Группа изобретений относится к области подводной навигации и может быть использована для определения координат группы подводных объектов, преимущественно подводников и подводных пловцов при отработке совместных действий в бассейне или водолазной башне.
Для определения координат подводных объектов существуют различные методы. В патенте US 7512036 В2, МПК G01S 3/80, опубл. 31.03.2009 координаты пловца определяют с помощью известной акустической системы навигации с длинной базой, основанной на использовании трех буев, оснащенных приемниками глобальной системы позиционирования (Global Positioning System, GPS). Расположение буев ограничивает район подводных работ.
Известна система определения координат подводных объектов по патенту RU 2437114 С1, МПК G01S 3/80, опубл. 20.12.2011, которая может быть использована при определении географических координат группы подводных объектов, таких как подводных пловцы, управляемые и неуправляемые подводные устройства, морские животных.
Система содержит буи в количестве не менее грех, расположенных на поверхности моря с расстоянием между ними в 1-3 километра, которые принимают сигналы гидроакустических излучателей (гидрофонов) подводных объектов.
Расчет координат производится на основе вычисления расстояний, определенных гидроакустическим методом с измерением времени запаздывания гидроакустического сигнала корреляционным приемником-демодулятором буев относительно излучаемой гидрофоном подводных объектов синхропосылки заданного вида. При этом подводные объекты снабжают высокостабильными часами, предварительно синхронизированными по часам GPS. Излучение гидрофона производится в предустановленный момент времени, синхронный с ходом часов и различный для каждого подводного объекта. Сигнал от определенного объекта принимается корреляционным приемником-демодулятором буев, где с помощью контроллера-измерителя временных интервалов рассчитывается время запаздывания до каждого буя. Далее каждый буй с помощью радиомодема передает эти времена по радиоканалу на станцию контроля, где ЭВМ по известному алгоритму вычисляет координаты определенного объекта и выводит их на дисплей.
Недостатком системы по патенту RU 2437114 С1 является необходимость иметь на каждом подводном объекте высокостабильные часы, предварительно синхронизированные по часам GPS.
Кроме того, ввиду специфики геометрии водолазной башни, представляющей собой цилиндр малой длины и диаметра с гладкими твердыми стенками, применение гидроакустических систем определения координат подводных объектов затруднено наличием многочисленных мощных паразитных отражений.
Из уровня техники известны способы определения трехмерных координат объектов по видеопоследовательностям от двух видеокамер наблюдения, при этом оптические оси видеокамер могу быть параллельны или произвольно ориентированы. Известные способы оценивания трехмерных координат некоторой точки включают: определение внутренних параметров камер (задача калибровки), определение параметров взаимного расположения камер (задача взаимного ориентирования), определение на изображениях координаты соответствующих данной точке сопряженных точек (задача поиска сопряженных точек) (см., например, Цифровая обработка изображений в информационных системах: Учеб. пособие / И.С. Грузман, B.C. Киричук и др. - Новосибирск: Изд-во НГТУ, 2002. Глава 6. Фотограмметрия и стереовидение. С. 168-185).
В качестве прототипа для способа и устройства принята система управления роботизированным объектом по патенту RU 139478 U1, МПК B25J 19/00, опубл 20.04.2014, которая реализует способ определения трехмерных координат объектов по видеопоследовательностям от двух видеокамер наблюдения и включает две синхронно работающие цифровые видеокамеры и компьютер с установленным на нем программным обеспечением. Видеокамеры размещены стационарно на расстоянии друг от друга и их оптические оси взаимно ориентированы в направлении окружающего роботизированный объект пространства. Программное обеспечение компьютера обеспечивает возможность получения трехмерного изображения окружающего объект пространства и контроля текущего положения роботизированного объекта. Роботизированный объект маркирован контрольными элементами, обеспечивающими возможность однозначного определения координат его текущего положения относительно подстилающей поверхности стереограмметрическими методами с помощью видеокамер и программного обеспечения компьютера. Контрольные элементы выполнены в виде, по меньшей мере, двух светодиодов, расположенном на каждом контролируемом элементе. Идентификация положения объекта по легко детектируемым контрольным светодиодам позволяет значительно упростить и повысить точность позиционирования и разгрузить вычислительную систему. Однако система по патенту RU 139478 U1 не обеспечивает идентификацию и позиционирование группы подвижных объектов в водной среде.
