Предлагаемое изобретение предназначено для контроля целостности лопастей несущих винтов вертолета с соосной схемой их расположения посредством контроля изменений угловых расстояний между соседними лопастями и определения параметров колебательного движения лопастей.
Известна полезная модель - система измерения сближения лопастей соосного вертолета (Якеменко Г.В., Селеменев С.В., и др., Система измерения сближения лопастей соосного вертолета. Свидетельство на полезную модель №57241, опубликован 10.10.2006, бюл. №28). Для реализации этой полезной модели используют встроенные в законцовки нижней и верхней лопасти лазерные модули, излучение которых принимается и обрабатывается при помощи светочувствительной матрицы, которая расположена на неподвижной части вертолета, результаты измерений позволяют судить о возникновении и развитии несоконусности и дефектов несущих винтов вертолета.
Недостатками этой полезной модели являются: внесение в конструкцию лопастей дополнительных элементов, изменяющих прочностные свойства лопастей и низкая помехозащищенность оптического измерительного канала.
Также известна система обеспечения безопасности вертолета в критических режимах пилотирования (Система обеспечения безопасности вертолета в критических режимах пилотирования. Патент №2445234, опубликован 20.03.2012, бюл. №8). Для реализации системы обеспечения безопасности вертолета в соответствии с указанным патентом используют приемники и передатчики электромагнитного сигнала, встроенные в лопасти нижнего и верхнего винтов вертолета, а также в элементы конструкции вертолета. Деформацию элементов конструкции вертолета определяют по амплитуде сигнала при этом учитывают скорость движения вертолета, нагрузки и положение органов управления вертолета.
Недостатками этого устройства являются: внесение в конструкцию лопастей дополнительных элементов, изменяющих прочностные свойства лопастей и низкая помехозащищенность амплитудного метода измерения деформации конструкций вертолета. Также к недостаткам относятся большое количество приемников и передатчиков с уникальными сигналами и независимой связью, что существенно усложняет систему и снижает ее надежность, а также существенно усложняет ее производство и обслуживание.
Наиболее близким по технической сущности к предлагаемому изобретению является способ контроля целостности лопастей несущего винта вертолета и устройство для его осуществления (Данилин А.И., Жуков С.В. и др., Способ контроля целостности лопастей несущего винта вертолета и устройство для его осуществления. Патент №2593652, опубликован 10.08.2016, бюл. №22). Контроль целостности лопастей несущего винта вертолета достигается за счет контроля межлопастного углового расстояния и амплитуды маховых колебаний лопастей посредством определения информационных параметров, таких как период, длительность и амплитуда импульсов зондирующего излучения сверхвысокой частоты (СВЧ), отраженных от лопастей вертолета.
Известный способ осуществляется устройством контроля целостности лопастей несущего винта вертолета (Данилин А.И., Жуков С.В. и др., Способ контроля целостности лопастей несущего винта вертолета и устройство для его осуществления. Патент №2593652, опубликован 10.08.2016, бюл. №22), содержащим генератор сигнала сверхвысокой частоты, приемную и передающую антенно-фидерные системы, усилитель, бортовую электронно-вычислительную машину, счетчик определения периода вращения ротора несущего винта вертолета и счетчик определения длительности межлопастных временных интервалов, оборотный датчик, электронный ключ, генератор тактовых импульсов, формирователь опорного напряжения, цифро-аналоговый преобразователь и компараторы.
Недостатками этого способа и устройства его реализующего являются недостаточная точность и достоверность измерений, обусловленные использованием амплитудного метода измерения расстояния до лопасти, подверженного влиянию помех от посторонних источников излучения и, кроме этого, отсутствие информации о фазовом сдвиге между воздушными винтами соосных схем может привести к перекрытию лопастей верхнего несущего винта (ВНВ) лопастями нижнего несущего винта (ННВ) в зоне видимости чувствительных элементов устройства, кроме этого существует неоднозначность определения параметров скручивания лопасти из-за отсутствия учета углов установки лопастей автоматом перекоса и геометрической крутки лопастей.
В основу изобретения поставлены задачи расширения функциональных возможностей способа и увеличение точности измерения параметров колебательных перемещений лопастей, определяющих их целостность. Расширение функциональных возможностей достигается посредством увеличения количества измеряемых информационных параметров характеризующих рабочее состояние лопастей, а также за счет распространения возможностей способа и устройства его реализующего на соосные схемы воздушных винтов. Увеличение точности измерения колебательных параметров перемещения лопастей вертолета в предлагаемом способе и устройстве его реализующем, достигается за счет использования фазового метода определения амплитуды махового колебания лопасти и использования информации об угле установки лопастей несущих винтов, получаемой со стационарных штатных датчиков. Внедрение системы контроля состояния вращающихся узлов вертолета с учетом информации со штатных датчиков позволяет исключить неоднозначность определения скручивания лопастей в рабочем эксплуатационном режиме. Кроме этого использование зондирующего излучения СВЧ диапазона позволяет использовать устройство в любое время суток вне зависимости от погодных условий и изменения интенсивности потока солнечного излучения.
Для достижения поставленной цели в способе контроля целостности лопастей несущих винтов вертолета в соосной схеме их расположения на ротор нижнего несущего винта вертолета устанавливают возбудитель оборотной метки, на неподвижной части корпуса вертолета напротив траектории движения оборотной метки устанавливают первый неподвижный бесконтактный оборотный датчик, регистрируют электрические импульсы, полученные в результате взаимодействия возбудителя оборотной метки и первого оборотного датчика, из аналоговых электрических импульсов первого оборотного датчика формируют оборотные прямоугольные импульсы, измеряют временные интервалы между оборотными прямоугольными импульсами, получают информацию о периоде вращения ротора нижнего несущего винта вертолета, устанавливают на неподвижной части корпуса вертолета излучающую антенну с диаграммой направленности, ширина которой сравнима с угловой видимостью ширины лопасти и исключающей возможность одновременного облучения двух соседних лопастей, в непосредственной близости от излучающей антенны устанавливают приемную антенну так, чтобы ширина диаграммы направленности антенны обеспечивала уверенный прием отраженного поочередно от каждой лопасти зондирующего сигнала, антенны располагают таким образом, чтобы конструктивные элементы корпуса вертолета не попадали в зону их диаграмм направленностей, направляют зондирующее излучение посредством излучающей антенны в сторону контролируемых лопастей нижнего несущего винта, частично принимают отраженное от лопастей нижнего несущего винта зондирующее излучение приемной антенной, детектируют принятый сигнал и усиливают его огибающую, на основе огибающей формируют лопастные прямоугольные импульсы, определяют временные интервалы между лопастными прямоугольными импульсами, идентифицируют номера лопастей нижнего несущего винта вертолета посредством сравнения временного положения импульсов от оборотного датчика и лопастных прямоугольных импульсов, полученных после обработки потока, отраженного и принятого от лопастей вертолета, определяют относительные значения временных интервалов для каждого межлопастного интервала путем вычисления отношения между полученным текущим межлопастным временным интервалом и периодом вращения винта вертолета, сравнивают полученные относительные временные интервалы и амплитуды отраженных от лопастей сигналов с эталонными относительными временными интервалами и амплитудными величинами, записанными в памяти бортовой электронно-вычислительной машины, согласно изобретению, на ротор верхнего