ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
[0001] Настоящее изобретение относится к способу и системе для анализа характеристик водителя транспортного средства и создания оценки водителя для водителя.
УРОВЕНЬ ТЕХНИКИ
[0002] Современные транспортные средства типично оборудованы многообразием бортовых датчиков и компьютеров для измерения и регистрации рабочих характеристик, диагностики и данных местоположения транспортного средства. Эти устройства выдают значительное количество информации о характеристиках во время работы транспортного средства. Были предложены системы для сообщения характеристик вождения, таких как эффективность использования топлива, на основании использования данных, вырабатываемых из бортовых датчиков и компьютеров. Разные водители имеют разные стили вождения, и стили вождения могут оказывать влияние на характеристики для работы транспортного средства. Например, агрессивный водитель может разгоняться быстрее, чем менее агрессивный водитель, и может жестче и быстрее тормозить, чем менее агрессивный водитель. Более спокойный, заботящийся об эффективности или сочувствующий окружающей среде водитель может разгоняться медленнее или мягче, чем агрессивный водитель, и может тормозить спокойнее или постепеннее.
[0003] Характеристики водителя могут сравниваться с ожидаемыми, номинальными или целевыми характеристиками водителя для конкретного участка дороги. Однако некоторое количество дорожных условий/условий вождения могут оказывать сильное влияние на целевые или требуемые характеристики, таких как время суток, погода и видимость, интенсивность движения, тип дороги, и т.д. Поэтому, трудно определять ожидаемые или идеальные манеры или характеристики вождения для сравнения в аналогичных условиях для всех возможных местоположений и участков дороги.
РАСКРЫТИЕ ИЗОБРЕТЕНИЯ
Для преодоления по меньшей мере некоторых из проблем уровня техники в одном из аспектов изобретения предложено транспортное средство, содержащее:
компьютер транспортного средства, запрограммированный с возможностью:
хранения данных скорости транспортного средства в памяти, и
выведения оценки плавности транспортного средства на устройстве отображения, сформированной на основании интегрирования разности между скоростью транспортного средства, связанного с участком дороги, и номинальным профилем скорости множества транспортных средств, которые проехали по участку дороги, поделенному на расстояния участка дороги.
В одном из вариантов предложено транспортное средство, в котором оценка плавности формируется в удаленной сети, содержащей по меньшей мере один компьютер на связи с компьютером транспортного средства.
В одном из вариантов предложено транспортное средство, в котором компьютер выполнен с возможностью связи с беспроводным приемопередатчиком для обеспечения канала связи с удаленной сетью, содержащей по меньшей мере один компьютер, запрограммированный с возможностью вычисления номинального профиля скорости участка дороги.
В одном из вариантов предложено транспортное средство, в котором по меньшей мере один компьютер в удаленной сети дополнительно запрограммирован с возможностью вычисления среднеквадратического отклонения для номинального профиля скорости и сравнения оценки плавности со среднеквадратическим отклонением.
В одном из вариантов предложено транспортное средство, в котором компьютер дополнительно запрограммирован с возможностью формирования поездки на основании одного или более участков дороги, вычисления оценки плавности поездки на основании оценки плавности для каждого из одного или более участков дороги, при этом вывод оценки плавности на устройстве отображения происходит в ответ на прибытие в пункт назначения для поездки.
В одном из вариантов предложено транспортное средство, в котором пункт назначения основан на по меньшей мере одном из информации системы навигации, запроса выключения зажигания и сигнала, указывающего трансмиссию в положении PARK.
В одном из вариантов предложено транспортное средство, в котором вывод оценки плавности задерживается на основании заданного значения, сравниваемого с по меньшей мере одним из скорости транспортного средства и рабочей нагрузки водителя.
В одном из вариантов предложено транспортное средство, в котором устройством отображения является пользовательский интерфейс нестационарного устройства, который находится на связи с компьютером через беспроводный приемопередатчик.
В одном из дополнительных аспектов предложен способ оценивания водителя, включающий в себя этапы, на которых:
сохраняют в базе данных данные скорости вождения по участку дороги для множества транспортных средств;
вычисляют номинальный профиль скорости для участка дороги с использованием данных скорости вождения; и
отображают оценку плавности водителя на основании интегрирования разности между скоростью транспортного средства и номинального профиля скорости, связанного с участком дороги, поделенным на расстояния участка дороги.
В одном из вариантов предложен способ, дополнительно включающий в себя этап, на котором суммируют оценку плавности для множества участков дороги для формирования оценки плавности, связанной с поездкой.
В одном из вариантов предложен способ, дополнительно включающий в себя этап, на котором отображают оценку плавности для выбираемого пользователем предыдущего расстояния вождения.
В одном из вариантов предложен способ, дополнительно включающий в себя этап, на котором отображают мгновенную оценку плавности для текущего участка вождения.
В одном из вариантов предложен способ, дополнительно включающий в себя этап, на котором выдают предупредительный сигнал водителю в ответ на отклонение от номинального профиля скорости, превышающее заданное пороговое значение.
В одном из вариантов предложен способ, в котором предупредительный сигнал содержит по меньшей мере одно из слышимого сигнала, светового сигнала, вибрации рулевого колеса и вибрации педали.
В одном из вариантов предложен способ, дополнительно включающий в себя этап, на котором выдают сообщение рекомендации водителю на основании улучшения оценки плавности.
В одном из вариантов предложен способ, дополнительно включающий в себя этап, на котором передают оценку плавности на внешний компьютер.
В одном из еще дополнительных аспектов предложен сервер характеристик водителя, содержащий:
процессор, выполненный с возможностью связи с вычислительной системой транспортного средства (VCS), запрограммирован с возможностью:
определения участка дороги в ответ на данные транспортного средства, включающие в себя местоположение и скорость транспортного средства, принятые из VCS,
вычисления номинальной скорости для участка дороги на основании множества транспортных средств, которые проехали по участку дороги;
вычисления оценки плавности на основании интегрирования разности между номинальной скоростью и скоростью транспортного средства для участка дороги; и
передачи оценки плавности в VCS.
В одном из вариантов предложен сервер, в котором процессор дополнительно запрограммирован с возможностью формирования поездки на основании одного или более участков дороги, вычисления оценки плавности поездки на основании оценки плавности для каждого из участков дороги для одного или более участков дороги и выведения оценки плавности поездки в ответ на прибытие в пункт назначения для поездки.
В одном из вариантов предложен сервер, в котором процессор дополнительно запрограммирован с возможностью вычисления среднеквадратического отклонения для номинальной скорости и сравнения среднеквадратического отклонения для номинальной скорости со среднеквадратическим отклонением оценки плавности.
В одном из вариантов предложен сервер, в котором оценка плавности выполнена с возможностью выведения в виде графика сравнения оценки плавности с номинальной скоростью участка дороги.