В основу настоящей группы изобретений положена задача создать способ позиционирования группы объектов в ограниченном водном объеме и систему для его осуществления, которые позволили бы обеспечить идентификацию и непрерывное определение координат и параметров движения группы подводных объектов, в том числе и при частичном взаимном перекрытии объектов.
Применительно к способу задача решается тем, что в способе позиционирования группы подводных объектов в ограниченном водном объеме, включающем установку оптических маяков на каждом из объектов, излучение оптическими маяками объектов сигналов, приеме в разнесенных пунктах приема сигналов, по которым производят идентификацию и вычисляют координаты и параметры движения объектов, согласно изобретению, фиксируют излучения оптических маяков объектов с помощью четырех видеокамер, расположенных на концах взаимно перпендикулярных осевых линий горизонтального сечения контролируемого объема, инициацию излучения оптических маяков осуществляют с помощью излучаемого по меньшей мере одним излучателем-инициатором в оптическом диапазоне волн сигнала, длительность которого равна длительности видеокадра Δt, период следования которого равен T=Δt*(N+1), где N - количество объектов в группе, а начало излучения синхронизировано с импульсами кадровой синхронизации видеокамер, в качестве идентифицирующего признака объекта используют предустановленный номер видеокадра, в котором оптический маяк данного объекта излучает сигнал, выделяют видеопоследовательности в видеокадрах, соответствующих каждому идентифицированному объекту, по которым вычисляют координаты и параметры движения каждого объекта, при этом количество оптических маяков и места их расположения на подводном объекте выбирают из условия обеспечения непрерывного наблюдения по крайней мере двумя видеокамерами.
Технический результат в способе достигается также тем, что:
количество излучателей-инициаторов выбирают равным четырем и устанавливают их в местах расположения видеокамер;
оптический маяк излучает сигналы в ближнем ультрафиолетовом и/или в ближнем инфракрасном диапазоне волн;
излучатель-инициатор излучает сигналы в ближнем инфракрасном диапазоне волн;
в качестве сигнала излучателя-инициатора используют кодированный сигнал с амплитудной модуляцией последовательностью импульсов;
длительность сигнала излучателя-инициатора соответствует длительности видеокадра;
обработку видеоинформации с видеокамер производят на вычислительном комплексе, расположенном в пункте контроля за действиями подводных объектов вне контролируемого водного объема.
Применительно к системе задача решается тем, что система позиционирования группы подводных объектов в ограниченном водном объеме, содержащая в пункте контроля вычислительный комплекс с программой идентификации объектов, вычисления и отображения координат и параметров движения объектов на устройстве отображения, установленные в разнесенных пунктах приема видеокамеры для приема сигналов оптических маяков, которыми снабжены объекты группы, согласно изобретению, содержит синхронизатор, четыре видеокамеры, которые работают в режиме покадровой синхронизации и размещены на концах взаимно перпендикулярных осевых линий горизонтального сечения контролируемого водного объема, по крайней мере один излучатель-инициатор, который выполнен с возможностью излучения в оптическом диапазоне волн сигнала, длительность которого равна длительности видеокадра Δt, период следования равен Т=Δt*(N+1), где N - количество объектов в группе, а начало излучения синхронизировано с импульсами кадровой синхронизации видеокамер, оптические маяки выполнены с возможностью приема сигнала излучателя-инициатора и излучения сигнала в оптическом диапазоне волн в предустановленном номере видеокадра для каждого объекта, при этом раздельные выходы синхронизатора соединены с входами синхронизации видеокамер и излучателя-инициатора, сигнальные выходы видеокамер соединены с раздельными входами вычислительного комплекса, раздельные выходы которого соединены с входом устройства отображения и входом синхронизатора, а количество оптических маяков и места их расположения на подводном объекте выбирают из условия обеспечения непрерывного наблюдения по крайней мере двумя видеокамерами.
