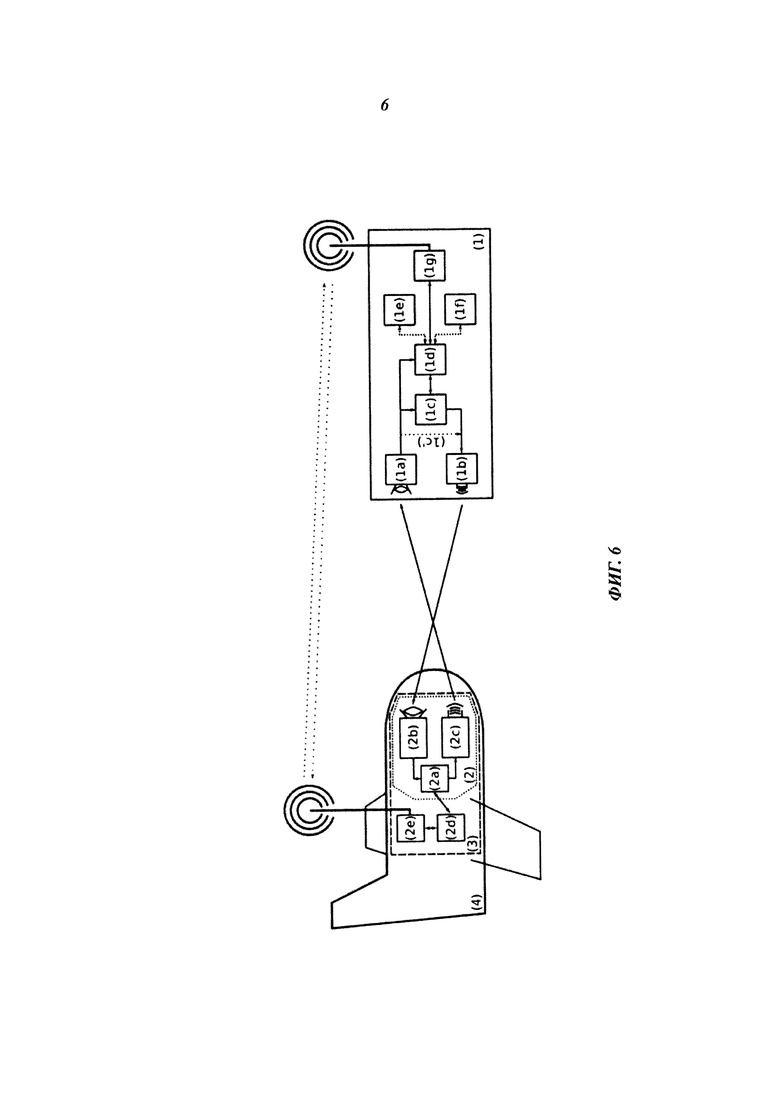
Фиг. 6: система [фиг. 6, (3)] ведения и управления со средствами связи с маяком [фиг. 6, (1)], включающая модуляцию времени между последовательными регистрациями кадров трехмерной камерой [фиг. 6, (2)] с целью реализации возможности передачи информации, закодированной посредством этой модуляции, в направлении маяка [фиг. 6, (1)]. В еще одном варианте осуществления передача информации из системы [фиг. 6, (3)] ведения и управления в направлении маяка [фиг. 6, (1)] реализуется посредством соединенного с компьютером [фиг. 6, (2d)] системы ведения и управления передатчика или приемопередатчика [фиг. 6, (2е)], который может работать либо в радиочастотном диапазоне, либо в оптическом диапазоне, или посредством любого средства, использующего пригодные для этой цели технологии передачи данных. Приемник или приемопередатчик маяка [фиг. 6, (1g)] согласован с излучением передатчика или приемопередатчика [фиг. 6, (2е)] системы ведения и управления и выполнен с возможностью одностороннего приема информации из системы ведения и управления [фиг. 6, (3)] или двустороннего осуществления связи с этой системой.
Осуществление изобретения
Система [фиг. 1, (3)] ведения и управления настоящего изобретения основана на использовании трехмерной камеры [фиг. 1, (2)], оснащенной излучателем световых сигналов [фиг. 1, (2с)], и по меньшей мере одного маяка [фиг. 1, (1)], выполненного с возможностью идентификации световых сигналов трехмерной камеры [фиг. 1, (2)] и с возможностью излучения такого же или другого светового сигнала (сигналов) в направлении трехмерной камеры [фиг. 1, (2)].
Световой сигнал (сигналы), переизлучаемый маяком [фиг. 1, (1)] в направлении трехмерной камеры [фиг. 1, (2)], согласован с характеристиками трехмерной камеры [фиг. 1, (2)], что дает камере возможность обнаруживать, анализировать и распознавать указанный сигнал. Источник света в трехмерной камере [фиг. 1, (2)] выполнен с возможностью излучения света, видимого или невидимого глазом человека. В последнем случае использование света с длиной волны более 780 нм, невидимого глазом человека, обеспечивает преимущество, состоящее в отсутствии помех от окружающих источников света, а также в том, что такой свет не беспокоит людей и не создает помех другим системам получения изображений, работающим в видимом диапазоне длин волн. На практике предпочтительно, чтобы излучатель [фиг. 1, (2с)] трехмерной камеры [фиг. 1, (2)] излучал свет в инфракрасном диапазоне, при этом с целью отстройки от каких-либо тепловых излучений предпочтительно, чтобы излучатель [фиг. 1, (2с)] излучал свет в ближнем инфракрасном диапазоне. Соответственно, свет излучается, предпочтительно, в диапазоне между 750 нм и 1000 нм, более предпочтительно, в диапазоне между 800 нм и 900 нм. Однако трехмерная камера [фиг. 1, (2)] сохраняет работоспособность в более широких диапазонах длин волн, например, при длинах волн до 2000 нм или более. Трехмерная камера [фиг. 1, (2)] может без утраты основной функциональности быть модифицирована таким образом, чтобы она излучала световые импульсы в соответствии с характеристической и, возможно, повторяющейся последовательностью, служащей в качестве кода или в качестве идентификационного ключа. Маяк [фиг. 1, (1)], соответственно, снабжен базой данных [фиг. 2, (1е)], содержащей идентификационный ключ или код, излучаемый модифицированной указанным образом трехмерной камерой [фиг. 1, (2)]. Таким образом, маяк обладает возможностью идентификации трехмерной камеры [фиг. 1, (2)].