несущего винта вертолета устанавливают второй возбудитель оборотной метки, на неподвижной части корпуса вертолета напротив траектории движения второго возбудителя оборотной метки устанавливают неподвижный второй бесконтактный оборотный датчик, регистрируют электрические импульсы, полученные в результате взаимодействия возбудителя оборотной метки со вторым оборотным датчиком, из электрических импульсов, поступающих со второго оборотного датчика формируют оборотные прямоугольные импульсы верхнего несущего винта, измеряют временные интервалы между оборотными прямоугольными импульсами, получают информацию о периоде вращения ротора верхнего несущего винта вертолета, излучающую и приемную антенны устанавливают на неподвижной части корпуса вертолета таким образом, чтобы максимумы основных лепестков их диаграмм направленности не совпадали с точкой встречи лопастей верхнего и нижнего несущих винтов вертолета, формируют генератором масштабной частоты в диапазоне высоких частот гармонический сигнал с рассчитанной масштабной частотой, модулируют сигнал сверхвысокой частоты сигналом высокой частоты при помощи модулятора, формируя таким образом зондирующее излучение, направляют зондирующее излучение посредством излучающей антенны в сторону контролируемых лопастей верхнего несущего винта, частично принимают отраженное от лопастей верхнего несущего винта зондирующее излучение приемной антенной, выделяют отраженное от лопастей и принятое приемной антенной излучение посредством блока фильтров, сравнивают фазы сгенерированного и принятого масштабных сигналов при помощи фазометра и генерируют сигнал разности фаз в виде прямоугольного импульса, измеряют его длительность, по длительности сигнала разности фаз судят об амплитуде махового колебания, идентифицируют номера лопастей верхнего несущего винта вертолета посредством сравнения временного положения импульсов от оборотного датчика верхнего несущего винта и лопастных прямоугольных импульсов, соответствующих верхнему несущему винту вертолета, измеряют длительность лопастных прямоугольных импульсов, по длительности лопастных прямоугольных импульсов определяют угол установки лопасти, находящейся непосредственно в зоне действия диаграммы направленности приемной антенны, оцифровывают посредством блока аналого-цифровых преобразователей амплитуды сигналов с датчиков дифференциального шага винта, общего шага винта, циклического продольного и поперечного шага винта и по амплитуде сигналов с этих датчиков определяют мгновенный угол установки лопасти, сравнивают мгновенный угол установки и угол установки лопасти над приемной антенной и определяют угол скручивания лопасти, сравнивают измеренный угол скручивания и длительность сигнала разности фаз с эталонными значениями, записанными в памяти бортовой электронно-вычислительной машины, эталонные значения определяются при работе с заведомо исправными лопастями, получаемыми, например, за сто полных оборотов несущих винтов вертолета на всех рабочих режимах при максимальном и минимальном возможных углах установки лопастей и максимальном приближении и удалении лопастей от апертуры приемной антенны, при этом определяются минимальные и максимальные возможные длительности импульсов для каждого межлопастного интервала, углы скручивания для каждой лопасти и сигналов разностей фаз, при обнаружении отклонения текущих значений измеренных временных интервалов от имеющихся эталонных значений формируется сигнал о неисправности конкретной лопасти или ее крепления.
Для реализации способа в известное устройство, содержащее детектор, первый компаратор, второй компаратор, аналогово-цифровой преобразователь, генератор сигнала сверхвысокой частоты, приемную и передающую антенно-фидерные системы, первый усилитель, бортовую электронно-вычислительную машину, счетчик определения межлопастных временных интервалов, первый оборотный датчик, генератор тактовых импульсов, первый счетчик определения частоты вращения ротора нижнего несущего винта вертолета, согласно изобретению дополнительно введены, генератор масштабной частоты, модулятор, фазометр, блок фильтров, второй усилитель, счетчик определения длительности отраженного сигнала, счетчик определения длительности сигнала разности фаз, второй счетчик определения частоты вращения ротора верхнего несущего винта вертолета, второй оборотный датчик, датчик определения установки дифференциального шага винта, датчик определения установки общего шага винта, датчик определения установки циклического продольного шага винта, датчик определения установки циклического поперечного шага винта, третий компаратор, соединенные между собой следующим образом: выход генератора сверхвысокой частоты подключен к первому входу модулятора, выход генератора масштабной частоты, соединен со вторым входом модулятора и с первым входом фазометра, выход модулятора соединен с входом излучающей антенно-фидерной системы, выход приемной антенно-фидерной системы, подключен к входу блока фильтров, выход блока фильтров подключен к входу детектора, выход которого соединен с входом первого усилителя и подключен к входу второго усилителя, выход первого усилителя подключен ко второму входу фазометра, выход второго усилителя соединен с входом первого компаратора, выход фазометра подключен к первому входу счетчика определения длительности сигнала разности фаз, выход первого компаратора соединен с первым входом счетчика определения длительности отраженного сигнала и с первым входом счетчика определения межлопастных временных интервалов, генератор тактовых импульсов, выход которого подключен к вторым входам счетчиков определения длительности сигнала разности фаз, определения длительности отраженного сигнала и определения межлопастных временных интервалов и к вторым входам счетчиков определения частоты вращения роторов нижнего и верхнего несущих винтов вертолета, выходные разряды счетчика определения длительности сигнала разности фаз подключены к первой части разрядов входного интерфейса бортовой электронно-вычислительной машины, выходные разряды счетчика определения длительности отраженного сигнала соединены со второй частью разрядов входного интерфейса бортовой электронно-вычислительной машины, выходные разряды счетчика определения межлопастных временных интервалов подключены к третьей части разрядов входного интерфейса бортовой электронно-вычислительной машины, первый оборотный датчик соединен с входом второго компаратора, второй оборотный датчик подключен к входу третьего компаратора, выход второго компаратора соединен с первым входом счетчика определения частоты вращения ротора нижнего несущего винта вертолета, выход третьего компаратора подключен к первому входу счетчика определения частоты вращения ротора верхнего несущего винта вертолета, выходные разряды счетчика определения частоты вращения ротора нижнего несущего винта вертолета подключены к четвертой части разрядов входного интерфейса бортовой электронно-вычислительной машины, выходные разряды счетчика определения частоты вращения ротора верхнего несущего винта вертолета, соединены с пятой частью разрядов входного интерфейса бортовой электронно-вычислительной машины, выход датчика определения установки дифференциального шага винта подключен к первому информационному входу блока аналого-цифровых преобразователей, выход датчика определения установки общего шага винта соединен со вторым информационным входом блока аналого-цифровых преобразователей, выход датчика определения установки циклического продольного шага винта подключен к третьему информационному входу блока аналого-цифровых преобразователей, выход датчика определения установки циклического поперечного шага винта соединен с четвертым информационным входом блока аналого-цифровых преобразователей, выходные разряды блока аналого-цифровых преобразователей подключены к шестой части разрядов входного интерфейса бортовой электронно-вычислительной машины; бортовая электронно-вычислительная машина является выходным блоком, формирующим и отображающим выходные сигналы устройства.
Предлагаемое техническое решение обладает новизной, т.к. авторам не известны признаки, фигурирующие в предлагаемом изобретении в качестве отличительных.