Технический результат в системе достигается также тем, что:
количество излучателей-инициаторов выбирают равным четырем и устанавливают их в местах расположения видеокамер;
оптический маяк излучает сигналы в ближнем ультрафиолетовом и/или в ближнем инфракрасном диапазоне волн;
излучатель-инициатор излучает сигналы в ближнем инфракрасном диапазоне волн;
в качестве сигнала излучателя-инициатора используют кодированный сигнал с амплитудной модуляцией последовательностью импульсов;
длительность сигнала излучателя-инициатора соответствует длительности видеокадра;
вычислительный комплекс, синхронизатор и устройство отображения расположены в пункте контроля за действием подводных объектов вне контролируемого водного объема.
Сущность изобретения поясняется чертежами, на которых представлены:
на фиг. 1 - структурная электрическая схема заявляемой системы позиционирования;
на фиг. 2 - временные диаграммы, поясняющие принцип функционирования заявляемого способа и системы;
на фиг. 3 - локальная система координат контролируемого водного объема;
на фиг. 4 - горизонтальное сечение контролируемого водного объема;
на фиг. 5 - вертикальное сечение контролируемого водного объема.
На фиг. 1-5 введены обозначения:
1 - подводные объекты;
11, 12, …, 1N - номера подводных объектов;
111, 121; …, 1NM - номера оптических маяков, расположенных на подводных объектах;
2 - видеокамеры;
21, 22, 23, 24 - номера камер;
3 - излучатели-инициаторы;
31, 32, 33, 34 - номера излучателей-инициаторов;
4 - пункт контроля;
5 - вычислительный комплекс;
6 - устройство отображения;
7 - синхронизатор;
8 - контролируемый водный объем;
9 - корпус водолазной башни.
Описание способа позиционирования группы подводных объектов в ограниченном водном объеме совместим с описанием системы для его осуществления.
Подводные объекты 1 находятся в ограниченном водном объеме, при этом водный объем может быть конструктивно ограничен, например, корпусом водолазной башни, стенками бассейна или определяться только расположением видеокамер. Вне контролируемого водного объем размещен пункт контроля 4, содержащий вычислительный комплекс 5, раздельные выходы которого соединены с входом устройства отображения бис входом синхронизатора 7. К раздельным входам вычислительного комплекса 5 подключены сигнальные выходы видеокамер 21-24, а раздельные выходы синхронизатора 7 соединены с входами синхронизации видеокамер 21-24 и с входами синхронизации излучателей-инициаторов 31-34.
Чертежи, иллюстрирующие заявляемый способ и устройство, представленные на фиг. 3 фиг. 5 приведены в качестве примера для контролируемого водного объема 8, ограниченного корпусом 9 цилиндрической водолазной башни с диаметром D. На чертежах изображен один объект 11 с координатами X11, Y11 и Z11.
Каждый из N объектов группы от 11 до 1N снабжен оптическими маяками 111, 121; …, 1NM, соответственно, количество которых и места их расположения на подводном объекте выбирают из условия обеспечения непрерывного наблюдения по крайней мере двумя видеокамерами. Например, для контроля подводного пловца предпочтительным является использование четырех оптических маяков, размещенных на спине, груди и плечах.