Излучатель [фиг. 1, (2с)] и приемник [фиг. 1, (2b)] световых сигналов вместе с управляющим и обрабатывающим компьютером [фиг. 1, (2а)] представляют собой неотъемлемую часть трехмерной камеры, работающей на основе времяпролетного принципа, и являются коммерчески выпускаемыми изделиями.
Маяк [фиг. 1, (1)] излучает в ответ свет, который может быть обнаружен трехмерной камерой [фиг. 1, (2)]. Маяк [фиг. 1, (1)], предпочтительно, излучает свет в том же спектральном диапазоне, в котором находится свет, излучаемый трехмерной камерой [фиг. 1, (2)]. В идеале маяк [фиг. 1, (1)] излучает на той же длине волны (длинах волн), что и трехмерная камера [фиг. 1, (2)]. Последовательность световых импульсов, принятая маяком [фиг. 1, (1)], как правило, сохраняется при обратной передаче в направлении трехмерной камеры [фиг. 1, (2)]. Последовательность переизлучаемого света модифицируется, т.е. модулируется. Трехмерная камера [фиг. 1, (2)], оснащенная средствами вычисления задержки между излучаемым светом и принимаемым светом [фиг. 1, (2а)], обладает возможностью измерения расстояния, отделяющего ее от маяка [фиг. 1, (1)]. Как правило, в воздухе в наружных условиях задержка порядка одной наносекунды соответствует длине пути порядка тридцати сантиметров. При этом расстояние, отделяющее трехмерную камеру [фиг. 1, (2)] от маяка [фиг. 1, (1)], измеряется как порядка пятнадцать сантиметров, т.е. половина полного пути, который проходит свет от излучения до приема трехмерной камерой [фиг. 1, (2)]. Расстояние может быть вычислено с использованием различных средств для вычисления расстояния. В специальном режиме для вычисления расстояния трехмерная камера [фиг. 1, (2)] посылает световой импульс и измеряет задержку, с которой принят сигнал, переизлученный пассивно отражающими объектами в ее поле зрения, а также активно отраженный сигнал одного или множества маяков [фиг. 1, (1) и фиг. 3, (1)]. Эта задержка напрямую зависит от расстояния, отделяющего трехмерную камеру [фиг. 1, (2)] от объектов в поле зрения камеры и, соответственно, от маяка [фиг. 1, (1)], как описано выше. В еще одном варианте использования трехмерная камера [фиг. 1, (2)] излучает непрерывный сигнал с амплитудной или фазовой модуляцией и измеряет разность фаз модуляции сигнала, принятого обратно от объектов в поле зрения камеры и, соответственно, от маяка [фиг. 1, (1)]. Еще один вариант измерения расстояния состоит в излучении трехмерной камерой [фиг. 1, (2)] серии сигналов специального математического типа или кода и их автокоррелировании с временным сдвигом с соответствующей серией сигналов, переизлученных от объектов в поле зрения камеры и, соответственно, от маяка [фиг. 1, (1)]. Задержка приема, соответствующая временному сдвигу, использованному перед автокоррелированием этой серии сигналов, прямо пропорциональна расстоянию, отделяющему маяк [фиг. 1, (1)] от трехмерной камеры [фиг. 1, (2)].
Как правило, в трехмерной камере [фиг. 1, (2)] также определяется расстояние до неактивного объекта [фиг. 3, (7)], т.е. отличного от маяка [фиг. 3, (1)], переизлучающего световой сигнал активным образом. Такое определение имеет место, в частности, при пассивном отражении сигнала трехмерной камеры [фиг. 1, (2)] от отражающей поверхности. При этом могут использоваться описанные выше способы определения расстояния.
Пикселя трехмерной камеры [фиг. 1, (2)] достаточно для идентификации маяка [фиг. 1, (1)], что является преимуществом, поскольку требует использования лишь очень небольших вычислительных ресурсов и, вследствие ограниченного потребления ресурсов и сниженного времени обработки сигналов, сохраняет очень хорошее время реакции. В зарегистрированных последовательных кадрах, полученных с использованием трехмерной камеры [фиг. 1, (2)] и маяка [фиг. 1, (1)] в поле зрения и в диапазоне трехмерной камеры [фиг. 1, (2)] по меньшей мере один пиксель, соответствующий маяку [фиг. 1, (1)], в каждом новом кадре, снятом трехмерной камерой [фиг. 1, (2)], будет появляться на разных расстояниях. Последовательность изменяющихся расстояний может содержать кодированную, уникальную информацию идентификации маяка [фиг. 1, (1)] или другие данные, предоставленные маяком [фиг. 1, (1)]; информация идентификации извлекается и анализируется компьютером [фиг. 1, (2d)] системы ведения и управления [фиг. 1, (3)].
