Область техники
[0001] Настоящее изобретение относится к способу управления и устройству управления для электрического транспортного средства.
УРОВЕНЬ ТЕХНИКИ
[0002] Традиционно известно устройство управления демпфированием вибрации для электрического транспортного средства, имеющее функцию устранения вибрации из–за кручения приводного вала путем вычисления значения команды крутящего момента электродвигателя с использованием системы управления с прямой связью-обратной связью, включающей в себя компенсатор с прямой связью (F/F) и компенсатор с обратной связью (F/B) (см. JP 2003–9566A).
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
[0003] Здесь система управления с обратной связью устройства управления демпфированием вибрации, раскрытого в JP 2003–9566A, оценивает угловую скорость вращения электродвигателя объекта управления с использованием модели транспортного средства, которая моделирует характеристику перехода от крутящего момента электродвигателя к угловой скорости вращения электродвигателя и вычисляет крутящий момент обратной связи на основе отклонения между оцененным значением и детектированным значением угловой скорости вращения электродвигателя.
[0004] Однако, поскольку описанная выше модель транспортного средства разработана на основе транспортного средства с приводом на два колеса, когда тормозная/движущая сила (тормозной/движущий крутящий момент) вводится с другого ведущего колеса, оцененное значение угловой скорости вращения электродвигателя, рассчитанное моделью транспортного средства, и фактическая угловая скорость вращения электродвигателя расходятся друг от друга. Следовательно, существуют случаи, когда для компенсации этого расхождения значение компенсации для подавления вибрации большее, чем необходимо, выводится из F/B–компенсатора, в результате чего не может быть получено ускорение или замедление, намеченное водителем.
[0005] Задачей настоящего изобретения является подавление вывода значения излишней компенсации для подавления вибрации из F/B–компенсатора, делая оцененное значение угловой скорости вращения электродвигателя и фактическую угловую скорость вращения электродвигателя совпадающими друг с другом, даже когда тормозная/движущая сила поступает от другого ведущего колеса.
[0006] Способ управления для электрического транспортного средства согласно одному варианту осуществления настоящего изобретения представляет собой способ для электрического транспортного средства, который устанавливает значение команды крутящего момента электродвигателя на основе информации транспортного средства и управляет крутящим моментом первого электродвигателя, соединенного с первым ведущим колесом, которое является одним из переднего ведущего колеса и заднего ведущего колеса. Способ управления для электрического транспортного средства устанавливает значение команды крутящего момента электродвигателя на основе информации транспортного средства и управляет крутящим моментом первого электродвигателя, соединенного с первым ведущим колесом, которое является одним из переднего ведущего колеса и заднего ведущего колеса. Способ управления для электрического транспортного средства вычисляет первое значение команды крутящего момента посредством вычисления с прямой связью на основе значения команды крутящего момента электродвигателя, детектирует угловую скорость вращения первого электродвигателя и оценивает угловую скорость вращения первого электродвигателя на основе первого значения команды крутящего момента с использованием модели Gp(s) транспортного средства, которая имитирует характеристику перехода от крутящего момента, вводимого на первое ведущее колесо, к угловой скорости вращения первого электродвигателя. Затем устройство управления вычисляет второе значение команды крутящего момента из отклонения между детектированным значением и оцененным значением угловой скорости вращения первого электродвигателя с использованием фильтра Hf(s)/Gp(s), состоящего из обратной характеристики модели Gp(s) транспортного средства и полосового фильтра Hf(s) с центральной частотой, близкой к частоте крутильной вибрации транспортного средства, управляет крутящим моментом первого электродвигателя в соответствии со значением команды переднего окончательного крутящего момента, полученным путем сложения первого значения команды крутящего момента и второго значения команды крутящего момента вместе и корректирует, когда вводится тормозной/движущий крутящий момент для второго ведущего колеса, являющегося ведущим колесом, отличным от первого ведущего колеса, оцененное значение угловой скорости вращения первого электродвигателя на основе тормозного/движущего крутящего момента. Эта коррекция вычисляет величину коррекции угловой скорости вращения электродвигателя, используя функцию перехода угловой скорости вращения первого электродвигателя для второго ведущего колеса, причем функция перехода смоделирована заранее, и корректирует оцененное значение угловой скорости вращения первого электродвигателя на основе величины коррекции угловой скорости вращения электродвигателя.
[0007] Далее подробно описаны варианты осуществления настоящего изобретения с прилагаемыми чертежами.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
[0008] Фиг. 1 является блок–схемой, иллюстрирующей системную конфигурацию (системную конфигурацию 1) электрического транспортного средства, к которому применяется устройство управления по настоящему изобретению;
Фиг. 2 является блок–схемой последовательности операций, иллюстрирующей последовательность процессов, выполняемых контроллером электродвигателя;
Фиг. 3 является диаграммой, иллюстрирующей один пример положения акселератора (степени открытия акселератора) – таблица крутящих моментов;
Фиг. 4 является блок–схемой, иллюстрирующей системную конфигурацию (системную конфигурацию 2) электрического транспортного средства, к которому применяется устройство управления по настоящему изобретению;
Фиг. 5 является блок–схемой последовательности операций, иллюстрирующей последовательность процессов, выполняемых контроллером электродвигателя;
Фиг. 6 является схемой, поясняющей процесс продольного распределения движущей силы;
Фиг. 7 является схемой, поясняющей уравнение движения транспортного средства с приводом на четыре колеса (4WD);
Фиг. 8 является блок–схемой конфигурации, которая реализует процесс вычисления управления демпфированием вибрации по первому варианту осуществления;
Фиг. 9 является временной диаграммой, иллюстрирующей один пример результатов управления, когда устройства управления первого, второго и четвертого вариантов осуществления применяются к электрическим транспортным средствам, и результаты управления согласно предшествующему уровню техники;
Фиг. 10 является блок–схемой конфигурации, которая реализует процесс вычисления управления демпфированием вибрации по второму варианту осуществления;
Фиг. 11 является блок–схемой конфигурации, иллюстрирующей модель транспортного средства 4WD второго варианта осуществления;
Фиг. 12 является блок–схемой конфигурации, иллюстрирующей передний F/F–компенсатор второго варианта осуществления;
Фиг. 13 является блок–схемой конфигурации, иллюстрирующей передний и задний F/F–компенсаторы второго варианта осуществления;
Фиг. 14 является блок–схемой конфигурации, иллюстрирующей задний F/F–компенсатор второго варианта осуществления;
Фиг. 15 является схемой, поясняющей уравнение движения транспортного средства с приводом на два колеса (2WD);
Фиг. 16 является блок–схемой конфигурации, которая реализует процесс вычисления управления демпфированием вибрации согласно третьему варианту осуществления;
Фиг. 17 является блок–схемой конфигурации, иллюстрирующей F/F–компенсатор третьего варианта осуществления;
Фиг. 18 является блок–схемой конфигурации, иллюстрирующей F/B–компенсатор третьего варианта осуществления;
Фиг. 19 является временной диаграммой, иллюстрирующей один пример результатов управления, когда устройство управления по третьему варианту осуществления применяется к электрическому транспортному средству, и результаты управления согласно предшествующему уровню техники;
Фиг. 20 является блок–схемой конфигурации, которая реализует процесс вычисления управления демпфированием вибрации четвертого варианта осуществления; и
фиг. 21 является блок–схемой конфигурации, иллюстрирующей F/F–компенсатор четвертого варианта осуществления.
ОСУЩЕСТВЛЕНИЕ ИЗОБРЕТЕНИЯ
[0009] Сначала будут описаны системные конфигурации (системная конфигурация 1, системная конфигурация 2) электрических транспортных средств, к которым применяются устройства управления для электрического транспортного средства согласно настоящему изобретению.
[0010] Системная конфигурация 1
Фиг. 1 является блок–схемой, иллюстрирующей основную системную конфигурацию (системную конфигурацию 1) электрического транспортного средства, к которому применяется устройство управления по настоящему изобретению. Следует отметить, что электрическое транспортное средство относится к автомобилю, включающему в себя по меньшей мере один электрический двигатель (в дальнейшем также называемый просто электродвигателем) как часть или целое источника привода транспортного средства, и который способен перемещаться с помощью движущей силы электродвигателя и может быть электромобилем или гибридным автомобилем.
[0011] Аккумуляторная батарея 1 разряжает электроэнергию привода на электродвигатель 4 и заряжается регенеративной электроэнергией от электродвигателя 4.
[0012] Контроллер 2 электродвигателя включает в себя, например, центральный процессор (ЦП), постоянное запоминающее устройство (ПЗУ), оперативное запоминающее устройство (ОЗУ) и интерфейс ввода/вывода (интерфейс ввода/вывода). Сигналы различных переменных транспортного средства, указывающих состояния транспортного средства, такие как скорость V транспортного средства, положение θ акселератора, фаза α ротора электродвигателя 4, токи (iu, iv, iw в случае трехфазного переменного тока) электродвигателя 4 и значение команды тормозной/движущей силы вводятся в контроллер 2 электродвигателя в виде цифровых сигналов. На основе входных сигналов контроллер 2 электродвигателя генерирует ШИМ–сигнал для управления электродвигателем 4. Далее, контроллер 2 электродвигателя генерирует сигнал возбуждения для инвертора 3 на основе сгенерированного ШИМ–сигнала. Следует отметить, что в качестве значения команды тормозной/движущей силы может использоваться значение команды тормозной/движущей силы, указывающее тормозную/движущую силу (тормозной/движущий крутящий момент), которая действует на транспортное средство не от электродвигателя 4 системной конфигурации 1, такая как торможение или выходная мощность двигателя, или, например, может использоваться измеренное значение, детектированное датчиком, таким как датчик тормозного давления, или тому подобное.
[0013] Инвертор 3 преобразует или инвертирует постоянный ток, подаваемый от аккумуляторной батареи 1, в переменный ток путем включения/выключения двух переключающих элементов (например, силовых полупроводниковых устройств, таких как БТИЗ или полевой МОП-транзистор), обеспеченных для каждой фазы, тем самым вызывая протекание желаемого тока через электродвигатель 4.
[0014] Электродвигатель (трехфазный электродвигатель переменного тока) 4 генерирует движущую силу посредством переменного тока, подаваемого от инвертора 3, и передает движущую силу на левое и правое ведущие колеса 9 через редуктор 5 скорости и приводные валы 8. С другой стороны, при вращении посредством вращения ведущих колес 9a, 9b во время движения транспортного средства электродвигатель 4 генерирует регенеративную движущую силу для восстановления кинетической энергии транспортного средства в виде электрической энергии. В этом случае инвертор 3 преобразует переменный ток, генерируемый во время регенеративной работы электродвигателя 4, в постоянный ток и подает постоянный ток на аккумуляторную батарею 1.
[0015] Датчик 7 тока детектирует трехфазные переменные токи iu, iv, iw, которые протекают через электродвигатель 4. Однако, поскольку сумма трехфазных переменных токов iu, iv, iw равна нулю, могут быть детектированы токи произвольных двух фаз, а затем ток оставшейся фазы может быть получен путем вычисления.
[0016] Датчик 6 вращения является, например, датчиком положения или датчиком перемещения и детектирует фазу α ротора электродвигателя 4.
[0017] Фиг. 2 представляет собой блок–схему последовательности операций, иллюстрирующую последовательность процессов, выполняемых контроллером 2 электродвигателя. Процессы от этапа S201 до этапа S205 запрограммированы на постоянное выполнение с фиксированным интервалом времени, пока работает система транспортного средства.
[0018] На этапе S201 сигналы, указывающие состояния транспортного средства, вводятся в контроллер 2 электродвигателя. Здесь вводятся скорость V (км/ч) транспортного средства, положение θ (%) акселератора, фаза α (рад) ротора электродвигателя 4, частота вращения Nm (об/мин) электродвигателя 4, трехфазные переменные токи iu, iv, iw, которые протекают через электродвигатель 4, значение Vdc (В) напряжения постоянного тока аккумуляторной батареи 1 и значение команды тормозной/движущей силы.
[0019] Скорость V транспортного средства (км/ч) получают от непоказанного датчика скорости транспортного средства или от другого непоказанного контроллера посредством связи. Альтернативно, контроллер 2 электродвигателя получает скорость v(м/с) транспортного средства путем умножения механической угловой скорости ωm ротора на динамический радиус r шины и деления произведения на передаточное число конечной передачи, а затем умножает скорость v (м/с) транспортного средства на 3600/1000 для выполнения преобразования единиц, тем самым получая скорость V транспортного средства (км/ч).
[0020] Контроллер 2 электродвигателя получает положение θ (%) акселератора от непоказанного датчика положения акселератора. Положение θ (%) акселератора может быть получено от другого контроллера, такого как непоказанный контроллер транспортного средства.
[0021] Фазу α (рад) ротора электродвигателя 4 получают от датчика 6 вращения. Скорость вращения Nm (об/мин) электродвигателя 4 получают путем деления угловой скорости ω ротора (электрического угла) на количество пар полюсов P электродвигателя, чтобы получить скорость вращения ωm (рад/с) электродвигателя являющуюся механической угловой скоростью электродвигателя 4, а затем умножения полученной скорости вращения ωm электродвигателя на 60/(2π). Угловую скорость ω ротора получают путем дифференцирования фазы α ротора.
[0022] Токи iu, iv, iw (A), которые протекают через электродвигатель 4, получают от датчика 7 тока.
[0023] Значение Vdc (В) постоянного тока детектируется датчиком напряжения (не показан), обеспеченным в линии питания постоянного тока между аккумуляторной батареей 1 и инвертором 3. Обратите внимание, что значение Vdc (В) напряжения постоянного тока может быть детектировано по сигналу, передаваемому от контроллера аккумуляторной батареи (не показан).
[0024] Значение команды тормозной/движущей силы может быть тормозным моментом, рассчитанным из значения датчика гидравлического давления, прикрепленного к непоказанной тормозной системе, или может быть получено посредством связи с другим контроллером (не показан), который вводит тормозную/движущую силу в транспортное средство, кроме электродвигателя 4 системной конфигурации 1.
[0025] На этапе S202 на основании информации транспортного средства контроллер 2 электродвигателя устанавливает значение Tm* команды крутящего момента в качестве базового целевого крутящего момента, требуемого водителем. В частности, на основании положения θ акселератора и скорости V транспортного средства, введенных на этапе S201, контроллер 2 электродвигателя устанавливает значение Tm* команды крутящего момента, ссылаясь на таблицу положения акселератора – крутящего момента, показанную на фиг. 3.
[0026] На этапе S203 контроллер 2 электродвигателя выполняет процесс вычисления управления демпфированием вибрации. В частности, на основе значения Tm* команды целевого крутящего момента, установленного на этапе S202, и скорости ωm вращения электродвигателя, контроллер 2 электродвигателя вычисляет значение Tmf* команды окончательного крутящего момента после управления демпфированием вибрации, которое подавляет вибрацию системы передачи движущей силы (крутильную вибрацию приводных валов 8 и т. д.) без потери крутящего момента приводного вала. Подробности процесса вычисления управления демпфированием вибрации будут описаны позже.
[0027] На этапе S204 контроллер 2 электродвигателя выполняет процесс вычисления значения команды тока. В частности, контроллер 2 электродвигателя получает целевое значение id* тока по оси d и целевое значение iq* тока по оси q на основе значения Tmf* команды окончательного крутящего момента, рассчитанного на этапе S203, скорости ωm вращения электродвигателя и значения Vdc напряжения постоянного тока. Например, таблица, определяющая взаимосвязь между значением команды крутящего момента, скоростью вращения электродвигателя и значением напряжения постоянного тока, а также целевым значением тока по оси d и целевым значением тока по оси q, подготовлена заранее и со ссылкой на эту таблицу получают целевое значение id* тока по оси d и целевое значение iq* тока по оси q.
[0028] На этапе S205 выполняется управление током для создания тока id по оси d и тока iq по оси q, соответственно совпадающими с целевым значением id* тока по оси d и целевым значением iq* тока по оси q, полученным на этапе S204. Соответственно, сначала ток id по оси d и ток iq по оси q получают на основании значений iu, iv, iw трехфазного переменного тока и фазы α ротора электродвигателя 4, которые были введены на этапе S201. Впоследствии значения vd, vq команды напряжения по оси d и оси q вычисляются из отклонений между значениями id*, iq* команды тока по оси d и оси q и токами id, iq по оси d и оси q. Здесь существуют случаи, когда управление развязкой применяется к вычисленным значениям vd, vq команды напряжения по оси d и по оси q.
[0029] Затем из значений vd, vq команды напряжения по оси d и оси q и фазы α ротора электродвигателя 4 получают значения vu, vv, vw команды трехфазного напряжения переменного тока. Затем ШИМ-сигналы tu (%), tv (%), tw (%) получают из полученных значений vu, vv, vw команды трехфазного напряжения переменного тока и значения Vdc напряжения постоянного тока. Открывая и закрывая переключающие элементы инвертора 3 в соответствии с полученными таким образом ШИМ–сигналами tu, tv, tw, возможно приводить в действие электродвигатель 4 с требуемым крутящим моментом, указанным значением Tm* команды целевого крутящего момента.
[0030] Системная конфигурация 2
Фиг.4 является блок–схемой, иллюстрирующей основную системную конфигурацию (системная конфигурация 2) электрического транспортного средства, к которому применяется устройство управления в соответствии с настоящим изобретением, причем электрическое транспортное средство отличается от электрического транспортного средства, включающего системную конфигурацию 1, описанную выше.
[0031] Аккумуляторная батарея 1fr электроэнергию привода на электродвигатель 4f переднего привода и электродвигатель 4r заднего привода и заряжается регенеративной электроэнергией от электродвигателя 4f переднего привода и электродвигателя 4r заднего привода.
[0032] Сигналы различных переменных транспортного средства, указывающих состояния транспортного средства, такие как скорость V транспортного средства, положение θ акселератора, фаза αf ротора двигателя 4f переднего привода, фаза αr ротора двигателя 4r заднего привода, токи (iu, iv, iw в случае трехфазного переменного тока) двигателя 4f переднего привода, и токи (iu, iv, iw в случае трехфазного переменного тока) двигателя 4r заднего привода вводятся в контроллер 2fr электродвигателя в виде цифровых сигналов. На основе входных сигналов контроллер 2fr электродвигателя генерирует ШИМ–сигналы для управления соответственно двигателем 4f переднего привода и двигателем 4r заднего привода. Далее, контроллер 2fr электродвигателя генерирует сигналы возбуждения для переднего инвертора 3f и заднего инвертора 3r на основе сгенерированных соответствующих ШИМ-сигналов.
[0033] Каждый из переднего инвертора 3f и заднего инвертора 3r (в дальнейшем также именуемые как передний/задний инверторы 3f, 3r) преобразуют или инвертируют постоянный ток, подаваемый от аккумуляторной батареи 1fr, в переменный ток путем включения/выключения двух переключающих элементов (например, силовых полупроводниковых устройствах, таких как БТИЗ или полевой МОП-транзистор), обеспеченных для каждой фазы, тем самым вызывая протекание желаемых токов через двигатель 4f переднего привода и двигатель 4r заднего привода.
[0034] Двигатель 4f переднего привода (трехфазный электродвигатель переменного тока) и двигатель 4r заднего привода (трехфазный электродвигатель переменного тока) (далее также совместно именуемые двигателями 4f, 4r переднего/заднего привода) генерируют движущие силы посредством переменных токов, поступающих от передних/задних инверторов 3f, 3r и передают движущие силы на передние ведущие колеса 9f и задние ведущие колеса 9r (далее также совместно именуемые как передние/задние ведущие колеса 9f, 9r) через передний редуктор 5fr скорости и задний редуктор 5r скорости и передние приводные валы 8f и задние приводные валы 8r. С другой стороны, при вращении посредством вращения передних/задних ведущих колес 9f, 9r во время движения транспортного средства передние/задние приводные электродвигатели 4f, 4r генерируют регенеративные движущие силы для восстановления кинетической энергии транспортного средства в виде электроэнергии. В этом случае каждый из переднего/заднего инверторов 3f, 3r преобразует переменный ток, генерируемый во время регенеративной операции, в постоянный ток, и каждый подает постоянный ток на аккумуляторную батарею 1fr.
[0035] Следует отметить, что передние ведущие колеса 9f, упомянутые в этом описании, представляют левое и правое ведущие колеса в передней части транспортного средства, а задние ведущие колеса 9r – левое и правое ведущие колеса в задней части транспортного средства.
[0036] Передний датчик 6f вращения и задний датчик 6r вращения являются, например, датчиками положения или датчиками перемещения и, соответственно, детектируют фазы αf, αr ротора электродвигателей 4f, 4r переднего/заднего привода.
[0037] фиг. 5 является блок–схемой последовательности операций, иллюстрирующей последовательность процессов, выполняемых контроллером 2fr электродвигателя. Процессы от этапа S501 до этапа S505 запрограммированы на постоянное выполнение с фиксированным интервалом времени, когда система транспортного средства работает.
[0038] На этапе S501, как и в системной конфигурации 1, описанной выше, сигналы передней и задней конфигураций, необходимые для вычисления управления демпфированием вибрации, которые будут описаны ниже, получают от вводов датчиков или от другого контроллера посредством связи.
[0039] На этапе S502 на основе информации транспортного средства контроллер 2fr электродвигателя устанавливает значение Tm* команды крутящего момента в качестве базового целевого крутящего момента, требуемого водителем. В частности, на основании положения θ акселератора и скорости V транспортного средства, введенных на этапе S501, контроллер 2fr электродвигателя устанавливает значение Tm* команды крутящего момента, ссылаясь на таблицу положения акселератора – крутящего момента, показанную на фиг. 3. Затем контроллер 2fr электродвигателя выполняет процесс продольного распределения движущей силы, чтобы вычислить значение Tm1* команды переднего целевого крутящего момента и значение Tmr1* команды заднего целевого крутящего момента.
[0040] Фиг. Фиг.6 является схемой, поясняющей процесс продольного распределения движущей силы. На фигуре Kf представляет собой значение для распределения движущей силы, которое выводится согласно значению Tm* команды крутящего момента в качестве требуемого водителем крутящего момента, на двигатель 4f переднего привода и двигатель 4r заднего привода и устанавливается на значение от 0 до 1. Контроллер 2fr электродвигателя вычисляет значение Tm1* команды переднего целевого крутящего момента для системы переднего привода путем умножения значения Tm* команды крутящего момента на Kf, установленное на значение от 0 до 1. Одновременно контроллер 2fr электродвигателя рассчитывает значение Tmr1 команды заднего целевого крутящего момента для системы заднего привода путем умножения значения Tm* команды крутящего момента на 1—Kf.
[0041] На этапе S503 контроллер 2fr электродвигателя выполняет процесс вычисления управления демпфированием вибрации. На этом этапе, используя в качестве входных данных значение Tm1* команды переднего целевого крутящего момента, рассчитанное на этапе S502, система переднего привода системной конфигурации 2 вычисляет значение Tmf* команды переднего окончательного крутящего момента, которое подавляет вибрацию системы передачи движущей силы (крутильную вибрацию передних приводных валов 8f и т.д.).
[0042] Аналогичным образом, используя в качестве входных данных значение Tmr1 команды заднего целевого крутящего момента, вычисленное на этапе S502, система заднего привода рассчитывает значение Tmrf* команды заднего окончательного крутящего момента, которое подавляет вибрацию системы передачи движущей силы (крутильную вибрацию задних приводных валов 8r и т.д.). Подробности процесса вычисления управления демпфированием вибрации, который является особенностью настоящего изобретения, будут описаны позже.
[0043] На этапе S504, как и в системной конфигурации 1, контроллер 2fr электродвигателя выполняет процесс вычисления значения команды тока. В частности, контроллер 2fr электродвигателя получает целевые значения id* тока по оси d и целевые значения iq* тока по оси q двигателей 4f, 4r переднего/заднего привода на основе значений Tmf*, Tmrf* команды переднего/заднего окончательного крутящего момента, вычисленных на этапе S503, угловых скоростей ωmf, ωmr вращения переднего и заднего электродвигателя и значения Vdc напряжения постоянного тока.
[0044] На этапе S505, как и в системной конфигурации 1, контроллер 2fr электродвигателя выполняет управление током. Более конкретно, контроллер 2fr электродвигателя открывает и закрывает переключающие элементы передних/задних инверторов 3f, 3r в соответствии с ШИМ-сигналами для систем переднего и заднего привода, полученными таким же образом, как описано в системной конфигурации 1, так что возможно приводить в действие электродвигатели 4f, 4r переднего/заднего привода с требуемыми крутящими моментами, указанными значениями Tmf*, Tmrf* команд переднего/заднего окончательного крутящего момента.
[0045] Выше приведены системные конфигурации электрических транспортных средств, к которым применяются устройства управления для электрического транспортного средства в соответствии с настоящим изобретением, и схема процессов, выполняемых контроллерами (контроллером 2 электродвигателя и контроллером 2fr электродвигателя), включенными в соответствующие системы. В дальнейшем варианты осуществления настоящего изобретения будут описаны, главным образом, в отношении подробностей процессов вычисления управления демпфированием вибрации, которые являются особенностями настоящего изобретения.
[0046] Первый вариант осуществления
Предполагается, что управляющее устройство для электрического транспортного средства этого варианта осуществления применяется к системной конфигурации 2, описанной выше. В дальнейшем будут описаны подробности процесса управления демпфированием вибрации, который выполняется на этапе S503, описанном выше, устройством управления для электрического транспортного средства первого варианта осуществления. Следует отметить, что процесс управления демпфированием вибрации выполняется с целью устранения (подавления) вибрации, вызванной, главным образом, кручением приводных валов в системе передачи движущей силы транспортного средства.
[0047] Сначала со ссылкой на фиг. 7 будет описано уравнение движения от значения команды переднего крутящего момента до угловой скорости вращения переднего электродвигателя транспортного средства, включающего в себя приводные электродвигатели, соответственно, для передних и задних ведущих колес (системная конфигурация 2, см. Фиг. 4).
[0048] Фиг. 7 является схемой, моделирующей систему передачи движущей силы транспортного средства в соответствии с системной конфигурацией 2 (в дальнейшем также называемой транспортным средством с приводом на четыре колеса (4WD)), и соответствующие параметры на той же фигуре являются следующими. Обратите внимание, что вспомогательные символы f и r соответственно представляют передний и задний.
Jmf, Jmr: инерция электродвигателя
Jwf, Jwr: инерция ведущего колеса (для одного вала)
Kdf, Kdr: жесткость при кручении приводной системы
Ktf, Ktr: коэффициент трения между шиной и дорожным покрытием
Nf, Nr: общее передаточное число
rf, rr: радиус загрузки шины
ωmf, ωmr: угловая скорость вращения электродвигателя
θmf, θmr: угол поворота электродвигателя
ωwf, ωwr: угловая скорость вращения ведущего колеса
θwf, θwr: угол поворота ведущего колеса
Tmf, Tmr: крутящий момент электродвигателя
Tdf, Tdr: крутящий момент приводного вала
Ff, Fr: движущая сила (для двух валов)
θdf, θdr: угол кручения приводного вала
V: скорость кузова транспортного средства
M: масса кузова транспортного средства
Из фиг. 7, уравнение движения транспортного средства 4WD задается следующими формулами (1)–(11).
[0049] [Формула 1]