[0004] КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
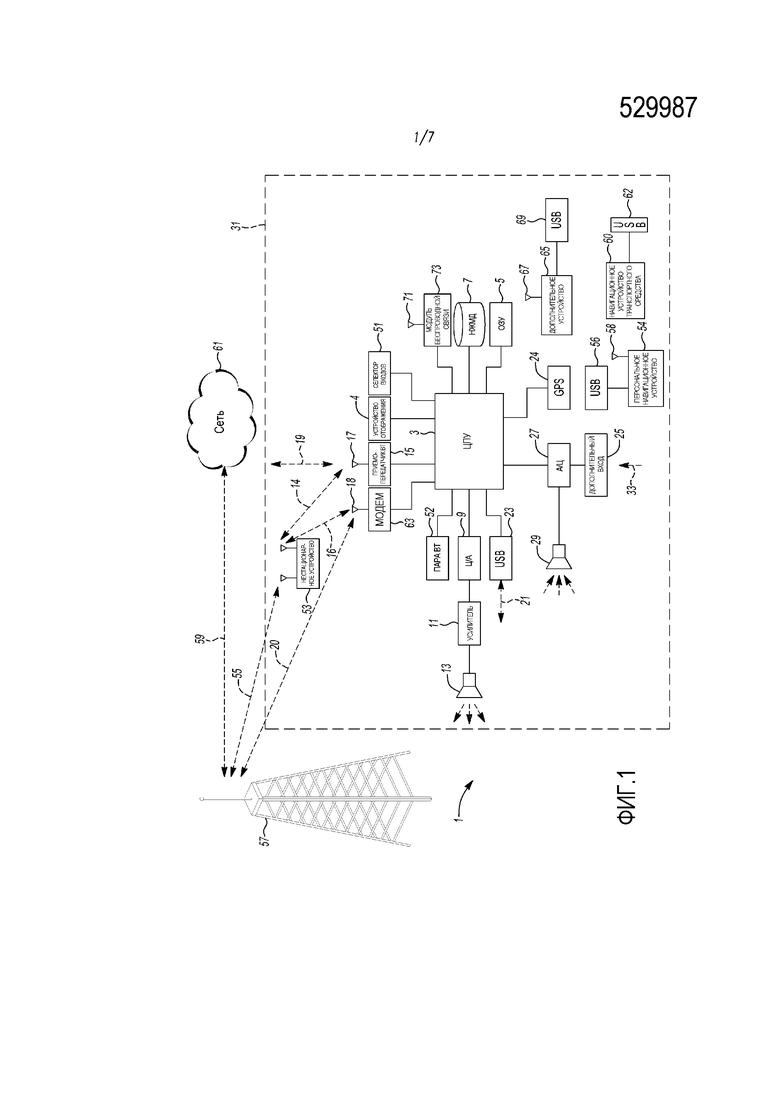
[0005] Фиг. 1 - примерная структурная схема информационно-развлекательной системы транспортного средства, реализующей интерактивную пользовательскую систему отображения информации о транспортном средстве;
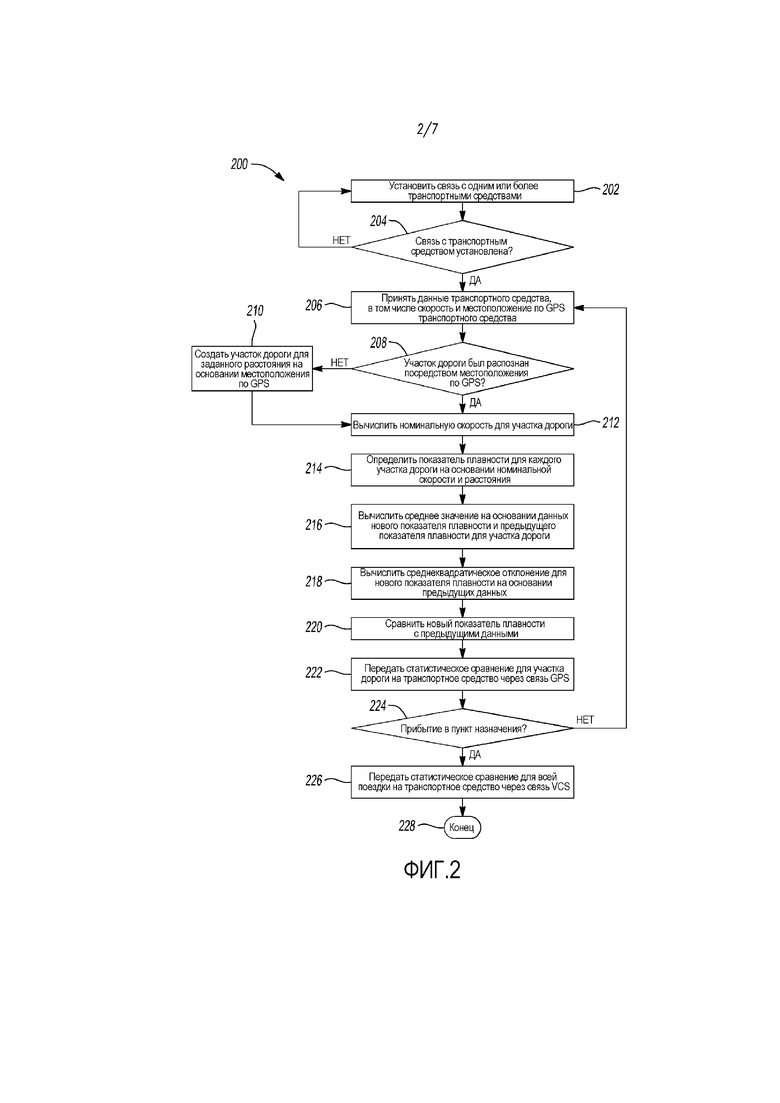
[0006] фиг. 2 - примерная последовательность операций для вычисления показателя плавности для участка дороги;
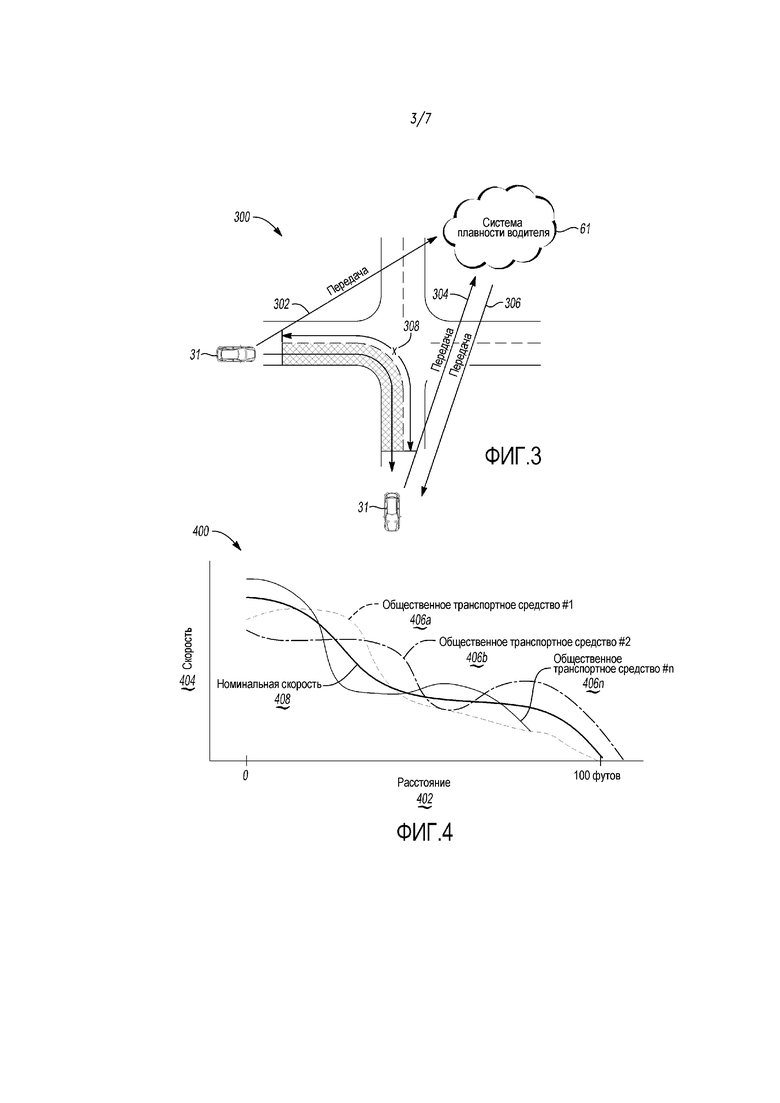
[0007] фиг. 3 иллюстрирует примерное событие вождения для вычислительной системы транспортного средства, сообщающей характеристики вождения на основании показателя плавности.
[0008] фиг. 4 иллюстрирует примерное событие вождения для вычислительной системы транспортного средства, сообщающей характеристики поездки на основании показателя плавности.
[0009] фиг. 5 иллюстрирует примерный график для номинальной скорости участка дороги;
[0010] фиг. 6 иллюстрирует примерный график для показателя плавности, основанного на номинальной скорости;
[0011] фиг. 7 иллюстрирует примерный график для показателя плавности транспортного средства по сравнению с другими транспортными средствами;
[0012] фиг. 8 иллюстрирует примерный график для балльной оценки поездки на основании характеристик поездки; и
[0013] фиг. 9 - примерная последовательность операций для вычислительной системы транспортного средства, поддерживающей связь с системой характеристик вождения.
ОПИСАНИЕ ПРЕДПОЧТИТЕЛЬНЫХ ВАРИАНТОВ ОСУЩЕСТВЛЕНИЯ ИЗОБРЕТЕНИЯ
[0014] Варианты осуществления настоящего изобретения описаны в материалах настоящего описания. Следует понимать, однако, что раскрытые варианты осуществления являются всего лишь примерами, и другие варианты осуществления могут принимать различные и альтернативные формы. Фигуры не обязательно должны определять масштаб; некоторые признаки могли быть преувеличены или сведены к минимуму, чтобы показать подробности конкретных компонентов. Поэтому, специфичные конструктивные и функциональные детали, раскрытые в материалах настоящего описания, не должны интерпретироваться в виде ограничивающих, а только качестве представляющих основу для изучения специалистом в данной области техники для различного применения вариантов осуществления. Как следует понимать рядовым специалистам в данной области техники, различные признаки, проиллюстрированные и описанные со ссылкой на любую одну из фигур, могут комбинироваться с признаками, проиллюстрированными на одной или более других фигур, для создания вариантов осуществления, которые не проиллюстрированы и не описаны явно. Проиллюстрированные комбинации признаков дают характерные варианты осуществления для типичных применений. Различные комбинации и модификации признаков, совместимых с доктринами настоящего изобретения, однако, могли бы требоваться для конкретных применений или реализаций.