В одном варианте трехмерная камера [фиг. 1, (2)] может быть оснащена экраном. Одновременно могут быть размещены несколько маяков [фиг. 3, (1)]. В этом случае каждый из маяков активирует в последовательных зарегистрированных кадрах, снятых трехмерной камерой [фиг. 1, (2)], другой пиксел, и после извлечения и анализа компьютером [фиг. 1, (2d)] системы ведения и управления [фиг. 1, (3)] принимает форму группы точек.
В соответствии с одним конкретным аспектом осуществления, средства излучения трехмерной камеры [фиг. 1, (2с)] и маяка [фиг. 2, (1b)] представляют собой светоизлучающие диоды, или светодиоды (LED), излучающие в ближнем инфракрасном диапазоне на указанных выше длинах волн. Как вариант, могут использоваться лазерные диоды или поверхностно излучающие диодные лазеры с вертикальным резонатором (VCSEL, vertical-cavity surface-emitting laser). В зависимости от конкретных потребностей средства излучения трехмерной камеры [фиг. 1, (2)] могут излучать в диапазонах длин волн, включающих ближний инфракрасный диапазон, а также выходящих за пределы ближнего инфракрасного диапазона, например, в диапазоне от 750 до 2000 нм. В зависимости от конкретных потребностей средства излучения трехмерной камеры [фиг. 1, (2)] могут излучать в других диапазонах длин волн, включая или исключая ближний инфракрасный диапазон. В частности, указанное излучение может быть в видимом диапазоне и не ограничиваться узкополосным излучением, а охватывать части видимого спектра или весь видимый спектр и даже выходить за его пределы. К примеру, источником такого излучения может быть фара транспортного средства, свет которой модулируется и используется, в дополнение к основному применению для освещения, трехмерной камерой [фиг. 1, (2)], что обеспечивает возможность формирования системой [фиг. 1, (3)] ведения и управления трехмерного представления освещенной области без необходимости использования отдельного источника света для трехмерной камеры [фиг. 1, (2)].
Средства приема сигналов, переизлученных маяком [фиг. 1, (1)], размещенные в трехмерной камере [фиг. 1, (2)], в идеале представляют собой фотонный датчик типа КМОП или ПЗС, или фотодиод любого типа, или фототранзистор. Также возможно сочетание нескольких датчиков. Аналогично могут быть использованы другие активные датчики, работающие в используемом диапазоне длин волн. Приемник, размещенный на маяке [фиг. 2, (1а)], предпочтительно, представляет собой приемник типа фотодиода, фотоумножителя или лавинного диода. Однако в устройстве, являющемся предметом настоящего изобретения, подобным образом может быть использован любой приемник, обеспечивающий возможность преобразования светового сигнала в электрический сигнал. В маяк [фиг. 2] может быть встроено несколько приемников, выполненных с возможностью одновременного или попеременного функционирования в зависимости от применений указанной системы. Используемые в этом случае приемники [фиг. 2, (1а)] могут быть избирательно чувствительными к определенному диапазону длин волн или к конкретной длине волны.
В конкретном варианте осуществления маяк [фиг. 2] переизлучает световой сигнал, принятый трехмерной камерой [фиг. 1, (2)], без задержки или модуляции [фиг. 1, без модуляции], или переизлучает сигнал после модуляции [фиг. 1, с модуляцией]. Указанные модулированный и немодулированный сигналы переизлучаются с интенсивностью, большей, чем при простом естественном отражении от поверхности корпуса маяка [фиг. 2]. Переизлучение модулированного сигнала может происходить одновременно или поочередно с переизлучением немодулированного сигнала. Указанные модулированный и немодулированный сигналы также могут образовывать объект данной последовательности и повторяться однократно или несколько раз. Повторение указанных последовательностей в данном случае соответствует частоте регистрации кадров трехмерной камерой [фиг. 1, (2)], то есть количеству новых полных наборов точек данных, выдаваемых трехмерной камерой [фиг. 1, (2)] в секунду.
В предпочтительном режиме работы трехмерная камера [фиг. 1, (2)] выполняет регистрацию значительно быстрее измеряемого движения, что позволяет создавать последовательность из двух или более последовательных регистраций или кадров до того, как произойдет значительное изменение измеряемых расстояний до объектов, находящихся в поле зрения трехмерной камеры [фиг. 1, (2)].
Таким образом, маяк [фиг. 1, (1)] оснащен средствами [фиг. 2, (1c, d)] модуляции сигнала до переизлучения указанного сигнала. С этой целью маяк [фиг. 1, (1)] оснащен приемником [фиг. 2, (1а)], согласованным по длине волны и временной структуре с излучением из трехмерной камеры [фиг. 1, (2)] и преобразующим принятый сигнал в электронный сигнал. Этот электронный сигнал затем модулируется посредством электронного модулятора [фиг. 2, (1с)], управляемого встроенным компьютером [фиг. 2, (1d)]. Этот встроенный компьютер [фиг. 2, (1d)] также может использоваться для анализа электронного сигнала для того, чтобы иметь возможность должным образом реагировать на последовательность, излучаемую трехмерной камерой [фиг. 1, (2)], и этот компьютер может иметь доступ к базе данных [фиг. 2, (1е)], в которой сохранена информация о маяке [фиг. 2], или к внешнему регистрирующему устройству, присоединенному к маяку [фиг. 2, (1е)]. После модуляции электронный сигнал подвергается обратному преобразованию и излучается в диапазоне длин волн приема трехмерной камеры [фиг. 1, (2)] посредством оптического излучателя [фиг. 2, (1b)]. Это излучение может соответствовать длине волны, воспринимаемой трехмерной камерой [фиг. 1, (2)], и временной структуре света, ожидаемой камерой, но не ограничено указанными параметрами.