[0050] [Формула 2]

[0051] [Формула 3]

[0052] [Формула 4]

[0053] [Формула 5]

[0054] [Формула 6]

[0055] [Формула 7]

[0056] [Формула 8]

[0057] [Формула 9]

[0058] [Формула 10]

[0059] [Формула 11]

[0060] Посредством преобразования Лапласа вышеприведенных формул (1)–(11) характеристику перехода от крутящего момента Tmf переднего электродвигателя к угловой скорости ωmf вращения переднего электродвигателя получают, как указано в следующей формуле (12).
[0061] [Формула 12]

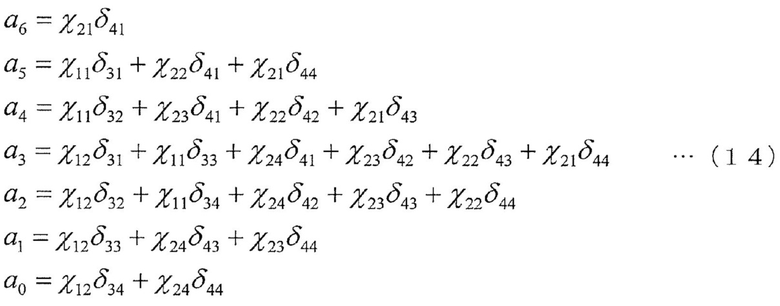
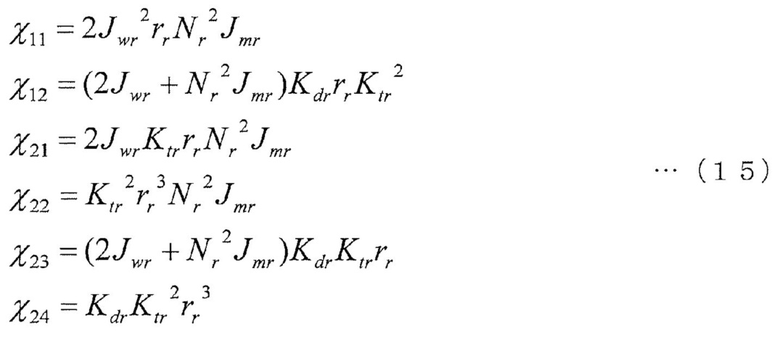
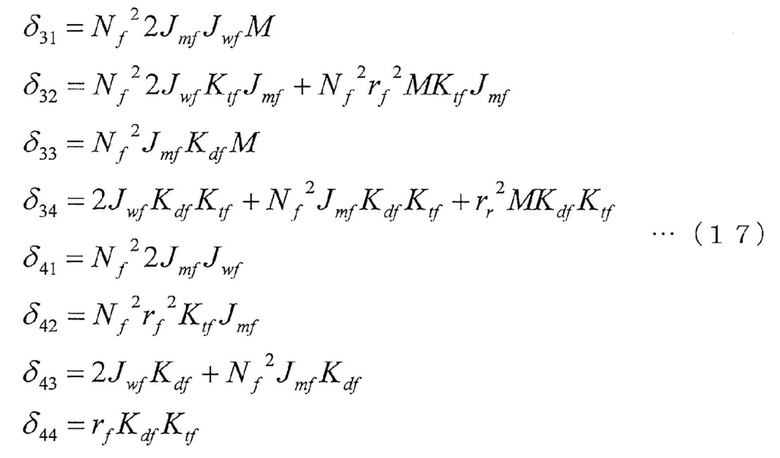
[0062] где параметры в формуле (12) соответственно задаются следующими формулами (13)–(17).
[0063] [Формула 13]
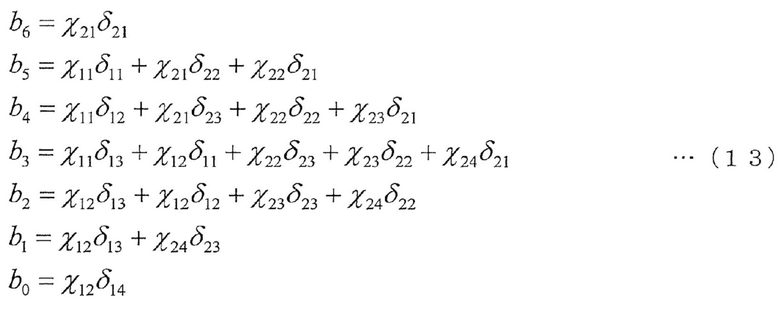
[0064] [Формула 14]
[0065] [Формула 15]
[0066] [Формула 16]

[0067] [Формула 17]
[0068] Исследуются полюса и нулевые точки функции перехода, заданной формулой (12), и получается следующая формула (18).
[0069] [Формула 18]

[0070] Поскольку α и α’, β и β’, ζpr и ζpr’, и ωpr и ωpr’ в формуле (18) принимают очень близкие значения, характеристика Gp(s) перехода (второго порядка)/третьего порядка), заданная следующей формулой (19), может быть получена путем устранения полюсов-нулей (аппроксимация α=α’, β=β’, ζpr=ζpr’, ωpr=ωpr’).
[0071] [Формула 19]

[0072] В результате, что касается уравнения движения транспортного средства 4WD, характеристика перехода от крутящего момента переднего электродвигателя к угловой скорости вращения переднего электродвигателя может быть аппроксимирована до модели Gp(s) транспортного средства, заданной формулой второго порядка/третьего порядка (далее также называемой моделью Gp(s) транспортного средства 4WD).
[0073] Здесь, в отношении модели Gp(s) транспортного средства, когда отклик модели, который гасит крутильную вибрацию из–за передних приводных валов 8f, задается следующей формулой (20), компенсатор с прямой связью (передний F/F-компенсатор 801, см. фиг. 8), который гасит крутильную вибрацию системы переднего привода, задается следующей формулой (21).
[0074] [Формула 20]

[0075] [Формула 21]

[0076] Аналогично, характеристика перехода от крутящего момента Tmr заднего электродвигателя к угловой скорости ωmr вращения заднего электродвигателя получается, как задано следующей формулой (22).
[0077] [Формула 22]

[0078] Здесь, в отношении модели Gpr(s) транспортного средства, когда отклик модели, который гасит крутильную вибрацию из–за задних приводных валов 8r, задается следующей формулой (23), F/F–компенсатор (задний F/F-компенсатор 805, см. Фиг. 8), который гасит крутильную вибрацию системы заднего привода, задается следующей формулой (24).
[0079] [Формула 23]

[0080] [Формула 24]

[0081] Впоследствии уравнение движения транспортного средства 4WD от значения Tmf команды заднего окончательного крутящего момента до угловой скорости ωmf вращения переднего электродвигателя будет описано в частности со ссылкой на фиг. 7.
[0082] Посредством преобразования Лапласа вышеприведенных формул (1)–(11) характеристика перехода от значения команды крутящего момента заднего электродвигателя в качестве тормозного/движущего крутящего момента для задних ведущих колес к угловой скорости вращения переднего электродвигателя получается, как указано в следующей формуле (25). Обратите внимание, что параметры в формуле (22) соответственно задаются приведенными выше формулами (13)–(17).
[0083] [Формула 25]

[0084] Полюсы функции перехода, заданные формулой (25), рассматриваются и задаются следующей формулой (26).
[0085] [Формула 26]

[0086] где α и β полюсов формулы (26) расположены далеко от исходного и доминирующего полюсов, влияние на модель транспортного средства, заданную Gprf(s), мало. Следовательно, формула (26) может быть аппроксимирована до функции перехода, заданной следующей формулой (27).
[0087] [Формула 27]

[0088] Далее, когда алгоритм управления гашением задней вибрации рассматривается для модели Gprf(s) транспортного средства, функция перехода получается, как задано следующей формулой (28).
[0089] [Формула 28]

[0090] Затем, чтобы погасить крутильную вибрацию системы переднего привода из отклика модели оцененного значения угловой скорости вращения электродвигателя системы переднего привода, функция перехода следующей формулы (29) извлекается из функции перехода формулы (28).
[0091] [Формула 29]

[0092] Аналогично, характеристика перехода от значения Tmf команды переднего окончательного крутящего момента к угловой скорости ωmr вращения заднего электродвигателя задается формулой (30).
[0093] [Формула 30]

[0094] где α и β полюсов формулы (30) расположены далеко от исходного и доминирующего полюсов, влияние на модель транспортного средства, заданную Gpfr(s), мало. Следовательно, формула (30) может быть аппроксимирована до функции перехода, заданной следующей формулой (31).
[0095] [Формула 31]

[0096] Далее, когда алгоритм управления гашением передней вибрации рассматривается для модели Gpfr(s) транспортного средства, функция перехода получается, как указано в следующей формуле (32).
[0097] [Формула 32]

[0098] Затем, чтобы погасить крутильную вибрацию системы заднего привода из отклика модели оцененного значения угловой скорости вращения электродвигателя системы заднего привода, функция перехода следующей формулы (33) выводится из функции перехода формулы (32).
[0099] [Формула 33]

[0100] Процесс вычисления управления демпфированием вибрации, который выполняется с использованием моделей транспортного средства (функций перехода), описанных выше, будет описан со ссылкой на фиг. 8.
[0101] Фиг. 8 является одним примером блок–схемы конфигурации, которая реализует процесс вычисления управления демпфированием вибрации по первому варианту осуществления. В блоках управления, показанных на фиг. 8, значение Tmf* команды переднего окончательного крутящего момента вычисляется из значения Tm1* команды переднего целевого крутящего момента, угловой скорости ωmf вращения переднего электродвигателя и значения Tmr1* команды заднего целевого крутящего момента. Кроме того, значение Tmrf* команды заднего окончательного крутящего момента вычисляется из значения Tmr1* команды заднего целевого крутящего момента, угловой скорости ωmr вращения заднего двигателя и значения Tm1* команды переднего целевого крутящего момента. Далее будут описаны подробности соответствующих блоков управления, показанных на фиг. 8.
[0102] Передний F/F–компенсатор 801 состоит из фильтра Gr(s)/Gp(s), заданного приведенной выше формулой (21). Передний F/F–компенсатор 801 вычисляет первое значение команды крутящего момента, используя значение Tm1* команды переднего целевого крутящего момента в качестве ввода и выполняя процесс F/F–компенсации по вышеуказанной формуле (21).
[0103] Сумматор 809 добавляет первое значение команды крутящего момента и позднее описанное второе значение команды крутящего момента для вычисления значения Tmf* команды переднего окончательного крутящего момента.
[0104] Блок 802 управления состоит из модели Gp(s) транспортного средства, заданной вышеуказанной формулой (12). Блок 802 управления вычисляет оцененное значение угловой скорости вращения переднего электродвигателя, используя значение Tmf* команды переднего окончательного крутящего момента в качестве входных данных и используя модель Gp(s) транспортного средства.
[0105] Блок 803 управления состоит из модели Gprf(s) транспортного средства, заданной вышеуказанной формулой (25). Блок 803 управления вычисляет коррекционное оцененное значение угловой скорости вращения переднего электродвигателя в качестве величины коррекции угловой скорости вращения электродвигателя, используя в качестве входных данных значение Tmr1* команды заднего целевого крутящего момента в качестве тормозного/движущего крутящего момента для задних ведущих колес и используя модель Gprf(s) транспортного средства. Следует отметить, что в качестве модели Gprf(s) транспортного средства любая из формул (26)–(28), каждая из которых является аппроксимированной формулой вышеприведенной формулы (25), может использоваться для уменьшения программной вычислительной нагрузки контроллера 2fr электродвигателя.
[0106] Сумматор 810 добавляет оцененное значение угловой скорости вращения переднего электродвигателя в качестве выходного сигнала блока 803 управления к оцененному значению угловой скорости вращения переднего электродвигателя в качестве выходного сигнала блока управления 802 для вычисления скорректированного оцененного значения угловой скорости вращения переднего электродвигателя, которое корректируется с учетом тормозной/движущей силы для задних ведущих колес. Следовательно, возможно сделать так, что оцененное значение и детектированное значение угловой скорости вращения переднего электродвигателя совпадают друг с другом.
[0107] Вычитатель 811 вычитает угловую скорость ωmf вращения электродвигателя (детектированное значение) из скорректированного оцененного значения угловой скорости вращения переднего электродвигателя, чтобы вычислить отклонение между оцененным значением и детектированным значением угловой скорости вращения электродвигателя, и выдает вычисленное значение в блок управления 804.
[0108] Блок 804 управления состоит из полосового фильтра Hf(s) и обратной характеристики модели Gp(s) транспортного средства, заданной приведенной выше формулой (19). Блок 804 управления вычисляет второе значение команды крутящего момента, используя в качестве входных данных отклонение между оцененным значением и детектированным значением угловой скорости вращения электродвигателя и умножая отклонение на Hf(s)/Gp(s). Подробности полосового фильтра Hf(s) будут описаны позже.
[0109] Затем сумматор 809 суммирует первое значение команды крутящего момента и второе значение команды крутящего момента, так что вычисляется значение Tmf* команды переднего окончательного крутящего момента.
[0110] Далее будет описано вычисление значения Tmrf команды заднего окончательного крутящего момента. Задний F/F–компенсатор 805 состоит из фильтра, заданного приведенной выше формулой (24). Задний F/F–компенсатор 805 вычисляет третье значение команды крутящего момента, используя значение Tmr1* команды заднего целевого крутящего момента в качестве ввода и выполняя процесс F/F–компенсации по вышеуказанной формуле (24).
[0111] Сумматор 812 добавляет третье значение команды крутящего момента и описанное ниже четвертое значение команды крутящего момента для вычисления значения Tmrf* команды заднего окончательного крутящего момента.
[0112] Блок 806 управления состоит из модели Gpr(s) транспортного средства, заданной вышеуказанной формулой (22). Блок 806 управления вычисляет оцененное значение угловой скорости вращения заднего электродвигателя, используя значение Tmrf* команды заднего окончательного крутящего момента в качестве входных данных и используя модель Gpr(s) транспортного средства.
[0113] Блок 807 управления состоит из модели Gpfr(s) транспортного средства, заданной вышеуказанной формулой (30). Блок 807 управления вычисляет коррекционное оцененное значение угловой скорости вращения заднего электродвигателя, используя значение Tm1* команды переднего целевого крутящего момента в качестве ввода и используя модель Gpfr(s) транспортного средства. Следует отметить, что в качестве модели Gpfr(s) транспортного средства любая из формул (31)–(33), каждая из которых является аппроксимированной формулой вышеприведенной формулы (30), может использоваться для уменьшения программной вычислительной нагрузки контроллера 2fr электродвигателя.
[0114] Сумматор 813 добавляет коррекционное оцененное значение угловой скорости вращения заднего электродвигателя в качестве выходного сигнала блока 807 управления к оцененному значению угловой скорости вращения заднего электродвигателя в качестве выходного сигнала блока 806 управления для вычисления скорректированного оцененного значения угловой скорости вращения заднего электродвигателя, которое корректируется с учетом тормозной/движущей силы для передних ведущих колес. Следовательно, можно сделать так, что оцененное значение и детектированное значение угловой скорости вращения заднего электродвигателя совпадают друг с другом.
[0115] Вычитатель 814 вычитает угловую скорость ωmr вращения заднего электродвигателя (детектированное значение) из скорректированного оцененного значения угловой скорости вращения заднего электродвигателя, чтобы вычислить отклонение между оцененным значением и детектированным значением угловой скорости вращения заднего электродвигателя, и выводит вычисленное значение в блок управления 808.
[0116] Блок 808 управления состоит из полосового фильтра Hr(s) и обратной характеристики модели Gpr(s) транспортного средства, заданной приведенной выше формулой (22). Блок 808 управления вычисляет четвертое значение команды крутящего момента, используя в качестве входных данных отклонение между оцененным значением и детектированным значением угловой скорости вращения электродвигателя и умножая отклонение на Hr(s)/Gpr(s). Подробности полосового фильтра Hr(s) будут описаны позже.
[0117] Затем сумматор 812 суммирует первое значение команды крутящего момента и второе значение команды крутящего момента, так что вычисляется значение Tmrf* команды заднего окончательного крутящего момента.
[0118] Здесь будут описаны передний и задний полосовые фильтры Hf(s), Hr(s). Характеристики демпфирования каждого из полосовых фильтров Hf(s), Hr(s) приблизительно одинаковы на стороне низких частот и стороне высоких частот, и частота fp крутильного резонанса каждой из систем привода установлена около середины полосы пропускания на логарифмической оси (логарифмической шкале).
[0119] Например, когда каждый из полосовых фильтров Hf(s), Hr(s) состоит из фильтра верхних частот первого порядка и фильтра нижних частот первого порядка, полосовой фильтр Hf(s) получают, как указано в следующей формуле (34), и полосовой фильтр Hr получают, как указано в следующей формуле (35).
[0120] [Формула 34]

[0121] где τLf=1/(2πfHCf), fHCf=kf·fpf, τHf=1/(2πfLCf), and fLCf=fpf/kf. Частота fpf является частотой крутильного резонанса системы для системы переднего привода, а kf является произвольным значением, образующим полосу пропускания.
[0122] [Формула 35]

