Изобретение относится к пассивным бортовым системам наблюдения за движущимися объектами на поверхности. Такие системы принимают сигналы излучения в различных диапазонах частот: радиолокационном (радиолокационные станции - РЛС и тепловые РЛС - РТЛС), инфракрасном (сканеры), оптическом (матричные видеодатчики и видеокамеры).
При слежении за движущимися объектами на поверхности с помощью бортовых РТЛС или видеодатчиков возникает задача измерения пространственных перемещений контролируемого объекта на поверхности и дальности до него. Решение этой задачи актуально в связи с созданием пассивных систем сопровождения объектов с построением траекторий их движения.
Известен интерферометрический способ измерения угловой скорости одиночного воздушного объекта с помощью РТЛС [1, с.163-164], который может быть использован также для измерения перемещений объекта при выполнении следующих условий:
- известна дальность до объекта;
- наблюдается одиночный воздушный объект;
- на промежутке времени наблюдения дальность до объекта не меняется;
- объект проходит лепесток интерферометрической диаграммы направленности в известной плоскости.
Следовательно, для измерения перемещений объекта на поверхности в произвольном направлении при заранее не известной дальности такой способ не применим.
Наиболее близким по технической сущности является способ наблюдения за поверхностью и объектами на поверхности [2] на базе бортовой РЛС, применимый также для бортовых РТЛС, который основан на формировании матрицы A(i, j) двумерного амплитудного изображения поверхности в зоне обзора в i, j-x элементах дискретизации угла места и азимута в известном сечении (диапазоне) дальности с повышенным разрешением по угловым координатам. Способ позволяет в последовательности моментов времени наблюдения t1, …, tµ формировать последовательность матриц A1(i, j), …, Aµ(i, j) изображения поверхности, в составе которых находится изображение объекта, подлежащего сопровождению. Однако применительно к пассивным системах наблюдения (тепловым и оптическим) такой способ обладает недостатком - он не позволяет измерить дальность до движущегося объекта на поверхности в этих системах и соответственно не дает возможность измерить пространственные перемещения объектов, что значительно затрудняет решение задачи сопровождения объектов.
Технический результат направлен на измерение пространственных перемещений объекта на поверхности и дальности до объекта.
Технический результат предлагаемого технического решения достигается тем, что способ измерения перемещений и дальности до движущегося объекта на поверхности бортовой пассивной системой наблюдения заключается в формировании в последовательности моментов времени наблюдения t1, …, tµ матриц A1(i, j), …, Aµ(i, j) двумерного амплитудного изображения поверхности в i, j-x элементах дискретизации угла места и азимута, (где i, j - номер элемента матрицы, µ - число наблюдений), отличающийся тем, что в каждый момент наблюдения tk(k=1, 2, …, µ) выделяют в матрице Ak(i, j) изображение объекта, определяют угловые координаты точки его центра Сk: угол места θk и азимут φk и находят единичный вектор

указывающий направление из точки Оk центра системы наблюдателя в точку Мk положения объекта на поверхности в момент tk, затем с помощью навигационной системы измеряют высоту наблюдателя hk над уровнем поверхности и определяют единичный вектор нормали к поверхности  , делят высоту на модуль скалярного произведения векторов
, делят высоту на модуль скалярного произведения векторов  и
и  тем самым вычисляют дальность Rk до объекта в момент tk:
тем самым вычисляют дальность Rk до объекта в момент tk:
далее, начиная с момента t2, определяют вектор  перемещения наблюдателя на промежутке [tk-1, tk], пересчитывают координаты вектора
перемещения наблюдателя на промежутке [tk-1, tk], пересчитывают координаты вектора  на момент tk с использованием данных навигационной системы о повороте осей и параллельном переносе системы координат наблюдателя и находят по правилу сложения векторов вектор
на момент tk с использованием данных навигационной системы о повороте осей и параллельном переносе системы координат наблюдателя и находят по правилу сложения векторов вектор

перемещения наблюдаемого объекта на промежутке [tk-1, tk], затем, если длина найденного вектора перемещения  превышает заданную величину, дальность до объекта Rk вычисляют вторым способом из условия перпендикулярности векторов
превышает заданную величину, дальность до объекта Rk вычисляют вторым способом из условия перпендикулярности векторов  и
и  по формуле
по формуле