На концах взаимно перпендикулярных осевых линий X и Y горизонтального сечения контролируемого водного объема (см. фиг. 4) размещены четыре видеокамеры 21-24, с помощью которых ведется наблюдение за объектами, и четыре излучателя-инициатора 31-34. При углах А поля зрения видеокамер 2 в горизонтальной и вертикальной плоскости не менее 90°, такое расположение видеокамер обеспечивает наблюдение за каждым из объектов по крайней мере двумя видеокамерами с взаимно перпендикулярными осями, что является достаточным для определения координат объекта.
При диаграмме излучения В излучателей-инициаторов 3 в горизонтальной и вертикальной плоскости не менее 90°, такое расположение излучателей-инициаторов обеспечивает наличие излучаемого сигнала во всем контролируемом водном объеме.
При легко достижимых углах поля зрения видеокамер А=140° высота Н контролируемого водного объема при D=5 м составляет 13,7 м.
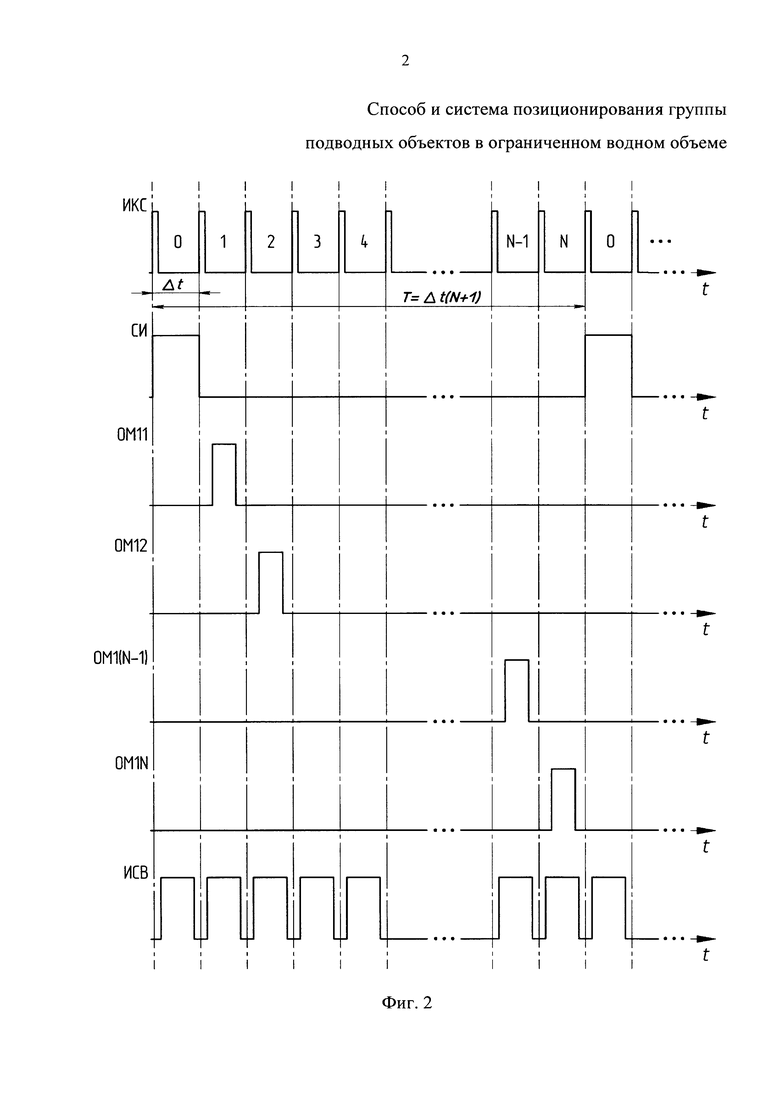
Функционирование способа и системы позиционирования группы объектов в ограниченном водном объеме поясняются временными диаграммами, которые приведены на фиг. 2, где обозначены:
ИКС - импульсы кадровой синхронизации;
СИ - сигнал излучателя-инициатора;
ОМ11, …, OM1N - сигналы оптических маяков объектов;
ИСВ - импульсы синхронизации видеокамер.