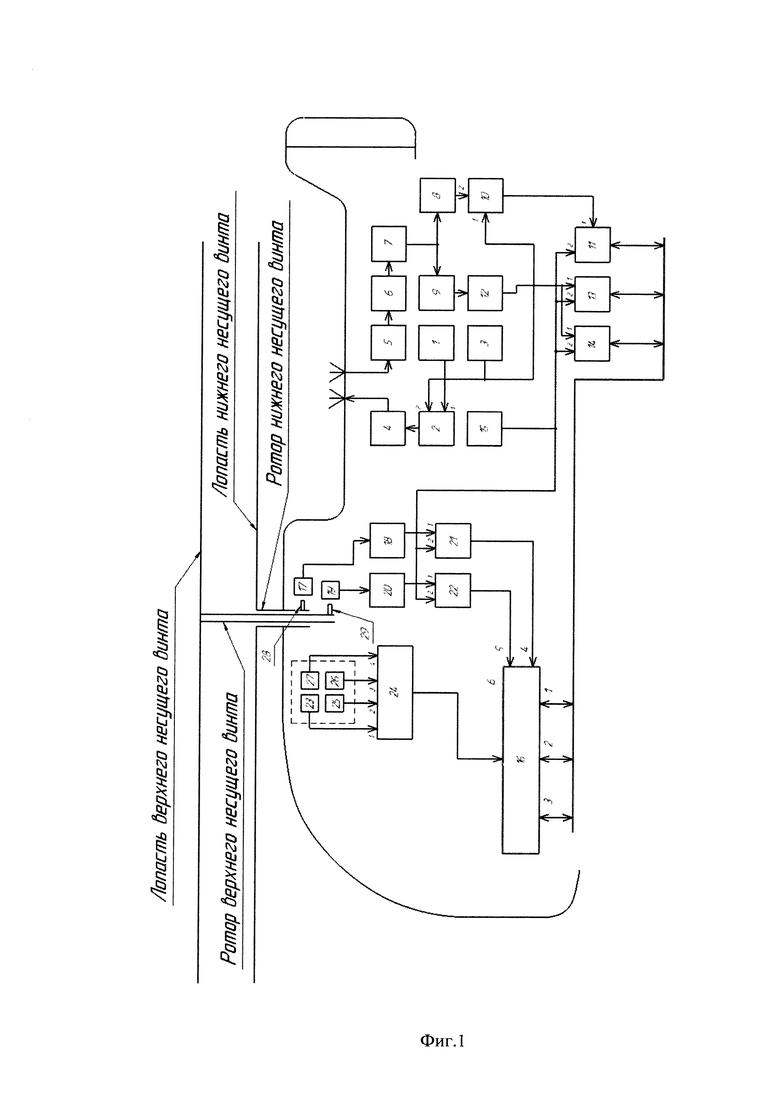
Сущность изобретения поясняется чертежами, где на фиг. 1 представлена структурная схема устройства, реализующего предложенный способ;
на фиг. 2 приведены временные эпюры, поясняющие работу устройства;
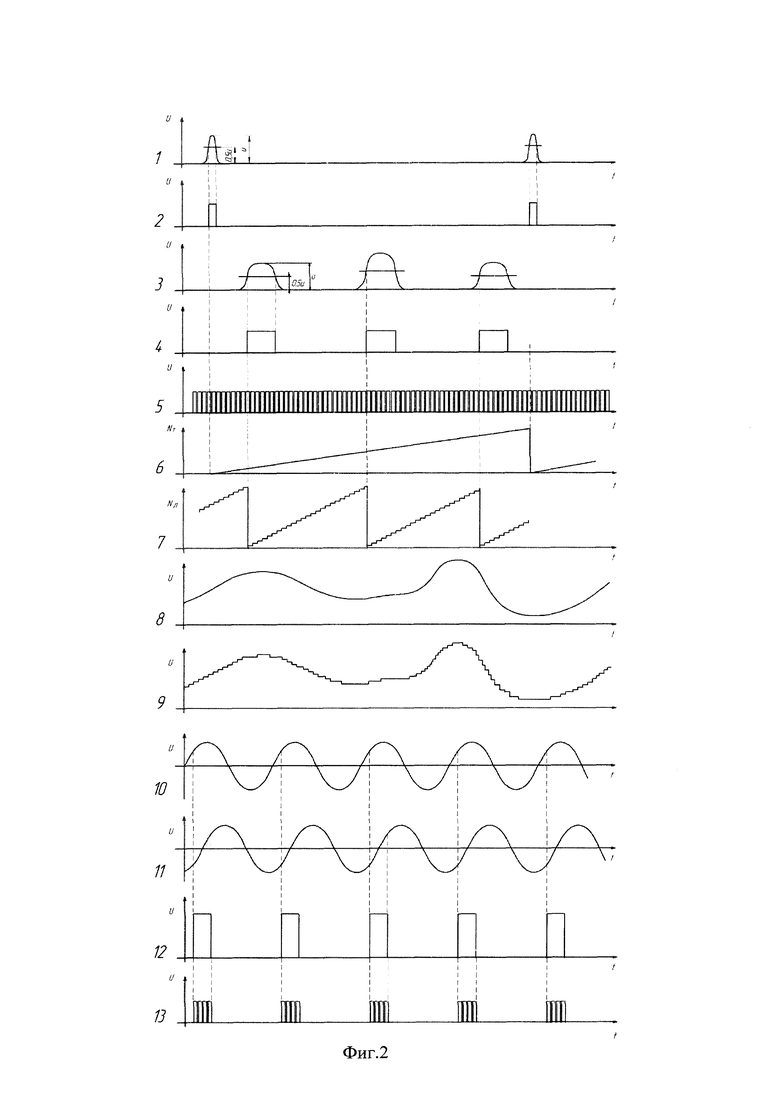
на фиг. 3 приведена схема расположения основных блоков устройства;
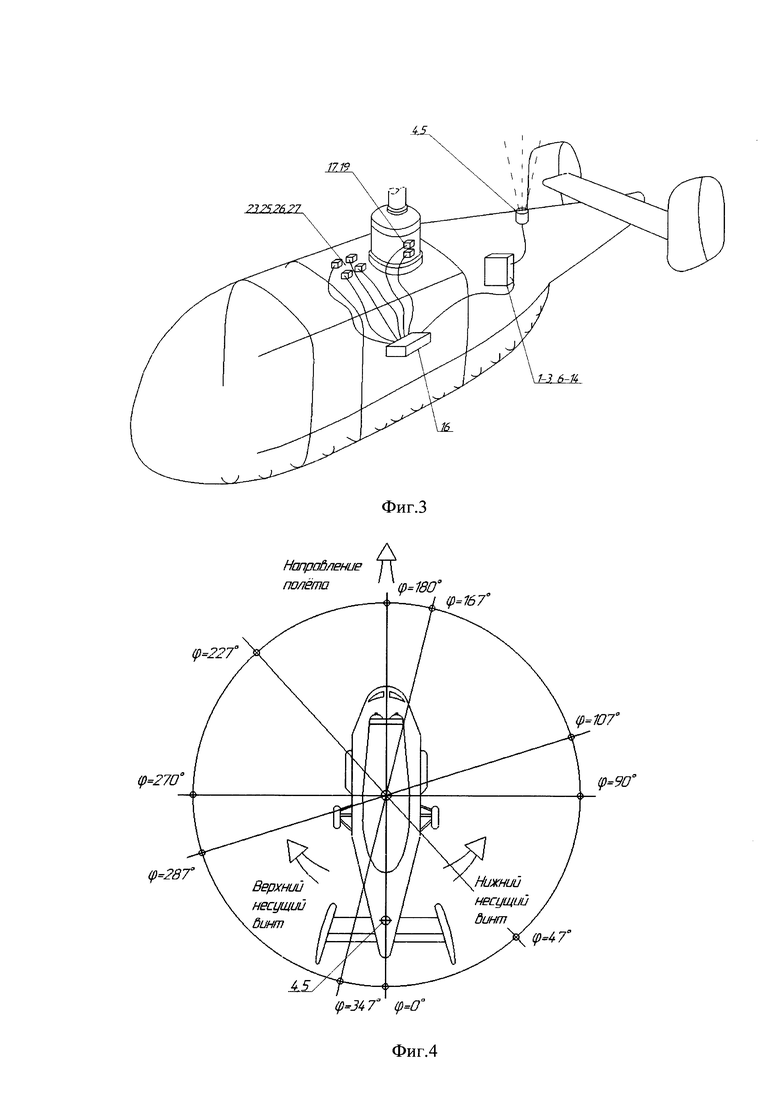
на фиг. 4 приведено расположение приемо-передающих антенн относительно возможных азимутальных углов встречи лопастей верхнего и нижнего несущих винтов;
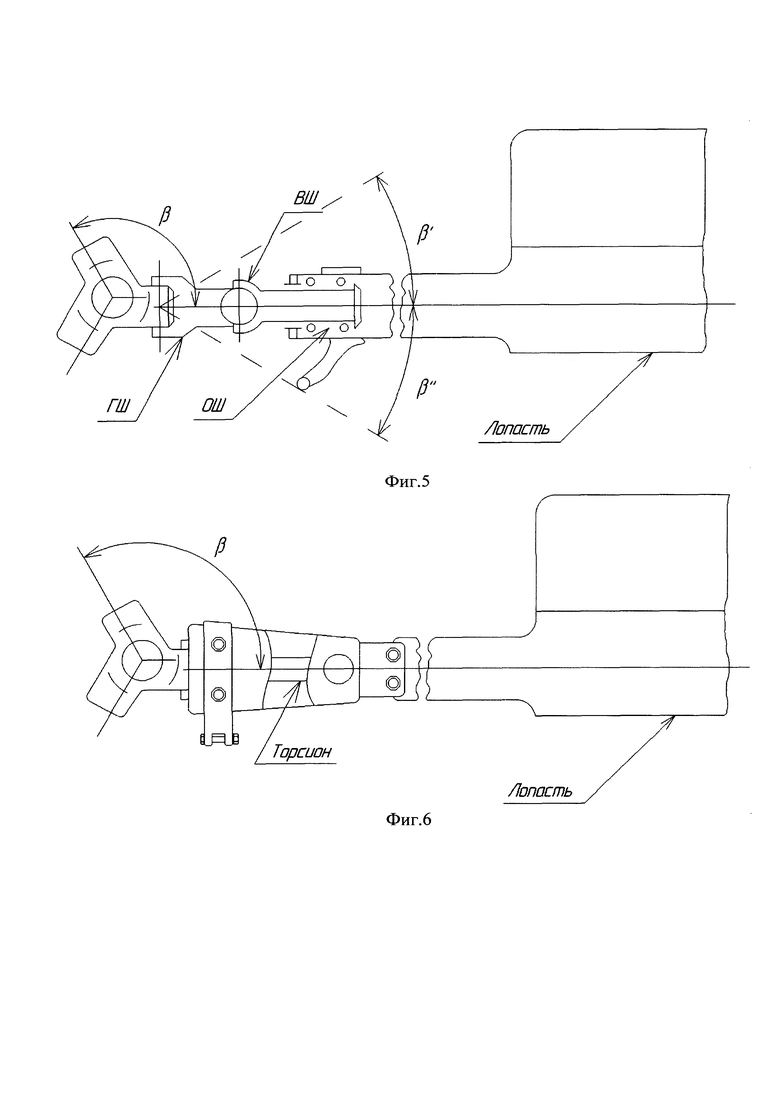
на фиг. 5 приведена шарнирная схема крепления лопасти и межлопастное угловое расстояние с указанием углов, на которые могут отклоняться лопасти относительно исходного состояния в горизонтальной плоскости;
на фиг. 6 приведена упругая схема крепления лопасти и межлопастное угловое расстояние;
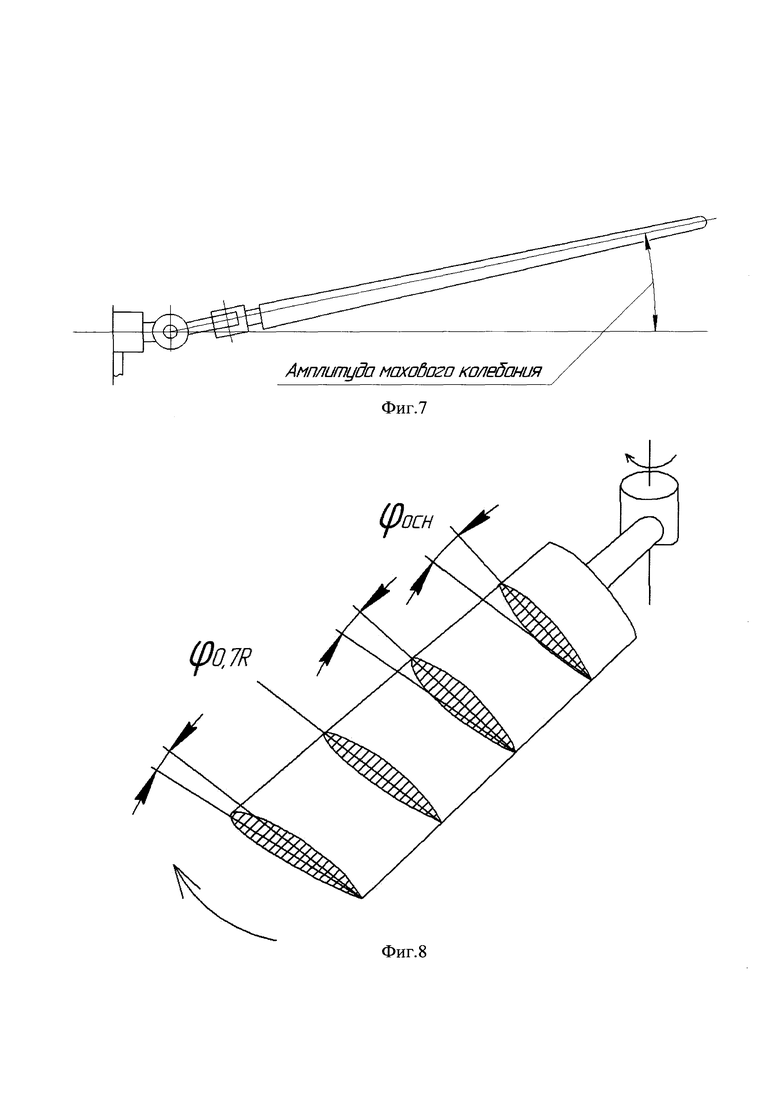
на фиг. 7 показано маховое перемещение (колебание) лопасти;
на фиг. 8 приведен угол установки лопасти в нескольких ее сечениях.
Контроль целостности лопастей вращающегося несущего винта соосной схемы по предложенному способу осуществляется следующим образом.
На роторах верхнего и нижнего несущих винтов вертолета устанавливают возбудители оборотной метки, например, штыри 28, 29. На неподвижной части корпуса вертолета напротив траектории движения оборотных меток (ОМ) устанавливают бесконтактные оборотные датчики 17, 19 (ОД) (Фиг. 1), например, вихретоковые и регистрируют их выходные электрические импульсы (Фиг. 2, эпюра 1, импульсы с первого оборотного датчика), полученные в