[0015] Варианты осуществления настоящего изобретения в целом предусматривают множество схем или других электрических устройств. Все ссылки на схемы и другие электрические устройства, а также на функциональные возможности, предусмотренные каждым, не подразумеваются ограниченными охватом только того, что проиллюстрировано и описано в материалах настоящего описания. Несмотря на то, что конкретные таблицы могут быть предназначены для различных схем или других раскрытых электрических устройств, не подразумевается, что такие таблицы должны ограничивать объем работы для схем и других электрических устройств. Такие схемы и другие электрические устройства могут комбинироваться друг с другом и/или разделяться любым образом на основании конкретного типа электрической реализации, которая требуется. Осознается, что любая схема или другое электрическое устройство, раскрытое в материалах настоящего описания, может включать в себя любое количество микропроцессоров, интегральных схем, устройств памяти (например, флэш-память (FLASH), оперативное запоминающее устройство (ОЗУ, RAM), постоянное запоминающее устройство (ПЗУ, ROM), электрически программируемое постоянное запоминающее устройство (ЭППЗУ, EPROM), электрически стираемое программируемое постоянное запоминающее устройство (ЭСППЗУ, EEPROM) или другие пригодные их варианты) и программное обеспечение, которые взаимодействуют друг с другом для выполнения операций, раскрытых в материалах настоящего описания. В дополнение, любые одно или более из электрических устройств могут быть выполнены с возможностью выполнять компьютерную программу, которая воплощена на постоянном машиночитаемом носителе, который запрограммирован выполнять любое количество функций, как раскрыто.
[0016] Раскрытие относится к системам и способам формирования номинального профиля скорости для нескольких разных участков дороги на основании генеральной совокупности данных скорости транспортных средств. Системы и способы могут принимать профиль скорости, включающий в себя другие дорожные условия и/или условия вождения, для вычисления номинального профиля для каждого участка дороги. Системы и способы могут выдавать назначенную транспортному средству балльную оценку «плавности» для каждого участка дороги на основании отклонения от номинального профиля. Например, транспортное средство может принимать данные обратной связи на основании характеристик «плавности», вычисленных по статистическому распределению генеральной совокупности балльных оценок «плавности» для данного участка дороги.
[0017] Системы и способы могут выводить оценку характеристик с обратной связью. Оценка характеристик с обратной связью может быть основана на отклонениях, выдаваемых с выборочными временными характеристиками с использованием серьезности отклонения «плавности» и других показателей. Например, отклонение, превышающее пороговое значение, может инициировать немедленное предупреждение наряду с тем, что в целом «неплавное» вождение с отклонением, меньшим, чем пороговое значение, но большим, чем другое пороговое значение, может инициировать рекомендацию «плавности» в конце поездки. Системы и способы могут выводить предупреждение для участка дороги, если необходимо, или сообщение, синтезированное в общую рекомендацию по характеристике «плавности» за всю поездку.
[0018] Фиг. 1 иллюстрирует примерную структурную схему для расположенной на транспортном средстве вычислительной системы 1 (VCS) для транспортного средства 31. Примером такой расположенной на транспортном средстве вычислительной системы 1 является система SYNC, произведенная компанией FORD MOTOR. Транспортное средство, поддерживающее расположенную на транспортном средстве вычислительную систему, может содержать в себе визуальный интерфейс 4 клиентской части и/или HUD (приборную панель на ветровом стекле, не показана), расположенные в транспортном средстве. Пользователь также может быть способным взаимодействовать с интерфейсом, если он, например, оснащен сенсорным экраном. В еще одном иллюстративном варианте осуществления, взаимодействие происходит через нажатия кнопок и/или речевую диалоговую систему с автоматически распознаванием речи и синтезом речи.
[0019] В иллюстративном варианте осуществления, показанном на фиг. 1, процессор 3 управляет по меньшей мере некоторой частью работы расположенной на транспортном средстве вычислительной системы. Предусмотренный внутри транспортного средства процессор предоставляет возможность бортовой обработки команд и процедур. Кроме того, процессор присоединен как к непостоянному 5, так и постоянному запоминающему устройству 7. В этом иллюстративном варианте осуществления, непостоянное запоминающее устройство является оперативным запоминающим устройством (ОЗУ, RAM), а постоянное запоминающее устройство является накопителем на жестком диске (НЖМД, HDD) или флэш-памятью. Вообще, постоянная (энергонезависимая) память может включать в себя все формы памяти, которые сохраняют данные, когда питание компьютера или другого устройства выключено. Таковые включают в себя, но не в качестве ограничения, НЖМД, CD (компакт-диски), DVD (цифровые многофункциональные диски), магнитные ленты, твердотельные накопители, портативные накопители с интерфейсом USB и любую другую пригодную форму постоянной памяти.
[0020] Процессор также оснащен некоторым количеством разных устройств ввода, предоставляющих пользователю возможность взаимодействовать с процессором. В этом иллюстративном варианте осуществления, микрофон 29, вспомогательное устройство 25 ввода (для входных данных 33), устройство 23 ввода USB, устройство 24 ввода GPS, экран 4, который может быть дисплеем с сенсорным экраном, и устройство 15 ввода BLUETOOTH (BT) все предусмотрены. Селектор 51 входов также предусмотрен, чтобы предоставлять пользователю возможность переключаться между различными устройствами ввода. Ввод как в микрофон, таки вспомогательный разъем преобразуется из аналоговой формы в цифровую преобразователем 27 перед пересылкой в процессор. Хотя не показано, многочисленные компоненты и вспомогательные компоненты транспортного средства на связи с VCS могут использовать сеть транспортного средства (такую как, но не в качестве ограничения шину CAN (локальной сети контроллеров)) для передачи данных в и из VCS (или ее компонентов).
[0021] Устройства вывода у системы могут включать в себя, но не в качестве ограничения, визуальное устройство 4 отображения, HUD и громкоговоритель 13 или устройство вывода стереофонической системы. Громкоговоритель 13 присоединен к усилителю 11 и принимает свои сигналы из процессора 3 через цифро-аналоговый преобразователь 9. Вывод также может производиться на удаленное устройство BLUETOOTH, такое как PND 54, или устройство USB, такое как навигационное устройство 60 транспортного средства, по двунаправленным потокам данных, показанным под 19 и 21, соответственно.
[0022] В одном из иллюстративных вариантов осуществления, система 1 использует приемопередатчик 15 BLUETOOTH для связи 17 с мобильным устройством 53 пользователя (например, сотовым телефоном, интеллектуальным телефоном, PDA (персональным цифровым секретарем) или любым другим карманным устройством, имеющим возможность беспроводного удаленного сетевого соединения). Карманное устройство 53, в таком случае, может использоваться для связи 59 с сетью 61 вне транспортного средства 31, например, через связь 55 с вышкой 57 сотовой связи. В некоторых вариантах осуществления, вышка 57 может быть точкой доступа WiFi.
[0023] Примерная связь между карманным устройством 53 и приемопередатчиком BLUETOOTH представлена сигналом 14.
[0024] Образование пары карманного устройства 53 и приемопередатчика 15 BLUETOOTH может указываться инструкцией через кнопку 52 или подобное устройство ввода. Соответственно, ЦПУ дается инструкция, что бортовой приемопередатчик BLUETOOTH будет спарен с приемопередатчиком BLUETOOTH в карманном устройстве.
[0025] Данные могут передаваться между ЦПУ 3 и сетью 61, например, с использованием плана данных, данных вместе с голосом или тонов DTMF (двухтонального многочастотного набора), связанных с мобильным устройством 53. В качестве альтернативы, может быть желательным включать в состав бортовой модем 63, имеющий антенну 18, чтобы передавать 16 данные между ЦПУ 3 и сетью 61 через диапазон тональных частот. Карманное устройство 53, в таком случае, может использоваться для связи 59 с сетью 61 вне транспортного средства 31, например, через связь 55 с вышкой 57 сотовой связи. В некоторых вариантах осуществления, модем 63 может устанавливать связь 20 с вышкой 57 для связи с сетью 61. В качестве неограничивающего примера, модем 63 может быть сотовым USB-модемом, а связь 20 может быть сотовой связью.
[0026] В одном из проиллюстрированных вариантов осуществления, процессор снабжен операционной системой, включающей в себя API (программный интерфейс приложения) для связи с прикладным программным обеспечением модема. Прикладное программное обеспечение модема может осуществлять доступ к встроенному модулю или микропрограммному обеспечению в приемопередатчике BLUETOOTH для выполнения беспроводной связи с удаленным приемопередатчиком BLUETOOTH (таким как обнаруживаемый в мобильном устройстве). Bluetooth является подмножеством протоколов PAN (персональной сети) IEEE 802. Протоколы LAN (локальной сети) IEEE 802 включают в себя WiFi и имеют значительные пересекающиеся функциональные возможности с PAN IEEE 802. Обе пригодны для беспроводной связи внутри транспортного средства. Еще одним средством связи, которое может использоваться в этой сфере, является оптическая связь в свободном пространстве (такая как IrDA) и нестандартизованные потребительские (инфракрасные, IR) ИК-протоколы.