Видеокамеры 3 работают в покадровом режиме, который задается импульсами синхронизации видеокамер (ИСВ), поступающими от синхронизатора 7 на входы синхронизации видеокамер 2.
Излучатели-инициаторы 3 излучают в оптическом диапазоне волн сигналы СИ, длительность которого равна длительности видеокадра Δt, а период следования равен T=Δt*(N+1), где N - максимальное количество объектов в группе. Начало излучения излучателей-инициаторов 3 синхронизировано с ИКС видеокамер 2 и задается импульсами, поступающими от синхронизатора 7 на входы синхронизации излучателей-инициаторов 3.
В качестве сигнала излучателя-инициатора предпочтительно используют кодированный сигнал, например, сигнал с амплитудной модуляцией последовательностью импульсов.
Система позиционирования группы подводных объектов ограниченном водном объеме работает следующим образом.
Подводные объекты 1, оборудованные одним или несколькими оптическими маяками, находятся в контролируемом объеме. При этом они попадают в поле зрения видеокамер 2. Все оптические маяки выключены, видеокамеры не регистрируют отметок от них. Далее все четыре излучателя-инициатора 3 посылают кодированный оптический сигнал, соответствующий команде включения оптических маяков.
Фотоприемники оптических маяков всех объектов принимают и анализируют сигнал СИ. Оптические маяки 111…11М первого объекта 11 излучают сигналы ОМ 11 в первом видеокадре, потом во втором видеокадре излучают сигнал ОМ12 оптические маяки 121…12М второго объекта 12 и так далее до N-го объекта, затем цикл повторяется. Таким образом в качестве идентифицирующего признака объекта используют предустановленный номер видеокадра, в котором после приема сигнала излучателя-инициатора СИ оптические маяки данного объекта излучают сигнал ОМ.
Ввиду того, что все элементы системы, включая оптические маяки, видеокамеры и излучатели-инициаторы работают от сигналов СИ, работа системы синхронизирована и не требует наличия высокоточных часов. Оптические маяки соответствующей группы генерируют оптический импульс при попадании на их фотоприемные устройства внешнего оптического сигнала СИ. Достаточно того, чтобы длительность оптического импульса ОМ, генерируемого маяком, не превышала длительности видеокадра регистрирующей камеры.
В случае неполучения каким-либо оптическим маяком внешнего оптического сигнала СИ, например, из-за затенения его фотоприемного устройства при частичном взаимном перекрытии объектов, этот маяк не генерирует ответного сигнала ОМ. Тогда координаты объекта определяются по другим маякам, закрепленным на этом объекте. Более того, ввиду того, что информация о координатах обновляется с частотой F/N, где F - частота видеосъемки, и малых скоростях движения пловцов в водной среде, пропуск любого отсчета практически не сказывается на работе системы.
Для исключения воздействия оптического излучения на глаза подводных пловцов излучение сигналов как излучателей-инициаторов, так и оптических маяков выбирают на частотах, лежащих вне видимого диапазона волн, при этом оптические маяки в зависимости от оптических свойств воды излучают сигналы в предустановленных режимах: в ближнем ультрафиолетовом (длины волн 360-380 нм) и/или в ближнем инфракрасном диапазоне волн (длины волн 780-820 нм), а излучатель-инициатор излучает сигналы в ближнем инфракрасном диапазоне волн.
Ввиду того, что максимальное спектральное пропускание воды приходится на ближнюю ультрафиолетовую область спектра, для минимизации мощности излучения оптических маяков предпочтительно использовать в оптическом тракте системы источники с длинами волн 360-380 нм.
В последовательных видеокадрах видеокамер 2 появляются отметки от оптических маяков объектов 1 с последовательными номерами, что позволяет производить раздельную обработку видеопоследовательностей для каждого объекта. Обработку видеоинформации с видеокамер 2 производят на вычислительном комплексе 5 в локальной системе координат, связанной с видеокамерами, с последующим пересчетом в глобальную систему в строительных осях водолазной башни.