[0123] где τLr=1/(2πfHCr), fHCr=kr·fpr, τHr= =1/(2πfLCr), and fLCr=fpr/kr. Частота fpr является частотой крутильного резонанса системы привода для системы заднего привода, а kr является произвольным значением, образующим полосу пропускания.
[0124] Здесь результаты вычисления управления демпфированием вибрации устройством управления для электрического транспортного средства первого варианта осуществления будут описаны со ссылкой на фиг. 9.
[0125] Фиг. 9 является временной диаграммой для сравнения результатов управления устройствами управления для электрического транспортного средства первого варианта осуществления и описанных позже второго и четвертого вариантов осуществления и результатов управления согласно предшествующему уровню техники. На фигуре значение Tmf* команды переднего окончательного крутящего момента, значение Tmrf* команды заднего окончательного крутящего момента, второе значение команды крутящего момента в качестве переднего крутящего момента демпфирования F/B вибрации, четвертое значение команды крутящего момента в качестве заднего крутящего момента демпфирования F/B вибрации, продольное ускорение транспортного средства и увеличенный вид продольного ускорения соответственно показаны в этом порядке сверху. На фигуре сплошные линии указывают результаты управления согласно первому, второму и четвертому вариантами осуществления, а пунктирные линии указывают результаты управления согласно предшествующему уровню техники.
[0126] Фиг. 9 иллюстрирует состояние управления транспортным средством, являющимся электрическим транспортным средством 4WD, включающим в себя электродвигатели в качестве источников энергии не только для передних ведущих колес, но также и для задних ведущих колес, когда водитель быстро нажимает акселератор из остановленного состояния транспортного средства, так что значение команды управления передним целевым крутящим моментом и значение команды управления задним целевым крутящим моментом увеличиваются на шаг для ускорения транспортного средства.
[0127] Сначала, в момент времени t1 значение команды переднего целевого крутящего момента и значение команды заднего целевого крутящего момента изменяются на шаг путем нажатия педали акселератора водителем.
[0128] Затем в предшествующем уровне техники (пунктирные линии), поскольку рассматривается только одна из передней и задней тормозных/движущих сил, фактические детектированные значения становятся больше, чем оценочные значения скорости вращения переднего и заднего электродвигателей, рассчитанные системой управления с обратной связью, соответствующей добавлению движущей силы другими ведущими колесами. Затем, чтобы компенсировать крутящий момент, соответствующий детектированной скорости вращения электродвигателя, превышающей оцененную, значение команды крутящего момента корректируется в отрицательную сторону крутящего момента (в направлении уменьшения крутящего момента электродвигателя), чтобы препятствовать ускорению с момента времени t1 до t3 (см. второе и четвертое значения команды крутящего момента). Следовательно, значение Tmf* команды переднего окончательного крутящего момента и значение Tmrf* команды заднего окончательного крутящего момента не могут быть выведены в качестве значений команды крутящего момента, требуемых водителем. В результате видно, что продольное ускорение (ускорение) транспортного средства ограничено около момента времени t2 по сравнению с ускорением в момент времени t3 (см., в частности, ПРОДОЛЬНОЕ УСКОРЕНИЕ (УВЕЛИЧЕННЫЙ ВИД)).
[0129] Таким образом, в предшествующем уровне техники, поскольку излишняя компенсация для подавления вибрации выводится из F/B–компенсатора управления демпфированием вибрации, чтобы препятствовать ускорению транспортного средства, невозможно получить ускорение или замедление, предполагаемые водителем на основе операции ускорения или операции торможения водителем, и, следовательно, водитель получает ощущение несоответствия.
[0130] В отличие от этого, согласно устройству управления для электрического транспортного средства первого варианта осуществления (сплошные линии), даже когда значения команд переднего и заднего целевого крутящего момента изменяются на шаг в момент времени t1, второе значение команды крутящего момента и четвертое значение команды крутящего момента равны нулю с момента времени t1 до t3. Можно сказать, что это состояние, в котором оцененное значение и детектированное значение угловой скорости вращения электродвигателя совпадают друг с другом. Следовательно, согласно устройству управления для электрического транспортного средства первого варианта осуществления, возможно подавить то, что излишняя компенсация для подавления вибрации (отрицательный крутящий момент) выводится из F/B-компенсатора, чтобы компенсировать составляющую крутящего момента, соответствующую разнице между оцененным значением и детектированным значением угловой скорости вращения переднего электродвигателя в системе управления с обратной связью, как в предшествующем уровне техники (пунктирные линии). Следовательно, с момента времени t1 до t3 как значение Tmf* команды переднего окончательного крутящего момента, так и значение Tmrf* команды заднего окончательного крутящего момента могут быть выведены в качестве значений команды крутящего момента, подразумеваемых водителем.
[0131] В результате, даже во время ускорения с использованием передних и задних ведущих колес возможно получить ускорение, подразумеваемое водителем. Это эффект, достигаемый путем корректировки оцененного значения угловой скорости вращения электродвигателя с использованием фильтра, сконфигурированного на основе функции перехода угловой скорости вращения заднего электродвигателя для передних ведущих колес (или угловой скорости вращения переднего электродвигателя для задних ведущих колес).
[0132] Хотя были описаны результаты управления со стороны привода электрического транспортного средства 4WD, результаты управления во время регенеративной операции одинаковы. То есть в предшествующем уровне техники, когда электрическое транспортное средство 4WD замедляется, второе значение команды крутящего момента и четвертое значение команды крутящего момента корректируются в положительную сторону крутящего момента посредством излишней компенсации для подавления вибрации, так что замедление сдерживается, и, следовательно, невозможно получить замедление, предполагаемое водителем. В отличие от этого, согласно устройству управления для электрического транспортного средства первого варианта осуществления, подобному управлению со стороны привода, описанному выше, поскольку возможно подавить вывод излишней компенсации для подавления вибрации (положительного крутящего момента) из F/B-компенсатора управления демпфированием вибрации, возможно реализовать предполагаемое водителем замедление.
[0133] Как описано выше, устройство управления для электрического транспортного средства по первому варианту осуществления представляет собой устройство, которое реализует способ управления для электрического транспортного средства, который устанавливает значение команды крутящего момента электродвигателя на основе информации транспортного средства и управляет крутящим моментом первого электродвигателя (электродвигателя 4f), соединенного с первым ведущим колесом, которое является одним из переднего ведущего колеса и заднего ведущего колеса (в этом варианте осуществления переднее ведущее колесо). Устройство управления для электрического транспортного средства вычисляет первое значение команды крутящего момента посредством вычисления с прямой связью на основе значения команды крутящего момента электродвигателя, детектирует угловую скорость вращения первого электродвигателя и оценивает угловую скорость вращения первого электродвигателя на основе значения команды первого крутящего момента с использованием модели Gp(s) транспортного средства, которая имитирует характеристику перехода от крутящего момента, вводимого на первое ведущее колесо, к угловой скорости вращения первого электродвигателя. Затем устройство управления вычисляет второе значение команды крутящего момента из отклонения между детектированным значением и оцененным значением угловой скорости вращения первого электродвигателя с использованием фильтра Hf(s)/Gp(s), состоящего из обратной характеристики модели Gp(s) транспортного средства и полосового фильтра Hf(s) с центральной частотой, близкой к частоте крутильной вибрации транспортного средства, управляет крутящим моментом первого электродвигателя согласно значению команды переднего окончательного крутящего момента, полученному путем сложения первого значения команды крутящего момента и второго значения команды крутящего момента вместе и корректирует, когда вводят тормозной/движущий крутящий момент для второго ведущего колеса, являющегося ведущим колесом, отличным от первого ведущего колеса, оцененное значение угловой скорости вращения первого электродвигателя на основе тормозного/движущего крутящего момента. Эта коррекция вычисляет величину коррекции угловой скорости вращения электродвигателя, используя функцию перехода угловой скорости вращения первого электродвигателя для второго ведущего колеса, причем функция перехода смоделирована заранее, и корректирует оцененное значение угловой скорости вращения первого электродвигателя на основе величины коррекции угловой скорости вращения электродвигателя.
[0134] Следовательно, даже когда тормозной/движущий крутящий момент вводится с заднего ведущего колеса, оцененное значение и детектированное значение угловой скорости вращения переднего электродвигателя могут быть сделаны совпадающими друг с другом, и, следовательно, может быть подавлено то, что излишняя компенсация для подавления вибрации выводится из F/B–компенсатора, чтобы компенсировать составляющую крутящего момента, соответствующую расхождению между оцененным значением и детектированным значением угловой скорости вращения переднего электродвигателя в системе управления с обратной связью.
[0135] Второй вариант осуществления
Предполагается, что управляющее устройство для электрического транспортного средства этого варианта осуществления применяется к системной конфигурации 2, описанной выше. В дальнейшем процесс вычисления управления демпфированием вибрации, который выполняется на этапе S503, описанном выше, устройством управления для электрического транспортного средства второго варианта осуществления, будет описан со ссылкой на фиг. 10.
[0136] Фиг. 10 является одним примером блок–схемы конфигурации, которая реализует процесс вычисления управления демпфированием вибрации по второму варианту осуществления. Блоки управления, показанные на фиг. 10, включают в себя передний F/F–компенсатор 901, задний F/F–компенсатор 902, модель 903 транспортного средства 4WD, блок 904 управления, блок 905 управления, сумматоры 908, 909 и вычитатели 906, 907.
[0137] Передний F/F–компенсатор 901 представляет собой фильтр, который сдерживает крутильную вибрацию переднего приводного вала и состоит из фильтра Gr(s)/Gp(s), заданного приведенной выше формулой (21). Передний F/F–компенсатор 901 вычисляет первое значение команды крутящего момента, используя значение Tm1* команды переднего целевого крутящего момента в качестве ввода и выполняя процесс F/F–компенсации по вышеуказанной формуле (21).
[0138] Задний F/F–компенсатор 902 представляет собой фильтр, который ограничивает крутильную вибрацию заднего приводного вала и состоит из фильтра Grr(s)/Gpr(s), заданного приведенной выше формулой (24). Задний F/F–компенсатор 902 вычисляет третье значение команды крутящего момента, используя значение Tmr1* команды заднего целевого крутящего момента в качестве ввода и выполняя процесс F/F–компенсации по вышеуказанной формуле (24).
[0139] Модель 903 транспортного средства 4WD вычисляет оцененное значение ω˄mf угловой скорости вращения переднего электродвигателя и оцененное значение ω˄mr угловой скорости вращения заднего двигателя, используя в качестве входных данных первое значение команды крутящего момента и третье значение команды крутящего момента и используя модель транспортного средства, показанную на фиг. 11. Как показано на фиг. 11, используемая здесь модель транспортного средства представляет собой модель транспортного средства, которая имитирует систему передачи движущей силы транспортного средства с приводом на четыре колеса (транспортного средства 4WD), имеющего передние ведущие колеса и задние ведущие колеса, то есть характеристику перехода от вводов крутящих моментов на передние ведущие колеса и задние ведущие колеса к угловым скоростям вращения электродвигателя для электродвигателя переднего привода и электродвигателя заднего привода. Модель 903 транспортного средства 4WD, показанная на фиг. 11 является блок-схемой конфигурации, которая сконфигурирована эквивалентно уравнению движения (1)–(11) транспортного средства 4WD.
[0140] Здесь в показанной модели 903 транспортного средства 4WD движущая сила Fr для задних ведущих колес, вычисленная на основе третьего значения команды крутящего момента, добавляется к системе, которая вычисляет оцененное значение ω˄mf угловой скорости вращения переднего электродвигателя на основе первого значения команды крутящего момента. Следовательно, в модели транспортного средства 4WD оцененное значение угловой скорости вращения переднего электродвигателя, вычисленное на основе первого значения команды крутящего момента, может быть скорректировано на основе третьего значения команды крутящего момента, указывающего тормозной/движущий крутящий момент для задних ведущих колес.
[0141] Вычитатель 906, показанный на фиг. 10 вычитает угловую скорость ωmf вращения электродвигателя (детектированное значение) из оцененного значения ω˄mf угловой скорости вращения переднего электродвигателя, чтобы вычислить отклонение между оцененным значением и детектированным значением угловой скорости вращения электродвигателя, и выводит вычисленное значение в блок 904 управления.
[0142] Блок 904 управления состоит из полосового фильтра Hf(s), заданного вышеуказанной формулой (34), и обратной характеристики модели Gp(s) транспортного средства, заданной вышеуказанной формулой (19). Блок 804 управления вычисляет второе значение команды крутящего момента, используя в качестве входных данных отклонение между оцененным значением и детектированным значением угловой скорости вращения электродвигателя и умножая отклонение на Hf(s)/Gp(s).
[0143] Сумматор 908 складывает первое значение команды крутящего момента и второе значение команды крутящего момента для вычисления значения Tmf* команды переднего окончательного крутящего момента.
[0144] С другой стороны, вычитатель 907 вычитает угловую скорость ωmr вращения электродвигателя (детектированное значение) из оцененного значения ω˄mr угловой скорости вращения заднего электродвигателя, чтобы вычислить отклонение между оцененным значением и детектированным значением угловой скорости вращения электродвигателя, и выводит вычисленное значение в блок 905 управления.
[0145] Блок 905 управления состоит из полосового фильтра Hr(s), заданного приведенной выше формулой (35), и обратной характеристики модели Gp(s) транспортного средства, заданной приведенной выше формулой (19). Блок 804 управления вычисляет четвертое значение команды крутящего момента, используя в качестве входных данных отклонение между оцененным значением и детектированным значением угловой скорости вращения электродвигателя и умножая отклонение на Hr(s)/Gpr(s).
[0146] Сумматор 909 складывает первое значение команды крутящего момента и второе значение команды крутящего момента, чтобы вычислить значение Tmrf* команды заднего окончательного крутящего момента.
[0147] Здесь, когда частота fpf крутильного резонанса приводного вала системы переднего привода и частота fpr крутильного резонанса приводного вала системы заднего привода отличаются друг от друга (fpf≠fpr), отклик модели для процесса F/F-компенсации, выполняемого передним F/F–компенсатором 901, и отклик модели для процесса F/F-компенсации, выполняемого задним F/F–компенсатором 902, могут быть согласованы друг с другом, чтобы согласовать отклики движущей силы передних ведущих колес и задних ведущих колес друг с другом. То есть, как показано на фиг. 12, принимая во внимание блок 1101 управления в конфигурации переднего F/F–компенсатора 901, отклик модели для процесса F/F-компенсации, выполняемого передним F/F–компенсатором 901, и отклик модели для процесса F/F-компенсации, выполняемого задним F/F–компенсатором 902, могут быть согласованы между собой.
[0148] Следовательно, подъем и спад переднего и заднего крутящих моментов, когда водитель выполняет операцию включения/выключения акселератора, могут быть соответственно согласованы так, что возможно подавить возникновение ощущения двухступенчатого ускорения из–за разницы в скорости отклика движущих сил передних и задних ведущих колес. Кроме того, при проектировании системы управления с внешним контуром для управления демпфированием вибрации проектирование системы управления может быть облегчено путем согласования откликов модели для множества ведущих колес друг с другом.
[0149] Блок 1101 управления состоит из фильтра Gr(s)/Gp(s), заданного следующей формулой (36).
[0150] [Формула 36]

[0151] Альтернативно, когда fpf≠fpr, передний FF–компенсатор 901 и задний FF–компенсатор 902 могут быть сконфигурированы, как показано на фиг. 13, чтобы согласовать отклики движущей силы передних ведущих колес и задних ведущих колес друг с другом. То есть, каждый из передного F/F–компенсатора 901 и заднего F/F–компенсатора 902 может состоять как из фильтра Gr(s)/Gp(s), который сдерживает крутильную вибрацию переднего приводного вала, так и из фильтра Grr(s)/Gpr(s), который сдерживает крутильную вибрацию заднего приводного вала. Также при этой конфигурации, отклик модели для процесса F/F-компенсации, выполняемого передним F/F–компенсатором 901, и отклик модели для процесса F/F-компенсации, выполняемого задним F/F–компенсатором 902, могут быть согласованы друг с другом.
[0152] Согласно такой конфигурации, поскольку все частоты крутильной вибрации множества ведущих колес демпфируются, возможно подавлять всю крутильную вибрацию приводных валов только с помощью переднего и заднего F/F–компенсаторов 901, 902.
[0153] Когда частота fpf крутильного резонанса приводного вала системы переднего привода меньше частоты fpr крутильного резонанса приводного вала системы заднего привода (fpf˂fpr), процесс F/F-компенсации заднего F/F-компенсатора 902 на высокочастотной стороне может быть учтен на стороне процесса F/F–компенсации переднего F/F–компенсатора 901, чтобы согласовать отклики модели передних и задних ведущих колес с характеристиками на низкочастотной стороне. То есть, как показано на фиг. 14, принимая во внимание блок 1201 управления в конфигурации заднего F/F–компенсатора 902, отклики движущей силы передних и задних ведущих колес могут быть согласованы с характеристиками на низкочастотной стороне. Блок 1201 управления состоит из фильтра Gr(s)/Grr(s), имеющего обратную характеристику модели Grr(s) транспортного средства, заданную вышеупомянутой формулой (23), и модель Gr(s) транспортного средства, заданную вышеуказанной формулой (20).
[0154] Здесь, когда отклики модели множества ведущих колес согласованы с высокочастотной стороной, компенсация опережения требуется для ведущих колес, имеющих характеристику частоты крутильной вибрации приводного вала на низкочастотной стороне, и, поэтому значение команды крутящего момента, указывающее крутящий момент, равный или превышающий крутящий момент, требуемый водителем, устанавливается для этих ведущих колес. Однако, поскольку существуют верхние и нижние пределы крутящего момента или тому подобного при ускорении полного открытия или тому подобном, существуют случаи, в котрых, когда выполняется компенсация опережения, крутящий момент в соответствии с откликом модели не может быть выведен. Поэтому в этом варианте осуществления отклики модели множества ведущих колес согласованы с низкочастотной стороной.
[0155] Посредством значения Tmrf* команды заднего окончательного крутящего момента и значения Tmf* команды переднего окончательного крутящего момента, вычисленных как описано выше, также возможно подавить вывод излишней компенсации для подавления вибрации из F/B–компенсатора управления демпфированием вибрации, как указано результатами управления, показанными на фиг. 9, описанной выше (см. второй вариант осуществления на фигуре), и поэтому возможно получить ускорение, намеченное водителем, даже во время ускорения с использованием передних и задних ведущих колес.
[0156] Как описано выше, когда электрическое транспортное средство включает в себя второй электродвигатель (задний приводной двигатель) в качестве источника энергии для второго ведущего колеса (заднего ведущего колеса), модель Gp(s) транспортного средства является моделью транспортного средства 4WD, которая имитирует характеристику перехода от входных значений крутящего момента на первое ведущее колесо и второе ведущее колесо к угловым скоростям вращения электродвигателя для первого электродвигателя и второго электродвигателя, и устройство управления для электрического транспортного средства второго варианта осуществления вычисляет третье значение команды крутящего момента посредством вычисления с прямой связью на основании значения команды крутящего момента электродвигателя, детектирует угловую скорость вращения второго электродвигателя, вычисляет четвертое значение команды крутящего момента из отклонения между детектированным значением и оцененным значением угловой скорости вращения второго электродвигателя с использованием фильтра Hr(s)/Gpr(s), состоящего из обратной характеристики модели Gpr(s) транспортного средства, которая имитирует характеристику перехода от крутящего момента, введенного на второе ведущее колесо, к угловой скорости вращения электродвигателя для второго электродвигателя, и полосового фильтра Hr(s) с центральной частотой, близкой к частоте крутильной вибрации транспортного средства, и управляет крутящим моментом второго электродвигателя в соответствии со вторым значением команды окончательного крутящего момента, полученным путем сложения третьего значения команды крутящего момента и четвертого значения команды крутящего момента вместе. Затем устройство управления вычисляет оцененное значение угловой скорости вращения первого электродвигателя и оцененное значение угловой скорости вращения второго электродвигателя, используя первое значение команды крутящего момента и третье значение команды крутящего момента в качестве входных данных и используя модель транспортного средства 4WD, и корректирует оцененное значение угловой скорости вращения первого электродвигателя на основе третьего значения команды крутящего момента.
[0157] Следовательно, даже когда тормозной/движущий крутящий момент вводится с заднего ведущего колеса, оцененное значение и детектированное значение угловой скорости вращения переднего электродвигателя могут совпадать друг с другом с использованием модели транспортного средства 4 WD, предназначенной для множества ведущих колес. Следовательно, можно подавить то, что излишняя компенсация для подавления вибрации выводится из F/B–компенсатора, чтобы компенсировать составляющую крутящего момента, соответствующую расхождению между оцененным значением и детектированным значением угловой скорости вращения переднего электродвигателя в системе управления с обратной связью.
[0158] Кроме того, согласно устройству управления для электрического транспортного средства второго варианта осуществления, когда частота крутильной вибрации приводного вала первого ведущего колеса (переднего ведущего колеса) и частота крутильной вибрации приводного вала второго ведущего колеса (заднего ведущего колеса) отличаются друг от друга, отклик модели, используемый в вычислении с прямой связью, в котором вычисляется первое значение команды крутящего момента, и отклик модели, используемый в вычислении с прямой связью, в котором вычисляется третье значение команды крутящего момента, согласуются друг с другом. Следовательно, подъем и спад переднего и заднего крутящих моментов, когда водитель выполняет операцию включения/выключения акселератора, могут быть соответственно согласованы так, чтобы можно было подавить возникновение ощущения двухступенчатого ускорения из–за разницы в скоростях отклика движущих сил передних и задних ведущих колес.
[0159] Кроме того, согласно устройству управления для электрического транспортного средства второго варианта осуществления, первое значение команды крутящего момента может быть вычислено посредством вычисления с прямой связью с использованием фильтра, имеющего характеристику перехода, которая демпфирует частоту крутильной вибрации приводного вала первого ведущего колеса (переднего ведущего колеса), и третье значение команды крутящего момента может быть вычислено посредством вычисления с прямой связью с использованием фильтра, имеющего характеристику перехода, которая демпфирует частоту крутильной вибрации приводного вала второго ведущего колеса (заднего ведущего колеса). Следовательно, поскольку демпфируются все частоты крутильной вибрации множества ведущих колес, возможно подавить всю крутильную вибрацию приводных валов только с помощью переднего и заднего F/F–компенсаторов.
[0160] Кроме того, согласно способу управления для электрического транспортного средства по второму варианту осуществления, когда частота крутильной вибрации приводного вала второго ведущего колеса (заднего ведущего колеса) меньше частоты крутильной вибрации приводного вала первого ведущего колеса (переднего ведущего колеса), отклик модели, используемый в вычислении с прямой связью, в котором вычисляется первое значение команды крутящего момента, согласуется с откликом модели, используемым при вычислении с прямой связью, в котором вычисляется третье значение команды крутящего момента. Когда частота крутильной вибрации приводного вала первого ведущего колеса меньше частоты крутильной вибрации приводного вала второго ведущего колеса, отклик модели, используемый в вычислении с прямой связью, в котором вычисляется третье значение команды крутящего момента, согласуется с откликом модели, используемым в вычисление с прямой связью, в котором вычисляется первое значение команды крутящего момента. Следовательно, подъем и спад переднего и заднего крутящих моментов, когда водитель выполняет операцию включения/выключения акселератора, могут быть соответственно согласованы без необходимости компенсации опережения, так что возможно подавить возникновение ощущения двухступенчатого ускорения из–за разницы в скорости отклика движущих сил передних и задних ведущих колес.
[0161] Третий вариант осуществления
Предполагается, что устройство управления для электрического транспортного средства этого варианта осуществления применяется к системной конфигурации 1, описанной выше. Далее процесс вычисления управления демпфированием вибрации, который выполняется на этапе S203, описанном выше, устройством управления для электрического транспортного средства третьего варианта осуществления, будет описан со ссылкой на чертежи и так далее.
[0162] Сначала будет описана модель транспортного средства, используемая в процессе вычисления управления демпфированием вибрации в этом варианте осуществления.
[0163] Фиг. 15 является схемой, моделирующей систему передачи движущей силы транспортного средства системной конфигурации 1, и соответствующие параметры на той же фигуре являются следующими.
Jm: инерция электродвигателя
Jw: инерция ведущего колеса (для одного вала)
M: масса кузова транспортного средства
Kd: жесткость при кручении приводной системы
Kt: коэффициент трения между шиной и дорожным покрытием
N: общее передаточное число
r: радиус загрузки шины
ωm: угловая скорость вращения электродвигателя
θm: угол поворота электродвигателя
ωw: угловая скорость вращения ведущего колеса
θw: угол поворота ведущего колеса
Tm: крутящий момент электродвигателя
Td: крутящий момент приводного вала
F: движущая сила (для двух валов)
V: скорость кузова транспортного средства
θd: угол кручения приводного вала
На фиг. 14, уравнение движения транспортного средства с приводом на два колеса (транспортного средства 2WD) задается следующими формулами (37)–(42).
[0164] [Формула 37]