а если меньше заданной величины (близка к нулю), то дальность Rk вычисляют по теореме синусов для треугольника МkОk-1Оk, построенного на векторах  ,
,  ,
,  , по формуле
, по формуле
где 
 при этом найденные дальности усредняют и в конечный момент времени tµ последовательно для k=1, 2, …, µ восстанавливают все точки М1, М2, …, Мµ перемещения объекта на поверхности в системе координат наблюдателя на момент времени tµ и строят по найденным точкам пространственную траекторию движения объекта, необходимую для его дальнейшего сопровождения.
при этом найденные дальности усредняют и в конечный момент времени tµ последовательно для k=1, 2, …, µ восстанавливают все точки М1, М2, …, Мµ перемещения объекта на поверхности в системе координат наблюдателя на момент времени tµ и строят по найденным точкам пространственную траекторию движения объекта, необходимую для его дальнейшего сопровождения.
Алгоритмически способ осуществляется следующим образом.
1. Последовательно в дискретные моменты времени наблюдения t1, …, tµ формируются матрицы амплитудного изображения поверхности A1(i, j), …, Aµ(i, j) в i, j-x элементах дискретизации угла места и азимута с повышенным разрешением по угловым координатам.
2. В каждый момент времени наблюдения tk (k=1, 2, …, µ) выполняются следующие операции.
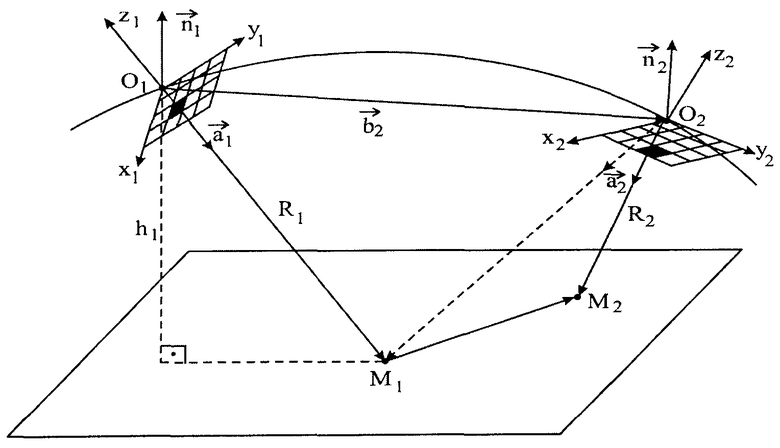
2.1. В текущей матрице Ak(i, j) выделяется изображение объекта и определяются угловые координаты точки его центра Сk: азимут φk и угол места θk, отсчитываемые соответственно на осях Okxk и Okyk прямоугольной системы координат наблюдателя
Okxkykzk. Причем линия визирования пассивной системы в момент tk направлена по оси Okzk, угол места θk отсчитывается от плоскости Okxkzk, а азимут φk - от оси Okzk в плоскости Okxkzk.
2.2. На основе угловых координат θk, φk центра Ck изображения объекта находится единичный вектор  в системе координат наблюдателя, указывающий направление из точки Ok центра этой системы в точку Мk положения объекта на поверхности в момент tk по формуле
в системе координат наблюдателя, указывающий направление из точки Ok центра этой системы в точку Мk положения объекта на поверхности в момент tk по формуле

2.3. С помощью навигационной системы измеряется высота наблюдателя hk над уровнем поверхности и определяется единичный вектор нормали к поверхности  .
.
2.4. Из прямоугольного треугольника  , где
, где  - проекция точки Ok на поверхность и
- проекция точки Ok на поверхность и  , находится дальность Rk=OkMk до объекта в момент tk с помощью модуля скалярного произведения векторов
, находится дальность Rk=OkMk до объекта в момент tk с помощью модуля скалярного произведения векторов  и
и  (косинуса угла между этими векторами) по формуле
(косинуса угла между этими векторами) по формуле
3. Для моментов времени наблюдения tk (k=2, 3, …, µ), начиная с t2, выполняются следующие операции.
3.1. На основе данных навигационной системы об углах поворота осей α, β, γ и приращениях параллельного переноса Δx, Δу, Δz в системе Ok, xk, yk, zk составляется вектор 
 перемещения наблюдателя на промежутке
перемещения наблюдателя на промежутке  и пересчитываются координаты вектора
и пересчитываются координаты вектора  найденного по формуле (1) в момент tk-1, в систему Ok, xk, yk, zk на момент времени tk по формуле (3). Получается вектор
найденного по формуле (1) в момент tk-1, в систему Ok, xk, yk, zk на момент времени tk по формуле (3). Получается вектор  который далее обозначается
который далее обозначается 

3.2. Находится вектор  перемещения наблюдаемого объекта на промежутке
перемещения наблюдаемого объекта на промежутке
[tk-1, tk] по правилу сложения векторов