При наличии на объекте нескольких оптических маяков на изображении могут появиться отметки от одного или нескольких оптических маяков с разной яркостью. Для обработки выбирают отметку от оптического маяка объекта с наибольшей яркостью. Затем для каждого объекта сравнивают попарно изображения от четырех видеокамер и для дальнейшего определения координат объекта с минимальными ошибками выбирают пары видеокамер, у которых углы визирования объекта близки к 90°. Если таких пар видеокамер несколько, то усредняют координаты объекта, полученные от нескольких пар видеокамер. Вычисленные координаты и параметры движения каждого объекта группы отображаются на устройстве 6 отображения.
При использовании видеокамеры со скорости видеосъемки F=60 Гц и частоте обновления информации о координатах объектов равной 5 Гц, которая достаточна для вычисления параметров движения объектов, в контролируемом водном объеме может находиться одновременно до 11 объектов, по которым обеспечивается идентификация и непрерывное определение координат и параметров их движения.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА КОНТРОЛЯ СОСТОЯНИЯ ПОДВОДНЫХ ПЛОВЦОВ | 2010 |
|
RU2429159C1 |
| СИСТЕМА ОПРЕДЕЛЕНИЯ КООРДИНАТ ПОДВОДНЫХ ОБЪЕКТОВ | 2010 |
|
RU2437114C1 |
| СПОСОБ И СИСТЕМА ОБНАРУЖЕНИЯ ОБЪЕКТОВ ПРИ ГИДРОЛОКАЦИИ | 2007 |
|
RU2358289C1 |
| ГИДРОАКУСТИЧЕСКАЯ НАВИГАЦИОННАЯ СИСТЕМА | 2011 |
|
RU2463624C1 |
| СПОСОБ ИЗМЕРЕНИЯ РАССТОЯНИЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1996 |
|
RU2101730C1 |
| СПОСОБ ОБНАРУЖЕНИЯ ПОДВОДНЫХ ОБЪЕКТОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2004 |
|
RU2271551C2 |
| Способ навигации и позиционирования подводных объектов в глубоководном канале на больших дальностях и система для его осуществления | 2018 |
|
RU2674404C1 |
| СПОСОБ ПОЗИЦИОНИРОВАНИЯ ПОДВОДНЫХ ОБЪЕКТОВ | 2011 |
|
RU2469346C1 |
| Способ и система для навигационного обеспечения судовождения и определения координат | 2021 |
|
RU2773497C1 |
| СПОСОБ ОБНАРУЖЕНИЯ ПОДВОДНЫХ ОБЪЕКТОВ НА МОРСКОМ РУБЕЖЕ В МЕЛКОМ МОРЕ | 1999 |
|
RU2161319C1 |




Изобретение относится к области подводной навигации и может быть использовано для определения координат группы подводных объектов, преимущественно подводников и подводных пловцов при отработке совместных действий в бассейне или водолазной башне. Достигаемый технический результат - идентификация и непрерывное определение координат и параметров движения группы подводных объектов, в том числе и при частичном взаимном перекрытии объектов Указанный результат достигается тем, что на каждом из объектов устанавливают оптические маяки, количество которых и места их расположения на подводном объекте выбирают из условия обеспечения непрерывного наблюдения по крайней мере двумя видеокамерами. Фиксируют излучения оптических маяков объектов