Изобретение относится к области исследования мирового океана, а также военной техники, в частности, может быть использовано в системах наведения телеуправляемых подводных аппаратов (ТПА) различного назначения.
Телеуправление в настоящее время широко используется в различных областях техники. В общем случае телеуправление состоит в одновременном контроле координат цели и объекта, который наводится на цель, динамическом формировании траектории движения наводимого объекта и передачи ему по линии связи рассчитанного курса на сближение с целью.
Известен способ бесконтактного телеуправления подводным аппаратом по патенту РФ №2551834 опубл. 27.05.2015 «Способ телеуправления подводным аппаратом» по гидроакустическому каналу. Здесь для обеспечения возможности поддержания контакта с целью и маневрирования носителя используют буй-ретранслятор, с которым носитель связан по гидроакустическому каналу, а подводный аппарат - по проводной линии связи. Однако наличие гидроакустического канала ограничивает возможность передачи больших объемов информации от аппарата к носителю и обратно ввиду его слабой помехозащищенности и низкой пропускной способности.
Известен способ телеуправляемого наведения торпеды по патенту 2631227 публ. 19.09.2017 «Способ наведения торпеды, управляемой по проводам», согласно которому курс торпеды вырабатывается путем совмещения ее пеленга с линией, отстоящей на некоторый угол ϕ от прогнозируемого на упрежденный момент времени пеленга на цель. Данный способ обеспечивает угловое разрешение, необходимое для раздельного обнаружения объектов и определения пеленгов на каждый из них. Однако величина этого разрешения, а соответственно и возможность раздельного наблюдения объектов, в значительной степени зависит от точности определения пеленга на цель и от величины упреждения.
Наиболее близким к представляемому техническому решению, принятым за прототип, является способ телеуправляемого наведения торпеды, изложенный на с. 41-49 вып. №3 «Подводное морское оружие», который состоит в том, что траектория наведения торпеды формируется путем совмещения положения торпеды с линией текущего пеленга на цель в каждый момент времени.
Способ включает измерение с помощью пассивной гидролокации пеленгов с носителя на цель и на торпеду; определение дистанции до торпеды; дискретное формирование траектории наведения торпеды, формирование команды управления и передачу ее по проводной линии связи с носителя на торпеду.
Недостатком способа-прототипа является отсутствие углового разнесения цели и торпеды, за счет чего создаются неблагоприятные условия для пеленгования цели системой шумопеленгования носителя, а, следовательно, и наведения на нее торпеды на протяжении всего участка телеуправления. Кроме того, обратный пеленг с цели на торпеду является одновременно и пеленгом на носитель, что негативно сказывается на его безопасности в случае ответного воздействия.
Задачей изобретения является улучшение условий пеленгования цели системой шумопеленгования носителя и обеспечение его безопасности при ответном ударе.
Техническим результатом изобретения является формирование траектории телеуправляемого наведения подводного аппарата (в прототипе - торпеды), при которой повышается качество пеленгования цели системой шумопеленгования носителя за счет наличия углового разнесения пеленга на подводный аппарат и пеленга на цель, увеличивается неуязвимость носителя при ответном воздействии за счет продолжительного движения подводного аппарата в сторону от носителя, что вызывает изменение обратного пеленга на подводный аппарат и дезинформирует цель об истинном местоположении носителя.
Для достижения указанного технического результата в способ телеуправляемого наведения подводного аппарата, включающий измерение с помощью пассивной гидролокации текущих пеленгов с носителя на цель и на подводный аппарат, определение текущей дистанции от носителя до подводного аппарата; дискретное формирование траектории наведения подводного аппарата, формирование команды управления и передачу ее по линии проводной связи с носителя на подводный аппарат, введены новые признаки - псевдо носитель, движущийся в направлении начального пеленга на цель со скоростью реального носителя, и виртуальная точка телеуправления, не совпадающая с позицией реального носителя, из которой как бы ведется телеуправление. В предлагаемом способе осуществляют двойной пересчет дистанций и пеленгов на объекты: первоначально относительно виртуального носителя, затем относительно виртуальной точки телеуправления, затем направление движения подводного аппарата формируют путем совмещения пеленгов на подводный аппарат и на цель, определенных относительно виртуальной точки телеуправления.