Признаком перемещения объекта на поверхности на промежутке времени [tk-1, tk] является ненулевая длина вектора  или с учетом ошибок измерения - длина вектора, превышающая некоторое пороговое значение.
или с учетом ошибок измерения - длина вектора, превышающая некоторое пороговое значение.
3.3. Если длина найденного вектора перемещения превышает заданную величину, то дальность до объекта Rk вычисляется вторым способом из условия перпендикулярности векторов  и
и  (равенства нулю их скалярного произведения) по формуле
(равенства нулю их скалярного произведения) по формуле

Из (5) следует, что чем больше вектор перемещения наблюдателя  , имеющий аддитивную погрешность, тем меньше влияние мультипликативных ошибок измерения Rk-1 на точность измерения Rk.
, имеющий аддитивную погрешность, тем меньше влияние мультипликативных ошибок измерения Rk-1 на точность измерения Rk.
3.4. Если длина  меньше заданной величины (близка к нулю), то дальность
меньше заданной величины (близка к нулю), то дальность
Rk вычисляется вторым способом по теореме синусов для треугольника МkOk-1Ok с внутренними углами α, β, γ (γ=π-α-β), построенного на векторах  ,
,  ,
, 
Из (6) следует, что с уменьшением угла α между векторами  и
и  возрастают ошибки измерения Rk. Следовательно, как и в (5), наблюдение в (6) целесообразно проводить при больших перемещениях
возрастают ошибки измерения Rk. Следовательно, как и в (5), наблюдение в (6) целесообразно проводить при больших перемещениях  носителя пассивной системы.
носителя пассивной системы.
3.5. Найденные дальности (2), (5) и (2), (6) для уменьшения влияния ошибок навигационной системы усредняются.
4. В конечный момент времени tµ на основе известных координат начальной точки М1, радиусом-вектором которой на момент t1 был вектор  и на основе запомненных преобразований координат последовательно для k=1, 2, …, µ восстанавливаются все точки M1, M2, …, Mµ перемещения объекта на поверхности в системе координат наблюдателя Оµxµyµzµ, на момент времени tµ.
и на основе запомненных преобразований координат последовательно для k=1, 2, …, µ восстанавливаются все точки M1, M2, …, Mµ перемещения объекта на поверхности в системе координат наблюдателя Оµxµyµzµ, на момент времени tµ.
5. По найденным точкам М1, М2, …, Мµ строится траектория движения объекта, необходимая для его дальнейшего автосопровождения и экстраполяции координат на моменты времени tk>tµ.
На чертеже показаны векторы перемещения наблюдателя  и объекта на поверхности
и объекта на поверхности  а также векторы
а также векторы 
 направленные в точки М1, М2 его положения на поверхности в моменты времени t1, t2.
направленные в точки М1, М2 его положения на поверхности в моменты времени t1, t2.
Предложенный способ позволяет измерять пространственные перемещения объекта на поверхности с измерением дальности до него. Это дает возможность на базе пассивных радиолокационных, тепловых и оптических систем слежения за объектами строить пространственную траекторию движения объекта наблюдения, необходимую для его дальнейшего автосопровождения.
Список литературы
1. Николаев А.Г., Перцов С.В. Радиотеплолокация. М.: Сов. радио, 1964. 335 с.
2. Патент RU 2292060 С1. Способ наблюдения за воздушными объектами и поверхностью на базе бортовой РЛС. / В.К.Клочко. МПК: G01S 13/02. Приоритет 28.06.2005. Опубл. 20.01.2007. Бюл. №2.
Изобретение относится к пассивным бортовым системам наблюдения за движущимися объектами на поверхности. Указанные системы принимают сигналы излучения в различных диапазонах частот: радиолокационном (радиолокационные станции - РЛС и тепловые РЛС - РТЛС), инфракрасном (сканеры), оптическом (матричные видеодатчики и видеокамеры). Достигаемый технический результат заключается в измерении пространственных перемещений объекта на поверхности и дальности до объекта. Заявленный способ заключается в формировании в последовательности моментов времени наблюдения матриц двумерного амплитудного изображения поверхности в элементах дискретизации угла места и азимута, при этом в каждый момент наблюдения выделяют в матрице изображение объекта и находят вектор, указывающий направление на объект, затем измеряют с помощью навигационной системы положение и перемещение наблюдателя и определяют дальность до объекта, а в конечный момент времени наблюдения на основе запомненных преобразований координат восстанавливают все точки перемещения объекта на поверхности, дающие траекторию его движения, необходимую для дальнейшего автосопровождения. 1 ил.