результате взаимодействия возбудителя ОМ с ОД. Формируют из электрических импульсов ОД, оборотные прямоугольные импульсы ННВ и ВНВ (для примера на Фиг. 2, эпюра 2 показаны импульсы ННВ), измеряют временные интервалы между импульсами ОД, например, по переднему фронту оборотных прямоугольных импульсов (Фиг. 2 эпюра 6), получают информацию о периоде вращения роторов ННВ и ВНВ вертолета. Размещают на неподвижной части корпуса вертолета, например, на хвостовой части фюзеляжа вертолета (Фиг. 3), излучающую антенну 4, например, на основе рупорной антенны (Драбкин А.Л., Зузенко В.Л., Кислов А.Г. Антенно-фидерные устройства. М.: Советское Радио, 1974. 266-286 с.), с относительно узкой диаграммой направленности, ширина которой исключает возможность одновременного облучения двух соседних лопастей. В непосредственной близости от излучающей антенны устанавливают приемную антенну 5 таким образом, чтобы ширина диаграммы направленности приемной антенны позволяла обеспечивать уверенный прием, отраженного поочередно от каждой лопасти излучения при любом ее деформационном состоянии. Обе антенны располагаются на корпусе вертолета в зоне «характерного» сечения лопасти, которое находится на расстоянии 0,7R от центра втулки НВВ (R - длина лопасти, Фиг. 8), так как в этом месте наблюдаются аэродинамические характеристики близкие к средним для всей лопасти (Ромасевич В.Ф. Аэродинамика и динамика полета вертолетов. М.:ВИ МО СССР, 1982. 102-103 с.). Кроме этого, антенны устанавливаются таким образом, чтобы конструктивные элементы корпуса вертолета не попадали в зону действия их диаграмм направленностей.