Модуляция сигнала может состоять, например, в использовании перед переизлучением сигнала серии заранее определенных задержек длительностью порядка нескольких наносекунд, сохраненных в базе [фиг. 2, (1е)] данных, находящейся в маяке или соединенной с маяком. Указанные задержки переизлучения могут сравниваться компьютером [фиг. 1, (2d)] системы [фиг. 1, (3)] ведения и управления, соединенным с трехмерной камерой [фиг. 1, (2)], со значениями, сохраненными в базе данных [фиг. 1, (1е)], являющейся частью системы [фиг. 1, (3)] ведения и управления или соединенной с указанной системой. Таким образом, система [фиг. 1, (3)] ведения и управления выполнена с возможностью идентификации маяка [фиг. 1, (1)]. В предпочтительном варианте функционирования трехмерная камера [фиг. 1, (2)] выполняет по меньшей мере две последовательных регистрации сигнала, переизлучаемого маяком [фиг. 1, (1)]. Сочетание переизлучения без задержки и переизлучения с задержкой обеспечивает для трехмерной камеры [фиг. 1 (2)] возможность измерения изменяющегося видимого расстояния, которое отделяет указанную камеру от маяка [фиг. 1, (1)], и при этом возможность идентификации маяка [фиг. 1, (1)] с использованием компьютера [фиг. 1, (2d)] системы [фиг. 1, (3)] ведения и управления. База данных, с которой соединена система [фиг. 1, (3)] ведения и управления, может быть, например, в форме электронной микросхемы, однако в зависимости от видов использования устройства могут применяться и другие средства дистанционного или локального хранения данных. База данных также может быть встроена в компьютер [фиг. 1, (2d)] системы [фиг. 1, (3)] ведения и управления.
В конкретном варианте осуществления маяк [фиг. 1, (1)] выполнен с возможностью применения переменной задержки до переизлучения светового сигнала. Изменение указанной задержки может быть случайным или может следовать заранее заданной схеме, реализуемой встроенным компьютером [фиг. 2, (1d)] и сохраняемой во внутренней или во внешней базе данных [фиг. 2, (1е)]. В случае заранее заданного изменения задержек маяк [фиг. 1, (1)] может, например, переизлучать сигнал в соответствии со следующей последовательностью:
прием сигнала → переизлучение без задержки → переизлучение с задержкой 1 → переизлучение с задержкой 2 → переизлучение с задержкой 3…
Вышеприведенная последовательность может выполняться однократно или несколько раз. Указанная последовательность также может повторяться циклически заранее заданное число раз. Указанная последовательность может содержать множество меняющихся задержек, предпочтительно, 2-50 различных задержек, меняемых в соответствии с заранее заданным порядком. Указанная последовательность также может содержать одну или более задержек, повторяемых однократно или несколько раз.
Последовательность «задержка 1 → задержка 2 → задержка 3 → задержка n…», где n - количество использованных задержек, представляет код, который может быть распознан компьютером [фиг. 1, (2d)] системы [фиг. 1, (3)] ведения и управления, соединенным с трехмерной камерой [фиг. 1, (2)] благодаря своей базе данных. Этот заранее заданный код дает маяку [фиг. 1, (1)] возможность передачи определенной информации в систему [фиг. 1, (3)] ведения и управления. Информацией, передаваемой посредством последовательности задержек, могут быть просто характеристики маяка [фиг. 1, (1)], осуществляющего связь с системой [фиг. 1, (3)] ведения и управления. В этом случае переизлучаемый сигнал служит индивидуальной подписью («отпечатком пальца») маяка [фиг. 1, (1)] и дает возможность коррекции видимого положения в реальное положение благодаря тому, что задержка, использованная маяком [фиг. 1, (1)], известна и сохранена в базе данных, являющейся частью системы [фиг. 1, (3)] ведения и управления. Указанная информация может, кроме того, содержать сообщение иного характера, например, команду, инструкцию, сообщение об опасности или любую другую информацию, относящуюся к использованию устройства. Эти дополнительные элементы информации, излучаемые маяком [фиг. 1, (1)], могут быть результатом самостоятельных измерений, выполняемых маяком [фиг. 1, (1)], или могут быть получены датчиком, соединенным с маяком [фиг. 2, (1f)]. Эти элементы также могут быть заранее переданы в маяк [фиг. 6, (1)] с использованием подходящих средств [фиг. 6, (2е) и (1g)] связи, например, системы Wi-Fi, радиосвязи, инфракрасной связи или каких-либо других средств передачи информации.
Могут быть использованы трехмерные камеры [фиг. 1, (2)], основанные на времяпролетном принципе, например, имеющиеся в продаже. Трехмерная камера [фиг. 1, (2)], использованная в настоящем изобретении, в идеале выполнена с возможностью работы при частоте кадров по меньшей мере несколько десятков кадров в секунду, хотя в некоторых применениях концепция настоящего изобретения может использоваться и при меньшей частоте кадров.