Способ измерения бортовой пассивной системой наблюдения перемещений движущегося объекта и дальности до него, заключающийся в формировании в последовательности моментов времени наблюдения t1, …, tµ матриц A1(i,j), …, Aµ(i,j) двумерного амплитудного изображения поверхности в i,j-x элементах дискретизации угла места и азимута, (где i,j - номер элемента матрицы, µ - число наблюдений), отличающийся тем, что в каждый момент наблюдения tk(k=1, 2, …, µ) выделяют в матрице Ak(i,j) изображение объекта, определяют угловые координаты точки его центра Ck: угол места θk и азимут φk и находят единичный вектор  , указывающий направление из точки
, указывающий направление из точки
Ok центра системы наблюдателя в точку Mk положения объекта на поверхности в момент tk, затем с помощью навигационной системы измеряют высоту наблюдателя hk над уровнем поверхности и определяют единичный вектор нормали к поверхности  , делят высоту на модуль скалярного произведения векторов
, делят высоту на модуль скалярного произведения векторов  и
и  , тем самым вычисляют дальность Rk до объекта в момент tk:
, тем самым вычисляют дальность Rk до объекта в момент tk:  далее, начиная с момента t2, определяют вектор
далее, начиная с момента t2, определяют вектор  перемещения наблюдателя на промежутке [tk-1,tk], пересчитывают координаты вектора
перемещения наблюдателя на промежутке [tk-1,tk], пересчитывают координаты вектора  на момент tk с использованием данных навигационной системы о повороте осей и параллельном переносе системы координат наблюдателя и находят по правилу сложения векторов вектор
на момент tk с использованием данных навигационной системы о повороте осей и параллельном переносе системы координат наблюдателя и находят по правилу сложения векторов вектор  перемещения наблюдаемого объекта на промежутке [tk-1, tk], затем, если длина найденного вектора перемещения
перемещения наблюдаемого объекта на промежутке [tk-1, tk], затем, если длина найденного вектора перемещения  превышает заданную величину, дальность до объекта Rk вычисляют из условия перпендикулярности векторов
превышает заданную величину, дальность до объекта Rk вычисляют из условия перпендикулярности векторов  и
и  по формуле
по формуле  , а если меньше заданной величины (близка к нулю), то дальность Rk вычисляют по теореме синусов для треугольника
, а если меньше заданной величины (близка к нулю), то дальность Rk вычисляют по теореме синусов для треугольника
MkOk-1Ok, построенного на векторах  ,
,  ,
,  по формуле
по формуле  , где
, где  ,
,  , при этом найденные дальности усредняют и в конечный момент времени tµ последовательно для k=1, 2, …, µ восстанавливают все точки М1, М2, …, Mµ перемещения объекта на поверхности в системе координат наблюдателя на момент времени tµ и строят по найденным точкам пространственную траекторию движения объекта, необходимую для его дальнейшего сопровождения.
, при этом найденные дальности усредняют и в конечный момент времени tµ последовательно для k=1, 2, …, µ восстанавливают все точки М1, М2, …, Mµ перемещения объекта на поверхности в системе координат наблюдателя на момент времени tµ и строят по найденным точкам пространственную траекторию движения объекта, необходимую для его дальнейшего сопровождения.
| СПОСОБ НАБЛЮДЕНИЯ ЗА ВОЗДУШНЫМИ ОБЪЕКТАМИ И ПОВЕРХНОСТЬЮ НА БАЗЕ БОРТОВОЙ РЛС | 2005 |
|
RU2292060C1 |
| СПОСОБ НАБЛЮДЕНИЯ ЗА ПОВЕРХНОСТЬЮ И ВОЗДУШНОЙ ОБСТАНОВКОЙ НА БАЗЕ БОРТОВОЙ РЛС | 2005 |
|
RU2284548C1 |
| СПОСОБ ПОВЫШЕНИЯ РАДИОЛОКАЦИОННОГО РАЗРЕШЕНИЯ, СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ И СПОСОБ ДИСТАНЦИОННОГО ВЫЯВЛЕНИЯ СИСТЕМОЙ МАЛОРАЗМЕРНЫХ ОБЪЕКТОВ | 2004 |
|
RU2265866C1 |
| US 5442364 A, 15.08.1995 | |||
| US 5329286 A, 12.07.1994 | |||
| Устройство для получения потока сыпучих материалов с заданной плотностью | 1977 |
|
SU690315A1 |
| US 5896098 А, 20.04.1999. | |||