Поскольку в соосной схеме расположения несущих винтов вертолета, в некоторые моменты времени лопасти ННВ и ВНВ перекрываются, то при установке антенн необходимо учитывать все возможные азимутальные углы встречи лопастей верхнего и нижнего несущих винтов, например, для вертолета Ка-32 азимутальные углы встречи показаны на Фиг. 4 (Володко A.M., Верхозин М.П., Горшков В.А. Вертолеты. Справочник по аэродинамике, динамике полета, конструкции, оборудованию и технической эксплуатации. М.: Военное издательство, 1992. 61-62 с.).
С помощью генератора масштабной частоты 3 генерируется масштабный сигнал высокой частоты (ВЧ), выступающий в роли модулирующего:
uBЧ=Acos((Ωt+ϕ0),
где А, Ω и ϕ0 - амплитуда, частота и начальная фаза масштабного сигнала, соответственно. Сигнал масштабной частоты uВЧ подается на модулятор 2, например, на основе p-i-n - диодов (Веселов Г.И., Егоров Е.Н. и др., Микроэлектронные устройства СВЧ. М.: Высшая школа, 1988. 78-87 с.) и изменяет амплитуду СВЧ колебаний, при этом формируется модулированное по амплитуде зондирующее СВЧ излучение:
uИЗЛ=UИЗЛ[1+Mcos(Ωt+ϕ0)]cos(ω0t+ϕ'0),
где М - коэффициент амплитудной модуляции; UИЗЛ, ω0 и ϕ'0 - амплитуда, частота и начальная фаза несущего СВЧ сигнала, соответственно. Далее направляют модулированный сигнал посредством излучающей антенно-фидерной системой 4 в сторону траектории движения контролируемых лопастей. Отраженный от лопастей сигнал частично принимается приемной антенно-фидерной системой 5 (АФС):

где Uпp - амплитуда принятого несущего сигнала; ϕотр - фазовый сдвиг, вызванный разностью хода зондирующего сигнала от лопасти до АФС; ϕизм - сдвиг фазы обусловленный задержкой в цепях измерителя; tr - время задержки сигнала при распространении сигнала до лопасти и обратно; ωД(t) - доплеровское приращение частоты; tн,tк - время начала и конца наблюдения лопасти; ϕ' - приращение фазы несущего сигнала.
Принятый сигнал обрабатывают при помощи блока 6 фильтров и детектируют. Усиливают полученную огибающую сигнала (например, показанные на Фиг. 2, эпюре 3 для ННВ), затем формируют на ее основе лопастные прямоугольные импульсы (например, показанные на Фиг. 2, эпюре 4 для ННВ), измеряют межлопастные временные интервалы, например, по переднему фронту лопастного прямоугольного импульса (Фиг. 2 эпюра 7). Идентифицируют лопасти несущего винта вертолета посредством сравнения временного положения оборотных импульсов ННВ и ВНВ и лопастных прямоугольных импульсов (например, для ННВ Фиг. 2 эпюры 1-4). Находят относительные значения временных интервалов, соответствующих каждому межлопастному интервалу для ННВ и ВНВ путем вычисления отношения между полученным текущим межлопастным временным интервалом и периодом вращения соответствующего винта вертолета. Записывают измеренные значения в памяти БЭВМ.
Для измерения амплитуды маховых колебаний (Фиг. 7) лопастей используется фазовый метод. При этом определяется разность фаз между излученным (опорным) и принятым продетектированным (масштабным) сигналами, которая пропорциональна перемещениям лопасти при ее маховом движении (Белоцерковский Г.Б. Основы радиолокации и радиолокационные устройства. М.: Советское Радио, 1975. 79-81 с.) и определяется выражением:
где D - измеряемое расстояние; λm, Fm - длина волны и частота масштабного сигнала, соответственно; tr - время задержки сигнала (tr=2D/с). Для количественного определения разности фаз в фазометре 10 (Котлярский А.И., Миклашевский СП. и др. Промышленная электроника. М.: Недра, 1984. 266-267 с.) формируют импульс прямоугольной формы, длительность которого пропорциональна искомой разности фаз (Фиг. 2 эпюры 10-12).
Длина волны масштабного сигнала определяется и задается исходя из максимально возможного измеряемого расстояния до контролируемой лопасти, в соответствии с выражением (Белоцерковский Г.Б. Основы радиолокации и радиолокационные устройства. М.: Советское Радио, 1975. 79-81 с.):
где Dмax - максимально возможное расстояние от лопасти до антенны, выбранное с учетом возможного махового колебания лопасти вертолета; λm - длина волны масштабного сигнала.
Измеряют с помощью цифровых счетчиков 11 длительность импульсов разности фаз (Фиг. 2 эпюра 12, 13). Записывают коды измеренных значений в памяти бортовой электронно-вычислительной машины 16 (БЭВМ).
Получают тарированные характеристики при работе с заведомо исправными лопастями и автоматом перекоса, полученными, например, за сто полных оборотов ННВ и ВНВ вертолета при максимальном и минимальном возможных углах установки лопастей, максимальном приближении и удалении лопастей от хвостовой части фюзеляжа, при максимальном сближении лопастей верхнего и нижнего несущих винтов. Записывают полученные значения в памяти БЭВМ 16.
Измеряют амплитуду сигналов с датчиков определения установки дифференциального шага винта 23, определения установки общего шага винта 25, определения установки циклического продольного шага винта 26, определения установки циклического поперечного шага винта 27 (Фиг. 3) посредством оцифровки блоком аналогово-цифровых преобразователей 24 (АЦП) (Фиг. 2 эпюры 8, 9). Определяют угол установки лопасти, установленный автоматом перекоса ϕосн (Фиг. 8) непосредственно над АФС, путем сравнения измеренных значений амплитуд сигналов с датчиков определения угла установки шага винта с тарированными характеристиками, записанными в памяти БЭВМ 16. По результатам сравнения определяют угол установки лопасти (ϕосн) - Записывают полученные значения в памяти БЭВМ 16.
Измеряют длительность отраженного от лопасти сигнала при помощи счетчика определения длительности отраженного сигнала 13 (Фиг. 2 эпюра 4). По длительности лопастных импульсов измеряют угол установки лопасти непосредственно над антенной в «характерном» сечении лопасти ϕ0,7R (Фиг. 8). Корректируют измеренный угол по тарированной характеристике в зависимости от измеренного расстояния от антенны до лопасти. Записывают измеренные значения в памяти БЭВМ 16.
Измеряют угол скручивания ϕскр лопасти посредством вычисления разницы угла установки лопасти автоматом перекоса ϕосн (Фиг. 8) и углом установки лопасти непосредственно над антенной в характерном сечении ϕ0,7R (ϕскр=ϕ0,7R-ϕосн). Записывают измеренные значения в памяти БЭВМ 16.
Получают эталонные относительные временные интервалы и разности фаз посредством выделения максимальных и минимальных значений межлопастных временных интервалов, углов скручивания и разностей фаз, которые определяются при работе с заведомо исправными лопастями, полученными, например, за сто полных оборотов ННВ и ВНВ вертолета на всех рабочих режимах при максимальном и минимальном возможных углах установки лопастей, максимальном приближении и удалении лопастей от хвостовой части фюзеляжа, при максимальном сближении лопастей верхнего и нижнего несущих винтов. Находят минимально и максимально возможные значения временных интервалов для каждого межлопастного интервала (характеризующего угловое расстояние между соседними лопастями - β) с учетом возможных вариаций отработки демпферной системы шарнирного крепления (β' и β'') или торсионной систем крепления лопастей несущего винта вертолета (Фиг. 5, 6). Подсчитывают минимально и максимально возможные значения углов скручивания для каждой лопасти и длительностей отраженных сигналов. Определяют минимально и максимально возможные значения разности фаз для каждой лопасти. Записывают полученные значения в памяти БЭВМ 16.