[0165] [Формула 38]

[0166] [Формула 39]

[0167] [Формула 40]

[0168] [Формула 41]

[0169] [Формула 42]

[0170] Посредством преобразования Лапласа вышеприведенных формул (37)–(42), характеристика перехода от крутящего момента Tm электродвигателя к скорости ωm вращения электродвигателя получается как задано следующими формулами (43) и (44).
[0171] [Формула 43]

[0172] [Формула 44]

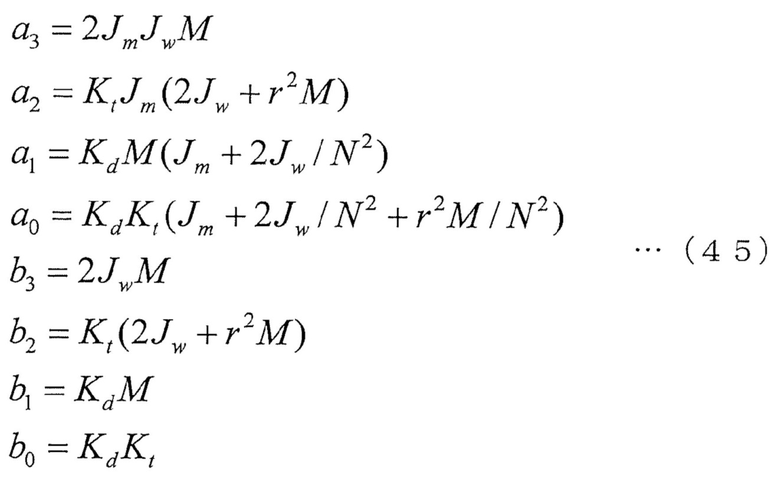
[0173] где a3, a2, a1, a0, b3, b2, b1 и b0 в формуле (44) соответственно заданы следующей формулой (45).
[0174] [Формула 45]
[0175] Кроме того, характеристика перехода от крутящего момента Tm электродвигателя к крутящему моменту Td приводного вала задается следующей формулой (46).
[0176] [Формула 46]

[0177] где с1 и с2 в формуле (46) задаются следующей формулой (47).
[0178] [Формула 47]

[0179] Из формул (38), (40), (41) и (42) характеристика перехода от скорости вращения ωm электродвигателя к угловой скорости ωw вращения ведущего колеса получается как указано в следующей формуле (48).
[0180] [Формула 48]

[0181] Из формул (43), (44) и (48) характеристика перехода от крутящего момента Tm электродвигателя к угловой скорости ωw вращения ведущего колеса задается следующей формулой (49).
[0182] [Формула 49]

[0183] Из формул (46) и (49) характеристика перехода от крутящего момента Td приводного вала к угловой скорости ωw вращения ведущего колеса задается следующей формулой (50).
[0184] [Формула 50]

[0185] Здесь формула (50) преобразуется в следующую формулу (51).
[0186] [Формула 51]

[0187] Следовательно, из формул (50) и (51) угловая скорость ωd кручения приводного вала задается следующей формулой (52).
[0188] [Формула 52]
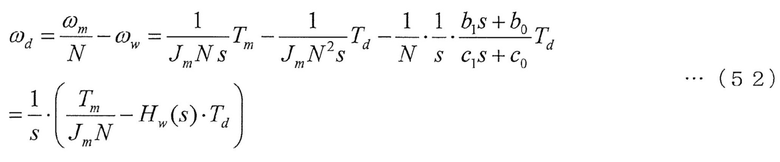
[0189] где Hw(s) в формуле (52) задается следующей формулой (53).
[0190] [Формула 53]

[0192] где v1, v0, w1 и w0 в формуле (53) задаются следующей формулой (54).
[0192] [Формула 54]
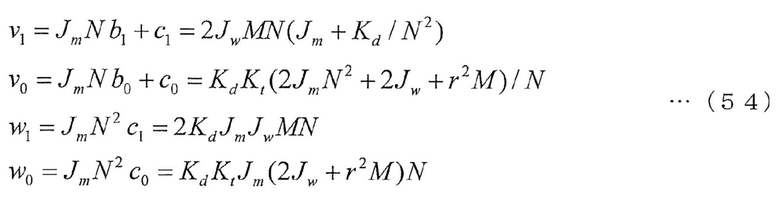
[0193] Формула (54) может быть преобразована в следующую формулу (55).
[0194] [Формула 55]

[0195] Здесь в формуле (55) ζp – коэффициент демпфирования системы передачи крутящего момента приводного вала, а ωp – собственная частота вибрации системы передачи крутящего момента приводного вала.
[0196] Кроме того, рассматриваются полюсы и нулевые точки формулы (55). Поскольку α≈c0/c1, следующая формула (56) получается с помощью устранения полюсов-нулей.
[0197] [Формула 56]

[0198] где gt в формуле (56) задано следующей формулой (57).
[0199] [Формула 57]

[0200] Здесь, значение Tmf* команды окончательного крутящего момента может быть задано следующей формулой (58).
[0201] [Формула 58]

[0202] Затем, значение Tmf* команды окончательного крутящего момента может быть заменено, как указано в следующей формуле (59).
[0203] [Формула 59]

[0204] Затем формула (59) подставляется в формулу (56), задавая, что крутящий момент Tm двигателя = значение Tmf* команды окончательного крутящего момента (Tm=Tmf*), так что формула (56) может быть переформулирована так, как задано следующей формулой (60).
[0205] [Формула 60]

[0206] Отклик модели от крутящего момента электродвигателя на крутящий момент приводного вала задается следующей формулой (61).
[0207] [Формула 61]

[0208] Когда отклик модели задается формулой (61), условие, при котором характеристика перехода (формула (60)) от значения Tmf* команды окончательного крутящего момента к крутящему моменту Td приводного вала и отклик модели согласовываются с друг другом, задается следующей формулой (62).
[0209] [Формула 62]

[0210] Затем, применяя вышеуказанные формулы (37)–(53), моделируется мертвая зона (модель с мертвой зоной), которая имитирует характеристику люфта передачи от электродвигателя к приводным валам. Тогда крутящий момент Td приводного вала с учетом модели с мертвой зоной может быть задан следующей формулой (63).
[0211] [Формула 63]
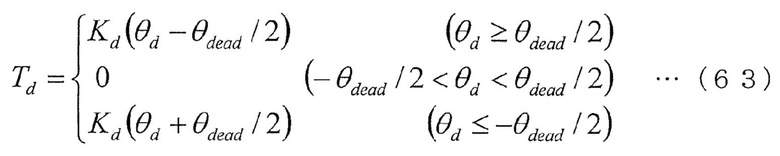
[0212] где θdead – общая величина люфта передачи от двигателя к приводным валам.
[0213] Фиг. 16 является блок–схемой управления для пояснения процесса вычисления управления демпфированием вибрации, выполняемого на этапе S203. Процесс вычисления управления демпфированием вибрации этого варианта осуществления выполняется с использованием F/F–компенсатора 1501, F/B–компенсатора 1502 и сумматора 1503.
[0214] Используя значение Tm* команды целевого крутящего момента в качестве входных данных, F/F–компенсатор 1501 вычисляет первое значение Tm1* команды крутящего момента и оцененное значение ω˄m угловой скорости вращения электродвигателя для первого значения Tm1* команды крутящего момента.
[0215] F/B-компенсатор 1502 вычисляет второе значение Tm2* команды крутящего момента, используя в качестве входных данных оцененное значение ω˄m угловой скорости вращения электродвигателя, детектированное значение ωm скорости вращения электродвигателя и значение Tmr1 команды тормозной/движущей силы.
[0216] Сумматор 1503 добавляет первое значение Tm1* команды крутящего момента и второе значение Tm2* команды крутящего момента, чтобы вывести значение Tmf* команды окончательного крутящего момента.
[0217] Фиг. 17 является блок–схемой управления, иллюстрирующей подробности F/F–компенсатора 1501, показанного на фиг. 16. F/F–компенсатор 1501 состоит из блока 1601 F/B-вычисления угловой скорости кручения приводного вала и модели 1602 транспортного средства. Следует отметить, что F/F–компенсатор 1501, показанный здесь, является таким же, как F/F–компенсатор, раскрытый в международной публикации № WO 2013/157315.
[0218] Модель 1602 транспортного средства состоит из модели с мертвой зоной, которая имитирует параметры транспортного средства (см. фиг. 15) и люфт передачи от электродвигателя 4 к приводным валам 8, применяя формулы (37)–(48). В модели 1602 транспортного средства крутящий момент Td приводного вала с учетом характеристики мертвой зоны (модель с мертвой зоной), указанной блоком 1603 мертвой зоны, вычисляется с использованием приведенной выше формулы (63).
[0219] Здесь в таком событии, как ускорение транспортного средства от выбега или замедления, возникает период мертвой зоны, в течение которого крутящий момент приводного двигателя не передается на приводные валы из–за влияния люфта передачи. В связи с этим, путем вычисления первого значения команды крутящего момента с использованием модели 1602 транспортного средства, в которой учитывается период мертвой зоны, крутящим моментом приводного двигателя управляют так, чтобы он был приблизительно равен нулю в периоде мертвой зоны и увеличивался в момент времени, когда зубчатые колеса сцепляются с друг с другом. Поэтому, в случае, когда зубчатые колеса расцеплены из–за влияния люфта передачи, возможно подавить удар, когда зубчатые колеса снова входят в зацепление друг с другом.
[0220] Используя первое значение команды крутящего момента в качестве входных данных, модель 1602 транспортного средства вычисляет оцененное значение ω˄d угловой скорости кручения приводного вала и оцененное значение ω˄m угловой скорости вращения электродвигателя.
[0221] Затем, оцененное значение угловой скорости вращения электродвигателя, выводимое из модели 1602 транспортного средства, вводится в F/B–компенсатор 1502 (см. фиг. 16), и оцененное значение ω˄d угловой скорости кручения приводного вала вводится в блок 1601 F/B-вычисления угловой скорости кручения приводного вала.
[0222] Блок 1601 F/B-вычисления угловой скорости кручения приводного вала включает в себя усилитель 1604 обратной связи (коэффициент k1 F/B-усиления) и вычитатель 1605. Блок 901 F/B-вычисления угловой скорости кручения приводного вала вычисляет первое значение команды крутящего момента, используя в качестве входных данных значение Tm1* команды целевого крутящего момента и оцененное значение ω˄d угловой скорости кручения приводного вала.
[0223] Используя оцененное значение ω˄d угловой скорости кручения приводного вала в качестве входных данных, усилитель 1604 обратной связи вычисляет значение путем умножения оцененного значения ω˄d угловой скорости кручения приводного вала на коэффициент k1 F/B-усиления, который вычисляется путем применения вышеуказанной формулы (62) на основе коэффициента ζr1 демпфирования в соответствии с откликом модели в периоде, отличном от периода мертвой зоны, и выводит вычисленное значение в вычитатель 1605.
[0224] Затем вычитатель 1605 вычитает выходное значение усилителя 1604 обратной связи из значения команды целевого крутящего момента для вычисления первого значения команды крутящего момента. Первое значение команды крутящего момента выводится в модель 1602 транспортного средства и в сумматор 1503, показанный на фиг. 16.
[0225] Фиг. 18 является блок–схемой управления, иллюстрирующей подробности F/B–компенсатора 1502, показанного на фиг. 16. F/B–компенсатор 1502 состоит из усилителя 1701 (коэффициент K усиления), блока 1702 управления, сумматоров 1703, 1705, блока 1704 управления, вычитателя 1706 и блока 1707 управления.
[0226] Коэффициент K усиления предназначен для регулировки запаса прочности (запаса усиления, запаса по фазе) системы управления с обратной связью и устанавливается на значение, равное или меньшее 1.
[0227] Блок 1702 управления представляет собой фильтр, состоящий из характеристики Gp(s) перехода, заданной приведенной выше формулой (44). Блок 1702 управления вычисляет оцененное значение ω˄m1 угловой скорости вращения электродвигателя, используя в качестве входных данных второе значение команды крутящего момента перед регулировкой усиления посредством коэффициента K усиления фильтра и используя характеристику Gp(s) перехода.
[0228] Сумматор 1703 выводит в сумматор 1705 значение, полученное путем суммирования оцененного значения ω˄m угловой скорости вращения электродвигателя, вычисленного моделью 1602 транспортного средства, включенной в F/F–компенсатор 1501, и оцененного значения ω˄m1 угловой скорости вращения электродвигателя качестве выхода блока 1702 управления.
[0229] Блок 1704 управления представляет собой фильтр, состоящий из характеристики Gprf(s) перехода, заданной приведенной выше формулой (26). Блок 1704 управления вычисляет оцененное значение ω˄m2 угловой скорости вращения электродвигателя, используя значение Tmr1* команды тормозной/движущей силы в качестве ввода и используя характеристику Gprf(s) перехода.
[0230] Затем в сумматоре 1705 значение, полученное путем сложения оцененного значения ω˄m угловой скорости вращения электродвигателя и оцененного значения ω˄m1 угловой скорости вращения электродвигателя, и оцененное значение ω˄m2 угловой скорости вращения электродвигателя суммируются вместе. Следовательно, оцененное значение угловой скорости вращения переднего электродвигателя, вычисленное на основе первого значения команды крутящего момента, корректируется на основании значения команды тормозной/движущей силы, указывающего тормозной/движущий крутящий момент для задних ведущих колес, таким образом вычисляя оцененное значение ω˄m3 окончательной угловой скорости вращения электродвигателя.
[0231] Вычитающее устройство 1706 выводит в блок 1707 управления отклонение между оцененным значением и детектированным значением угловой скорости вращения электродвигателя, полученное вычитанием угловой скорости ωm вращения электродвигателя из оцененного значения ω˄m3 окончательной угловой скорости вращения электродвигателя.
[0232] Блок 1707 управления представляет собой фильтр Hf(s)/Gp(s), состоящий из обратной характеристики для характеристики Gp(s) перехода объекта управления и полосового фильтра Hf(s). Полосовой фильтр Hf(s) сконфигурирован путем применения вышеуказанной формулы (34), как в первом варианте осуществления. Блок 1707 управления вычисляет второе значение команды крутящего момента, используя в качестве входных данных отклонение между оцененным значением и детектированным значением угловой скорости вращения электродвигателя, которое является выводом вычитателя 1706, и используя фильтр Hf(s)/Gp(s).
[0233] Характеристика Gprf(s) перехода объекта управления, используемого в блоке 1704 управления, может быть аппроксимирована фильтром, сконфигурированным путем применения следующей формулы (64), которая подразумевает, что частоты крутильной вибрации передних и задних ведущих колес становятся частотой среза. Благодаря аппроксимации таким фильтром вычислительная нагрузка может быть уменьшена. Хотя в следующей формуле (64) рассматриваются частоты крутильной вибрации как передних, так и задних ведущих колес, характеристика Gprf(s) перехода может быть аппроксимирована фильтром с учетом только частоты крутильной вибрации по меньшей мере одного из ведущих колес.
[0234] [Формула 64]

[0235] Характеристика Gprf(s) перехода объекта управления, используемая в блоке 1704 управления, может быть аппроксимирована фильтром, сконфигурированным путем применения следующей формулы (65), которая подразумевает только характеристику элемента в устойчивом состоянии (статическую характеристику). Следовательно, поскольку оцененное значение ω˄m2 угловой скорости вращения электродвигателя может быть вычислено путем регулировки усиления без использования модели транспортного средства, можно уменьшить программную вычислительную нагрузку контроллера 2 электродвигателя.
[0236] [Формула 65]