[0027] В еще одном варианте осуществления, карманное устройство 53 включает в себя модем для передачи данных в диапазоне тональных частот и широковещательной передачи данных. В варианте осуществления данных вместе с голосом, технология, известная как мультиплексирование с частотным разделением каналов, может быть реализована, когда владелец карманного устройства может разговаривать через устройство, в то время как передаются данные. В другие моменты времени, когда владелец не является использующим устройство, пересылка данных может использовать всю ширину полосы пропускания (от 300 Гц до 3,4 кГц в одном из примеров). Несмотря на то, что мультиплексирование с частотным разделением каналов может быть общепринятым для аналоговой сотовой связи между транспортным средством и сетью Интернет и по-прежнему использоваться, оно в значительной степени было замещено гибридными системами множественного доступа с кодовым разделением каналов (CDMA), множественного доступа с временным разделением каналов (TDMA), множественного доступа с пространственным разделением каналов (SDMA) для цифровой сотовой связи. Все эти являются совместимыми с ITU IMT-2000 (Международной мобильной связью 2000 Международного союза электросвязи) (3G (третьего поколения)) стандартами и предлагают скорости передачи данных вплоть до 2 Мбит/с для неподвижных и переходящих с места на место пользователей, и 385 кбит/с для пользователей в движущемся транспортном средстве. Стандарты 3G теперь замещаются IMT-Advanced (расширенный IMT) (4G (четвертого поколения)), которая предлагает 100 Мбит/с для пользователей в транспортных средствах и 1 Гбит/с для неподвижных пользователей. Если пользователь имеет план данных, связанный с мобильным устройством, возможно, что план данных предусматривает широкополосную передачу, и система могла бы использовать гораздо более широкую полосу пропускания (ускоряя пересылку данных). В еще одном другом варианте осуществления, карманное устройство 53 заменено сотовым устройством связи (не показано), которое установлено на транспортное средство 31. В еще одном другом варианте осуществления, карманное устройство 53 может быть устройством беспроводной локальной сети (LAN), например, способным к связи через сеть стандарта 802.11g (то есть, WiFi) или сеть WiMax.
[0028] В одном из вариантов осуществления, поступающие данные могут пересылаться через карманное устройство 53 посредством данных вместе с речью или плана данных, через бортовой приемопередатчик BLUETOOTH и во внутренний процессор 3 транспортного средства. В случае определенных временных данных, например, данные могут храниться на НЖМД или других запоминающих носителях 7 до того момента времени, когда данные больше не нужны.
[0029] Дополнительные источники, которые могут взаимодействовать с транспортным средством, включают в себя персональное навигационное устройство 54, например, имеющее USB-соединение 56 и/или антенну 58, навигационное устройство 60 транспортного средства, имеющее USB 62 или другое соединение, бортовое устройство 24 GPS или удаленную навигационную систему (не показана), имеющую возможность соединения с сетью 61. USB является одним из класса последовательных сетевых протоколов. Последовательные протоколы IEEE 1394 (FireWire™ (Apple), i.LINK™ (Sony) и Lynx™ (Texas Instruments)), EIA (Ассоциации электронной промышленности), IEEE 1284 (стандартный параллельный порт), S/PDIF (цифровой формат соединения Sony/Philips) и USB-IF (сообщества производителей устройств USB) формируют основу стандартов последовательной связи между устройствами. Большинство протоколов могут быть реализованы для электрической или оптической связи. Система может передавать данные, принятые из карманного устройства и/или дополнительных источников, на одно или более устройств вывода. Одно или более устройств вывода могут включать в себя, но не в виде ограничения, устройство 4 отображения, громкоговоритель 29, HUD (не показана) и/или их комбинацию.
[0030] Кроме того, ЦПУ могло бы находиться на связи с многообразием других вспомогательных устройств 65. Эти устройства могут соединяться через беспроводное 67 или проводные 69 соединения. Вспомогательное устройство 65 может включать в себя, но не в виде ограничения, персональные мультимедийные проигрыватели, беспроводные устройства здравоохранения, портативные компьютеры, и тому подобное.
[0031] К тому же, или в виде альтернативы, ЦПУ могло бы быть присоединено к расположенному на транспортном средстве беспроводному маршрутизатору 73, например, с использованием приемопередатчика WiFi 71 (стандарта IEEE 803.11). Это могло бы предоставить ЦПУ возможность присоединяться к удаленным сетям в пределах досягаемости локального маршрутизатора 73.
[0032] В дополнение к наличию в распоряжении примерных последовательностей операций, выполняемых вычислительной системой транспортного средства, расположенной в транспортном средстве, в определенных вариантах осуществления, примерные последовательности операций могут выполняться вычислительной системой на связи с вычислительной системой транспортного средства. Такая система может включать в себя, но не в качестве ограничения, карманное устройство (например, без ограничения, мобильный телефон) или удаленную вычислительную систему (например и без ограничения, сервер), присоединенную через карманное устройство. Вместе, такие системы могут указываться ссылкой как ассоциированные с транспортным средством вычислительные системы (VACS). В некоторых вариантах осуществления, конкретные компоненты VACS могут выполнять конкретные части последовательности операций в зависимости от конкретной реализации системы. В качестве примера, а не ограничения, если последовательность операций имеет этап отправки или приема информации с парным карманным устройством, то вероятно, что карманное устройство не выполняет последовательность операций, поскольку карманное устройство «не отправляло бы и не принимало бы» информацию с самим собой. Рядовой специалист в данной области техники будет понимать, когда неуместно применять конкретную VACS к данному решению. Во всех решениях, предполагается, что по меньшей мере вычислительная система транспортного средства (VCS), расположенная в самом транспортном средстве, способна к выполнению примерных последовательностей операций.
[0033] Фиг. 2 - примерный способ 200 вычисления показателя плавности для участка дороги в сети 61. Способ 200 может быть реализован с использованием программно реализованной управляющей программы, содержащейся в сети 61 (например, сервере 61), и выполняться в системе, включающей в себя один или более процессоров на сервере 61, в VCS 1 на связи с сервером 61, в процессоре на связи с сервером 61 и/или их комбинации. В других вариантах осуществления, способ 200 может быть реализован в других процессорах транспортного средства или распределен среди многочисленных процессоров на связи с сервером 61.
[0034] Вновь со ссылкой на фиг. 2, транспортное средство 31 и его компоненты, проиллюстрированные на фиг. 1, упоминаются на всем протяжении описания способа 200 для облегчения понимания различных аспектов настоящего изобретения. Способ 200 вычисления номинального профиля скорости для нескольких разных участков дороги и вывода балльной оценки характеристик водителя (то есть, оценки характеристик с обратной связью) на основании события вождения, сопоставленного с профилем участка дороги, может быть реализован через компьютерный алгоритм, машинно-исполняемую управляющую программу, программные команды, запрограммированные в пригодное программируемое логическое устройство(а) на сервере 61, такое как процессор, модуль управления нестационарного устройства 53 на связи с сервером 61, VCS 1 на связи с сервером 61 или их комбинация. Хотя различные операции, показанные на диаграмме 200 блок-схемы последовательности операций способа, производят впечатление, что должны происходить в хронологической последовательности, по меньшей мере некоторые из операций могут происходить в ином порядке, а некоторые операции могут выполняться одновременно или не выполняться вовсе.
[0035] На этапе 202, система может разыскивать канал связи с VCS одного или более транспортных средств. Система может устанавливать связь с транспортным средством на основании распознанной VCS 1 на этапе 204. Система может распознавать VCS 1 на основании удостоверения защиты, принятого из VCS 1.
[0036] Например, система может включать в себя интерфейс сервера, сделанный имеющимся в распоряжении у других приложений VCS 1 через программный интерфейс приложений (API). Интерфейс сервера может давать другим приложениям VCS, которые являются принимающими данные, связанные с условиями вождения и/или дорожным условиям, возможность передавать данные на сервер 61. В примере, API может быть зарегистрирован в службе плавности транспортного средства, выполненной с возможностью определять доступ к одному или более процессоров сервера 61, а также связанным поддерживаемым функциям. Если приложение транспортного средства предпочло бы поддерживать связь с сервером 61, приложение может запрашивать выполнение этого с использованием открытого API. API может действовать соответствующим образом в виде посредника для преобразования и выполнения запроса запрашивающего приложения, в том числе, зарегистрированных данных, погодных условий, дорожных условий или принятой информации из других процессоров на связи с VCS 1.
[0037] В еще одном примере, VCS 1 может быть выполнена с возможностью передавать информацию о транспортном средстве на основании участка дороги на сервер 61. Сервер 61 может принимать информацию из VCS 1 и вычислять одну или более переменных манер вождения для участка дороги. VCS 1 может передавать информацию о транспортном средстве на сервер через API системы.
[0038] На этапе 206, система может принимать данные транспортного средства, в том числе, скорость транспортного средства, посредством спидометра или эквивалентных датчиков и данные местоположения по глобальной системе определения местоположения (GPS). Система может определять, распознан ли участок дороги на основании данных местоположения. Например, система может распознавать участок дороги на основании заданного расстояния местоположения транспортного средства, как показано на фиг. 3.
[0039] Фиг. 3 иллюстрирует примерное событие 300 вождения для VCS 1, обменивающейся информацией о характеристиках вождения с системой 61 плавности водителей. Система 61 плавности водителей может быть на беспроводной связи с VCS 1. В одном из вариантов осуществления, система 61 может находиться на связи с VCS 1 через нестационарное устройство 53.
[0040] В ответ на установленный канал связи с VCS 1, система 61 может принимать первую передачу 302, выдающую данные транспортного средства, в том числе, но не в виде ограничения, текущее местоположение по GPS. Система 61 может определять участок 308 дороги на основании местоположения по GPS. Участок 308 дороги может быть задан системой 61 в виде поворота, прямого участка, изгиба, слияния полос движения, возвышенности, мощеной/немощеной дороги, перехода полосы движения, подъездной дороги, въезда, федеральной автострады, автомагистрали, проезда в жилой зоне, перекрестка и/или их комбинации.
