Изобретение относится к рельсовому транспорту и может быть использовано на подвижном составе с асинхронными тяговыми двигателями (АТД), подключенными параллельно к одному автономному инвертору напряжения (АИН). На локомотивах такое параллельное подключение к одному инвертору и совместное управление (регулирование) АТД осуществляется обычно в пределах каждой тележки, поэтому его часто называют «потележечным» регулированием АТД.
Известен способ управления двумя АТД при питании от одного инвертора (Известия вузов. Электромеханика, №2, 2006, С.45-51 - прототип [1]) с использованием векторного управления АТД при постоянстве потокосцепления ротора. В данном способе параметры состояния двигателей определяются с использованием датчиков фазных токов и частоты вращения каждого АТД, затем по информации о частоте вращения двигателей принимается решение, по какому двигателю вести управление, и в качестве сигналов обратной связи системой управления (СУ) используется информация о токе статора, потокосцеплении и частоте вращения ротора этого двигателя.
Недостатком этого способа является наличие большого числа датчиков тока и переключение всех обратных связей в зависимости от того, по какому двигателю ведется управление, что может приводить к значительным электромеханическим колебаниям и повышенным динамическим нагрузкам в элементах тяговой передачи. Недостатком является также управление в режиме тяги по двигателю с меньшей скоростью вращения, так как при этом не отрабатывается необходимое снижение момента двигателя с большей скоростью вращения при резком изменении условий сцепления (например, наезд на масляное пятно). Кроме того, к недостаткам этого способа можно отнести само векторное управление АТД, требующее прямых и обратных координатных преобразований и компенсации перекрестных обратных связей объекта, увеличивающих ошибку и уменьшающих надежность системы.
Известна также система прямого управления моментом (Direct Torque Control, - сокращенно DTC) (Козярук А.Е., Рудаков В.В. Системы прямого управления моментом в частотно-регулируемых электроприводах переменного тока / под ред. Народицкого А.Г. - СПб.: Санкт-Петербургская электротехническая компания, 2005. - 100 с. [2]), которую можно использовать для управления АТД (Электроника и электрооборудование транспорта. - 2008. - №5. - С.12-19 [3]).
Недостатком способов управления с использованием системы DTC, представленных в [2] и аналогичных [3, 4], является то, что они рассчитаны на индивидуальное регулирование двигателей (в частности, индивидуальное регулирование АТД каждой оси локомотива) и не предусматривают возможности совместного регулирования нескольких АТД, подключенных параллельно к одному АИН.
Целью изобретения является управление асинхронными тяговыми двигателями, подключенными параллельно к одному инвертору, обеспечивающее высокодинамичное регулирование момента двигателей и предупреждение боксования и юза.
Технический результат достигается тем (фиг.1), что в данном способе, использующем прямое управление моментом, вычисление текущих значений электромагнитного момента и потокосцепления статора ведется в блоке DTC всегда только по первому двигателю (двигателю первой оси тележки при потележечном регулировании) в соответствии с выражениями:



где  и
и  потокосцепления первого двигателя по оси α и β соответственно;
потокосцепления первого двигателя по оси α и β соответственно;
 и
и  - напряжения статора параллельно включенных двигателей по оси α и β соответственно;
- напряжения статора параллельно включенных двигателей по оси α и β соответственно;
 и
и  - токи статора первого двигателя по оси α и β соответственно;
- токи статора первого двигателя по оси α и β соответственно;
RS1 - сопротивление фазы обмотки статора первого двигателя, корректируемое с учетом изменения температуры обмотки;
М - электромагнитный момент первого двигателя;
р - число пар полюсов;
 - модуль вектора потокосцепления статора первого двигателя;
- модуль вектора потокосцепления статора первого двигателя;
θs - фаза вектора потокосцепления статора первого двигателя,
а вычисление задания на момент, подаваемого в блок DTC, ведется регулятором скорости с использованием сигналов максимальной или минимальной частоты (угловой скорости) вращения параллельно включенных асинхронных двигателей: в режиме тяги управление ведется по максимальной, а в режиме торможения - по минимальной скорости вращения, например, при использовании пропорционально-интегрального регулятора скорости (возможны и другие типы регуляторов), задание на момент Мз, поступающее в блок DTC, вычисляется по формулам:
 - в режиме тяги
- в режиме тяги
 - в режиме торможения
- в режиме торможения
и ограничивается на величине Могр в случае ее превышения,
где kω - коэффициент усиления пропорционального звена регулятора скорости;
Tω - постоянная времени интегрального звена регулятора скорости;
ωз - задание угловой скорости, поступающее из системы управления верхнего уровня и определяемое с учетом обеспечения оптимального проскальзывания колес;
ωmax - максимальная скорость вращения параллельно включенных двигателей;
ωmin - минимальная скорость вращения параллельно включенных двигателей;
Могр - ограничение по моменту, вырабатываемое в системе управления верхнего уровня;
причем задание на потокосцепление статора  подаваемое в блок DTC, определяется в системе управления верхнего уровня по заданной зависимости
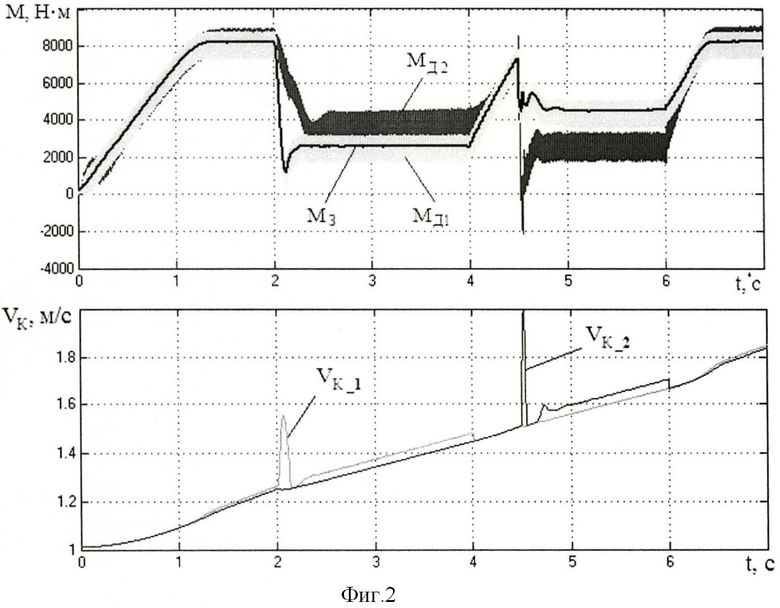
подаваемое в блок DTC, определяется в системе управления верхнего уровня по заданной зависимости  где ωcp - средняя скорость вращения двигателей или скорость локомотива, приведенная к валу двигателя. На фиг.1 показана система управления тяговым электроприводом с использованием предлагаемого способа, на фиг.2 в качестве примера приведены результаты моделирования поочередного наезда колес 1-й и 2-й оси тележки на масляное пятно длиной 2,5 м в процессе разгона локомотива.
где ωcp - средняя скорость вращения двигателей или скорость локомотива, приведенная к валу двигателя. На фиг.1 показана система управления тяговым электроприводом с использованием предлагаемого способа, на фиг.2 в качестве примера приведены результаты моделирования поочередного наезда колес 1-й и 2-й оси тележки на масляное пятно длиной 2,5 м в процессе разгона локомотива.