с помощью четырех видеокамер, расположенных на концах взаимно перпендикулярных осевых линий горизонтального сечения контролируемого объема. Инициацию излучения оптических маяков осуществляют с помощью излучаемого четырьмя излучателями-инициаторами в оптическом диапазоне волн сигнала, длительность которого равна длительности видеокадра Δt, период следования которого равен T=Δt*(N+1), где N - количество объектов в группе, а начало излучения синхронизировано с импульсами кадровой синхронизации видеокамер. В качестве идентифицирующего признака объекта используют предустановленный номер видеокадра, в котором оптический маяк данного объекта излучает сигнал. Выделяют видеопоследовательности в видеокадрах, соответствующих каждому идентифицированному объекту, по которым вычисляют координаты и параметры движения каждого объекта. Обработку видеоинформации с видеокамер производят на вычислительном комплексе, размещенном на пункте контроля за действиями подводных объектов вне контролируемого водного объема. 2 н. и 12 з.п. ф-лы, 5 ил.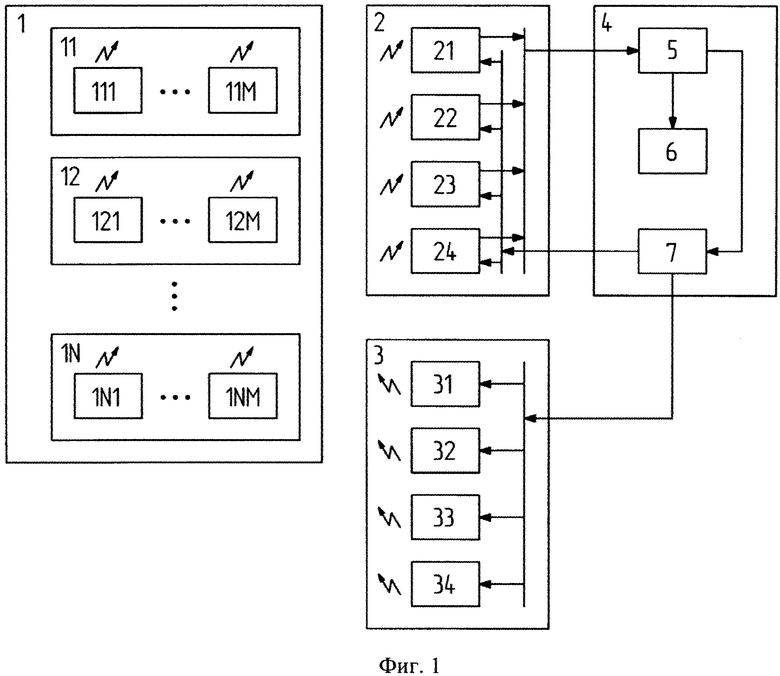
1. Способ позиционирования группы подводных объектов в ограниченном водном объеме, включающем установку оптических маяков на каждом из объектов, излучение оптическими маяками объектов сигналов, приеме в разнесенных пунктах приема сигналов, по которым производят идентификацию и вычисляют координаты и параметры движения объектов, отличающийся тем, что фиксируют излучения оптических маяков объектов с помощью четырех видеокамер, расположенных на концах взаимно перпендикулярных осевых линий горизонтального сечения контролируемого объема, инициацию излучения оптических маяков осуществляют с помощью излучаемого по меньшей мере одним излучателем-инициатором в оптическом диапазоне волн сигнала, длительность которого равна длительности видеокадра Δt, период следования которого равен T=Δt*(N+1), где N - количество объектов в группе, а начало излучения синхронизировано с импульсами кадровой синхронизации видеокамер, в качестве идентифицирующего признака объекта используют предустановленный номер видеокадра, в котором оптический маяк данного объекта излучает сигнал, выделяют видеопоследовательности в видеокадрах, соответствующих каждому идентифицированному объекту, по которым вычисляют координаты и параметры движения каждого объекта, при этом количество оптических маяков и места их расположения на подводном объекте выбирают из условия обеспечения непрерывного наблюдения по крайней мере двумя видеокамерами.
2. Способ по п. 1, отличающийся тем, что количество излучателей-инициаторов выбирают равным четырем и устанавливают их в местах расположения видеокамер.
3. Способ по п. 1, отличающийся тем, что оптический маяк излучает сигналы в ближнем ультрафиолетовом и/или в ближнем инфракрасном диапазоне волн.