[0237] Кроме того, при наличии характеристики, в которой коэффициент демпфирования из–за частоты крутильной вибрации становится меньше 1, блок 1704 управления может использовать вместо характеристики Gprf(s) перехода характеристику Grrf(s) перехода, заданную приведенной выше формулой (29), в которой коэффициент затухания ζ (ζpr, ζpf) приближается к 1. То есть, имея характеристику, в которой коэффициент демпфирования из–за частоты крутильной вибрации становится меньше 1, коэффициент демпфирования ζ (ζpr, ζpf) может быть установлен на значение, равное или большее 1. В функции перехода угловой скорости вращения электродвигателя для электродвигателя переднего привода от задних ведущих колес, когда имеется характеристика, в которой коэффициент демпфирования из–за частоты крутильной вибрации в знаменателе меньше 1, существует такая характеристика, что величина коррекции угловой скорости вращения электродвигателя (оцененное значение ω˄m2 угловой скорости вращения электродвигателя) становится колебательной в соответствии с изменениями тормозной/движущей силы. В этом случае возможно подавить колебательную характеристику величины коррекции угловой скорости вращения электродвигателя, установив коэффициент демпфирования равным или превышающим 1.
[0238] Кроме того, было описано, что в третьем варианте осуществления характеристика Gp(s) перехода, используемая в блоке 1702 управления и блоке 1707 управления, сконфигурирована на основе модели транспортного средства 2WD, заданной вышеупомянутой формулой (44). Однако, как и в первом варианте осуществления, характеристика Gp(s) перехода может быть сконфигурирована путем применения вышеупомянутой формулы (12), которая основана на модели транспортного средства 4WD с учетом характеристик передней и задней движущей силы. Используя модель транспортного средства 4WD, которая учитывает не только передние ведущие колеса, но и задние ведущие колеса, угловая скорость вращения электродвигателя может быть оценена более точно.
[0239] Здесь результаты управления демпфированием вибрации устройством управления для электрического транспортного средства третьего варианта осуществления будут описаны со ссылкой на фиг. 19.
[0240] Фиг. 19 является временной диаграммой для сравнения результатов управления устройства управления для электрического транспортного средства в соответствии с третьим вариантом осуществления и результатами управления согласно предшествующему уровню техники. На чертеже значение Tmf* команды окончательного крутящего момента, значение Tmr1 команды тормозной/движущей силы, второе значение команды крутящего момента и продольное ускорение транспортного средства соответственно показаны в этом порядке сверху. На чертеже сплошные линии указывают результаты управления в соответствии с третьим вариантом осуществления, а пунктирные линии указывают результаты управления в соответствии с предшествующим уровнем техники. Следует отметить, что, поскольку нет никакой разницы между предшествующим уровнем техники и этим вариантом осуществления, значение Tm1 * команды тормозной/движущей силы указано пунктирной линией.
[0241] Фиг. 19 иллюстрирует результаты управления в транспортном средстве, являющемся транспортным средством 2WD с электродвигателем, в котором тормозная/движущая сила (например, тормозной момент, выходная мощность двигателя или тому подобное) также вводится в ведущие колеса, отличные от ведущих колес, с которыми соединен электродвигатель. В частности, фиг. 19 иллюстрирует результаты управления, когда водитель быстро нажимает акселератор из остановленного состояния транспортного средства, так что значение команды переднего целевого крутящего момента и значение команды тормозной/движущей силы для разных ведущих колес увеличиваются для ускорения транспортного средства.
[0242] Сначала в момент времени t1 значение команды переднего окончательного крутящего момента изменяется на шаг путем нажатия водителем педали акселератора.
[0243] Затем в предшествующем уровне техники (пунктирные линии), поскольку не учитываются как передние, так и задние тормозные/движущие силы, детектированное значение скорости вращения переднего электродвигателя становится больше, чем оцененное системой управления с обратной связью, соответствующей добавлению движущей силы от различных ведущих колес. Затем, чтобы компенсировать крутящий момент, соответствующий детектированной скорости вращения электродвигателя, превышающей оцененную, значение команды крутящего момента корректируется в отрицательную сторону крутящего момента (в направлении уменьшения крутящего момента электродвигателя), чтобы препятствовать ускорению от момента времени t1 до t3 (см. второе значение команды крутящего момента). Следовательно, значение Tmf* команды переднего окончательного крутящего момента не может быть выведено в качестве значения команды крутящего момента, требуемого водителем. В результате видно, что продольное ускорение транспортного средства ограничено около момента времени t2 по сравнению с ускорением в момент времени t3.
[0244] Таким образом, в предшествующем уровне техники, поскольку излишняя компенсация для подавления вибрации выводится из F/B–компенсатора управления демпфированием вибрации, чтобы препятствовать ускорению транспортного средства, невозможно получить ускорение или замедление, предусмотренные водителем на основе операции ускорения или операции торможения водителя, и, следовательно, водитель получает ощущение несоответствия.
[0245] В отличие от этого, согласно устройству управления для электрического транспортного средства третьего варианта осуществления (сплошные линии), даже когда значение команды переднего окончательного крутящего момента изменяется на шаг в момент времени t1, второе значение команды крутящего момента равно нулю от момента времени t1 до t3. Поэтому даже с устройством управления для электрического транспортного средства в соответствии с третьим вариантом осуществления может быть подавлено то, что излишняя компенсация для подавления вибрации (отрицательный крутящий момент) выводится из F/B–компенсатора управления демпфированием вибрации, как в предшествующем уровне техники (прерывистые линии). Следовательно, с момента времени t1 до t3 значение Tmf* команды переднего окончательного крутящего момента может быть выведено в качестве значения команды крутящего момента, подразумеваемого водителем.
[0246] В результате, даже когда тормозная/движущая сила формируется на разных ведущих колесах, возможно получить ускорение, намеченное водителем. Этот эффект достигается путем корректировки оценочного значения угловой скорости вращения электродвигателя с использованием фильтра, сконфигурированного на основе функции перехода угловой скорости вращения электродвигателя для ведущих колес, в соответствии со значением команды тормозной/движущей силы для разных ведущих колес.
[0247] Хотя были описаны результаты управления со стороны привода электрического транспортного средства 2WD, результаты управления во время регенеративной операции одинаковы. То есть в предшествующем уровне техники, когда электрическое транспортное средство 2WD замедляется, второе значение команды крутящего момента корректируется в положительную сторону крутящего момента излишней компенсацией для подавления вибрации, так что замедление сдерживается, и, поэтому невозможно получить замедление, намеченное водителем. В отличие от этого, в соответствии с устройством управления для электрического транспортного средства третьего варианта осуществления, подобно управлению со стороны привода, описанному выше, поскольку возможно подавить вывод излишней компенсации для подавления вибрации (положительного крутящего момента) из F/B-компенсатора управления демпфированием вибрации, возможно реализовать намеченное водителем замедление.
[0248] Как описано выше, в соответствии с устройством управления для электрического транспортного средства третьего варианта осуществления в вычислении с прямой связью угловая скорость кручения приводного вала вычисляется из значения команды крутящего момента электродвигателя с использованием модели с мертвой зоной транспортного средства (модели 1602 транспортного средства), имеющей мертвую зону, в которой крутящий момент первого электродвигателя (электродвигателя переднего привода) не переходит в крутящий момент приводного вала, и первое значение команды крутящего момента вычисляется путем подачи обратно вычисленной угловой скорости кручения приводного вала к значению команды крутящего момента электродвигателя. Следовательно, крутящим моментом электродвигателя управляют так, чтобы он был приблизительно равен нулю в периоде мертвой зоны и увеличивался в момент, когда зубчатые колеса сцепляются друг с другом. В результате, в случае, когда зубчатые колеса расцеплены из–за влияния люфта передачи, возможно подавить удар, когда зубчатые колеса снова входят в зацепление друг с другом.
[0249] Кроме того, в соответствии с устройством управления для электрического транспортного средства третьего варианта осуществления фильтр с функцией перехода угловой скорости вращения первого электродвигателя (электродвигателя переднего привода) для второго ведущего колеса (заднего ведущего колеса) аппроксимируется фильтром, в котором частота крутильной вибрации по меньшей мере одного из первого ведущего колеса (переднего ведущего колеса) и второго ведущего колеса установлена на частоту среза. Следовательно, возможно уменьшить программную вычислительную нагрузку контроллера 2 электродвигателя.
[0250] Кроме того, в соответствии с устройством управления для электрического транспортного средства третьего варианта осуществления фильтр с функцией перехода угловой скорости вращения первого электродвигателя (электродвигателя переднего привода) для второго ведущего колеса (заднего ведущего колеса) аппроксимируется для формирования составляющей усиления характеристики перехода угловой скорости вращения первого электродвигателя для второго ведущего колеса. Следовательно, поскольку оцененное значение ω˄m2 угловой скорости вращения электродвигателя может быть вычислено путем регулировки усиления без использования модели транспортного средства, можно уменьшить программную нагрузку вычисления контроллера 2 электродвигателя.
[0251] Кроме того, согласно устройству управления для электрического транспортного средства по третьему варианту осуществления фильтр с функцией перехода угловой скорости вращения первого электродвигателя (электродвигателя переднего привода) для второго ведущего колеса (заднего ведущего колеса) имеет в знаменателе коэффициент демпфирования, обусловленный частотой крутильной вибрации, и когда имеется характеристика, в которой коэффициент демпфирования становится меньше 1, коэффициент демпфирования устанавливается равным значению, равному или большему 1. Следовательно, возможно подавить колебательную характеристику величины коррекции угловой скорости вращения электродвигателя.
[0252] Кроме того, в соответствии с устройством управления для электрического транспортного средства третьего варианта осуществления, модель транспортного средства 4WD, которая имитирует характеристику перехода от вводов крутящих моментов на первое ведущее колесо и второе ведущее колесо к угловым скоростям вращения электродвигателя для первого электродвигателя и второго электродвигателя, может использоваться в качестве модели Gp(s) транспортного средства. Используя модель транспортного средства, которая учитывает не только переднее ведущее колесо, но и заднее ведущее колесо, угловая скорость вращения электродвигателя может быть оценена более точно.
[0253] Четвертый вариант осуществления
Предполагается, что управляющее устройство для электрического транспортного средства этого варианта осуществления применяется к системной конфигурации 2, описанной выше. Далее процесс вычисления управления демпфированием вибрации, который выполняется на этапе S503, описанном выше, устройством управления для электрического транспортного средства четвертого варианта осуществления, будет описан со ссылкой на фиг. 20 и 21.
[0254] Фиг. 20 является одним примером блок–схемы конфигурации, которая реализует процесс вычисления управления демпфированием вибрации четвертого варианта осуществления. Блоки управления, показанные на фиг. 20 включают в себя F/F–компенсатор 1801, блок 1802 управления, блок 1803 управления, сумматоры 1804, 1805 и вычитатели 1806, 1807.
[0255] F/F–компенсатор 1801 выполняет процесс F/F–компенсации с использованием значения Tm1* команды переднего целевого крутящего момента и значения Tmr1* команды заднего целевого крутящего момента в качестве входных данных и с использованием модели транспортного средства 4WD. Следовательно, F/F–компенсатор 1801 вычисляет первое значение команды крутящего момента и второе значение команды крутящего момента и дополнительно вычисляет оцененное значение ω∧mf угловой скорости вращения переднего электродвигателя и оцененное значение ω˄mr угловой скорости вращения заднего электродвигателя. Подробности F/F–компенсатора 1801 будут описаны со ссылкой на фиг. 21.
[0256] Фиг. 21 является одним примером конфигурации блока управления, которая реализует процесс F/F–компенсации, выполняемый в F/F–компенсаторе 1801.
[0257] Как показано, F/F–компенсатор 1801 состоит из модели 1900 транспортного средства 4WD, блока 1901 F/B-вычисления угловой скорости кручения переднего приводного вала и блока 1902 F/B-вычисления угловой скорости кручения заднего приводного вала.
[0258] Модель 1900 транспортного средства 4WD сконфигурирована путем добавления модели 1903 с передней мертвой зоной и модели 1904 с задней мертвой зоной к модели 903 транспортного средства 4WD, показанной на фиг. 10, которая сконфигурирована эквивалентно уравнению движения (1)–(11) транспортного средства 4WD.
[0259] Модель 1903 с передней мертвой зоной представляет собой модель с мертвой зоной, которая имитирует параметры транспортного средства (см. фиг. 7) и характеристику люфта передачи от двигателя 2f переднего привода на переднее ведущее колесо 9f, и задана вышеприведенной формулой (63).
[0260] Модель 1904 с задней мертвой зоной является моделью с мертвой зоной, которая имитирует, подобно модели с передней мертвой зоной, параметры транспортного средства (см. фиг. 7) и характеристику люфта передачи от двигателя 2r заднего привода на переднее ведущее колесо 9r, и задана следующей формулой (66) путем применения приведенных выше формул (37)–(53).
[0261] [Формула 66]

[0262] Модель 1900 транспортного средства 4WD, сконфигурированная таким образом, использует первое значение команды крутящего момента и третье значение команды крутящего момента в качестве входных данных и вычисляет оцененное значение угловой скорости кручения переднего приводного вала, оцененное значение угловой скорости кручения заднего приводного вала, оцененное значение ω˄mf угловой скорости вращения переднего электродвигателя и оцененное значение ω˄mr угловой скорости вращения заднего электродвигателя.
[0263] Здесь в показанной модели 1900 транспортного средства 4WD движущая сила Fr для задних ведущих колес, вычисленная на основе третьего значения команды крутящего момента, добавляется к системе, которая вычисляет оцененное значение ω˄mf угловой скорости вращения переднего электродвигателя на основе первого значения команды крутящего момента. Следовательно, в модели транспортного средства 4WD оцененное значение угловой скорости вращения переднего электродвигателя, вычисленное на основе первого значения команды крутящего момента, может быть скорректировано на основе значения команды заднего целевого крутящего момента, указывающего тормозной/движущий крутящий момент для задних ведущих колес.
[0264] Блок 1901 F/B-вычисления угловой скорости кручения переднего приводного вала сначала умножает введенное оцененное значение угловой скорости кручения переднего приводного вала на коэффициент k1 усиления, который используется для согласования характеристики перехода от значения команды переднего окончательного крутящего момента к крутящему моменту переднего приводного вала и отклика модели друг с другом. Затем значение, полученное путем умножения оцененного значения угловой скорости кручения переднего приводного вала на коэффициент k1 усиления, вычитается из значения Tm1* команды переднего целевого крутящего момента, тем самым вычисляя первое значение команды крутящего момента. Коэффициент k1 усиления задан приведенной выше формулой (62).
[0265] Блок 1902 F/B-вычисления угловой скорости кручения заднего приводного вала сначала умножает оцененное значение угловой скорости кручения заднего приводного вала на коэффициент k2 усиления, который используется для согласования характеристики перехода от значения команды заднего окончательного крутящего момента к крутящему моменту заднего приводного вала и отклика модели друг с другом. Затем значение, полученное путем умножения оцененного значения угловой скорости кручения заднего приводного вала на коэффициент k2 усиления, вычитается из значения Tmr1* команды заданего целевого крутящего момента, тем самым вычисляя третье значение команды крутящего момента. Коэффициент k2 усиления задан следующей формулой (67).
[0266] [Формула 67]