К отличительным особенностям DTC можно отнести наличие в системе (фиг.1):
- гистерезисных релейных регуляторов потокосцепления статора (РРп) и момента (РРм) асинхронного двигателя;
- электронной адаптивной модели двигателя (АМД) для вычисления текущих управляемых координат асинхронного двигателя (потокосцепления статора и электромагнитного момента) по значению фазных токов, напряжения в звене постоянного тока и коммутационной функции АИН;
- блока вычисления фазового сектора (БВФС), в котором в текущий момент времени находится вектор потокосцепления статора двигателя;
- табличного (матричного) вычислителя оптимального вектора напряжения двигателя, выполняемого в виде блока логического автомата (БЛА) и определяющего функцию переключения вентилей АИН.
Система DTC обладает высоким быстродействием и в то же время в ней не требуются необходимые при реализации векторного управления преобразователи координат, регуляторы составляющих тока статора, блоки компенсации перекрестных обратных связей АТД. Кроме того, система более устойчива к возмущениям и неточности информации о переменных состояния объекта управления, чем обычная векторная система, что очень важно в тяговом электроприводе. Использование для вычисления фактических значений потокосцепления и момента только датчиков первого двигателя АТД_1, а не двигателя с минимальной или максимальной скоростью вращения, по которой в данный момент ведется управление, позволяет избежать электромеханических колебаний, возникающих при переключении обратных связей из-за разброса параметров обмоток двигателей. При этом двигатель АТД_1 первой оси, имеющей наименьшую вертикальную нагрузку, наиболее склонен к боксованию и юзу, поэтому он наиболее часто имеет максимальную и минимальную скорость в режимах тяги и торможения соответственно, и именно его скорость используется для управления. Переключения на управление по скорости других двигателей, например двигателя второй оси АТД_2, происходят, например, при поочередном проезде осями масляного пятна (фиг.2), когда вторая ось наезжает на пятно, а первая уже выехала на чистые рельсы, в этом случае боксование и юз соответствующих осей также эффективно подавляются.
Чтобы проанализировать предложенный способ, выполнено компьютерное моделирование тягового электропривода двухосной тележки с опорно-осевым подвешиванием асинхронных тяговых двигателей ДАТ305, подключенных параллельно к одному АИН, разброс параметров обмоток параллельно включенных двигателей (второго двигателя по отношению к первому) варьировался в диапазоне ±(10…20%). В модель механической части подставлены параметры механической передачи тепловоза ТЭМ21. На приведенных графиках фиг.2 Мд1 и Мд2 - электромагнитные моменты двигателей первой и второй оси тележки соответственно, Мз - задание на электромагнитный момент; VK_1 и VK_2 - скорости колес первой и второй оси тележки соответственно.
Моделирование наглядно показывает эффективность подавления боксования колес и высокие динамические свойства электропривода, использующего описанный способ управления. Предлагаемый способ управления асинхронными тяговыми двигателями, подключенными параллельно к одному инвертору, обеспечивает высокодинамичное управление моментом двигателей и предупреждение боксования и юза при разбросе параметров обмоток параллельно включенных двигателей до 20% по отношению к первому двигателю.
Источники информации, принятые во внимание при экспертизе
1. Колпахчьян П.Г. Управление двумя асинхронными тяговыми двигателями при питании от одного инвертора // Изв. вузов. Электромеханика. - 2006, - №2. - С.45-51.
2. Козярук А.Е., Рудаков В.В. Системы прямого управления моментом в частотно-регулируемых электроприводах переменного тока / под ред. Народицкого А.Г. - СПб.: Санкт-Петербургская электротехническая компания, 2005. - 100 с.
3. Бабков Ю.В., Чудаков П.Л., Романов И.В., Федяева Г.А. Совершенствование систем и алгоритмов управления тяговым электроприводом тепловозов с асинхронными двигателями // Электроника и электрооборудование транспорта. - 2008. - №5. - С.12-19.