В конкретном варианте осуществления система [фиг. 1, (3)] ведения и управления на борту движущегося устройства [фиг. 1, (4)] оснащена средствами доставки команд этого устройства [фиг. 1, (4)]. Соответственно, указанная система может влиять на траекторию устройства [фиг. 1, (4)] в зависимости от информации, переизлучаемой маяками [фиг. 1, 1]. В случае наблюдения зоны по заранее заданному маршруту информация, переданная маяком [фиг. 1, (1)], может быть использована, например, для направления аппарата к следующему маяку [фиг. 1, (1)], или, как вариант, к другому маяку [фиг. 1, (1) или фиг. 3, (1)] на маршруте. В случае системы предупреждения столкновений информация, переданная маяком [фиг. 1, (1)], может быть использована, например, для остановки устройства [фиг. 1, (4)] при достижении расстоянием до идентифицированного маяка [фиг. 1, (1)] определенного предельного значения. Понятно, что любая команда, имеющая целью изменение траектории устройства [фиг. 1, (4)], может быть передана путем изменения модуляции светового сигнала. Также возможны команды, имеющие целью активирование или деактивирование определенных функций устройства [фиг. 1, (4)]. Например, при приближении к конкретному маяку [фиг. 1, (1)] можно активировать или деактивировать камеру видеонаблюдения. Указанным образом в соответствии с конкретным применением устройства [фиг. 1, (4)] может осуществляться управление любыми другими функциями устройства [фиг. 1, (4)]. Такими функциями, например, может быть наблюдение с использованием камеры или обработка посевов сверху зоны произрастания, или активация картографической или топологической системы, активация и/или выключение звукозаписывающей системы или системы анализа воздуха или иного компонента или свойства среды. Функции автономного устройства [фиг. 1, (4)] могут быть направлены не только на решение задач обеспечения безопасности, например, наблюдение или сдерживание, но также и на решение научных задач, в которых необходимо выполнять специальные и/или регулярные измерения, задач разведки или изыскания, задач акустического, теплового или гиперспектрального картографирования, или задачи сопровождения людей беспилотным летательным аппаратом и съемки этих людей на ходу, в том числе и съемки селфи - одним из представляющих интерес свойств является способность беспилотного летательного аппарата оставаться на постоянном расстоянии от маяка, находящегося у человека, а также, возможно, и инициировать фотографирование всякий раз, когда объект съемки оказывается в поле зрения. Устройство также может быть оснащено звуковой, визуальной или радиопередающей системой оповещения или любой другой системой оповещения, управляемой маяками [фиг. 1, (1) и фиг. 3, (1)] в соответствии с вышеописанным способом.
Автономное устройство [фиг. 1, (4)], оснащенное системой [фиг. 1, (3)] ведения и управления в соответствии с настоящим изобретением, может быть использовано на открытом воздухе или в закрытом пространстве, например, в ангаре, в выставочном зале, в туннеле или в ином ограниченном пространстве.
В еще одном конкретном варианте осуществления последовательность задержек, используемых маяком [фиг. 1, (1)], является случайной, в результате чего передаваемая информация не понимается трехмерной камерой [фиг. 1, (2)]. Маяк [фиг. 1, (1)] в этом случае используется в качестве системы постановки помех или маскировки, предпочтительно, с излучателем маяка [фиг. 1, (1)], излучающим в направлении приемника трехмерной камеры [фиг. 1, (2b)] при уровнях мощности, превосходящих уровни мощности излучения пассивно отражающих объектов, находящихся в поле зрения трехмерной камеры [фиг. 1, (2)].
Как указано выше, модуляция светового сигнала маяком [фиг. 1, (1)] может осуществляться путем использования задержки или последовательности задержек. Как вариант, модуляция может состоять в изменении длин волн переизлучаемого сигнала относительно принятого сигнала. Аналогично использованию задержек, длины волн, принятых трехмерной камерой [фиг. 1, (2)], могут сравниваться с базой данных; указанным образом возможна передача информации, воспринимаемой системой [фиг. 1, (3)] ведения и управления. Указанные изменения длин волн могут быть однократными или многостадийными. Также может использоваться несколько изменений длин волн, предпочтительно, в соответствии с заранее заданной схемой, однократных или многостадийных. Изменение (изменения) длины волны может сочетаться или не сочетаться с использованием задержки или последовательности задержек. Когда активны несколько маяков [фиг. 3, (1)], каждый из маяков [фиг. 3, (1)] может использовать режим модуляции, независимый от других маяков [фиг. 3, (1)]. Соответственно, система ведения и управления [фиг. 1, (3)] выполнена с возможностью распознавания модуляции длины волны, применяемой одним маяком [фиг. 3, (1)], и модуляции путем использования определенной задержки, применяемой другим маяком [фиг. 3, (1)].
В соответствии с предпочтительным вариантом использования трехмерная камера [фиг. 1, (2)] нечувствительна к сигналу, излучаемому ей самой, и воспринимает только сигналы, переизлучаемые маяком [фиг. 1, (1)] или маяками [фиг. 3, (1)], находящимися в поле зрения трехмерной камеры, но не детали окружающей обстановки, отражающие лишь пассивно, без изменения длины волны. Маяк [фиг. 1, (1)], соответственно, должен излучать в диапазоне длин волн, к которым чувствительна трехмерная камера [фиг. 1, (2)]. В результате становится возможным обнаружение, идентификация и определение местоположения маяков [фиг. 3, (1)], как и прием любой дополнительной информации, переизлучаемой маяками [фиг. 3, (1)].