[0267] Описание будет продолжено возвращаясь к фиг. 20. Сумматор 1806 вычитает угловую скорость ωmf вращения переднего электродвигателя из оцененного значения ω˄mf угловой скорости вращения переднего электродвигателя, чтобы вычислить отклонение между оцененным значением и детектированным значением угловой скорости вращения переднего электродвигателя, и выводит вычисленное значение в блок 1802 управления.
[0268] Блок 1802 управления состоит из полосового фильтра Hf(s), заданного вышеуказанной формулой (34), и обратной характеристики модели Gp(s) транспортного средства, заданной вышеуказанной формулой (19). Блок 1802 управления вычисляет второе значение команды крутящего момента, используя в качестве входных данных отклонение между оцененным значением и детектированным значением угловой скорости вращения переднего электродвигателя и умножая отклонение на Hf(s)/Gp(s).
[0269] Затем сумматор 1804 суммирует первое значение команды крутящего момента и второе значение команды крутящего момента для вычисления значения Tmf* команды переднего окончательного крутящего момента.
[0270] Аналогично, сумматор 1807 вычитает угловую скорость ωmr вращения заднего электродвигателя из оцененного значения ω˄mr угловой скорости вращения заднего электродвигателя, чтобы вычислить отклонение между оцененным значением и детектированным значением угловой скорости вращения заднего электродвигателя и выводит вычисленное значение в блок 1803 управления.
[0271] Блок 1802 управления состоит из полосового фильтра Hr(s), заданного приведенной выше формулой (35), и обратной характеристики модели Gp(s) транспортного средства, заданной приведенной выше формулой (19). Блок 1803 управления вычисляет четвертое значение команды крутящего момента, используя в качестве входных данных отклонение между оцененным значением и детектированным значением угловой скорости вращения заднего электродвигателя и умножая отклонение на Hr(s)/Gp(s).
[0272] Затем сумматор 1805 суммирует третье значение команды крутящего момента и четвертое значение команды крутящего момента для вычисления значения Tmrf* команды заднего окончательного крутящего момента.
[0273] Здесь, в транспортном средстве, имеющем множество ведущих колес, когда резонансные частоты крутильной вибрации приводного вала передних и задних ведущих колес отличаются друг от друга, крутильная вибрация приводного вала индуцируется на одном из ведущих колес из–за влияния отклонения крутящего момента другого ведущего колеса. Однако, как описано выше, с использованием модели 1900 транспортного средства, предназначенной для множества ведущих колес, и блоков 1901, 1902 F/B-вычисления угловой скорости кручения приводного вала, соответственно обеспеченных для множества ведущих колес, описанная выше крутильная вибрация приводного вала может быть подавлена. Следует отметить, что когда нет задержки или нарушения работы системы управления, возможно подавить крутильную вибрацию приводного вала передних и задних ведущих колес только с помощью F/F–компенсатора 1801.
[0274] Посредством значения Tmrf* команды заднего окончательного крутящего момента и значения Tmf* команды переднего окончательного крутящего момента, рассчитанных как описано выше, также возможно подавить вывод излишней компенсации для подавления вибрации из F/B–компенсатора управления демпфированием вибрации, как указано результатами управления, показанными на фиг. 9, описанной выше (см. четвертый вариант осуществления на фигуре), и, поэтому возможно получить ускорение, намеченное водителем, даже во время ускорения с использованием переднего и заднего ведущих колес.
[0275] Как описано выше, в соответствии с устройством управления для электрического транспортного средства четвертого варианта осуществления, когда электрическое транспортное средство включает в себя второй электродвигатель (электродвигатель заднего привода) в качестве источника энергии для второго ведущего колеса (заднего ведущего колеса), модель Gp(s) транспортного средства представляет собой модель транспортного средства 4WD, которая имитирует характеристику перехода от вводов крутящих моментов на первое ведущее колесо и второе ведущее колесо к угловым скоростям вращения электродвигателя для первого электродвигателя (электродвигателя переднего привода) и второго электродвигателя, и устройство управления вычисляет третье значение команды крутящего момента посредством вычисления с прямой связью на основе значения команды крутящего момента электродвигателя, детектирует угловую скорость вращения второго электродвигателя, вычисляет четвертое значение команды крутящего момента из отклонения между детектированным значением и оцененным значением угловой скорости вращения второго электродвигателя и управляет крутящим моментом второго электродвигателя в соответствии со вторым значением команды окончательного крутящего момента, полученным путем сложения третьего значения команды крутящего момента и четвертого значения команды крутящего момента вместе. В вычислениях с прямой связью устройство управления делит значение команды крутящего момента электродвигателя на первое значение команды целевого крутящего момента (значение команды переднего целевого крутящего момента) для первого ведущего колеса и второе значение команды целевого крутящего момента (значение команды заднего целевого крутящего момента) для второго ведущего колеса, вычисляет оцененное значение угловой скорости вращения первого электродвигателя, оцененное значение угловой скорости вращения второго электродвигателя, оцененное значение угловой скорости кручения приводного вала первого ведущего колеса и оцененное значение угловой скорости кручения приводного вала второго ведущего колеса с использованием первого значения команды целевого крутящего момента и второго значения команды целевого крутящего момента в качестве входных данных и с использованием модели 1900 транспортного средства 4WD, и корректирует оцененное значение угловой скорости вращения первого электродвигателя на основе второго значения команды целевого крутящего момента. Устройство управления вычисляет первое значение команды крутящего момента путем вычитания из первого значения команды целевого крутящего момента значения, полученного путем умножения оцененного значения угловой скорости кручения приводного вала первого ведущего колеса на предварительно определенный коэффициент усиления, и вычисляет третье значение команды крутящего момента путем вычитания из второго значения команды целевого крутящего момента значения, полученного путем умножения оцененного значения угловой скорости кручения приводного вала второго ведущего колеса на предварительно определенный коэффициент усиления.
[0276] Следовательно, возможно подавить вывод излишней компенсации для подавления вибрации из F/B–компенсатора управления демпфированием вибраций, и, поэтому, можно получить ускорение, намеченное водителем, даже во время ускорения с использованием передних и задних ведущих колес, и, кроме того, возможно подавить крутильную вибрацию приводного вала передних и задних ведущих колес.
[0277] Хотя были описаны устройства управления для электрического транспортного средства согласно вариантам осуществления согласно настоящему изобретению, настоящее изобретение не ограничено вышеописанными вариантами осуществления, и возможны различные модификации и применения. Например, хотя было описано, что устройство управления для электрического транспортного средства по первому варианту осуществления должно быть применено к транспортному средству 4WD системной конфигурации 2, оно также может быть применено к транспортному средству системной конфигурации 1. В этом случае значение Tmr1* команды заднего целевого крутящего момента (см. фиг. 6) обрабатывается как значение команды тормозной/движущей силы, которое вводится в F/B–компенсатор 1502 (см. фиг. 16) и блок 1704 управления (см. фиг. 18) системной конфигурации 1. Следовательно, даже в транспортном средстве системной конфигурации 1 эффект, эквивалентный эффекту в транспортном средстве системной конфигурации 2, может быть получен путем вычисления коррекционного оцененного значения угловой скорости вращения электродвигателя из значения команды тормозной/движущей силы в качестве значения команды заднего целевого крутящего момента.