4. Иньков Ю.М., Феоктистов В.П., Федяева Г.А. Система экстремального регулирования тягового электропривода с асинхронными двигателями // Электроника и электрооборудование транспорта. - 2008. - №4. - С.10-18.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЭНЕРГОЭФФЕКТИВНЫЙ СПОСОБ УПРАВЛЕНИЯ АСИНХРОННЫМИ ТЯГОВЫМИ ДВИГАТЕЛЯМИ, ПОДКЛЮЧЕННЫМИ ПАРАЛЛЕЛЬНО К ОДНОМУ ИНВЕРТОРУ | 2014 |
|
RU2586944C2 |
| СПОСОБ УПРАВЛЕНИЯ ТЯГОВЫМ ЭЛЕКТРОПРИВОДОМ ЛОКОМОТИВА НА ПРЕДЕЛЕ ПО СЦЕПЛЕНИЮ КОЛЕС С РЕЛЬСАМИ | 2010 |
|
RU2446063C2 |
| СПОСОБ ЭНЕРГОЭФФЕКТИВНОГО ДВУХЗОННОГО РЕГУЛИРОВАНИЯ СКОРОСТИ АСИНХРОННОГО ЭЛЕКТРОПРИВОДА С ГИБКИМ ОГРАНИЧЕНИЕМ МОЩНОСТИ | 2015 |
|
RU2605458C1 |
| СПОСОБ ЭНЕРГОЭФФЕКТИВНОГО ДВУХЗОННОГО РЕГУЛИРОВАНИЯ СКОРОСТИ АСИНХРОННОГО ДВИГАТЕЛЯ В СИСТЕМЕ ПРЯМОГО УПРАВЛЕНИЯ МОМЕНТОМ | 2015 |
|
RU2587162C1 |
| Способ защиты от боксования колесных пар электроподвижного состава с асинхронными тяговыми двигателями | 2022 |
|
RU2811618C1 |
| СПОСОБ АВТОМАТИЗИРОВАННОГО УПРАВЛЕНИЯ АСИНХРОННЫМ ЭЛЕКТРОПРИВОДОМ ПЕРЕДВИЖЕНИЯ С КОРРЕКЦИЕЙ ПОПЕРЕЧНОГО СМЕЩЕНИЯ | 2015 |
|
RU2605233C1 |
| Способ защиты от боксования колесных пар электроподвижного состава с асинхронными тяговыми двигателями | 2023 |
|
RU2821345C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ АСИНХРОННЫМ ДВИГАТЕЛЕМ | 2012 |
|
RU2483421C1 |
| Способ защиты от боксования колесных пар электроподвижного состава с асинхронными тяговыми двигателями | 2019 |
|
RU2720864C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ АСИНХРОННЫМ ДВИГАТЕЛЕМ | 2012 |
|
RU2483422C1 |
Изобретение относится к рельсовому транспорту и может быть использовано на подвижном составе с асинхронными тяговыми двигателями. Способ включает вычисление текущих значений электромагнитного момента и потокосцепления статора в блоке DTC (Direct Torque Control) по первому двигателю. Вычисление задания на момент ведется регулятором скорости с использованием сигналов максимальной или минимальной частоты вращения параллельно включенных асинхронных двигателей. В режиме тяги управление ведется по максимальной скорости вращения. В режиме торможения управление ведется по минимальной скорости вращения. Задание на потокосцепление статора ψsз определяется в системе управления верхнего уровня по зависимости ψsз=f(ωср), где ωср - средняя скорость вращения двигателей или скорость локомотива, приведенная к валу двигателя. Технический результат заключается в обеспечении высокодинамичного управления моментом двигателей и предупреждении боксования и юза. 2 ил.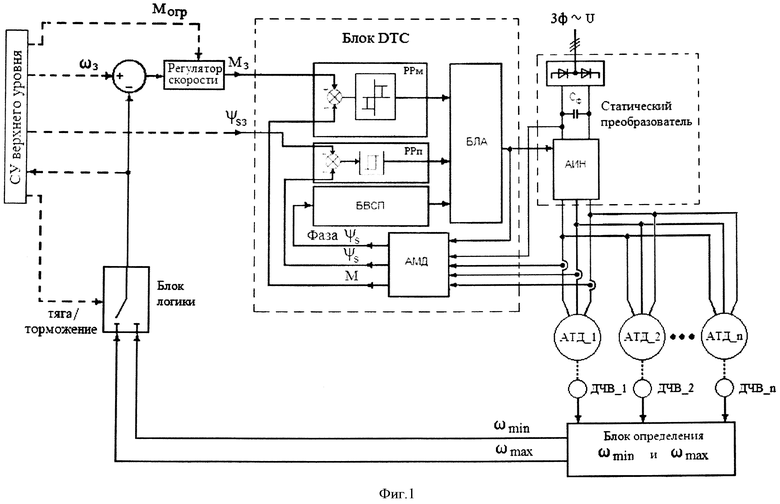