Сравнивают после каждого оборота винта вертолета текущие и записанные в памяти БЭВМ 16 эталонные значения относительных временных интервалов, значения углов скручивания и длительностей сигнала разности фаз. Определяют выход текущих значений длительностей лопастных и межлопастных временных интервалов, значения углов скручивания и длительностей сигналов разности фаз за границы эталонных параметров. По отклонению текущих измеренных значений от эталонных параметров судят о целостности лопастей несущих винтов вертолета и их креплений.
Устройство контроля целостности лопастей несущего винта вертолета (фиг. 1) содержит генератор 1 СВЧ сигнала, выход которого подключен к первому входу модулятора 2, генератор 3 масштабной частоты, выход которого соединен с вторым входом модулятора 2, излучающую антенно-фидерную систему 4 (АФС), вход которой подключен к выходу модулятора 2, приемную АФС 5, выход которой соединен с входом блока фильтров 6, детектор 7, вход которого подключен к выходу блока фильтров, выход детектора соединен с входами первого усилителя 8 и второго усилителя 9, фазометр 10, к первому входу которого подключен выход генератор масштабной частоты, а к второму входу подключен выход первого усилителя, выход фазометра соединен с первым входом счетчика 11 определения длительности сигнала разности фаз, первый компаратор 12, к входу которого подключен выход второго усилителя, выход первого компаратора соединен с первым входом счетчика 13 определения длительности отраженного сигнала и с первым входом счетчика 14 определения межлопастных временных интервалов, генератор 15 тактовых импульсов (ГТИ), выход которого подключен к вторым входам счетчиков 11, 13 и 14, выходные разряды счетчиков 11, 13 и 14 соединены с первой, второй и третью частью входных разрядов бортовой электронно-вычислительной машины 16, соответственно, оборотная метка 28 нижнего несущего винта, взаимодействующая с первым оборотным датчиком 17, выход которого подключен к входу второго компаратора 18, оборотная метка 29 верхнего несущего винта, взаимодействующая со вторым оборотным датчиком 19, выход которого соединен с входом третьего компаратора 20, выход второго компаратора подключен к первому входу счетчика 21 определения частоты вращения ротора нижнего несущего винта вертолета, выход третьего компаратора соединен с входом счетчика 22 определения частоты вращения ротора верхнего несущего винта вертолета, выход ГТИ 15 подключен к вторым входам счетчиков 21 и 22, выходные разряды которых соединены с четвертой и пятой частью входных разрядов БЭВМ 16 соответственно, датчик 23 определения установки дифференциального шага винта, выход которого подключен к первому входу блока аналогово-цифровых преобразователей 24, датчик 25 определения установки общего шага винта, выход которого соединен с вторым входом блока АЦП 24, датчик 26 определения установки циклического продольного шага винта, выход которого подключен к третьему входу блока АЦП 24, датчик 27 определения установки циклического поперечного шага винта, выход которого соединен с четвертым входом блока АЦП 24, выходные разряды блока АЦП 24 соединены с шестой частью входных разрядов БЭВМ 16.
Устройство, реализующее предложенный способ контроля целостности лопастей несущего винта вертолета работает следующим образом.
Генератор 1 формирует гармонический СВЧ-сигнал, который модулируется по амплитуде в модуляторе 2, по закону изменения масштабной частоты, генерируемой в генераторе 3 масштабной частоты. Сформированный модулированный электромагнитный поток посредством АФС 4 излучается в направлении поверхности вращения несущих винтов вертолета. Излученный поток, отражается от лопасти и частично попадает на приемную АФС 5. Электрический сигнал с приемной АФС 5, выделяется блоком фильтров 6 и детектируется при помощи детектора 7 после чего усиливается усилителями 8 и 9. С первого усилителя 8 сигнал поступает на фазометр 10. Фазы опорного масштабного сигнала и принятого масштабного сигнала сравниваются в фазометре 10, в результате на его выходе формируется прямоугольный импульс разности фаз (Фиг. 2 эпюра 12). Сформированные прямоугольные импульсы разности фаз поступают на счетчик 11 определения длительности сигнала разности фаз.
Сигнал, усиленный вторым усилителем 9 поступает на первый компаратор 12, выходные прямоугольные лопастные импульсы которого поступают на информационные входы счетчиков: счетчик 13 определения длительности отраженного сигнала и счетчик 14 определения межлопастных временных интервалов. С ГТИ 15 на тактовые входы счетчиков 11, 13 и 14 поступают тактовые импульсы. В БЭВМ 16 сравнивается с тарированными характеристиками длительность отраженного (лопастного) сигнала и период его повторения, а также длительность сигнала разности фаз, в результате чего, соответственно, определяется угол установки лопасти непосредственно над АФС, межлопастное расстояние и расстояние до лопасти.
Первый бесконтактный оборотный датчик 17, например, вихретокового типа, генерирует электрические импульсы, полученные в результате взаимодействия возбудителя 29 с первым оборотным датчиком 17. Полученные оборотные импульсы подаются на второй компаратор 18. Сформированные прямоугольные оборотные импульсы ННВ поступают на информационный вход первого счетчика 21 определения частоты вращения ротора нижнего несущего винта вертолета.
Второй бесконтактный оборотный датчик 19, например, вихретокового типа, генерирует электрические импульсы, полученные в результате взаимодействия возбудителя 29 со вторым оборотным датчиком 19. Полученные оборотные импульсы подаются на третий компаратор 20. С его выхода сформированные прямоугольные оборотные импульсы ВНВ поступают на информационный вход второго счетчика 22 определения частоты вращение ротора верхнего несущего винта вертолета.
Для обеспечения работы счетчиков 21 и 22 на их тактовые входы поступают тактовые импульсы с ГТИ 15.
Посредством блока АЦП 24 оцифровываются сигналы (Фиг. 2 эпюры 8, 9) с датчика определения установки дифференциального шага винта 23, с датчика определения установки общего шага винта 25, с датчика определения установки циклического продольного шага винта 26 и с датчика определения установки циклического поперечного шага винта 27 (Фиг. 1, 3). В БЭВМ 16, используя оцифрованные значения амплитуд сигналов с датчиков 23, 25, 26, 27, по тарированным характеристикам, которые записаны в памяти БЭВМ 16, определяют угол установки лопасти, который установлен автоматом перекоса. Далее, в БЭВМ 16 вычисляется угол скручивания лопасти как разность между углом установки лопасти автоматом перекоса и углом установки лопасти непосредственно над антенной (ϕскр=ϕ0,7R-ϕосн).
Синхронизация работы устройства осуществляется прямоугольными импульсами (Фиг. 2 эпюра 2) первого оборотного датчика НВВ 17, программа БЭВМ 16 реализует следующий алгоритм работы: в начале цикла формируется эталонная (базовая) информация, в этом режиме для всех лопастей верхнего и нижнего несущих винтов вертолета измеряются углы скручивания, длительности межлопастных сигналов, длительности отраженных сигналов, длительности сигналов разности фаз и период оборотных импульсов, (Фиг. 2 эпюра 6, 7, 13), затем находятся относительные значения временных интервалов путем вычисления отношения лопастных и межлопастных временных интервалов к периоду вращения ротора соответствующего несущего винта вертолета.