[0278] В описании вышеописанных вариантов осуществления ведущее колесо в передней части транспортного средства упоминается как переднее ведущее колесо (первое ведущее колесо), а ведущее колесо в задней части транспортного средства упоминается как заднее ведущее колесо (второе ведущее колесо). Однако переднее и заднее из ведущих колес не обязательно совпадают с передней и задней частью транспортного средства. Ведущее колесо в задней части транспортного средства может называться передним ведущим колесом (первым ведущим колесом), а ведущее колесо в передней части транспортного средства может называться задним ведущим колесом (вторым ведущим колесом).
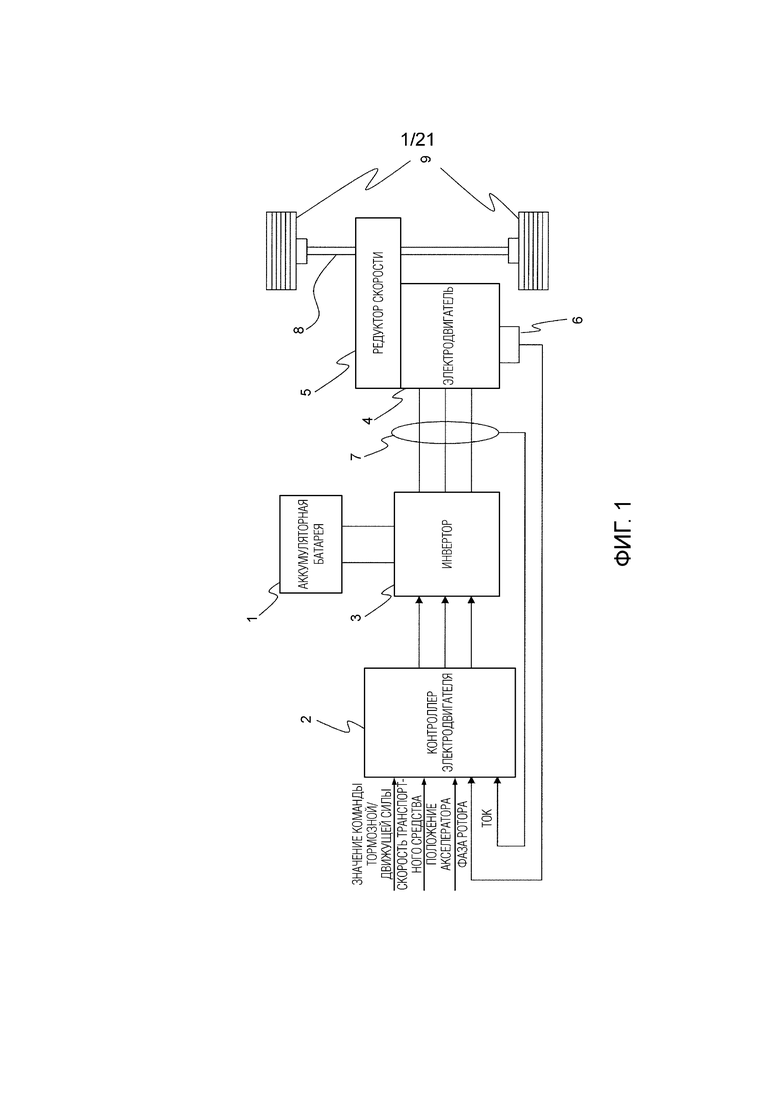
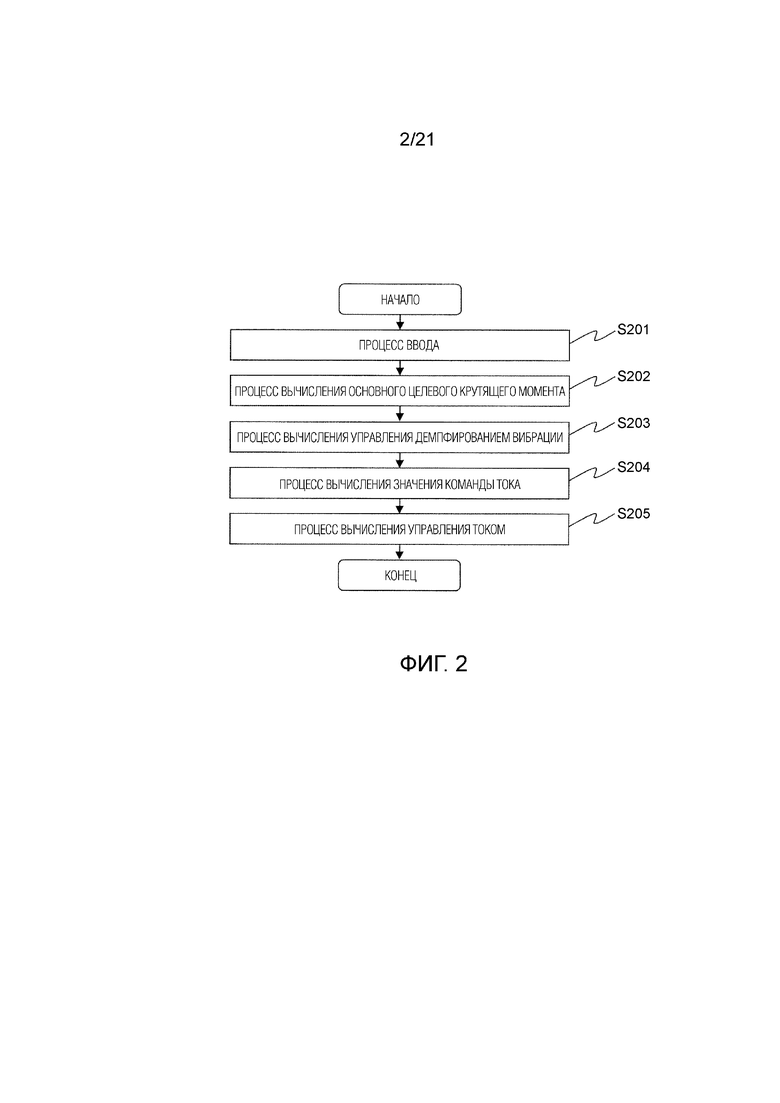
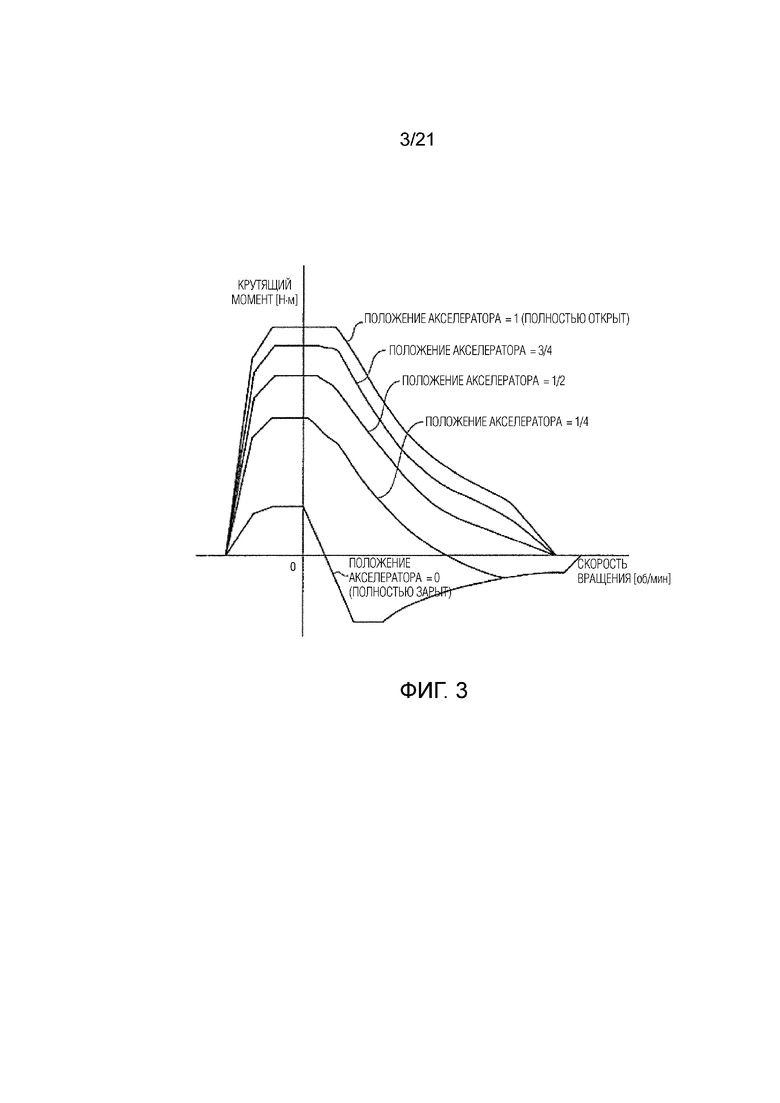
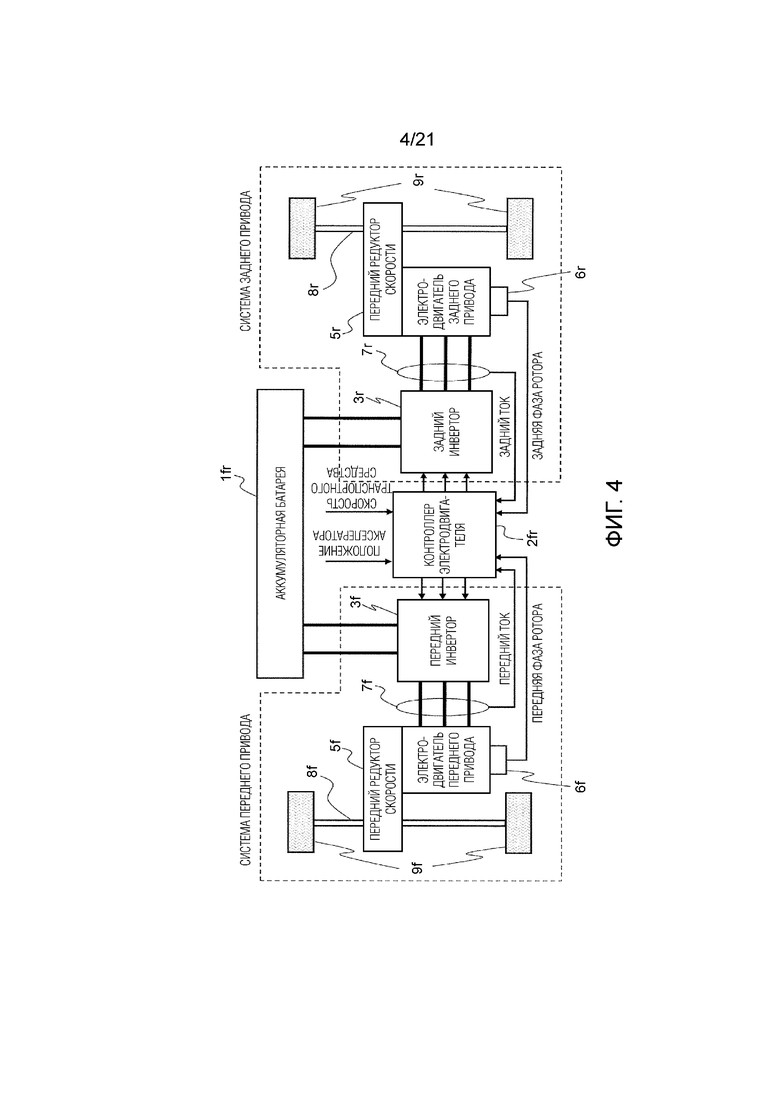
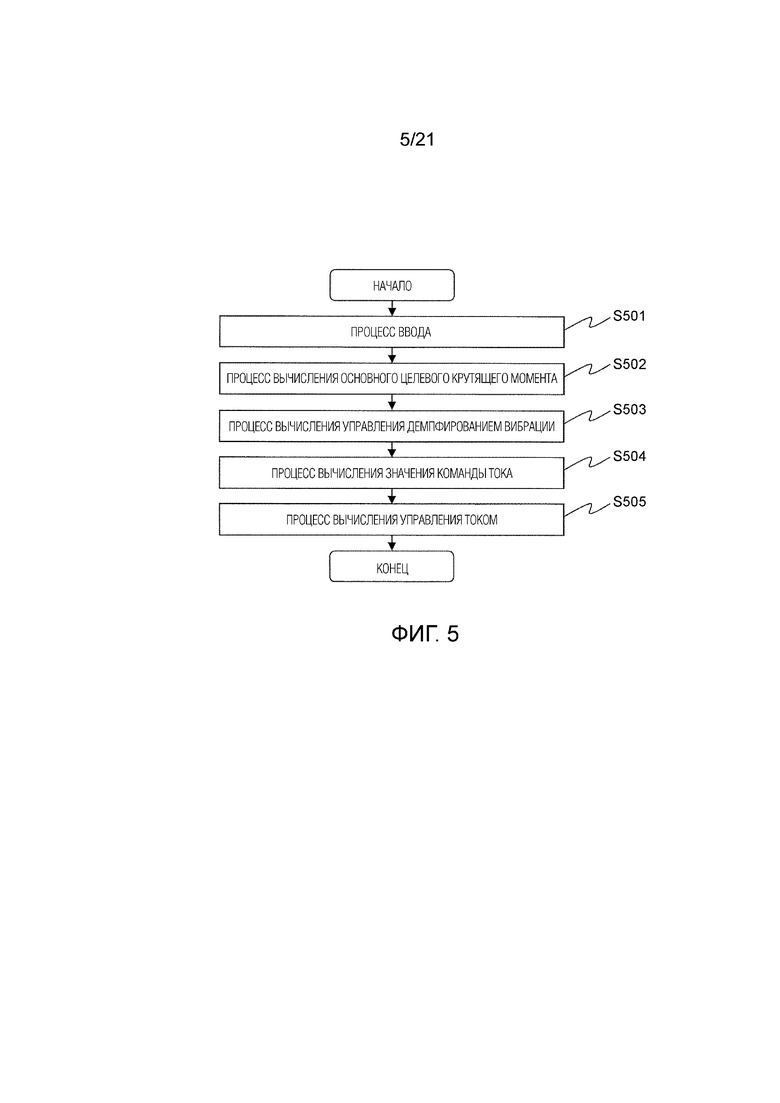
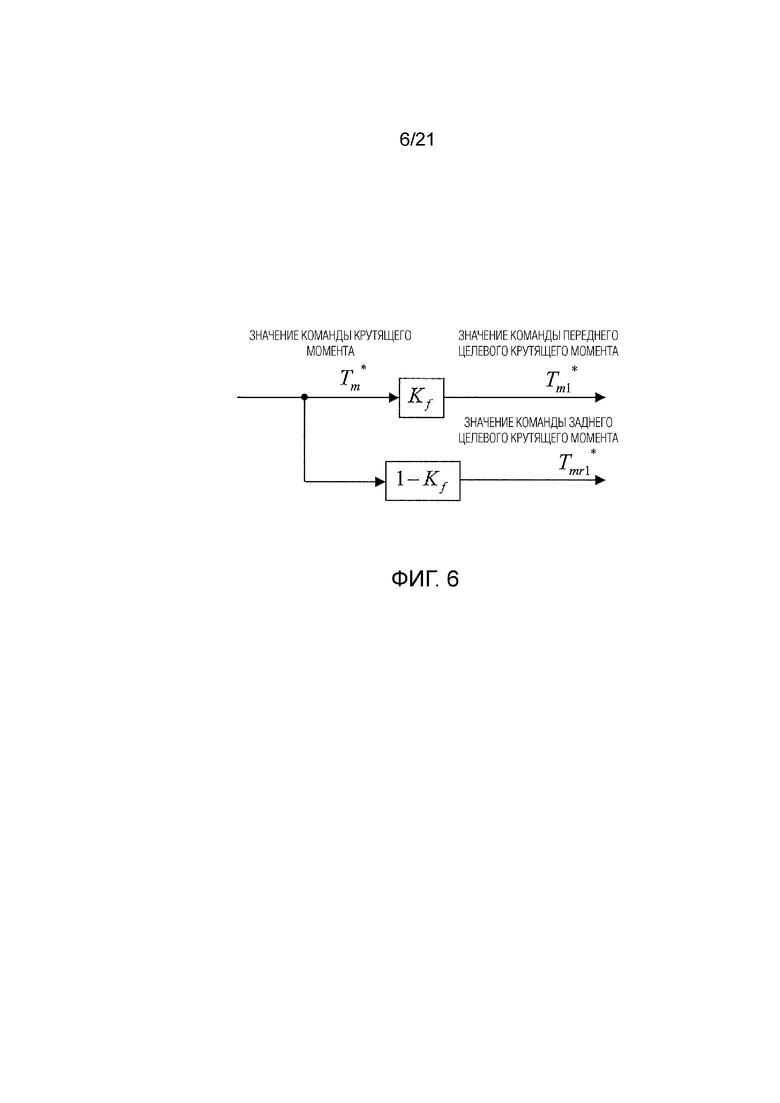
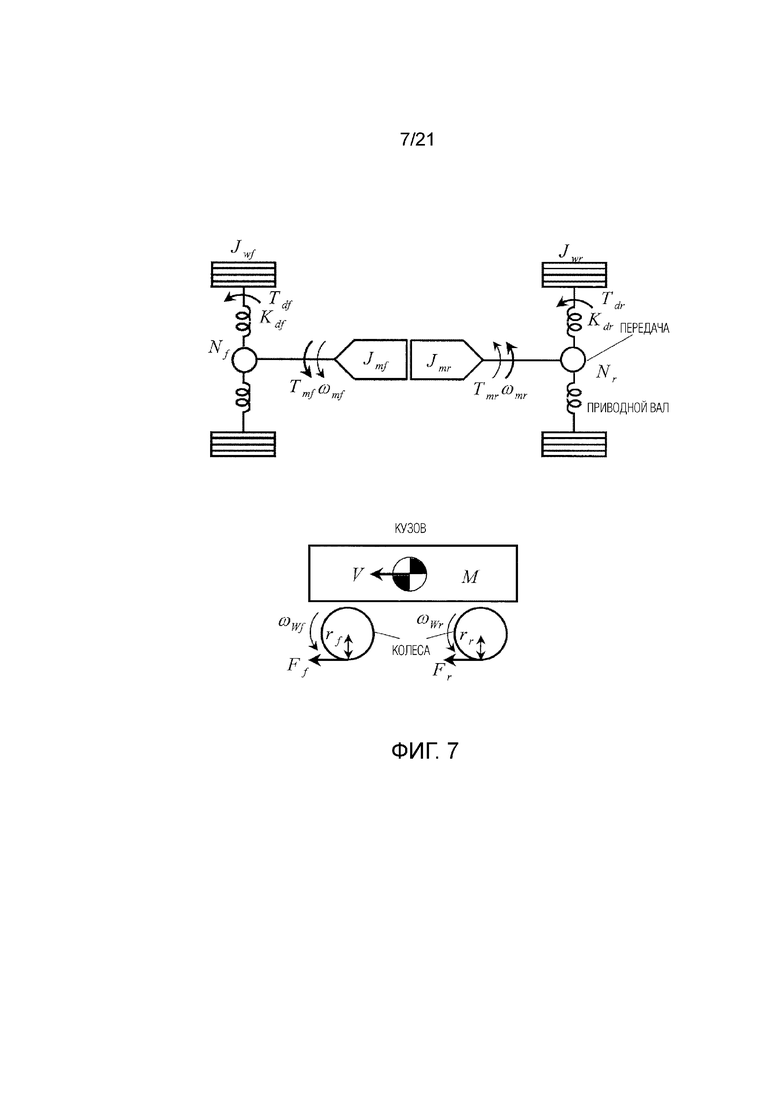
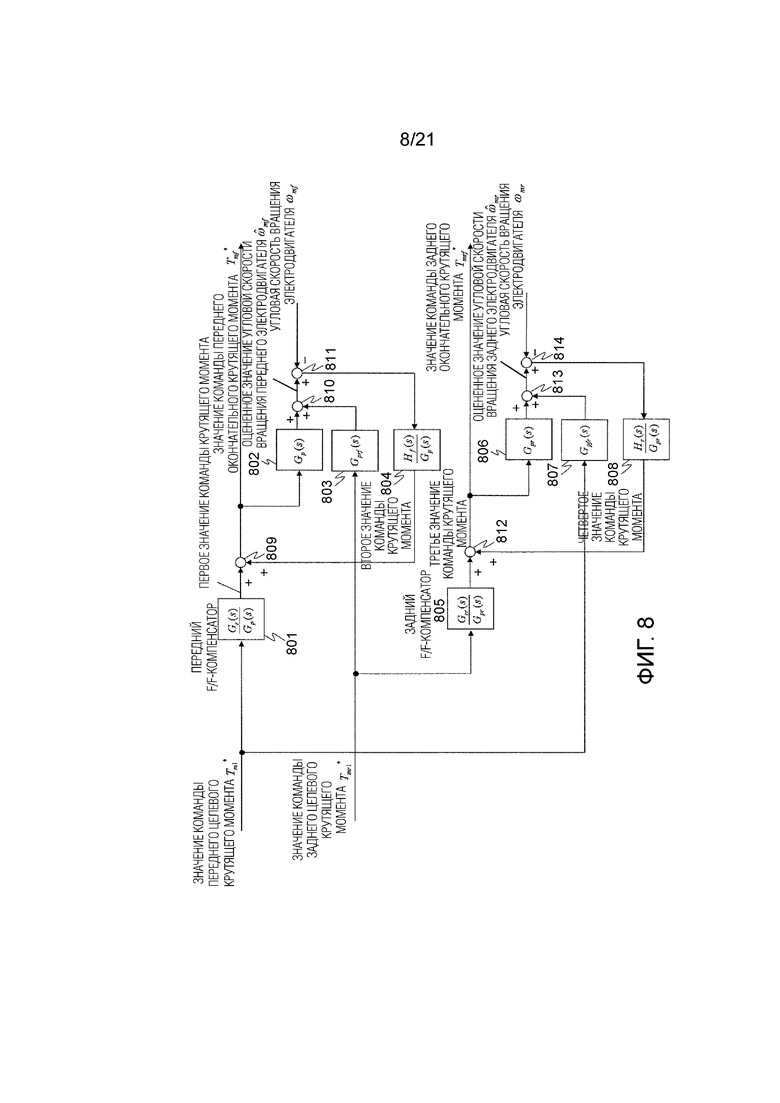
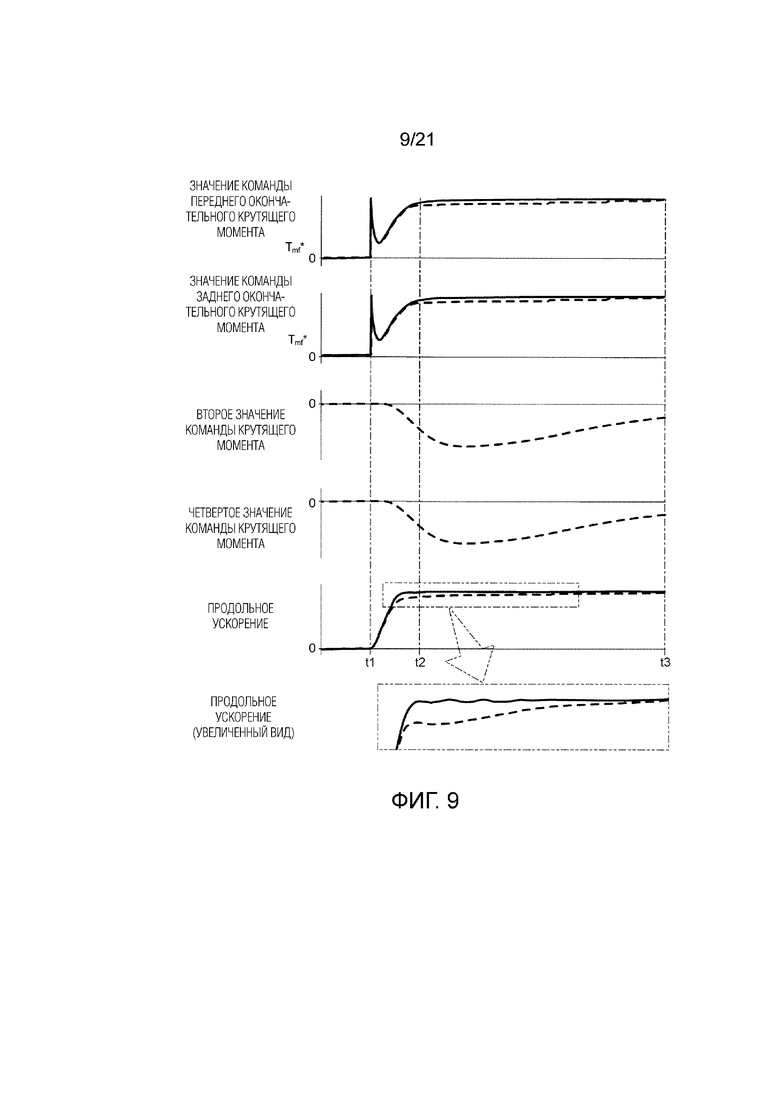
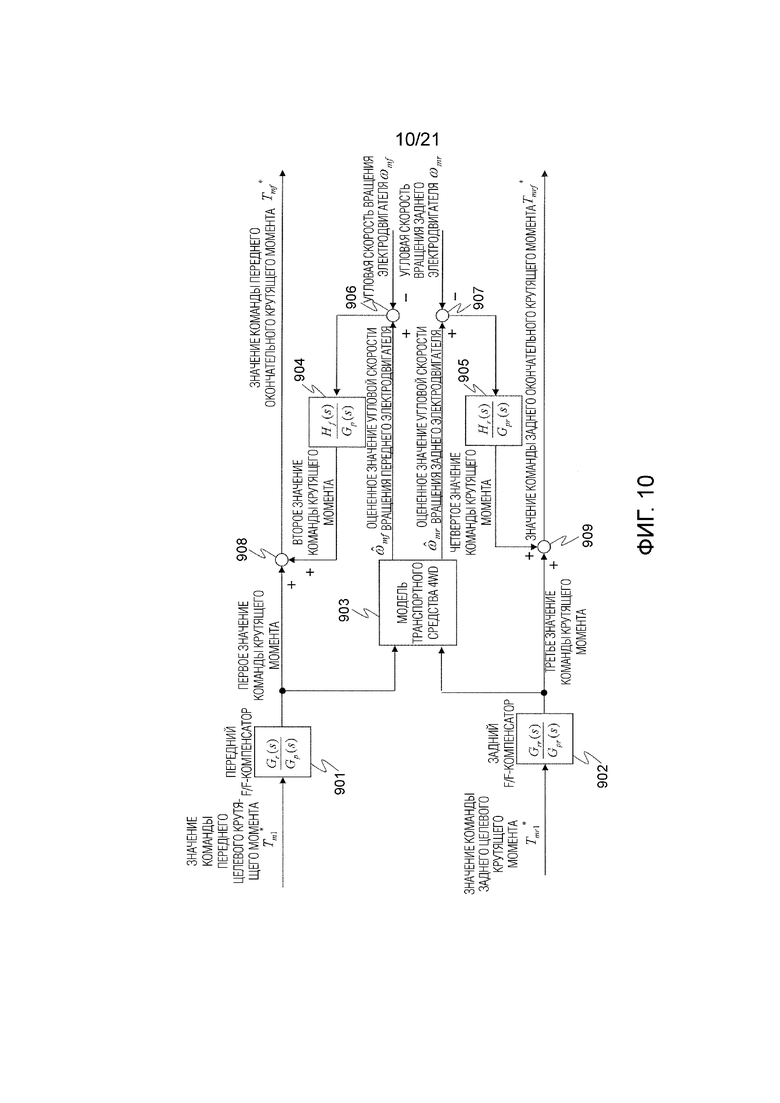
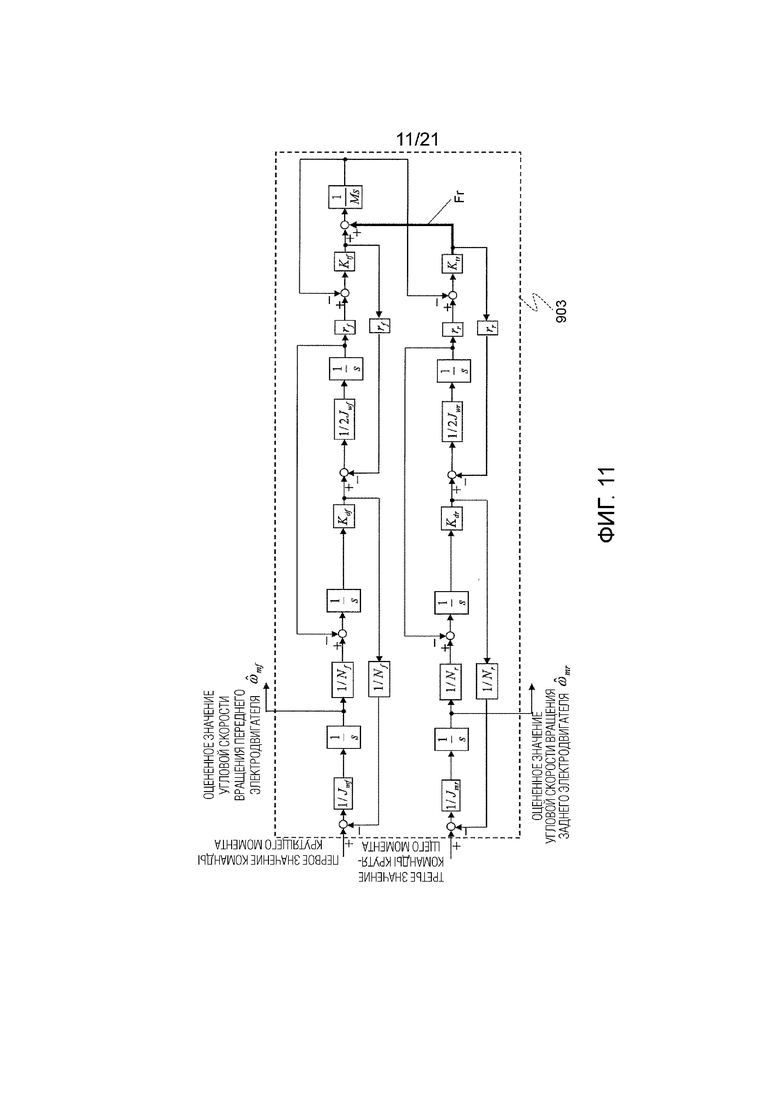
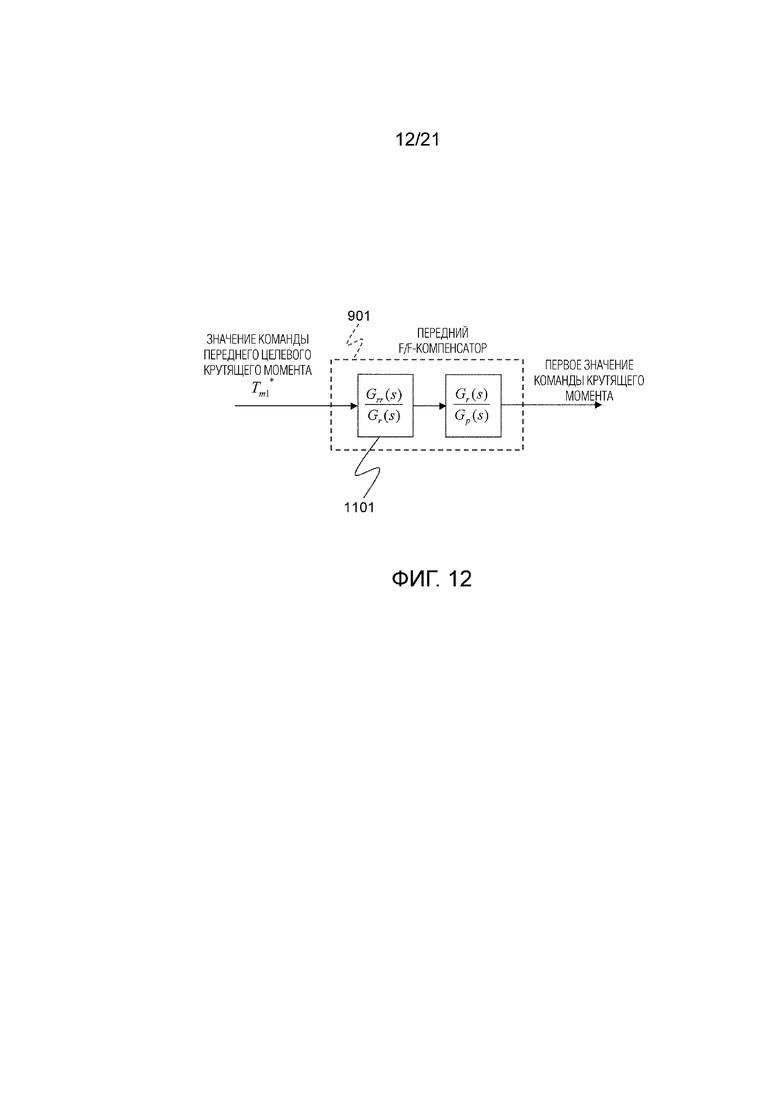
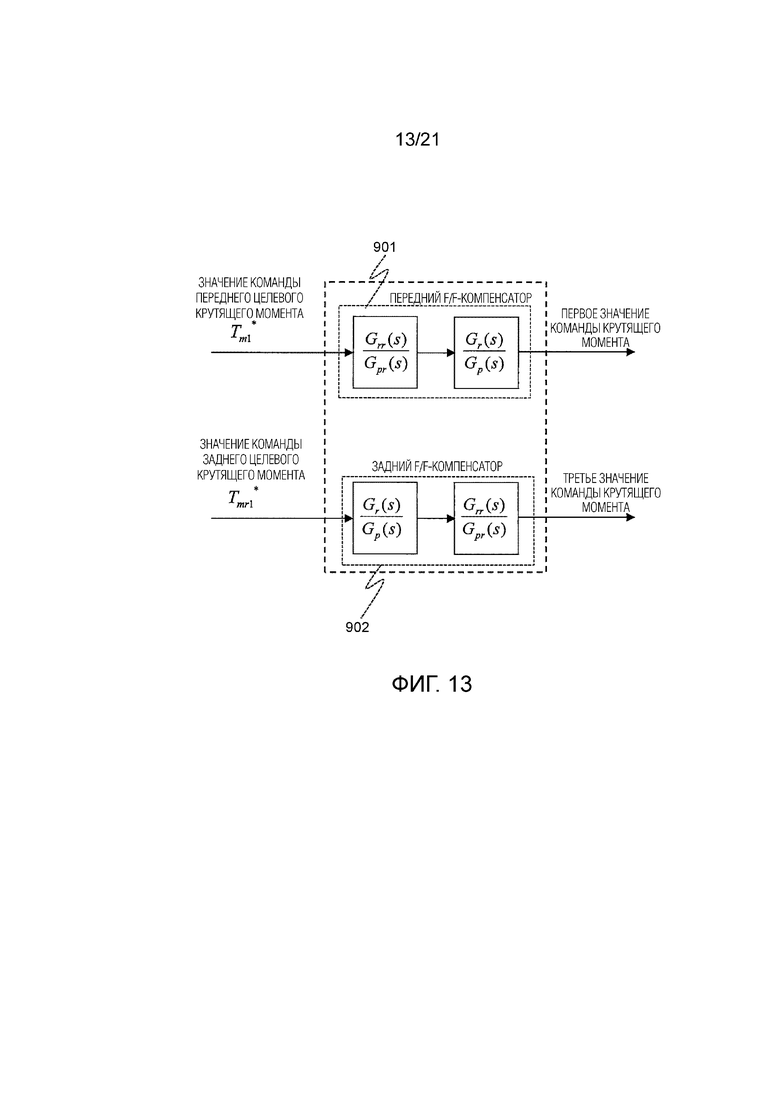
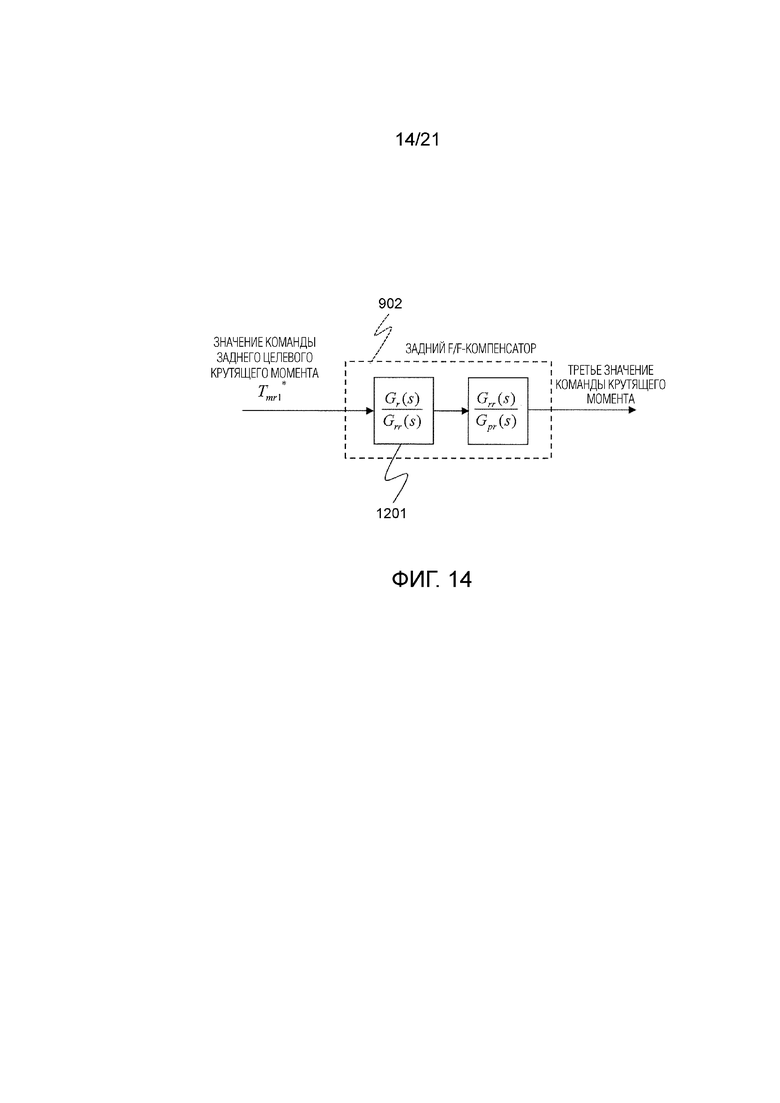
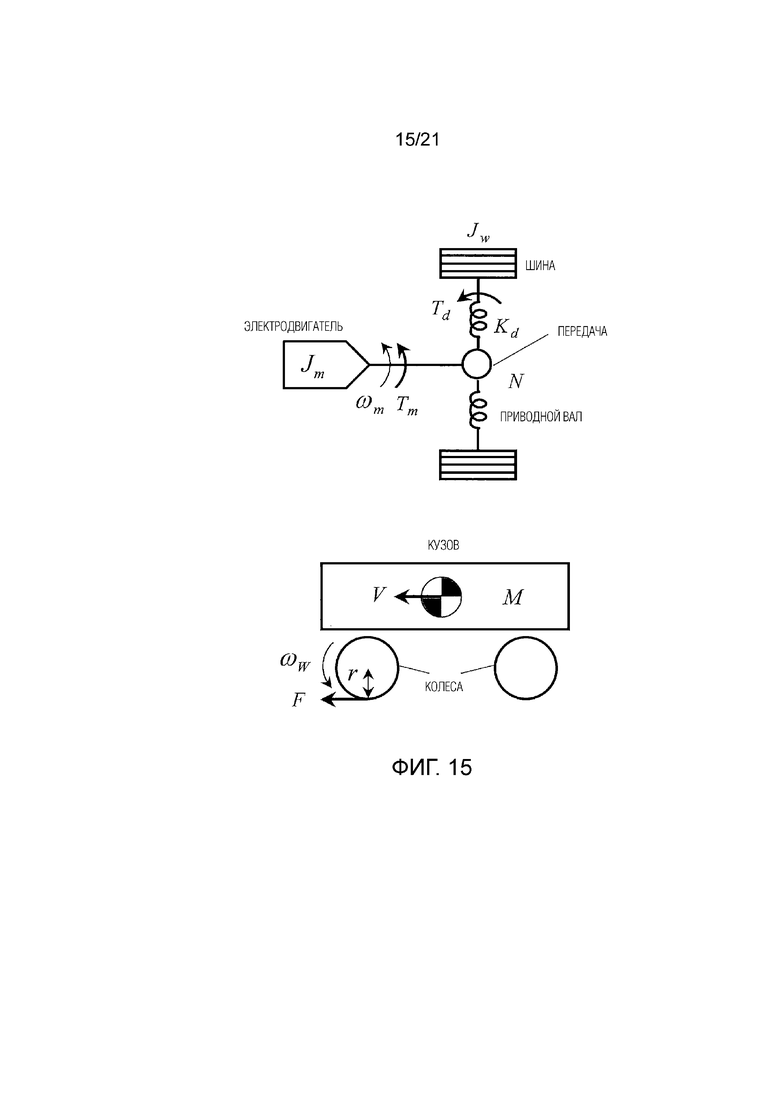
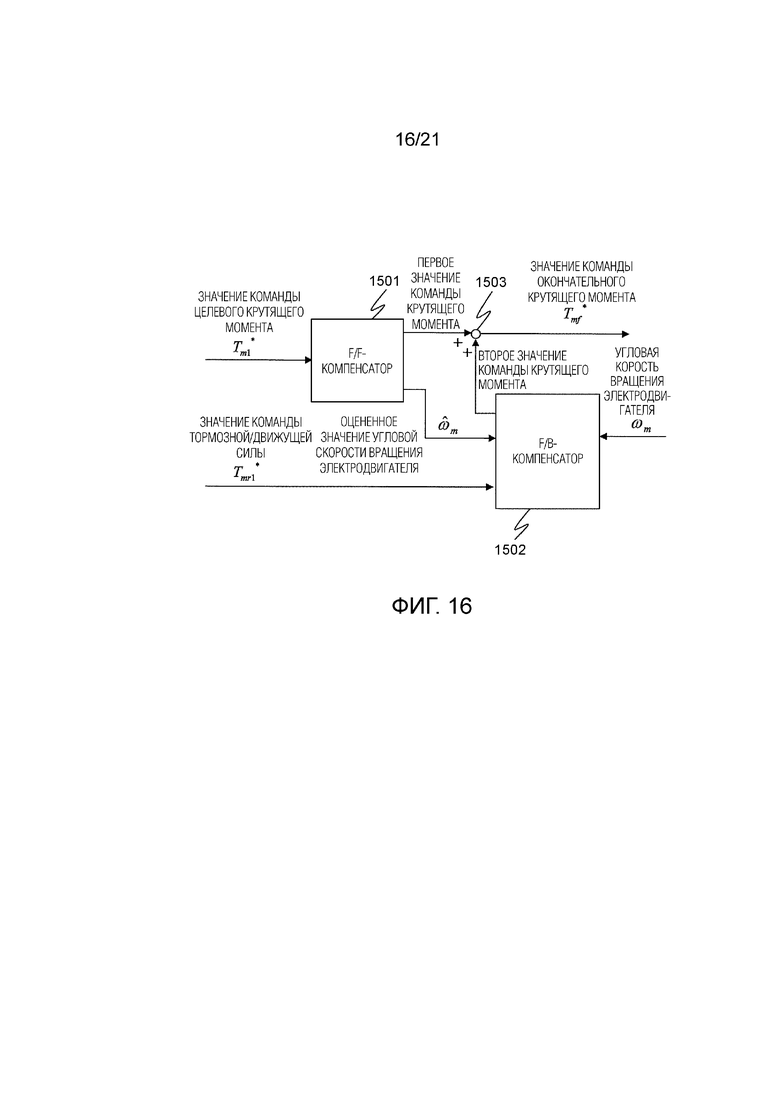
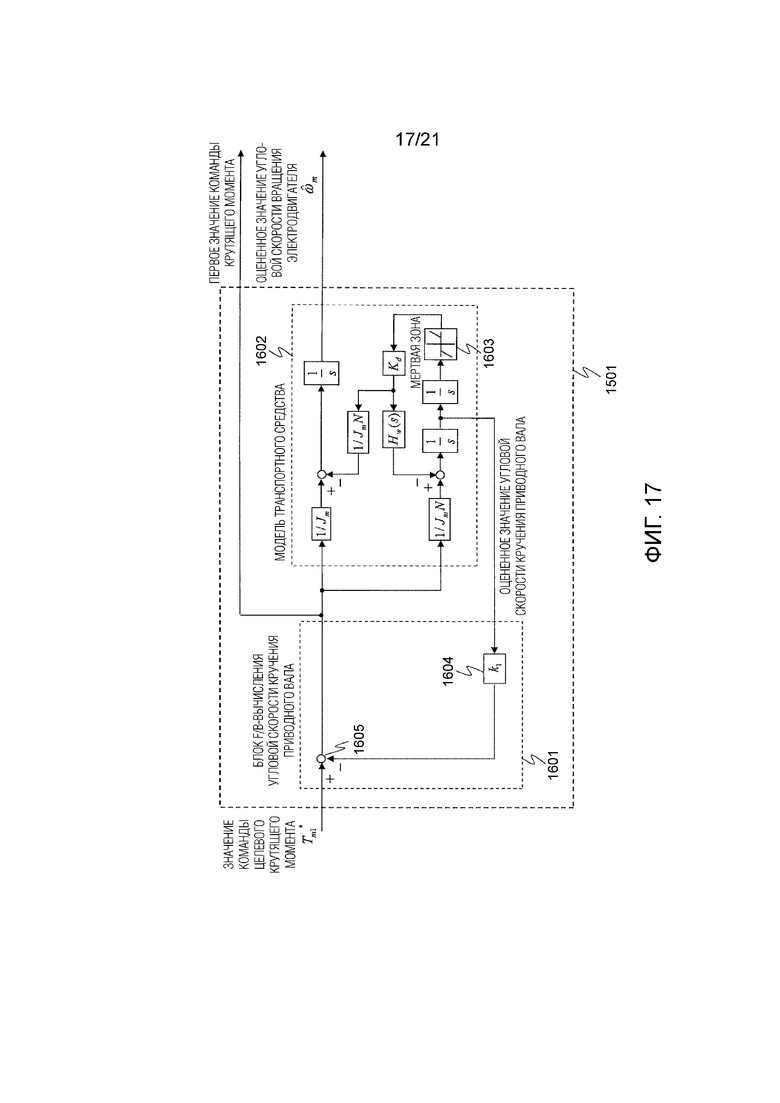
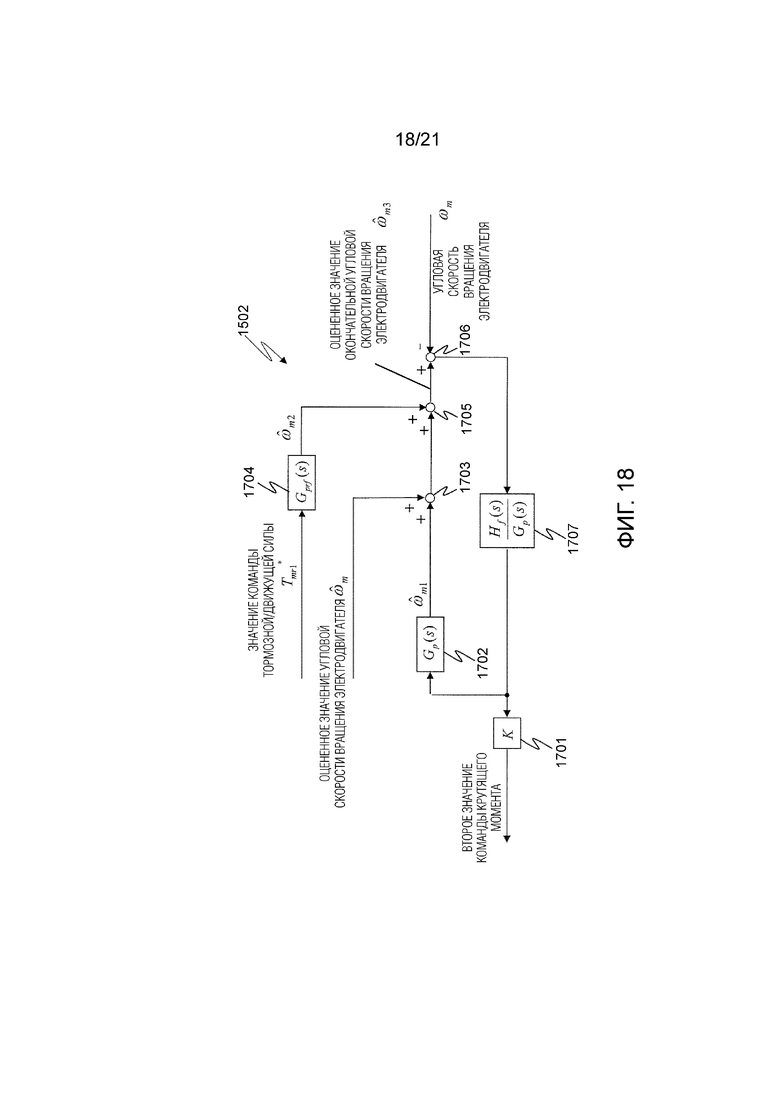
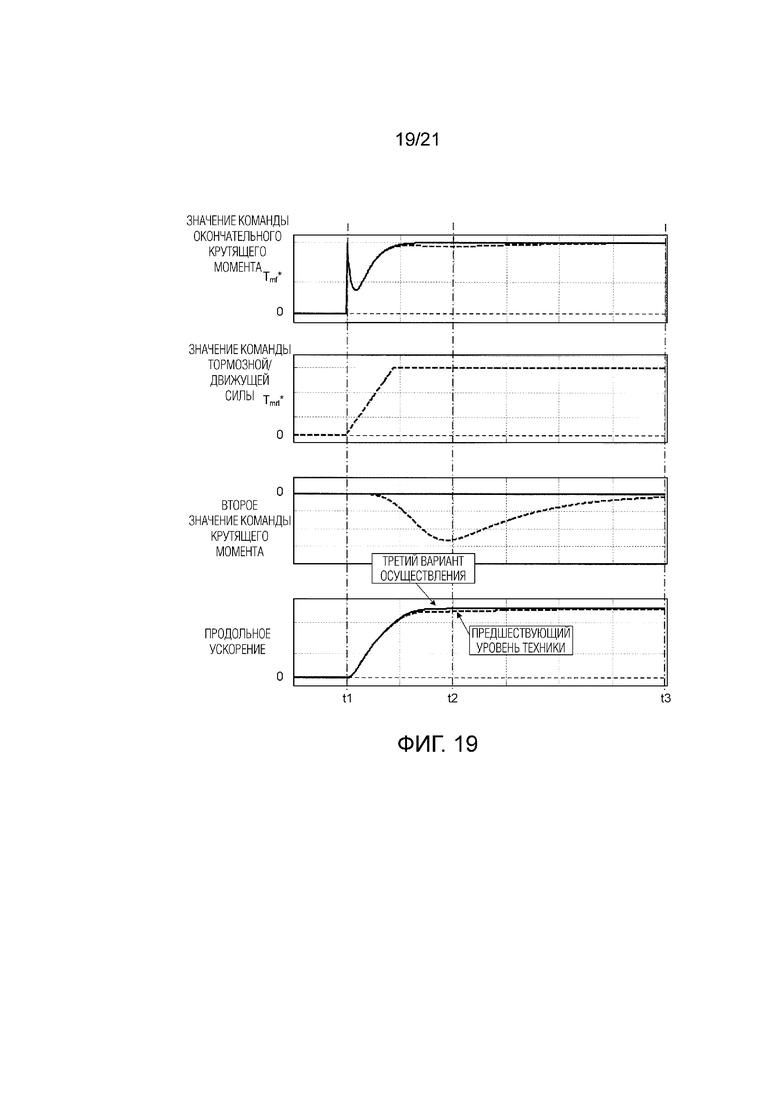
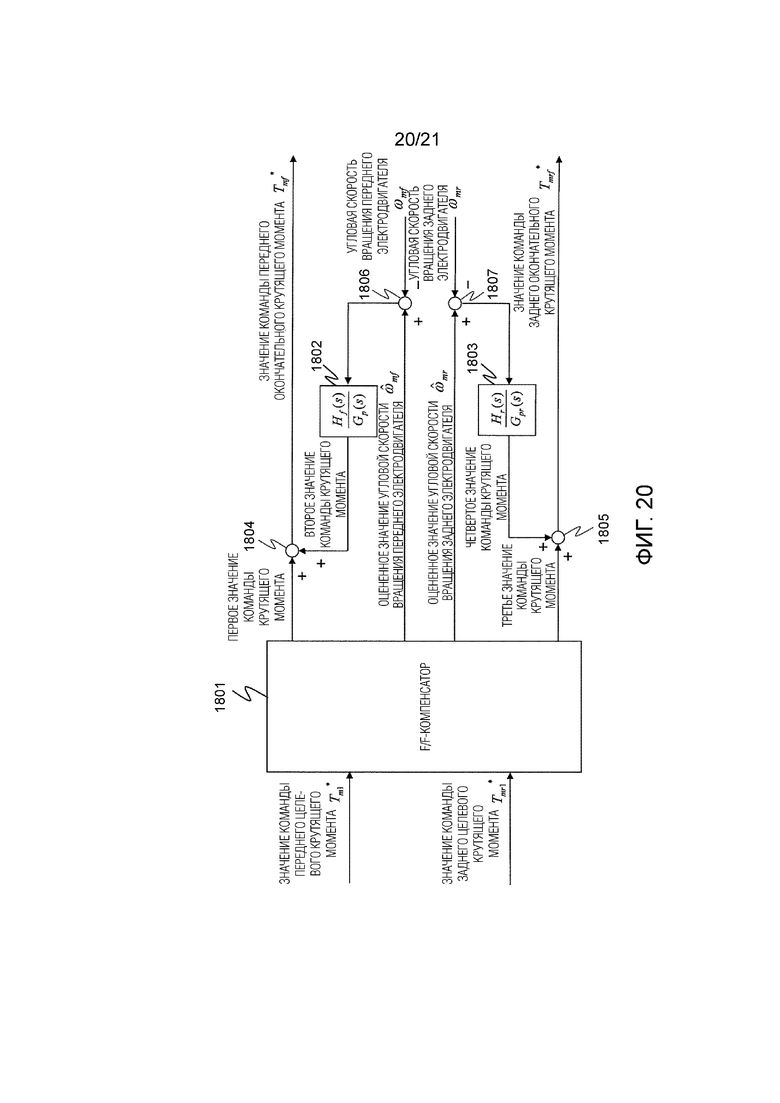
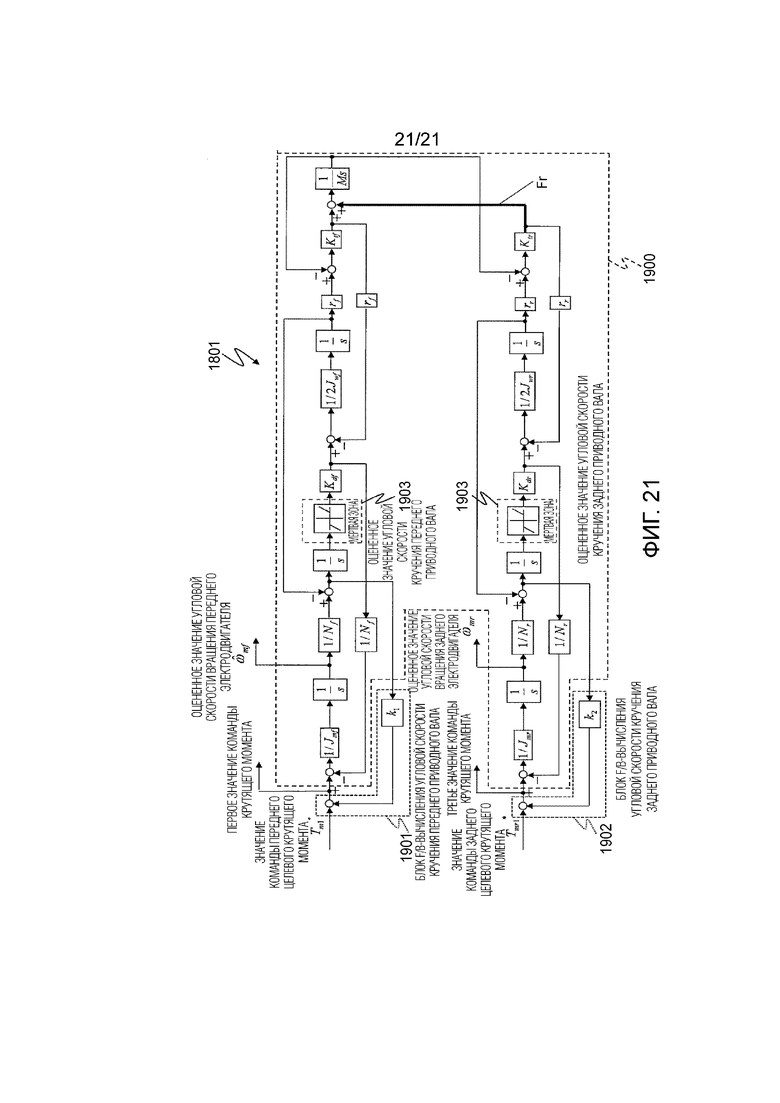
Группа изобретений относится к электрическим тяговым системам транспортных средств. Способ управления электродвигателем электрического транспортного средства заключается в следующем. Вычисляют первое значение команды крутящего момента и детектируют угловую скорость вращения первого электродвигателя. Оценивают угловую скорость вращения первого электродвигателя на основе первого значения команды крутящего момента с использованием модели Gp(s) транспортного средства. Вычисляют второе значение команды крутящего момента из отклонения между детектированным и оцененным значением угловой скорости вращения первого электродвигателя с использованием фильтра H(s)/Gp(s). Управляют крутящим моментом первого электродвигателя в соответствии с первым значением команды окончательного крутящего момента, полученным путем сложения первого и второго значений команды крутящего момента. Корректируют при вводе крутящего момента для второго ведущего колеса, отличного от первого ведущего колеса, оцененное значение угловой скорости вращения первого электродвигателя на основе крутящего момента. Также заявлено устройство управления электродвигателем транспортного средства. Технический результат заключается в возможности подавить крутильную вибрацию приводного вала передних и задних ведущих колес. 2 н. и 11 з.п. ф-лы, 21 ил.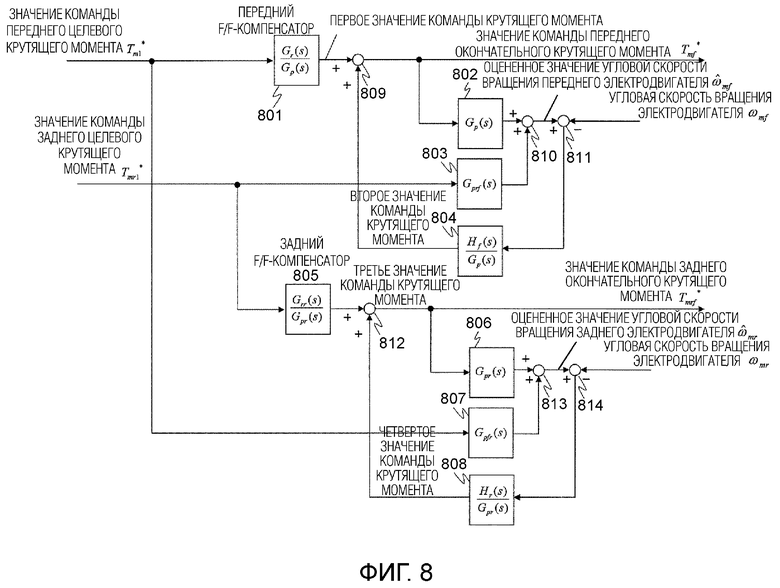
1. Способ управления электродвигателем электрического транспортного средства, причем способ управления сконфигурирован для установки значения команды крутящего момента электродвигателя на основе информации транспортного средства и для управления крутящим моментом первого электродвигателя, соединенного с первым ведущим колесом, причем первое ведущее колесо является одним из переднего ведущего колеса и заднего ведущего колеса, при этом способ управления содержит этапы, на которых:
вычисляют первое значение команды крутящего момента посредством вычисления с прямой связью на основе значения команды крутящего момента электродвигателя;
детектируют угловую скорость вращения первого электродвигателя;
оценивают угловую скорость вращения первого электродвигателя на основе первого значения команды крутящего момента с использованием модели Gp(s) транспортного средства, которая имитирует характеристику перехода от крутящего момента, вводимого на первое ведущее колесо, к угловой скорости вращения первого электродвигателя;
вычисляют второе значение команды крутящего момента из отклонения между детектированным значением и оцененным значением угловой скорости вращения первого электродвигателя с использованием фильтра H(s)/Gp(s), состоящего из обратной характеристики модели Gp(s) транспортного средства и полосового фильтра H(s) с центральной частотой, близкой к частоте крутильной вибрации транспортного средства;
управляют крутящим моментом первого электродвигателя в соответствии с первым значением команды окончательного крутящего момента, полученным путем сложения первого значения команды крутящего момента и второго значения команды крутящего момента; и
корректируют при вводе тормозного/движущего крутящего момента для второго ведущего колеса, являющегося ведущим колесом, отличным от первого ведущего колеса, оцененное значение угловой скорости вращения первого электродвигателя на основе тормозного/движущего крутящего момента.
2. Способ управления электродвигателем электрического транспортного средства по п.1, в котором:
при вводе тормозного/движущего крутящего момента для второго ведущего колеса, являющегося ведущим колесом, отличным от первого ведущего колеса, величину коррекции угловой скорости вращения электродвигателя вычисляют с использованием функции перехода угловой скорости вращения первого электродвигателя для второго ведущего колеса, причем функция перехода смоделирована заранее и использует тормозной/движущий крутящий момент в качестве входных данных; и
оцененное значение угловой скорости вращения первого электродвигателя корректируют на основе величины коррекции угловой скорости вращения электродвигателя.
3. Способ управления электродвигателем электрического транспортного средства по п.1,
в котором, когда электрическое транспортное средство включает в себя второй электродвигатель в качестве источника энергии для второго ведущего колеса, модель Gp(s) транспортного средства представляет собой модель транспортного средства с приводом на четыре колеса (4WD), которая имитирует характеристику перехода от вводов крутящего момента на первое ведущее колесо и второе ведущее колесо к угловым скоростям вращения электродвигателя для первого электродвигателя и второго электродвигателя, и
при этом способ управления содержит этапы, на которых:
вычисляют третье значение команды крутящего момента посредством вычисления с прямой связью на основе значения команды крутящего момента электродвигателя;
детектируют угловую скорость вращения второго электродвигателя;
вычисляют четвертое значение команды крутящего момента из отклонения между детектированным значением и оцененным значением угловой скорости вращения второго электродвигателя с использованием фильтра H(s)/Gpr(s), состоящего из обратной характеристики модели Gpr(s) транспортного средства, которая имитирует характеристику перехода от крутящего момента, введенного на второе ведущее колесо, к угловой скорости вращения электродвигателя для второго электродвигателя, и полосового фильтра H(s) с центральной частотой, близкой к частоте крутильной вибрации транспортного средства;
управляют крутящим моментом второго электродвигателя в соответствии со вторым значением команды окончательного крутящего момента, полученным путем сложения третьего значения команды крутящего момента и четвертого значения команды крутящего момента вместе; и
вычисляют оцененное значение угловой скорости вращения первого электродвигателя и оцененное значение угловой скорости вращения второго электродвигателя с использованием первого значения команды крутящего момента и третьего значения команды крутящего момента в качестве входных данных и с использованием модели транспортного средства 4WD, и корректируют оцененное значение угловой скорости вращения первого электродвигателя на основе третьего значения команды крутящего момента.
4. Способ управления электродвигателем электрического транспортного средства по п.1,
в котором, когда электрическое транспортное средство включает в себя второй электродвигатель в качестве источника энергии для второго ведущего колеса, модель Gp(s) транспортного средства представляет собой модель транспортного средства 4WD, которая имитирует характеристику перехода от вводов крутящего момента на первое ведущее колесо и второе ведущее колесо к угловым скоростям вращения электродвигателя для первого электродвигателя и второго электродвигателя,
при этом способ управления содержит этапы, на которых:
вычисляют третье значение команды крутящего момента посредством вычисления с прямой связью на основе значения команды крутящего момента электродвигателя;
детектируют угловую скорость вращения второго электродвигателя;
вычисляют четвертое значение команды крутящего момента из отклонения между детектированным значением и оцененным значением угловой скорости вращения второго электродвигателя; и