4. Способ по п. 1, отличающийся тем, что излучатель-инициатор излучает сигналы в ближнем инфракрасном диапазоне волн.
5. Способ по п. 1, отличающийся тем, что в качестве сигнала излучателя-инициатора используют кодированный сигнал с амплитудной модуляцией последовательностью импульсов.
6. Способ по п. 1, отличающийся тем, что длительность сигнала излучателя-инициатора соответствует длительности видеокадра.
7. Способ по п. 1, отличающийся тем, что обработку видеоинформации с видеокамер производят на вычислительном комплексе, расположенном в пункте контроля за действиями подводных объектов вне контролируемого водного объема.
8. Система позиционирования группы подводных объектов в ограниченном водном объеме, содержащая в пункте контроля вычислительный комплекс с программой идентификации объектов, вычисления и отображения координат и параметров движения объектов на устройстве отображения, установленные в разнесенных пунктах приема видеокамеры для приема сигналов оптических маяков, которыми снабжены объекты группы, отличающаяся тем, что содержит синхронизатор, четыре видеокамеры, которые работают в режиме покадровой синхронизации и размещены на концах взаимно перпендикулярных осевых линий горизонтального сечения контролируемого водного объема, по крайней мере один излучатель-инициатор, который выполнен с возможностью излучения в оптическом диапазоне волн сигнала, длительность которого равна длительности видеокадра Δt, период следования равен T=Δt*(N+1), где N - количество объектов в группе, а начало излучения синхронизировано с импульсами кадровой синхронизации видеокамер, оптические маяки выполнены с возможностью приема сигнала излучателя-инициатора и излучения сигнала в оптическом диапазоне волн в предустановленном номере видеокадра для каждого объекта, при этом раздельные выходы синхронизатора соединены с входами синхронизации видеокамер и излучателя-инициатора, сигнальные выходы видеокамер соединены с раздельными входами вычислительного комплекса, раздельные выходы которого соединены с входом устройства отображения и с входом синхронизатора, а количество оптических маяков и места их расположения на подводном объекте выбирают из условия обеспечения непрерывного наблюдения по крайней мере двумя видеокамерами.
9. Система по п. 8, отличающаяся тем, что количество излучателей-инициаторов выбирают равным четырем и устанавливают их в местах расположения видеокамер.
10. Система по п. 8, отличающаяся тем, что оптический маяк излучает сигналы в ближнем ультрафиолетовом и/или в ближнем инфракрасном диапазоне волн.
11. Система по п. 8, отличающаяся тем, что излучатель-инициатор излучает сигналы в ближнем инфракрасном диапазоне волн.
12. Система по п. 8, отличающаяся тем, что в качестве сигнала излучателя-инициатора используют кодированный сигнал с амплитудной модуляцией последовательностью импульсов.
13. Система по п. 8, отличающаяся тем, что длительность сигнала излучателя-инициатора соответствует длительности видеокадра.
14. Система по п. 8, отличающаяся тем, что вычислительный комплекс, синхронизатор и устройство отображения расположены в пункте контроля за действием подводных объектов вне контролируемого водного объема.
| Масс-спектрометр | 1960 |
|
SU139478A1 |
| СИСТЕМА ОПРЕДЕЛЕНИЯ КООРДИНАТ ПОДВОДНЫХ ОБЪЕКТОВ | 2004 |
|
RU2303275C2 |
| СИСТЕМА ОПРЕДЕЛЕНИЯ КООРДИНАТ ПОДВОДНЫХ ОБЪЕКТОВ | 2010 |
|
RU2437114C1 |
| ПОДВОДНЫЙ РОБОТОТЕХНИЧЕСКИЙ КОМПЛЕКС | 2014 |
|
RU2563074C1 |
| US 6501704 B2, 31.12.2002 | |||
| JP 9145821 A, 06.06.1997 | |||
| US 4212258 A, 15.07.1980. | |||