В еще одном конкретном варианте осуществления система [фиг. 1, (3)] ведения и управления, являющаяся предметом настоящего изобретения, дает трехмерной камере [фиг. 1, (2)] возможность передачи информации в конкретный маяк [фиг. 3, (1)]. Система [фиг. 6, (3)] ведения и управления соединена со средствами [фиг. 6, (2е)] связи, которые могут быть таким же или отличными от средств излучения, описанных выше, и которые дают системе [фиг. 6, (3)] ведения и управления возможность передачи определенных команд в маяк [фиг. 6, (1)]. В частности, трехмерная камера [фиг. 1, (2)] может быть оснащена источником [фиг. 1, (2с)] света, излучающим на длине волны, не относящейся к ближнему инфракрасному диапазону. Как вариант, указанная система может быть соединена со средствами [фиг. 6, (2е)] излучения, работающими на радиочастотах, к примеру, со средствами излучения типа wi-fi, или каким-либо иными средствами связи, обеспечивающими возможность передачи команд в маяк [фиг. 6, (1)]. В одном конкретном варианте использования компьютер системы [фиг. 6, (2d)] ведения и управления может определенным образом менять задержку между двумя измерениями, выполняемыми трехмерной камерой [фиг. 6, (2)]. Таким образом, характерная структура задержек или времен, используемая системой [фиг. 6, (3)] ведения и управления при излучении светового сигнала, содержит или представляет код, распознаваемый маяком [фиг. 6, (1)]. Код, соотнесенный с конкретной структурой задержек или времен, используемой системой [фиг. 6, (3)] ведения и управления, соответствует команде, переданной в маяк [фиг. 6, (1)]. В этом конкретном варианте команды могут передаваться в маяк [фиг. 6, (1)] одновременно с его идентификацией системой [фиг. 6, (3)] ведения и управления. Маяк [фиг. 6, (1)] оснащен пригодными для этой цели средствами приема, которыми может быть фотовольтаический или фоточувствительный датчик [фиг. 6, (1а)], радиоприемник [фиг. 6, (1а)], приемник wi-fi или какой-либо другой приемник или детектор, обеспечивающий возможность приема или анализа сигнала, излучаемого системой [фиг. 6, (3)] ведения и управления. Это дает системе [фиг. 6, (3)] ведения и управления возможность одновременно позиционировать маяк [фиг. 1, (1)] в поле зрения трехмерной камеры [фиг. 6, (2)] и передать команды или данные в маяк. Примерами команд, возвращаемых системой [фиг. 6, (3)] ведения и управления в маяк [фиг. 6, (1)], могут быть команды для включения или выключения маяка [фиг. 6, (1)]. В зависимости от конкретных применений, указанной командой может быть команда изменения модуляции сигнала маяком [фиг. 6, (1)]. По этой причине сигнал, излучаемый маяком [фиг. 6, (1)], может измениться после состоявшейся связи маяка с системой [фиг. 6, (3)] ведения и управления. Маяк [фиг. 6, (1)] может фактически менять индивидуальную подпись или менять команды, предназначенные или для системы [фиг. 6, (3)] ведения и управления, или для системы [фиг. 6, (3)] ведения и управления при следующем проходе, или менять индивидуальную подпись и команды одновременно.
Настоящее изобретение фактически представляет собой систему, или средства, или устройство, или способ ведения маяков [фиг. 1, (1)] системой [фиг. 1, (3)] ведения и управления, содержащей трехмерную камеру [фиг. 1, (2)] и компьютер [фиг. 1, (2d)] для анализа последовательных кадров, извлекающий закодированные сообщения от маяка [фиг. 1, (1)] из потока данных трехмерной камеры [фиг. 1, (2)]. Оно также представляет собой систему, или средства, или устройство, или способ управления автономным движущимся устройством [фиг. 1, (4)]. Более конкретно, настоящее изобретение также относится к способу ведения и/или управления, включающему следующие шаги:
а) излучение сигнала в направлении маяка [фиг. 1, (1)] трехмерной камерой [фиг. 1, (2)], основанной на времяпролетной технологии, при этом трехмерная камера включена в систему управления и ведения;
b) прием сигнала маяком [фиг. 1, (1)] и переизлучение немодулированного сигнала [фиг. 1, (1с')] или модулированного сигнала в направлении трехмерной камеры [фиг. 1, (2)];
c) прием и анализ трехмерной камерой [фиг. 1, (2)] сигналов, переизлучаемых маяком [фиг. 1, (1)];
d) по меньшей мере однократное выполнение шагов а)-с);
e) анализ переизлученных сигналов путем сопоставления с базой данных с использованием компьютера [фиг. 1, (3)] системы [фиг. 1, (3)] ведения и управления;
f) выполнение какой-либо команды.
Шаг d) необходим в случае, когда маяк [фиг. 1, (1)] использует при модуляции сигнала различные задержки.
Настоящее изобретение также представляет собой систему, или средства, или устройство для связи между двумя или более географически разнесенными объектами. В предпочтительном варианте осуществления по меньшей мере один из объектов находится в движении. В этой системе, или средствах, или устройстве связи информация, передаваемая объектами или обмен которой осуществляется между объектами, предназначена для автоматического управления движущимся объектом, непосредственно или опосредованно. Более конкретно, протокол связи содержит следующие фазы:
a) излучение сигнала из трехмерной камеры [фиг. 1, (2)] в направлении маяка [фиг. 1, (1)];
b) прием сигнала маяком [фиг. 1, (1)] и переизлучение немодулированного сигнала или модулированного сигнала в направлении трехмерной камеры [фиг. 1, (2)];
c) прием трехмерной камерой [фиг. 1, (2)] сигналов, переизлученных маяком [фиг. 1, (1)];
d) по меньшей мере однократное выполнение шагов а)-с);
e) анализ переизлученных сигналов путем сопоставления с базой данных с использованием компьютера [фиг. 1, (3)] системы [фиг. 1, (3)] ведения и управления;
f) выполнение каких-либо команд.
Шаг d) необходим в случае, когда маяк [фиг. 1, (1)] использует при модуляции сигнала различные задержки.
Средства связи, являющиеся предметом настоящего изобретения, образованы системой [фиг. 1, (3)] ведения и управления в соответствии с вышеприведенным описанием и одним или более маяком [фиг. 1, (1) или фиг. 3, (1)] в соответствии с вышеприведенным описанием. Дополнительным шагом в протоколе связи может быть передача команд из системы [фиг. 1, (3)] ведения и управления в направлении маяка [фиг. 1, (1)]. Передача команд из системы [фиг. 1, (3)] ведения и управления в направлении маяка [фиг. 1, (1)] может выполняться до идентификации маяка [фиг. 1, (1)] или после нее. Команды также могут передаваться одновременно с идентификацией маяка [фиг. 1, (1)] системой ведения и управления [фиг. 1, (3)].