управляют крутящим моментом второго электродвигателя в соответствии со вторым значением команды окончательного крутящего момента, полученным путем сложения третьего значения команды крутящего момента и четвертого значения команды крутящего момента вместе, и
при этом способ управления содержит в вычислении с прямой связью этапы, на которых:
делят значение команды крутящего момента электродвигателя на первое значение команды целевого крутящего момента для первого ведущего колеса и второе значение команды целевого крутящего момента для второго ведущего колеса;
вычисляют оцененное значение угловой скорости вращения первого электродвигателя, оцененное значение угловой скорости вращения второго электродвигателя, оцененное значение угловой скорости кручения приводного вала первого ведущего колеса и оцененное значение угловой скорости кручения приводного вала второго ведущего колеса с использованием первого значения команды целевого крутящего момента и второго значения команды целевого крутящего момента в качестве входных данных и с использованием модели транспортного средства 4WD, и корректируют оцененное значение угловой скорости вращения первого электродвигателя на основе второго значения команды целевого крутящего момента;
вычисляют первое значение команды крутящего момента путем вычитания из первого значения команды целевого крутящего момента значения, полученного путем умножения оцененного значения угловой скорости кручения приводного вала первого ведущего колеса на предварительно определенный коэффициент усиления; и
вычисляют третье значение команды крутящего момента путем вычитания из второго значения команды целевого крутящего момента значения, полученного путем умножения оцененного значения угловой скорости кручения приводного вала второго ведущего колеса на предварительно определенный коэффициент усиления.
5. Способ управления электродвигателем электрического транспортного средства по п.3 или 4, в котором, когда частота крутильной вибрации приводного вала первого ведущего колеса и частота крутильной вибрации приводного вала второго ведущего колеса отличаются друг от друга, отклик модели, используемый в вычислении с прямой связью, в котором вычисляют первое значение команды крутящего момента, и отклик модели, используемый при вычислении с прямой связью, в котором вычисляют третье значение команды крутящего момента, согласуют друг с другом.
6. Способ управления электродвигателем электрического транспортного средства по п.5, в котором:
когда частота крутильной вибрации приводного вала второго ведущего колеса меньше частоты крутильной вибрации приводного вала первого ведущего колеса, отклик модели, использованный в вычислении с прямой связью, в котором вычисляют первое значение команды крутящего момента, согласуют с откликом модели, использованным в вычислении с прямой связью, в котором вычисляют третье значение команды крутящего момента; и
когда частота крутильной вибрации приводного вала первого ведущего колеса меньше частоты крутильной вибрации приводного вала второго ведущего колеса, отклик модели, используемый в вычислении с прямой связью, в котором вычисляют третье значение команды крутящего момента, согласуют с откликом модели, используемым в вычислении с прямой связью, в котором вычисляют первое значение команды крутящего момента.
7. Способ управления электродвигателем электрического транспортного средства по п.5, содержащий этапы, на которых:
вычисляют первое значение команды крутящего момента посредством вычисления с прямой связью с использованием фильтра, имеющего характеристику перехода, которая демпфирует частоту крутильной вибрации приводного вала первого ведущего колеса; и
вычисляют третье значение команды крутящего момента посредством вычисления с прямой связью с использованием фильтра, имеющего характеристику перехода, которая демпфирует частоту крутильной вибрации приводного вала второго ведущего колеса.
8. Способ управления электродвигателем электрического транспортного средства по п.2, в котором фильтр с функцией перехода угловой скорости вращения первого электродвигателя для второго ведущего колеса аппроксимируют фильтром, в котором частоту крутильной вибрации по меньшей мере одного из первого ведущего колеса и второго ведущего колеса устанавливают на частоту среза.
9. Способ управления электродвигателем электрического транспортного средства по п.2, в котором фильтр с функцией перехода угловой скорости вращения первого электродвигателя для второго ведущего колеса аппроксимируют для формирования составляющей усиления характеристики перехода угловой скорости вращения первого электродвигателя для второго ведущего колеса.
10. Способ управления электродвигателем электрического транспортного средства по п.2, в котором:
фильтр с функцией перехода угловой скорости вращения первого электродвигателя для второго ведущего колеса имеет в знаменателе коэффициент демпфирования из-за частоты крутильной вибрации; и
когда имеется характеристика, в которой коэффициент демпфирования становится меньше 1, коэффициент демпфирования устанавливают равным или больше 1.
11. Способ управления электродвигателем электрического транспортного средства по п.2, в котором в вычислении с прямой связью угловую скорость кручения приводного вала вычисляют из значения команды крутящего момента электродвигателя с использованием модели транспортного средства с мертвой зоной, имеющей мертвую зону, в которой крутящий момент первого электродвигателя не переходит в крутящий момент приводного вала, и первое значение команды крутящего момента вычисляют посредством подачи обратно вычисленной угловой скорости кручения приводного вала к значению команды крутящего момента электродвигателя.
12. Способ управления электродвигателем электрического транспортного средства по п.2, в котором модель Gp(s) транспортного средства представляет собой модель транспортного средства 4WD, которая имитирует характеристику перехода от вводов крутящих моментов на первое ведущее колесо и второе ведущее колесо к угловым скоростям вращения электродвигателя для первого электродвигателя и второго электродвигателя в качестве источника энергии для второго ведущего колеса.
13. Устройство управления электродвигателем электрического транспортного средства, причем устройство управления включает в себя контроллер, сконфигурированный для установки значения команды крутящего момента электродвигателя на основе информации транспортного средства и для управления крутящим моментом первого электродвигателя, соединенного с первым ведущим колесом, причем первое ведущее колесо является одним из переднего ведущего колеса и заднего ведущего колеса, при этом контроллер сконфигурирован для:
вычисления первого значения команды крутящего момента посредством вычисления с прямой связью на основе значения команды крутящего момента электродвигателя;
детектирования угловой скорости вращения первого электродвигателя;
оценки угловой скорости вращения первого электродвигателя на основе первого значения команды крутящего момента с использованием модели Gp(s) транспортного средства, которая имитирует характеристику перехода от крутящего момента, вводимого на первое ведущее колесо, к угловой скорости вращения первого электродвигателя;
вычисления второго значения команды крутящего момента из отклонения между детектированным значением и оцененным значением угловой скорости вращения первого электродвигателя с использованием фильтра H(s)/Gp(s), состоящего из обратной характеристики модели Gp(s) транспортного средства и полосового фильтра H(s) с центральной частотой, близкой к частоте крутильной вибрации транспортного средства;
управления крутящим моментом первого электродвигателя в соответствии с первым значением команды окончательного крутящего момента, полученным путем сложения первого значения команды крутящего момента и второго значения команды крутящего момента; и
коррекции при вводе тормозного/движущего крутящего момента для второго ведущего колеса, являющегося ведущим колесом, отличным от первого ведущего колеса, оцененного значения угловой скорости вращения первого электродвигателя на основе тормозного/движущего крутящего момента.
| JP 2017085850 A, 18.05.2017 | |||
| JP 2003009566 A, 10.01.2003 | |||
| WO 2013157315 A1, 24.10.2013 | |||
| JP 2011097794 A, 12.05.2011 | |||
| СПОСОБ УПРАВЛЕНИЯ МНОГОПРИВОДНОЙ ЭЛЕКТРИЧЕСКОЙ ТРАНСМИССИЕЙ МНОГООСНОЙ КОЛЕСНОЙ МАШИНЫ | 2009 |
|
RU2426660C2 |