Способ управления асинхронными тяговыми двигателями, подключенными параллельно к одному инвертору, использующий прямое управление моментом (Direct Torque Control - сокращенно DTC), отличающийся тем, что в данном способе вычисление текущих значений электромагнитного момента и потокосцепления статора ведется в блоке DTC всегда только по первому двигателю (двигателю первой оси тележки при потележечном регулировании) в соответствии с выражениями:


где  и
и  - потокосцепления первого двигателя по оси α и β соответственно;
- потокосцепления первого двигателя по оси α и β соответственно;
 и
и  - напряжения статора параллельно включенных двигателей по оси α и β соответственно;
- напряжения статора параллельно включенных двигателей по оси α и β соответственно;
 и
и  - токи статора первого двигателя по оси α и β соответственно;
- токи статора первого двигателя по оси α и β соответственно;
RS1 - сопротивление фазы обмотки статора первого двигателя, корректируемое с учетом изменения температуры обмотки;
М - электромагнитный момент первого двигателя;
p - число пар полюсов;
 - модуль вектора потокосцепления статора первого двигателя;
- модуль вектора потокосцепления статора первого двигателя;
θs - фаза вектора потокосцепления статора первого двигателя;
а вычисление задания на момент, подаваемого в блок DTC, ведется регулятором скорости с использованием сигналов максимальной или минимальной частоты (угловой скорости) вращения параллельно включенных асинхронных двигателей, а в режиме тяги управление ведется по максимальной, в режиме торможения - по минимальной скорости вращения, при использовании пропорционально-интегрального регулятора скорости задание на момент Мз, поступающее в блок DTC, вычисляется по формулам:
 - в режиме тяги
- в режиме тяги
 - в режиме торможения
- в режиме торможения
и ограничивается на величине Могр, в случае ее превышения,
где kω - коэффициент усиления пропорционального звена регулятора скорости;
Тϖ - постоянная времени интегрального звена регулятора скорости;
ωз - задание угловой скорости, поступающее из системы управления верхнего уровня и определяемое с учетом обеспечения оптимального проскальзывания колес;
ωmax - максимальная скорость вращения параллельно включенных двигателей;
ωmin - минимальная скорость вращения параллельно включенных двигателей;
Могр - ограничение по моменту, вырабатываемое в системе управления верхнего уровня;
причем задание на потокосцепление статора ψsз, подаваемое в блок DTC, определяется в системе управления верхнего уровня по заданной зависимости ψsз=f(ωcp), где ωср - средняя скорость вращения двигателей или скорость локомотива, приведенная к валу двигателя.
| СПОСОБ УПРАВЛЕНИЯ ЭЛЕКТРОПРИВОДОМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1991 |
|
RU2020724C1 |
| Электропривод | 1987 |
|
SU1436263A1 |
| JP 9201099 A, 31.07.1997 | |||
| УСТРОЙСТВО ДЛЯ ПОСЫПАНИЯ ПОЛОК ЛЮЛЕК ПОДВЕСНОГО КОНВЕЙЕРА | 1949 |
|
SU85394A1 |