Еще одним предметом настоящего изобретения является реализация способа управления, в котором сигнал, излучаемый трехмерной камерой [фиг. 1, (2)] в направлении маяка [фиг. 1, (1)], представляет собой последовательность инфракрасных импульсов, в идеале создаваемую таким устройством, как, например, инфракрасный диод (типа светодиода, лазера или поверхностно излучающего диодного лазера с вертикальным резонатором (VCSEL)). В способе управления настоящего изобретения сигнал переизлучается маяком [фиг. 1, (1)] в соответствии с вышеописанными вариантами. В этом случае предпочтительное осуществление данного способа управления включает незамедлительное переизлучение сигнала, сочетающееся с переизлучением после заранее определенной задержки в следующем регистрируемом кадре трехмерной камеры [фиг. 1, (2)]. Переизлучение сигнала выполняется, предпочтительно, в соответствии с характеристической последовательностью, которая может содержать несколько различных задержек и служит индивидуальной подписью («отпечатком пальца») маяка [фиг. 1, (1)], и, кроме того, может содержать информацию, адресованную в бортовую систему [фиг. 1, (3)] ведения и управления. Способ, описанный в настоящем документе, допускает, в свою очередь, возможную передачу команд, адресованных в маяк [фиг. 1, (1)], в соответствии с вышеописанными вариантами.
Настоящее изобретение включает устройство [фиг. 1, (4)], оснащенное вышеописанной системой или управляемое в соответствии со способом, описанным в настоящем документе. Указанным устройством [фиг. 1, (4)] может быть автономное транспортное средство, движущееся в воздухе, например, беспилотный летательный аппарат, или по земле, например, транспортное средство, или по воде, например, корабль. Настоящее изобретение также включает производственную машину, оснащенную устройством [фиг. 1, (3)] обнаружения и управления, описанным в настоящем документе. Настоящее изобретение также включает средства для оснащения человека [фиг. 5] или животного, движения которых анализируются посредством устройства, являющемся предметом настоящего изобретения То, что устройство является автономным или автоматическим, означает, что в нем нет человека, осуществляющего управление, и что его средства управления являются автоматическими. Кроме того, система, описанная в настоящем документе, может быть использована в дополнение к управлению, осуществляемому человеком, для содействия или обеспечения безопасности [фиг. 4]. Такая ситуация имеет место, например, когда данная система используется в качестве системы предотвращения столкновений на управляемом человеком транспортном средстве. В соответствии с приведенными здесь применениями, таким аппаратом может быть беспилотный летательный аппарат, робот, машина или любое другое механическое устройство, предназначенное для перемещения. Настоящее изобретение также может использоваться для маркировки или отслеживания статических или подвижных объектов, которые могут представлять общественный интерес, к примеру, произведений искусства, или может использоваться в местах, где идентификация объектов представляет интерес для оптимизации определенных действий или процедур, примером чего является отслеживание объектов на складах. Человек или машина, заинтересованные в этих объектах, должны быть оснащены трехмерной камерой [фиг. 1, (2)], соединенной с компьютерными средствами, аналогичными микрокомпьютеру [фиг. 1, (2d)], которые могут содержаться, к примеру, в смартфоне или ручном устройстве какого-либо другого типа, или содержаться в самой машине или роботе. Маяк [фиг. 1, (1)] идентифицирует себя кодом, уникальным в представляющем интерес месте или даже в мировом масштабе. Это дает человеку или машине, имеющим интерес к объекту, возможность идентификации данного объекта и приема метаинформации об этом объекте. Для реализации такой возможности трехмерная камера [фиг. 1, (2)] может (но не обязательно) быть соединена с базой данных, осуществляющей привязку метаинформации и содержащей эту метаинформацию. При отсутствии соединения с базой данных информация об объекте может полностью сохраняться и передаваться маяком [фиг. 1, (1)]. Эта информация может обновляться в реальном времени, к примеру, с использованием данных с датчиков, соединенных с маяком [фиг. 2, (1f)].

Группа изобретений относится к системе динамического ведения (отслеживания) положения движущегося (динамического) объекта, способу автоматического управления движущимся устройством, применениям системы и автоматическому транспортному средству, оснащенному такой системой. Система содержит трехмерную камеру, приемник, приемник световых излучений, излучатель световых сигналов, микрокомпьютер, внутренний или внешний вспомогательный компьютер, маяк. Способ включает излучение сигнала в направлении маяка, прием сигнала маяком и переизлучение немодулированного сигнала или модулированного сигнала в направлении трехмерной камеры, прием и анализ трехмерной камерой сигналов, переизлучаемых маяком. Обеспечивается идентификация движущегося устройства времяпролетной камерой. 6 н. и 18 з.п. ф-лы, 6 ил.