БЭВМ 16 содержит в своей памяти, полученные для каждой лопасти эталонные относительные величины, а также выполняет все необходимые математические и логические операции. В рабочем режиме, в БЭВМ 16 измеряются текущие разности фаз между излученным и принятым масштабными сигналами, углы скручивания лопастей, длительности лопастных и межлопастных интервалов, измеряются текущие периоды вращения роторов нижнего и верхнего несущих винтов и вычисляются отношения измеренных текущих длительностей лопастных и межлопастных импульсов к текущему периоду вращения соответствующего ротора и сравниваются с хранящимися в памяти БЭВМ 16 эталонными величинами путем нахождения результата сравнения текущего значения с минимальным и максимальным значением временного интервала, значения разности фаз и углов скручивания для каждой лопасти соответственно. Полученные результаты сравнения в виде электрических сигналов поступают для дальнейшего использования на соответствующие выходные разряды БЭВМ 16, являющейся выходной частью устройства и в цифровом или графическом вариантах отображаются, например, на экране монитора БЭВМ 16.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ КОНТРОЛЯ ЦЕЛОСТНОСТИ ЛОПАСТЕЙ НЕСУЩЕГО ВИНТА ВЕРТОЛЕТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2015 |
|
RU2593652C1 |
| Способ обнаружения вертолетов бортовой радиолокационной станцией | 2018 |
|
RU2691387C1 |
| СИСТЕМА УПРАВЛЕНИЯ БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА | 2024 |
|
RU2837059C1 |
| СИСТЕМА УПРАВЛЕНИЯ БЕСПИЛОТНЫМ ЛЕТАТЕЛЬНЫМ АППАРАТОМ | 2001 |
|
RU2189625C1 |
| СПОСОБ ОБНАРУЖЕНИЯ И РАСПОЗНАВАНИЯ ВЕРТОЛЕТА С ИСПОЛЬЗОВАНИЕМ РАДИОЛОКАТОРА | 2003 |
|
RU2260815C2 |
| ВЕРТОЛЕТНАЯ РАДИОЛОКАЦИОННАЯ СТАНЦИЯ | 2000 |
|
RU2253132C2 |
| УСТРОЙСТВО ДЛЯ ДИНАМИЧЕСКОЙ БАЛАНСИРОВКИ НЕСУЩЕГО ВИНТА ВЕРТОЛЕТА | 2010 |
|
RU2441807C1 |
| СПОСОБ БЕСКОНТАКТНОГО ОПРЕДЕЛЕНИЯ ТЕХНИЧЕСКОГО СОСТОЯНИЯ ЗУБЧАТЫХ КОЛЕС И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2015 |
|
RU2602488C1 |
| РАДИОЛОКАЦИОННАЯ СИСТЕМА БЛИЖНЕГО ДЕЙСТВИЯ ДЛЯ ПРЕДУПРЕЖДЕНИЯ СТОЛКНОВЕНИЯ С ПРЕПЯТСТВИЯМИ МАНЕВРИРУЮЩИХ НА АЭРОДРОМЕ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2001 |
|
RU2192653C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТА УТЕЧКИ ЖИДКОСТИ ИЛИ ГАЗА ИЗ ТРУБОПРОВОДА, НАХОДЯЩЕГОСЯ В ГРУНТЕ, И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2010 |
|
RU2439519C1 |
Группа изобретений относится к способу и устройству контроля целостности лопастей несущих винтов вертолета в соосной схеме их расположения. Для реализации способа используют зондирующее излучение СВЧ диапазона для измерения колебательных параметров перемещения лопастей, фазовый метод определения амплитуды махового колебания лопасти, а также используют информацию об угле установке лопастей, получаемую от штатных датчиков. Устройство содержит генератор СВЧ сигнала, модулятор, генератор масштабной частоты, излучающую антенно-фидерную систему (АФС), приемную АФС, блок фильтров, детектор, два усилителя, фазометр, счетчик определения длительности сигнала разности фаз, три компаратора, счетчик определения длительности отраженного сигнала, счетчик определения межлопастных временных интервалов, генератор тактовых импульсов (ГТИ), бортовую электронно-вычислительной машину, два оборотных датчика, счетчик определения частоты вращения ротора нижнего несущего винта вертолета, счетчик определения частоты вращения ротора верхнего несущего винта вертолета, датчик определения установки дифференциального шага винта, блок аналогово-цифровых преобразователей, датчик определения установки общего шага винта, датчик определения установки циклического продольного шага винта, датчик определения установки циклического поперечного шага винта, оборотную метку нижнего несущего винта, оборотную метку верхнего несущего винта. Обеспечивается увеличение точности измерения параметров колебательных перемещений лопастей. 2 н.п. ф-лы, 8 ил.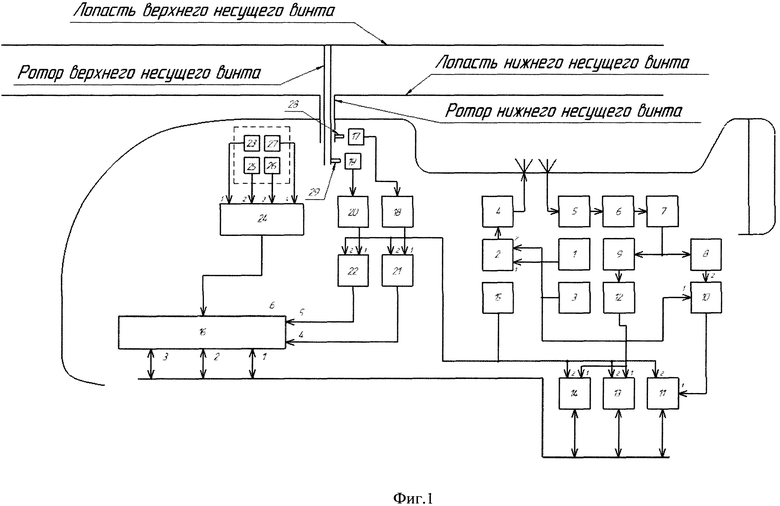
1. Способ контроля целостности лопастей несущих винтов вертолета в соосной схеме их расположения заключающийся в том, что на ротор нижнего несущего винта вертолета устанавливают возбудитель оборотной метки, на неподвижной части корпуса вертолета напротив траектории движения оборотной метки устанавливают первый неподвижный бесконтактный оборотный датчик, регистрируют электрические импульсы, полученные в результате взаимодействия возбудителя оборотной метки и первого оборотного датчика, из аналоговых электрических импульсов первого оборотного датчика формируют оборотные прямоугольные импульсы, измеряют временные интервалы между оборотными прямоугольными импульсами, получают информацию о периоде вращения ротора нижнего несущего винта вертолета, устанавливают на неподвижной части корпуса вертолета излучающую антенну с диаграммой направленности, ширина которой сравнима с угловой видимостью ширины лопасти и исключающей возможность одновременного облучения двух соседних лопастей, в непосредственной близости от излучающей антенны устанавливают приемную антенну так, чтобы ширина диаграммы направленности антенны обеспечивала уверенный прием отраженного поочередно от каждой лопасти зондирующего сигнала, антенны располагают таким образом, чтобы конструктивные элементы корпуса вертолета не попадали в зону их диаграмм направленностей, направляют зондирующее излучение посредством излучающей антенны в сторону контролируемых лопастей нижнего несущего винта, частично принимают отраженное от лопастей нижнего несущего винта зондирующее излучение приемной антенной, детектируют принятый сигнал и усиливают его огибающую, на основе огибающей формируют лопастные прямоугольные импульсы, определяют временные интервалы между лопастными прямоугольными импульсами, идентифицируют номера лопастей нижнего несущего винта вертолета посредством сравнения временного положения импульсов от оборотного датчика и лопастных прямоугольных импульсов, полученных после обработки потока, отраженного и принятого от лопастей вертолета, определяют относительные значения временных интервалов для каждого межлопастного интервала путем вычисления отношения между полученным текущим межлопастным временным интервалом и периодом вращения винта вертолета, сравнивают полученные относительные временные интервалы и амплитуды отраженных от лопастей сигналов с эталонными относительными временными интервалами и амплитудными величинами, записанными в памяти бортовой электронно-вычислительной машины, отличающийся тем, что на ротор верхнего несущего винта вертолета устанавливают второй возбудитель оборотной метки, на неподвижной части корпуса вертолета напротив траектории движения второго возбудителя оборотной метки устанавливают неподвижный второй бесконтактный оборотный датчик, регистрируют электрические импульсы, полученные в результате взаимодействия возбудителя оборотной метки со вторым оборотным датчиком, из электрических импульсов, поступающих со второго оборотного датчика формируют оборотные прямоугольные импульсы верхнего несущего винта, измеряют временные интервалы между оборотными прямоугольными импульсами, получают информацию о периоде вращения ротора верхнего несущего винта вертолета, излучающую и приемную антенны устанавливают на неподвижной части корпуса вертолета таким образом, чтобы максимумы основных лепестков их диаграмм направленности не совпадали с точкой встречи лопастей верхнего и нижнего несущих винтов вертолета, формируют генератором масштабной