В момент времени t0 измеряют пеленг ПЦ0 с носителя на цель, оценивают начальную дистанцию ДЦ0 до цели и направление движения цели, вычисляют угол α между пеленгом на цель ПЦ0 с носителя и из виртуальной точки телеуправления, определяют координаты этой точки на удалении ДЦ0 и угловом разрешении α от начального положения цели, производят запуск ТПА с начальным курсом КТПА1, отличающимся от пеленга на цель с носителя на некоторый угол ϕотв. В момент времени t1 измеряют пеленг ПЦ1 с носителя на цель, пеленг ПТПА1 с носителя па ТПА, определяют дистанцию от носителя до ТПА ДТПА1 и до цели ДЦ1, пересчитывают пеленги ПЦ1, ПТПА1 и дистанции ДЦ1, ДТПА1 сначала относительно псевдо носителя, получая соответственно пеленги ΔПЦ1 и ΔПТПА1 и дистанции ΔДЦ1 и ΔДТПА1, затем относительно виртуальной точки телеуправления, получая соответственно пеленги ПЦ1* и ПТПА1* и дистанции ДЦ1* и ДТПА1*. После этого определяется угол ε1 между курсом ТПА и пеленгом на него из виртуальной точки телеуправления. Затем вырабатывают курс ТПА КТПА2, обеспечивающий максимальное перемещение ТПА в направлении цели и вывод его на линию пеленга ПЦ1* в случае возможности ее достижения за время движения между моментами корректировки курса Δt, или обеспечивающий вывод ТПА на линию, перпендикулярную пеленгу ПЦ1* в случае невозможности ее достижения за время Δt, и формируют в момент времени t1 команду управления на изменение курса ТПА исходя из значения курса КТПА2. В момент времени t2 указанные действия с момента t1 повторяют и продолжают до тех пор, пока ТПА не сблизится с целью на дистанцию, достаточную для его работы в автономном режиме, т.е. по командам собственной информационной системы. Курс ТПА, рассчитанный в соответствии с предлагаемым способом, определяется выражением

где КН - курс носителя, λ - угол между текущей и предыдущей дистанциями от виртуальной точки телеуправления до ТПА.
Таким образом, в предлагаемом способе обеспечивают вывод ТПА на линию пеленга цели, проведенную не с реального носителя, а с виртуальной точки телеуправления, координаты которой определяются в зависимости от начального положения цели, направления ее движения и начального курса ТПА.
Сущность изобретения поясняется на следующих чертежах:
фиг. 1 - графическое изображение предлагаемого способа;
фиг. 2 - графическое сравнение способов управления подводным аппаратом по предлагаемому способу и способу-прототипу.
фиг. 3 - структурная схема устройства для реализации способа
Предложенный способ работает следующим образом: в момент времени t0 носитель и цель занимают положения 0н и 0ц соответственно (фиг. 1), производят обнаружение цели системой пассивной гидролокации носителя и измеряют начальный пеленг ПЦ0 на цель и начальную дистанцию ДЦ0, после чего осуществляют пуск подводного аппарата с начальным курсом КТПА1, отличающимся от пеленга ПЦ0.
В момент времени t1 после возобновления гидроакустического контакта носителя с целью, который был прерван ввиду «экранирования» шумов цели шумами ТПА, носитель (реальный и псевдо), виртуальная точка телеуправления, цель и ТПА занимают положения 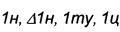 и
и  соответственно. В этот момент измеряют текущий пеленг ПТПА1 на подводный аппарат, пеленг ПЦ1 и дистанцию ДЦ1 до цели, определяют дистанцию ДТПА1 до подводного аппарата (после пуска ТПА движется с постоянной линейной скоростью), пересчитывают пеленги ПЦ1 и ПТПА1 и дистанции ДЦ1 и ДТПА1 сначала к псевдо носителю, получая соответственно пеленги ΔПЦ1 и ΔПТПА1 и дистанции ΔДЦ1 и ΔДТПА1, затем к виртуальной точке телеуправления, получая соответственно пеленги ПЦ1* и ПТПА1* и дистанции ДЦ1* и ДТПА1*, после чего определяют угол ε1. Используя эти значения определяют курс КТПА2 подводного аппарата, выводящий его на линию пеленга ПЦ1* в случае возможности ее достижения за время движения между моментами корректировки курса Δt, или обеспечивающий вывод подводного аппарата на линию, перпендикулярную пеленгу ПЦ1* в случае невозможности ее достижения за время Δt. После этого формируют команду управления на изменение курса ТПА в момент времени t1, исходя из значения курса КТПА2, и передают ее по линии проводной связи с носителя на ТПА.
соответственно. В этот момент измеряют текущий пеленг ПТПА1 на подводный аппарат, пеленг ПЦ1 и дистанцию ДЦ1 до цели, определяют дистанцию ДТПА1 до подводного аппарата (после пуска ТПА движется с постоянной линейной скоростью), пересчитывают пеленги ПЦ1 и ПТПА1 и дистанции ДЦ1 и ДТПА1 сначала к псевдо носителю, получая соответственно пеленги ΔПЦ1 и ΔПТПА1 и дистанции ΔДЦ1 и ΔДТПА1, затем к виртуальной точке телеуправления, получая соответственно пеленги ПЦ1* и ПТПА1* и дистанции ДЦ1* и ДТПА1*, после чего определяют угол ε1. Используя эти значения определяют курс КТПА2 подводного аппарата, выводящий его на линию пеленга ПЦ1* в случае возможности ее достижения за время движения между моментами корректировки курса Δt, или обеспечивающий вывод подводного аппарата на линию, перпендикулярную пеленгу ПЦ1* в случае невозможности ее достижения за время Δt. После этого формируют команду управления на изменение курса ТПА в момент времени t1, исходя из значения курса КТПА2, и передают ее по линии проводной связи с носителя на ТПА.