[0041] Система 61 может извлекать распознанный участок 308 дороги из базы данных (не показана). Система 61 может принимать вторую передачу 304 из VCS 1, предоставляющую данные транспортного средства для участка дороги, распознанного и только что пройденного транспортным средством. Система 61 может наполнять базу данных принятыми данными транспортных средств для участка 308 дороги. Система 61 может вычислять плавность водителя на основании данных транспортного средства по сравнению с предыдущими данными транспортного средства, подвергнутого прохождению по участку 308 дороги. VCS 1 может принимать третью передачу 306 из системы 61, предоставляющую балльную оценку плавности водителя для участка 308 дороги.
[0042] Как также показано на фиг. 2, на этапе 208, система может определять, распознан ли участок дороги в виде предыдущего участка дороги, сохраненного в базе данных, на основании местоположения по GPS. Если участок дороги не распознан на основании местоположения, система 61 может создавать участок дороги для заданного расстояния дороги на основании местоположения по GPS в операции 210.
[0043] На этапе 212, система может вычислять номинальную скорость для участка дороги. Номинальная скорость основана на профиле скорости транспортного средства, проходящего от края до края участка дороги, как показано на фиг. 4. Уравнение номинальной скорости является следующим:
[0044] Номинальная скорость= (1)
(1)
[0045] где PublicVeh1 ... PublicVehn представляют профили скорости транспортного средства по разным транспортным средствам, проезжающим через участок дороги, а Distance представляет расстояние по поверхности дороги участка дороги.
[0046] Фиг. 4 иллюстрирует примерный график 400 для номинальной скорости участка 308 дороги. График 400 включает в себя ось 402 x, изображающую расстояние, и ось 404 y, изображающую скорость. График 400 прослеживает одно или более общественных транспортных средств, представленных на кривой 406, которые проехали раньше по участку 308 дороги. Система может соотносить данные участка 308 дороги на основании нескольких показателей, в том числе, но не в качестве ограничения, транспортного потока, времени суток, погоды, месяца года и/или их комбинации.
[0047] В ответ на данные транспортного средства, связанные с участком дороги, принятым из VCS 1, система может формировать скорость для транспортного средства 31. На основании данных, проиллюстрированных на графике 400, система может формировать номинальную скорость 408 для участка 308 дороги. График 400 дает наглядное сравнение скорости транспортного средства по сравнению с точками данных одного или более общественных транспортных средств для участка 308 дороги. Например, номинальная скорость 408 может формироваться с использованием данных, связанных с общественным транспортным средством 406A номер один, общественным транспортным средством 406B номер два, и т.д., вплоть до данных nого общественного транспортного средства 406C, хранимых в базе данных. Система может формировать новую номинальную скорость для участка 308 дороги на основании принятых данных из VCS 1.
[0048] На этапе 214, система может определять показатель плавности для участка 308 дороги на основании номинальной скорости и расстояния. В одном из вариантов осуществления, показатель плавности определяется согласно:
[0049] Показатель плавности= (2)
(2)
[0050] где  - вычисленная скорость для транспортного средства 31,
- вычисленная скорость для транспортного средства 31,  - номинальная скорость для участка дороги, основанная на предыдущих данных, принятых с предыдущих транспортных средств(а), которые проехали по участку дороги, а Distance - совокупное расстояние участка дороги. Уравнение показателя плавности является определенным интегралом для разности между транспортным средством 31 по сравнению с предыдущими транспортными средствами 406, которые проехали участок 308 дороги. Система может определять показатель плавности для транспортного средства 31 на основании принятых данных 506 транспортных средств для участка 308 дороги, как показано на фиг. 5.
- номинальная скорость для участка дороги, основанная на предыдущих данных, принятых с предыдущих транспортных средств(а), которые проехали по участку дороги, а Distance - совокупное расстояние участка дороги. Уравнение показателя плавности является определенным интегралом для разности между транспортным средством 31 по сравнению с предыдущими транспортными средствами 406, которые проехали участок 308 дороги. Система может определять показатель плавности для транспортного средства 31 на основании принятых данных 506 транспортных средств для участка 308 дороги, как показано на фиг. 5.
[0051] Фиг. 5 иллюстрирует примерный график 500 для показателя плавности, основанного на данных транспортного средства 31 по сравнению с номинальной скоростью 408 для участка 308 дороги. График 500 включает в себя ось 502 x, изображающую расстояние, и ось 504 y, изображающую скорость. Система может вычислять скорость 506 транспортного средства для транспортного средства 31 на основании принятых данных транспортного средства. График иллюстрирует скорость 506 транспортного средства и номинальную скорость 408 для участка 308 дороги.
[0052] Показатель 508 плавности является разностью между скоростью 506 транспортного средства, принятой с транспортного средства 31, которое только что проезжало по участку 308 дороги, по сравнению с номинальной скоростью 408 для участка 308 дороги. Показатель 508 плавности имеет значение площади под кривой, поделенной на расстоянии участка 308 дороги, как изложено в уравнении (2).
[0053] На этапе 216, система может вычислять обновленное среднее значение плавности на основании последнего вычисленного показателя 508 плавности и предыдущих данных показателя плавности для участка 308 дороги. Например, система может вычислять номинальный показатель плавности на основании суммы значений показателя плавности общественных транспортных средств, поделенной на количество замеров для участка 308 дороги, как представлено следующим:
[0054] Номинальный показатель плавности= (3)
(3)
[0055] На этапе 218, система может вычислять обновленное среднеквадратическое отклонение для показателя плавности на основании значений показателя плавности для общественных транспортных средств. Система может сравнивать обновленный показатель плавности с предыдущими данными, связанными с участком дороги, на этапе 220. Например, система может вычислять отклонение плавности на основании следующего уравнения:
[0056] Отклонение плавности= (4)
(4)
[0057] Отклонение плавности дает значение, которое сравнивает транспортное средство 31, ведомое пользователем, с номинальным и среднеквадратическим отклонением для других транспортных средств, которые были проведены по такому участку дороги. Отклонение плавности дает статистическое значение, так чтобы водитель, или другая принимающая сущность, могли понимать и сравнивать свои характеристики вождения с другими водителями, которые эксплуатировали транспортное средство на протяжении участка дороги. Система может передавать статистическое сравнение для участка 308 дороги с транспортным средством посредством канала связи VCS на этапе 222. Статистическое сравнение может давать наглядное сравнение показателя плавности водителя транспортного средства с номинальным показателем для участка дороги, как показано на фиг. 6.
[0058] Фиг. 6 иллюстрирует примерный график 600 для показателя 508 плавности транспортного средства по сравнению с другими транспортными средствами. График 600 включает в себя ось x, изображающую участок 308 дороги, и ось y, изображающую показатель 602 плавности участка дороги. Система может выводить номинальный показатель 604 плавности на графике 600 в виде вычисленного в уравнении (3). Система может выводить вычисленное среднеквадратическое отклонение 606 показателя плавности для участка дороги. Например, система может выводить одно среднеквадратическое отклонение (606A, 606B) по каждую сторону от номинального показателя 604 плавности. Система может выводить показатель плавности водителя на графике 600 для сравнения характеристик водителя относительно диапазона, охватывающего одно среднеквадратическое отклонение от номинального показателя 604 плавности для такого участка 308 дороги.
[0059] На этапе 224, система может проверять, прибыло ли транспортное средство 31 в пункт назначения. Например, система может определять, прибыло ли транспортное средство в свой пункт назначения, на основании нескольких показателей, в том числе, принятых данных транспортного средства, указывающих, что транспортное средство находится на передаче трансмиссии PARK, принятых данных транспортного средства, указывающих достигнутый пункт назначения на основании информации, принятой в системе навигации, принятых данных транспортного средства, указывающих запрос выключения зажигания водителем, и/или их комбинации. Если водитель не прибыл в пункт назначения на основании одного или более из нескольких показателей, система может продолжать вычислять показатель плавности на операциях с 206 по 224. Если водитель прибыл в пункт назначения, система может начинать строить характеристики водителя для поездки, объединяя пройденные участки(ок) 308 дороги, как показано на фиг. 7.