1. Система динамического ведения для определения пространственного положения движущегося объекта, содержащая
- трехмерную камеру (2), основанную на времяпролетной технологии, содержащую
приемник, чувствительный к световым излучениям, лежащим в определенном диапазоне длин волн,
первый излучатель световых сигналов (2с),
микрокомпьютер (2а), обеспечивающий взаимодействие и обрабатывающий трехмерную информацию, поступающую из приемника (2b), а также управляющий излучателем (2с), и
внутренний или внешний вспомогательный компьютер (2d), включающий средства анализа данных, сервисы базы данных, управления и внешнего взаимодействия с транспортным средством и локальными или глобальными сервисами обмена данными;
- маяк (1), чувствительный к световым сигналам, излучаемым первым излучателем (2с) световых сигналов трехмерной камеры (2), причем этот маяк оснащен вторым излучателем световых сигналов (1b) с длиной волны, согласованной с чувствительностью трехмерной камеры (2); при этом
маяк (1) содержит средства модуляции световых сигналов (1c, c', d), излучаемых первым излучателем световых сигналов (2с),
трехмерная камера выполнена с возможностью измерения времени возврата сигнала, переизлучаемого маяком,
модуляция реализована таким образом, чтобы обеспечивалась возможность уникальной идентификации и одновременного определения положения маяка (1) в трехмерном объеме, охватываемом полем зрения трехмерной камеры (2), посредством трехмерной камеры и по меньшей мере двух зарегистрированных кадров,
а уникальная идентификация маяка (1) выполняется в микрокомпьютере путем анализа видимого расстояния до маяка в последовательных кадрах трехмерной камеры (2).
2. Система по п. 1, отличающаяся тем, что световые сигналы излучаются в ближнем инфракрасном диапазоне.
3. Система (3) по любому из предшествующих пунктов, отличающаяся тем, что световым сигналом из первого излучателя является характеристическая последовательность импульсов (2).
4. Система (3) по любому из предшествующих пунктов, отличающаяся тем, что маяк (1) дополнительно содержит систему (1a, c, d) анализа сигнала, излучаемого первым излучателем (2), и базу данных (1е), обеспечивающую хранение характеристик сигнала, излучаемого первым излучателем (2).
5. Система (3) по любому из предшествующих пунктов, отличающаяся тем, что модуляция сигнала, переизлучаемого маяком (1), включает определенную задержку перед переизлучением светового сигнала в направлении трехмерной камеры (2).
6. Система (3) по любому из предшествующих пунктов, отличающаяся тем, что модуляция сигнала, переизлучаемого маяком (1), включает заранее заданную последовательность нескольких последовательных задержек, изменяющуюся при каждом новом старте получения кадра трехмерной камеры (2).
7. Система (3) по любому из предшествующих пунктов, отличающаяся тем, что модуляция сигнала, переизлучаемого маяком (1), включает изменение длин волн.
8. Система (3) по любому из предшествующих пунктов, отличающаяся тем, что трехмерная камера (2) дополнительно выполнена с возможностью соединения с базой данных (2а), обеспечивая возможность распознавания модуляции сигнала, переизлучаемого маяками (1).
9. Система (3) по любому из предшествующих пунктов, отличающаяся тем, что трехмерная камера (2) дополнительно содержит средства связи, выполненные с возможностью передачи одной или более команд в один или более маяков.
10. Способ автоматического управления движущимся устройством (4), характеризующийся тем, что включает следующие шаги:
a) излучение сигнала в направлении маяка (1) трехмерной камерой (2), основанной на времяпролетной технологии, при этом трехмерная камера включена в систему управления и ведения;
b) прием сигнала маяком (1) и переизлучение немодулированного (1с') сигнала или модулированного сигнала в направлении трехмерной камеры (2); и
с) прием и анализ трехмерной камерой (2) сигналов, переизлучаемых маяком (1).
11. Способ по п. 10, отличающийся тем, что сигнал, излучаемый в направлении маяка (1), представляет собой последовательность световых импульсов.
12. Способ по п. 10 или 11, отличающийся тем, что модуляция сигнала (1c, c', d) включает использование одной или более заранее определенных задержек.
13. Способ по п. 12, отличающийся тем, что модуляция (1c, c', d) включает характеристики маяка (1).
14. Способ по любому из пп. 10-13, отличающийся тем, что модуляция (1c, c', d) включает информацию, предназначенную для активирования или деактивирования функции движущегося устройства (4).
15. Способ по любому из пп. 11-14, отличающийся тем, что дополнительно включает излучение системой (3) управления и ведения команд, предназначенных для маяка (1).
16. Применение системы по любому из пп. 1-9 для управления беспилотным летательным аппаратом или роботом.
17. Применение по п. 16, отличающееся тем, что управление беспилотным летательным аппаратом или роботом включает активирование и/или деактивирование определенных команд беспилотного летательного аппарата.
18. Применение системы по любому из пп. 1-9 для активного мониторинга с целью предотвращения столкновений.
19. Применение по п. 18, отличающееся тем, что маяки (1) закреплены на других движущихся транспортных средствах или встроены в другие движущиеся транспортные средства.
20. Применение по п. 18 или 19, отличающееся тем, что активный мониторинг с целью предотвращения столкновений дополнительно включает активацию оповещения и/или остановку транспортного средства.
21. Применение системы по любому из пп. 1-9, в котором маяк (1) служит для постановки помех или для маскировки.
22. Применение по п. 20, отличающееся тем, что постановка помех включает случайную модуляцию, такую, что сигнал, переизлучаемый маяком (1), не распознается системой (3) управления и ведения.
23. Автоматическое транспортное средство, оснащенное системой по любому из пп. 1-9 или управляемое способом по любому из пп. 10-15.
24. Транспортное средство по п. 23, отличающееся тем, что маяк установлен на задней части транспортного средства и выполнен с возможностью осуществления связи с системой по любому из пп. 1-9, установленной на передней части второго транспортного средства, так что второе транспортное средство имеет возможность следовать с поддержанием расстояния за транспортным средством путем использования информации о расстоянии и направлении, предоставляемой системой.
| US 20120124113 A1, 17.05.2012 | |||
| US 6266142 B1, 24.07.2001 | |||
| WO 2013120041 A1, 15.08.2013 | |||
| US 4559597 A1, 17.12.1985 | |||
| ОПТИЧЕСКИЙ ДАЛЬНОМЕР | 1999 |
|
RU2155322C1 |