частоты в диапазоне высоких частот гармонический сигнал с рассчитанной масштабной частотой, модулируют сигнал сверхвысокой частоты сигналом высокой частоты при помощи модулятора, формируя таким образом зондирующее излучение, направляют зондирующее излучение посредством излучающей антенны в сторону контролируемых лопастей верхнего несущего винта, частично принимают отраженное от лопастей верхнего несущего винта зондирующее излучение приемной антенной, выделяют отраженное от лопастей и принятое приемной антенной излучение посредством блока фильтров, сравнивают фазы сгенерированного и принятого масштабных сигналов при помощи фазометра и генерируют сигнал разности фаз в виде прямоугольного импульса, измеряют его длительность, по длительности сигнала разности фаз судят об амплитуде махового колебания, идентифицируют номера лопастей верхнего несущего винта вертолета посредством сравнения временного положения импульсов от оборотного датчика верхнего несущего винта и лопастных прямоугольных импульсов, соответствующих верхнему несущему винту вертолета, измеряют длительность лопастных прямоугольных импульсов, по длительности лопастных прямоугольных импульсов определяют угол установки лопасти, находящейся непосредственно в зоне действия диаграммы направленности приемной антенны, оцифровывают посредством блока аналого-цифровых преобразователей амплитуды сигналов с датчиков дифференциального шага винта, общего шага винта, циклического продольного и поперечного шага винта и по амплитуде сигналов с этих датчиков определяют мгновенный угол установки лопасти, сравнивают мгновенный угол установки и угол установки лопасти над приемной антенной и определяют угол скручивания лопасти, сравнивают измеренный угол скручивания и длительность сигнала разности фаз с эталонными значениями, записанными в памяти бортовой электронно-вычислительной машины, эталонные значения определяются при работе с заведомо исправными лопастями, получаемыми, например, за сто полных оборотов несущих винтов вертолета на всех рабочих режимах при максимальном и минимальном возможных углах установки лопастей и максимальном приближении и удалении лопастей от апертуры приемной антенны, при этом определяются минимальные и максимальные возможные длительности импульсов для каждого межлопастного интервала, углы скручивания для каждой лопасти и сигналов разностей фаз, при обнаружении отклонения текущих значений измеренных временных интервалов от имеющихся эталонных значений формируется сигнал о неисправности конкретной лопасти или ее крепления.
2. Устройство для контроля целостности лопастей несущих винтов вертолета в соосной схеме их расположения, содержащее детектор, первый компаратор, второй компаратор, аналогово-цифровой преобразователь, генератор сигнала сверхвысокой частоты, приемную и передающую антенно-фидерные системы, первый усилитель, бортовую электронно-вычислительную машину, счетчик определения межлопастных временных интервалов, первый оборотный датчик, генератор тактовых импульсов, первый счетчик определения частоты вращения ротора нижнего несущего винта вертолета, отличающееся тем, что устройство содержит генератор масштабной частоты, модулятор, фазометр, блок фильтров, второй усилитель, счетчик определения длительности отраженного сигнала, счетчик определения длительности сигнала разности фаз, второй счетчик определения частоты вращения ротора верхнего несущего винта вертолета, второй оборотный датчик, датчик определения установки дифференциального шага винта, датчик определения установки общего шага винта, датчик определения установки циклического продольного шага винта, датчик определения установки циклического поперечного шага винта, третий компаратор, соединенные между собой следующим образом: выход генератора сверхвысокой частоты подключен к первому входу модулятора, выход генератора масштабной частоты, соединен со вторым входом модулятора и с первым входом фазометра, выход модулятора соединен с входом излучающей антенно-фидерной системы, выход приемной антенно-фидерной системы, подключен к входу блока фильтров, выход блока фильтров подключен к входу детектора, выход которого соединен с входом первого усилителя и подключен к входу второго усилителя, выход первого усилителя подключен ко второму входу фазометра, выход второго усилителя соединен с входом первого компаратора, выход фазометра подключен к первому входу счетчика определения длительности сигнала разности фаз, выход первого компаратора соединен с первым входом счетчика определения длительности отраженного сигнала и с первым входом счетчика определения межлопастных временных интервалов, генератор тактовых импульсов, выход которого подключен к вторым входам счетчиков определения длительности сигнала разности фаз, определения длительности отраженного сигнала и определения межлопастных временных интервалов и к вторым входам счетчиков определения частоты вращения роторов нижнего и верхнего несущих винтов вертолета, выходные разряды счетчика определения длительности сигнала разности фаз подключены к первой части разрядов входного интерфейса бортовой электронно-вычислительной машины, выходные разряды счетчика определения длительности отраженного сигнала соединены со второй частью разрядов входного интерфейса бортовой электронно-вычислительной машины, выходные разряды счетчика определения межлопастных временных интервалов подключены к третьей части разрядов входного интерфейса бортовой электронно-вычислительной машины, первый оборотный датчик соединен с входом второго компаратора, второй оборотный датчик подключен к входу третьего компаратора, выход второго компаратора соединен с первым входом счетчика определения частоты вращения ротора нижнего несущего винта вертолета, выход третьего компаратора подключен к первому входу счетчика определения частоты вращения ротора верхнего несущего винта вертолета, выходные разряды счетчика определения частоты вращения ротора нижнего несущего винта вертолета подключены к четвертой части разрядов входного интерфейса бортовой электронно-вычислительной машины, выходные разряды счетчика определения частоты вращения ротора верхнего несущего винта вертолета, соединены с пятой частью разрядов входного интерфейса бортовой электронно-вычислительной машины, выход датчика определения установки дифференциального шага винта подключен к первому информационному входу блока аналого-цифровых преобразователей, выход датчика определения установки общего шага винта соединен со вторым информационным входом блока аналого-цифровых преобразователей, выход датчика определения установки циклического продольного шага винта подключен к третьему информационному входу блока аналого-цифровых преобразователей, выход датчика определения установки циклического поперечного шага винта соединен с четвертым информационным входом блока аналого-цифровых преобразователей, выходные разряды блока аналого-цифровых преобразователей подключены к шестой части разрядов входного интерфейса бортовой электронно-вычислительной машины; бортовая электронно-вычислительная машина является выходным блоком, формирующим и отображающим выходные сигналы устройства.
| СПОСОБ КОНТРОЛЯ ДИНАМИЧЕСКОЙ БАЛАНСИРОВКИ ЛОПАСТЕЙ НЕСУЩЕГО И РУЛЕВОГО ВИНТОВ ВЕРТОЛЕТА | 2016 |
|
RU2628034C1 |
| СПОСОБ ИЗМЕРЕНИЯ НЕСОКОНУСНОСТИ ЛОПАСТЕЙ НЕСУЩЕГО ВИНТА ВЕРТОЛЕТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2009 |
|
RU2415053C1 |
| US 9234743 B2, 12.01.2016 | |||
| US 8463085 B2, 11.06.2013. | |||