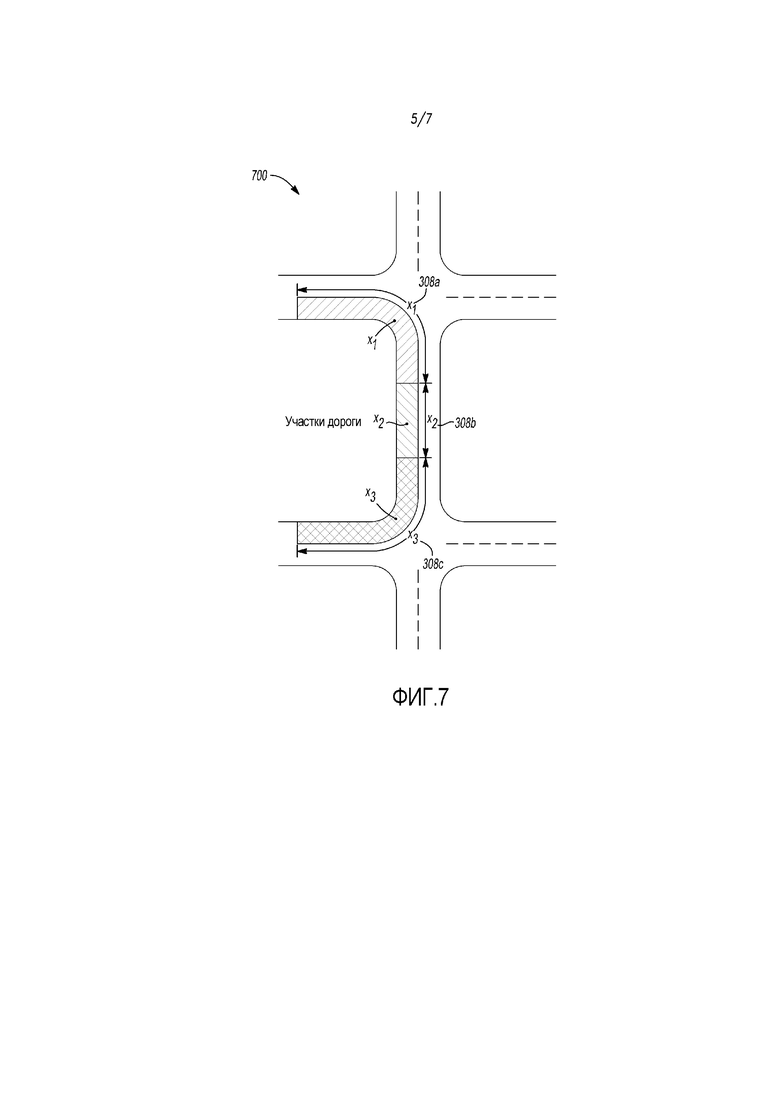
[0060] Фиг. 7 иллюстрирует примерное событие 700 вождения для VCS 1, сообщающей характеристики поездки на основании пройденного участка(ов) 308 дороги. Система плавности водителей может объединять все участки 308 дороги для поездки на основании местоположения по GPS. Например, система может распознавать и объединять участки 308a, 308b и 308c дороги в виде поездки на основании данных GPS. В еще одном примере, система может объединять поездку водителя на основании системы навигации на связи с системой через VCS 1. Поездка может быть определена посредством отслеживания местоположения транспортного средства для события цикла ключа зажигания (например, такого как от включения ключа зажигания до включения ключа зажигания). В еще одном варианте осуществления, поездка может быть определена в виде периода времени, полных суток и/или периода проката.
[0061] Система может распознавать один или более участков дороги, как пояснено на этапах 206-212. Как показано на фиг. 7, система может объединять участки 308a, 308b, 308c дороги, и т.д., когда конец поездки выявлен для события 700 вождения. Система может вычислять показатель плавности для каждого участка 308 дороги поездки.
[0062] На этапе 226, система может передавать статистическое сравнение для всей поездки на транспортное средство через канал связи VCS. Статистическое сравнение для полной поездки может давать наглядное сравнение показателя плавности водителя по сравнению с другими двумя, которые проехали по одному или более участкам 308 дороги. Статистическое сравнение для всей поездки может отображаться на пользовательском интерфейсе VCS, пользовательском интерфейсе нестационарного устройства и/или их комбинации. Статистическое сравнение для полной поездки дает график характеристик поездки, как показанный на фиг. 8.
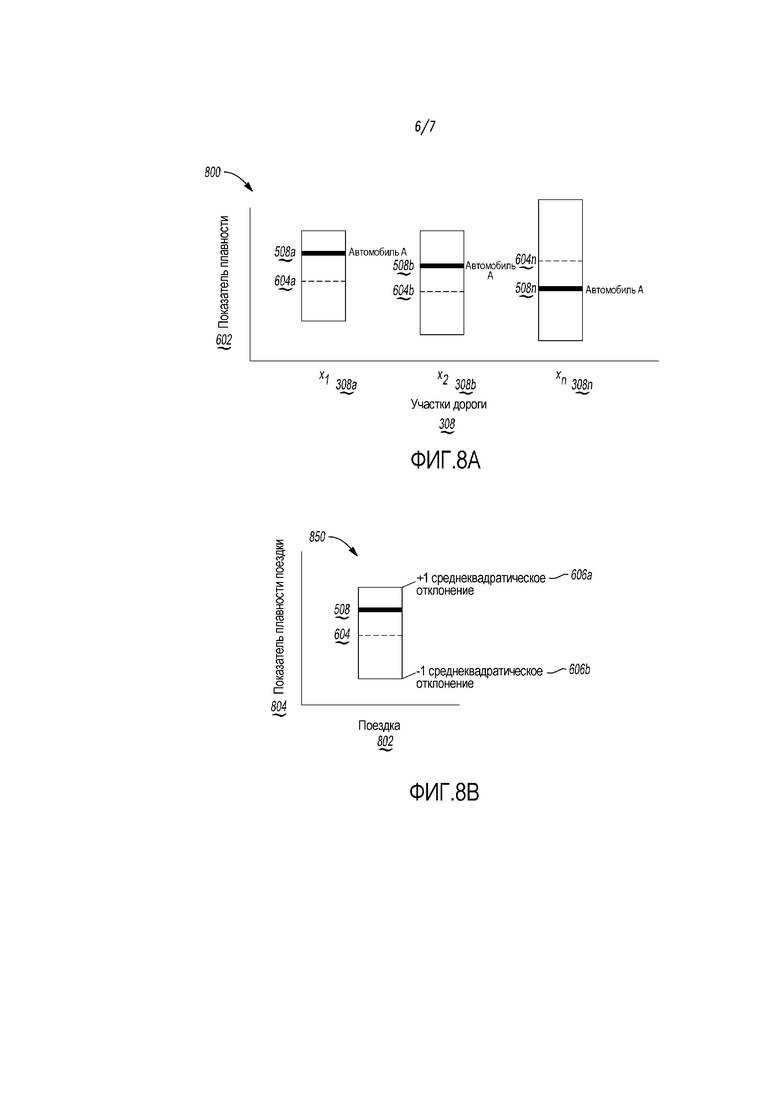
[0063] Фиг. 8A иллюстрирует примерный график 800 для балльной оценки поездки на основании характеристик поездки. График 800 включает в себя ось x, изображающую участки 308 дороги, и ось y, изображающую показатель 602 плавности. Система может выводить номинальный показатель 604 плавности для каждого участка 308 дороги на графике 800 в виде вычисленного в уравнении (3). Система может выводить показатель 508 плавности на графике 800, так чтобы водитель мог наглядно сравнивать показатель 508 плавности с номинальным показателем плавности или диапазоном показателей для такого участка 308 дороги.
[0064] Например, в ответ на первый участок 308a дороги поездки, график 800 может выводить номинальный показатель 604a плавности и показатель 508a плавности. В ответ на второй участок 308b дороги поездки, график 800 может выводить номинальный показатель 604b плавности и показатель 508b плавности. Система может продолжать выводить номинальный показатель 508n плавности и показатель 604n плавности для каждого дополнительного участка 308n дороги поездки.
[0065] Система может объединять все балльные оценки участков дороги для получения полной балльной оценки поездки, как показано на фиг. 8B. Полная балльная оценка поездки может быть графиком 850 для показателя 508 плавности поездки транспортного средства по сравнению с данными другого транспортного средства, проведенного по участкам дороги поездки. График 850 включает в себя ось x, изображающую поездку 802, и ось y, изображающую показатель 804 плавности поездки. Система может выводить вычисленное среднеквадратическое отклонение 606a, 606b показателя плавности для поездки. Система может выводить показатель 508 плавности водителя для поездки на графике 850 относительно диапазона номинальных значений, таких как одно среднеквадратическое отклонение 606a, 606b от номинального показателя 604 плавности для поездки. Как только данные были переданы в VCS, система может деактивировать канал связи на этапе 228.
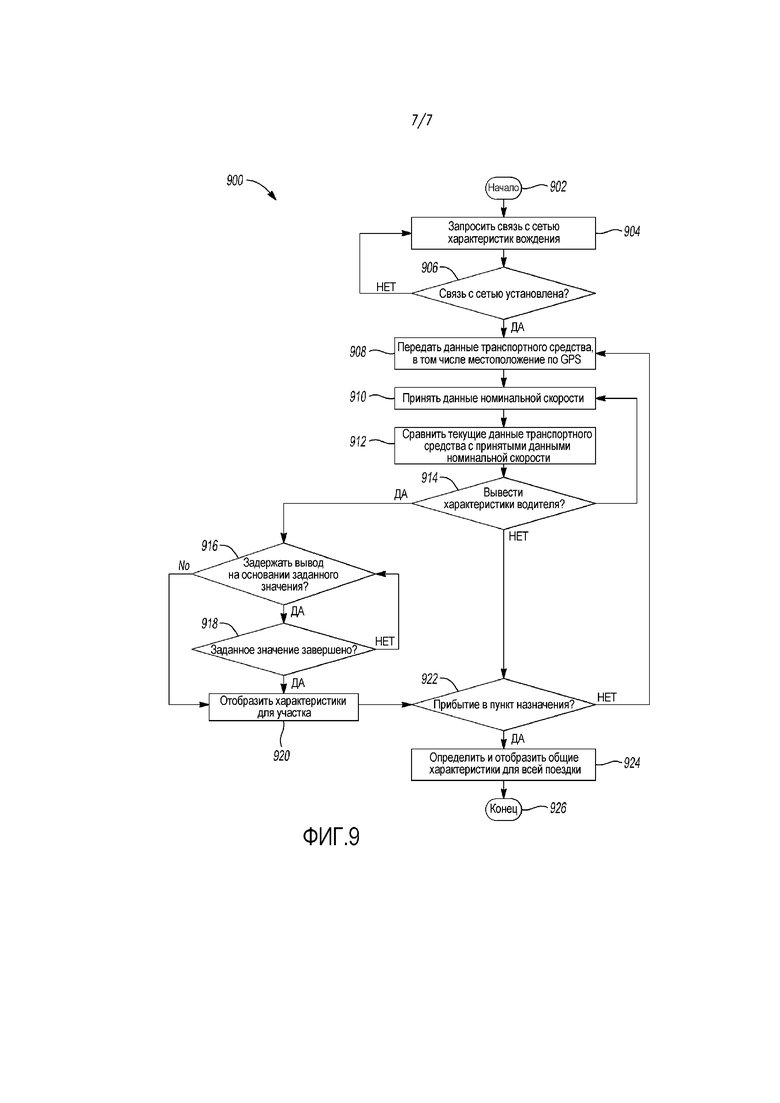
[0066] Фиг. 9 - примерный способ 900 для вычислительной системы 1 транспортного средства, поддерживающей связь с системой 61 характеристик вождения. Способ 900 вычисления показателя плавности для каждого участка дороги может быть реализован посредством компьютерного алгоритма, машинно-исполняемой управляющей команды или программных команд, запрограммированных в пригодное программируемое логическое устройство(а) в процессоре 3 транспортного средства, на сервере 61, в нестационарном устройстве 53 или их комбинации. Хотя различные операции, показанные на диаграмме 900 блок-схемы последовательности операций способа, производят впечатление, что должны происходить в хронологической последовательности, по меньшей мере некоторые из операций могут происходить в ином порядке, а некоторые операции могут выполняться одновременно или не выполняться вовсе.
[0067] На этапе 902, способ показателя плавности может активироваться на основании одного или более входных сигналов, в том числе, но не в виде ограничения, события включения зажигания, запроса запуска, принятого на пользовательском интерфейсе VCS, заданного таймера показателя плавности и/или их комбинации. VCS 1 может запрашивать связь с сетью 61 системы характеристик вождения на этапе 904.
[0068] На этапе 906, VCS 1 может проверять, что канал связи установлен с сетью 61. Например VCS 1 может устанавливать связь с сетью 61 характеристик водителя с использованием нестационарного устройства, спаренного с VCS 1. В еще одном примере, VCS 1 может иметь встроенный модем и/или встроенный сотовый телефон для установления прямой связи с сетью 61.
[0069] На этапе 908, как только канал связи установлен с сетью 61, VCS 1 может передавать данные транспортного средства, в том числе, местоположение по GPS транспортного средства 31. Данные транспортного средства также могут включать в себя, но не в виде ограничения, информацию о скорости транспортного средства, информацию о антиблокировочной тормозной системе и информацию о характеристиках двигателя. В ответ на данные транспортного средства, VCS 1 может принимать номинальную скорость для участка 910 дороги. VCS может сравнивать текущие данные транспортного средства с принятыми данными номинальной скорости для участка дороги на этапе 912.
[0070] Например, VCS 1 может вычислять показатель плавности для участка дороги на основании данных транспортного средства и принятого номинального значения. VCS 1 может сравнивать показатель плавности с предыдущими данными участка дороги, принятого с данными номинальной скорости. Как изложено выше, система 61 характеристик водителя может предусматривать вычисления показателя плавности и определять статистическое сравнение участка дороги на основании данных транспортного средства. В еще одном примере, способ вычисления показателя плавности может выполняться на VCS 1, в системе 61 характеристик водителя и/или их комбинации.
[0071] На этапе 914, VCS 1 может выводить обратную связь характеристик водителя на основании показателя плавности пройденного участка дороги. Если VCS 1 выполнена с возможностью выводить характеристики водителя по участку дороги, VCS 1 может определять, основана ли задержка для отображения выходных данных на заданном значении, на этапе 916.
[0072] Например, VCS может быть выполнена с возможность задерживать вывод на основании заданного значения, условия, параметра, флажкового признака, индикатора состояния, и т.д. Заданное значение может быть основано на скорости транспортного средства, рабочей нагрузке водителя и/или их комбинации. В еще одном примере, заданное значение может быть установлено для отображения выходного значения характеристик водителя, когда транспортное средство находится в положении передачи PARK.
[0073] На этапе 918, VCS 1 может проверять, что удовлетворено заданное значение, перед передачей характеристик водителя на устройство вывода. Если VCS 1 не требует заданного значения для задержки вывода, или заданное значение удовлетворено, VCS 1 может отображать рабочие характеристики участка дороги на этапе 920. Например, VCS 1 может выводить характеристики водителя на устройство 4 отображения. В еще одном примере VCS 1 может передавать характеристики водителя на спаренное нестационарное устройство 53, так чтобы водитель мог просматривать его/ее характеристики, как только завершена поездка.
[0074] На этапе 922, VCS 1 может определять, прибыл ли водитель в пункт назначения. Например, VCS 1 может принимать информацию о пункте назначения из системы навигации. В еще одном примере, VCS 1 может определять, водитель прибыл в пункт назначение на основании запроса выключения зажигания или подобного признака. Если водитель не прибыл в пункт назначения, VCS 1 может продолжать вычислять характеристики водителя на этапах 908-922.
[0075] На этапе 924, VCS 1 может определять и отображать общие характеристики для поездки на основании прибытия в пункт назначения. Например, VCS 1 может принимать статистическое сравнение для всей поездки из системы 61 характеристик водителя через канал связи. Статистическое сравнение для всей поездки может давать водителю транспортного средства наглядное сравнение показателя плавности по сравнению с другими, кто проехал по одному или более участков дороги в поездке. Статистическое сравнение для всей поездки может отображаться на пользовательском интерфейсе VCS 1, пользовательском интерфейсе нестационарного устройства и/или их комбинации. В ответ на событие выключения зажигания или подобный признак, данные могут сохраняться в локальной памяти или передаваться на нестационарное устройство. VCS 1 может начинать завершение работы перед выключением питания способа характеристик водителя на основании события выключения зажигания на этапе 926.
[0076] Несмотря на то, что примерные варианты осуществления описаны выше, не предполагается, что эти варианты осуществления описывают все возможные формы, охваченные формулой изобретения. Словесные формулировки, используемые в описании изобретения, предпочтительнее являются словесными формулировками описания, нежели ограничением, и понятно, что различные изменения могут быть произведены, не выходя из сущности и объема раскрытия. Как описано ранее, признаки различных вариантов осуществления могут комбинироваться для формирования дополнительных вариантов осуществления изобретения, которые могут не быть описаны или проиллюстрированы в прямой форме. Несмотря на то, что различные варианты осуществления могли бы быть описаны в качестве обеспечивающих преимущества или являющихся предпочтительными над другими вариантами осуществления или реализациями предшествующего уровня техники, что касается одной или более требуемых характеристик, рядовые специалисты в данной области техники осознают, что один или более признаков или характеристик могут быть скомпрометированы для достижения требуемых общих свойств системы, которые зависят от конкретных применения и реализации. Эти свойства могут включать в себя, но не в качестве ограничения: себестоимость, прочность, надежность, затраты в течение жизненного цикла, пригодность для продажи, внешний вид, упаковку, габариты, ремонтопригодность, вес, технологичность, легкость сборки, и т.д. По существу, варианты осуществления, описанные в виде менее желательных, чем другие варианты осуществления, или реализации уровня техники по отношению к одной или более характеристик, не выходят за пределы объема изобретения и могут быть полезными для конкретных применений.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ И СИСТЕМА ДЛЯ ОПТИМИЗАЦИИ ЭНЕРГОПОТРЕБЛЕНИЯ В ТРАНСПОРТНОМ СРЕДСТВЕ | 2014 |
|
RU2640919C2 |
| ЦИФРОВОЙ СОВЕТЧИК ДЛЯ ВОДИТЕЛЕЙ | 2024 |
|
RU2831868C1 |
| СИСТЕМА И СПОСОБ ОПТИМИЗАЦИИ РАБОТЫ САМОСВАЛА С ПОМОЩЬЮ ЦИФРОВОГО СОВЕТЧИКА ВОДИТЕЛЮ | 2021 |
|
RU2774512C1 |
| СПОСОБ УПРАВЛЕНИЯ ВОЖДЕНИЕМ И УСТРОЙСТВО УПРАВЛЕНИЯ ВОЖДЕНИЕМ | 2016 |
|
RU2699205C1 |
| ПРОГРАММНО-АППАРАТНЫЙ КОМПЛЕКС, СОБИРАЮЩИЙ ИНФОРМАЦИЮ ОБ ЭКСПЛУАТАЦИИ АВТОМОБИЛЯ И РАССЧИТЫВАЮЩИЙ ПОКАЗАТЕЛЬ БЕЗОПАСНОСТИ ВОЖДЕНИЯ | 2022 |
|
RU2790883C1 |
| СПОСОБ И СИСТЕМА АВТОМАТИЗИРОВАННОГО ПОСТРОЕНИЯ МАРШРУТА НА ОСНОВАНИИ ТЕЛЕМАТИЧЕСКОГО СКОРИНГА УПРАВЛЕНИЯ ТРАНСПОРТНЫМ СРЕДСТВОМ | 2023 |
|
RU2814789C1 |
| ОЦЕНКА ВНИМАНИЯ ВОДИТЕЛЯ | 2016 |
|
RU2715250C2 |
| ТРАНСПОРТНОЕ СРЕДСТВО С ГИПЕРЛАПС-ВИДЕО И СОЦИАЛЬНЫЕ СЕТИ | 2016 |
|
RU2725843C2 |
| СИСТЕМА И СПОСОБ ОЦЕНКИ ПОВЕДЕНИЯ ВОДИТЕЛЯ | 2020 |
|
RU2760043C1 |
| СИСТЕМА ДЛЯ ОПИСАНИЯ СТИЛЯ ВОЖДЕНИЯ У ВОДИТЕЛЕЙ ТРАНСПОРТНЫХ СРЕДСТВ | 2014 |
|
RU2594046C2 |

Изобретение относится к информационным системам транспортного средства. Транспортное средство содержит компьютер транспортного средства. Компьютер транспортного средства запрограммирован с возможностью хранения данных скорости транспортного средства в памяти и выведения оценки плавности транспортного средства на устройстве отображения, сформированной на основании интегрирования разности между скоростью транспортного средства и номинальным профилем скорости множества транспортных средств, которые проехали по участку дороги, поделенному на расстояния участка дороги. Достигается повышение безопасности транспортного средства. 3 н. и 17 з.п. ф-лы, 10 ил.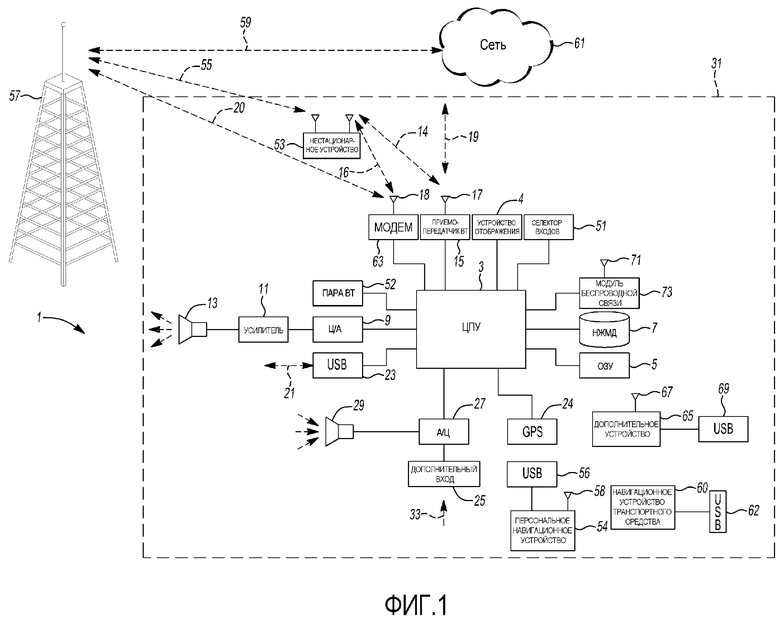
1. Транспортное средство, содержащее:
компьютер транспортного средства, запрограммированный с возможностью:
хранения данных скорости транспортного средства в памяти и
выведения оценки плавности транспортного средства на устройстве отображения, сформированной на основании интегрирования разности между скоростью транспортного средства, связанного с участком дороги, и номинальным профилем скорости множества транспортных средств, которые проехали по участку дороги, поделенному на расстояния участка дороги.
2. Транспортное средство по п. 1, в котором оценка плавности формируется в удаленной сети, содержащей по меньшей мере один компьютер на связи с компьютером транспортного средства.
3. Транспортное средство по п. 1, в котором компьютер выполнен с возможностью связи с беспроводным приемопередатчиком для обеспечения канала связи с удаленной сетью, содержащей по меньшей мере один компьютер, запрограммированный с возможностью вычисления номинального профиля скорости участка дороги.
4. Транспортное средство по п. 3, в котором по меньшей мере один компьютер в удаленной сети дополнительно запрограммирован с возможностью вычисления среднеквадратического отклонения для номинального профиля скорости и сравнения оценки плавности со среднеквадратическим отклонением.
5. Транспортное средство по п. 1, в котором компьютер дополнительно запрограммирован с возможностью формирования поездки на основании одного или более участков дороги, вычисления оценки плавности поездки на основании оценки плавности для каждого из одного или более участков дороги, при этом вывод оценки плавности на устройстве отображения происходит в ответ на прибытие в пункт назначения для поездки.
6. Транспортное средство по п. 5, в котором пункт назначения основан на по меньшей мере одном из информации системы навигации, запроса выключения зажигания и сигнала, указывающего трансмиссию в положении PARK.
7. Транспортное средство по п. 1, в котором вывод оценки плавности задерживается на основании заданного значения, сравниваемого с по меньшей мере одним из скорости транспортного средства и рабочей нагрузки водителя.
8. Транспортное средство по п. 1, в котором устройством отображения является пользовательский интерфейс нестационарного устройства, который находится на связи с компьютером через беспроводной приемопередатчик.
9. Способ оценивания водителя, включающий в себя этапы, на которых:
сохраняют в базе данных данные скорости вождения по участку дороги для множества транспортных средств;
вычисляют номинальный профиль скорости для участка дороги с использованием данных скорости вождения; и
отображают оценку плавности водителя на основании интегрирования разности между скоростью транспортного средства и номинальным профилем скорости, связанным с участком дороги, поделенным на расстояния участка дороги.
10. Способ по п. 9, дополнительно включающий в себя этап, на котором суммируют оценку плавности для множества участков дороги для формирования оценки плавности, связанной с поездкой.
11. Способ по п. 9, дополнительно включающий в себя этап, на котором отображают оценку плавности для выбираемого пользователем предыдущего расстояния вождения.
12. Способ по п. 9, дополнительно включающий в себя этап, на котором отображают мгновенную оценку плавности для текущего участка вождения.
13. Способ по п. 9, дополнительно включающий в себя этап, на котором выдают предупредительный сигнал водителю в ответ на отклонение от номинального профиля скорости, превышающее заданное пороговое значение.
14. Способ по п. 13, в котором предупредительный сигнал содержит по меньшей мере одно из слышимого сигнала, светового сигнала, вибрации рулевого колеса и вибрации педали.
15. Способ по п. 9, дополнительно включающий в себя этап, на котором выдают сообщение рекомендации водителю на основании улучшения оценки плавности.
16. Способ по п. 9, дополнительно включающий в себя этап, на котором передают оценку плавности на внешний компьютер.
17. Сервер характеристик водителя, содержащий:
процессор, выполненный с возможностью связи с вычислительной системой транспортного средства (VCS), запрограммированный с возможностью:
определения участка дороги в ответ на данные транспортного средства, включающие в себя местоположение и скорость транспортного средства, принятые из VCS,
вычисления номинальной скорости для участка дороги на основании множества транспортных средств, которые проехали по участку дороги;
вычисления оценки плавности на основании интегрирования разности между номинальной скоростью и скоростью транспортного средства для участка дороги; и
передачи оценки плавности в VCS.
18. Сервер по п. 17, в котором процессор дополнительно запрограммирован с возможностью формирования поездки на основании одного или более участков дороги, вычисления оценки плавности поездки на основании оценки плавности для каждого из участков дороги для одного или более участков дороги и выведения оценки плавности поездки в ответ на прибытие в пункт назначения для поездки.
19. Сервер по п. 17, в котором процессор дополнительно запрограммирован с возможностью вычисления среднеквадратического отклонения для номинальной скорости и сравнения среднеквадратического отклонения для номинальной скорости со среднеквадратическим отклонением оценки плавности.
20. Сервер по п. 17, в котором оценка плавности выполнена с возможностью выведения в виде графика сравнения оценки плавности с номинальной скоростью участка дороги.
| US 6850823 B2, 01.02.2005 | |||
| US 6922147 B1, 26.07.2005 | |||
| ГИБРИДНОЕ ТРАНСПОРТНОЕ СРЕДСТВО, СПОСОБ УПРАВЛЕНИЯ ГИБРИДНЫМ ТРАНСПОРТНЫМ СРЕДСТВОМ И УСТРОЙСТВО ВЫДАЧИ МОЩНОСТИ | 2005 |
|
RU2334624C2 |