Когда носитель в момент времени t2 достигает положения 2н, указанные действия повторяют, пока ТПА не сблизится с целью на дистанцию, достаточную для его работы в автономном режиме по командам своей информационной системы.
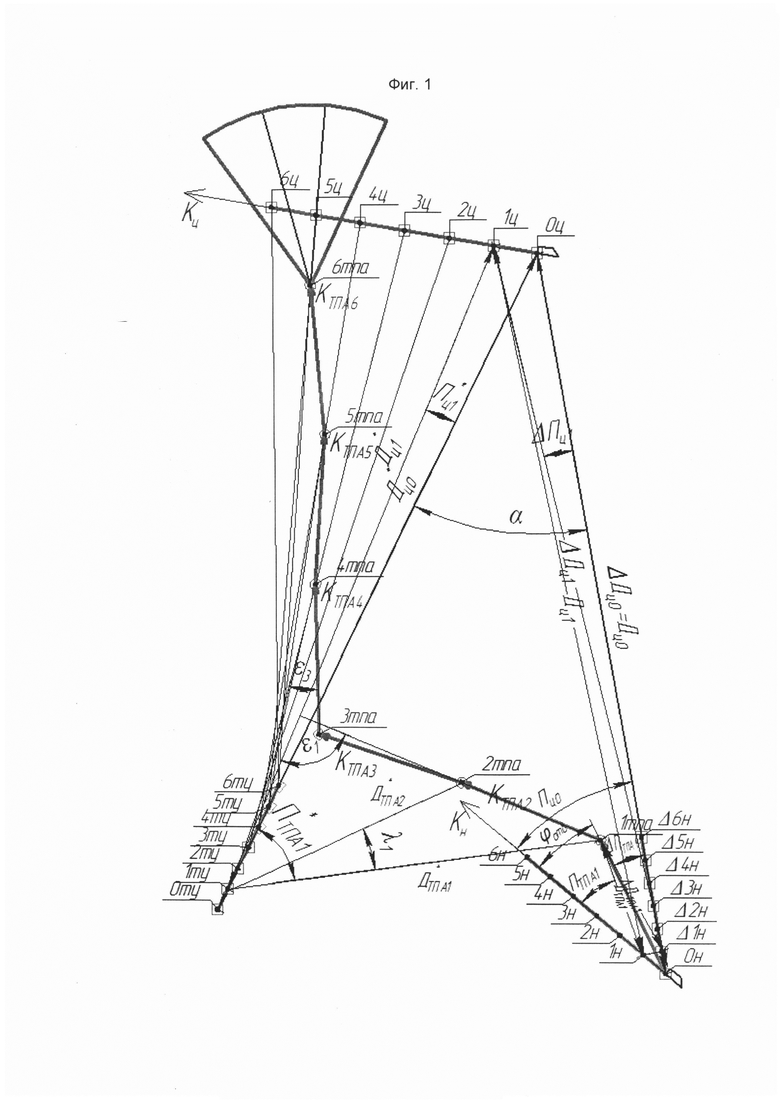
Сравнение предлагаемого способа и способа-прототипа приведено на фиг. 2. На ней пунктиром показаны расчетные положения ТПА 1тпа - 5тпа на моменты времени t1 - t5 и курсы К'ТПА2 - К'ТПА5, определенные с использованием способа-прототипа.
Сравнение способов показывает, что, например, для момента времени t2 угловое разнесение ϕ подводного аппарата и пеленга ПЦ3 на цель значительно больше угла ϕ', что позволяет обеспечить одновременное раздельное пеленгование цели и ТПА, так же, как и линейное смещение L подводного аппарата от пеленга ПЦ3 (нормаль к пеленгу ПЦ3) значительно больше линейного смещения L'. Платой за это является увеличение траектории телеуправляемого движения подводного аппарата на один шаг по сравнению со способом-прототипом. Однако, в способе-прототипе ТПА до точки 5тпа' может не дойти ввиду невозможности раздельного пеленгования цели и ТПА и выработки курса его движения.
Кроме того, при движении ТПА по способу-прототипу, обратный пеленг на ТПА с цели мало отличается от обратного пеленга на реальный носитель, что упрощает задачу определения его местоположения и обеспечения ответного воздействия целью.
В предлагаемом же способе обратный пеленг на ТПА с цели значительно отличается от обратного пеленга на носитель, величина его постоянно меняется с большой скоростью, что дезинформирует цель о задаче ТПА и обеспечивает лучшие условия безопасности для носителя.
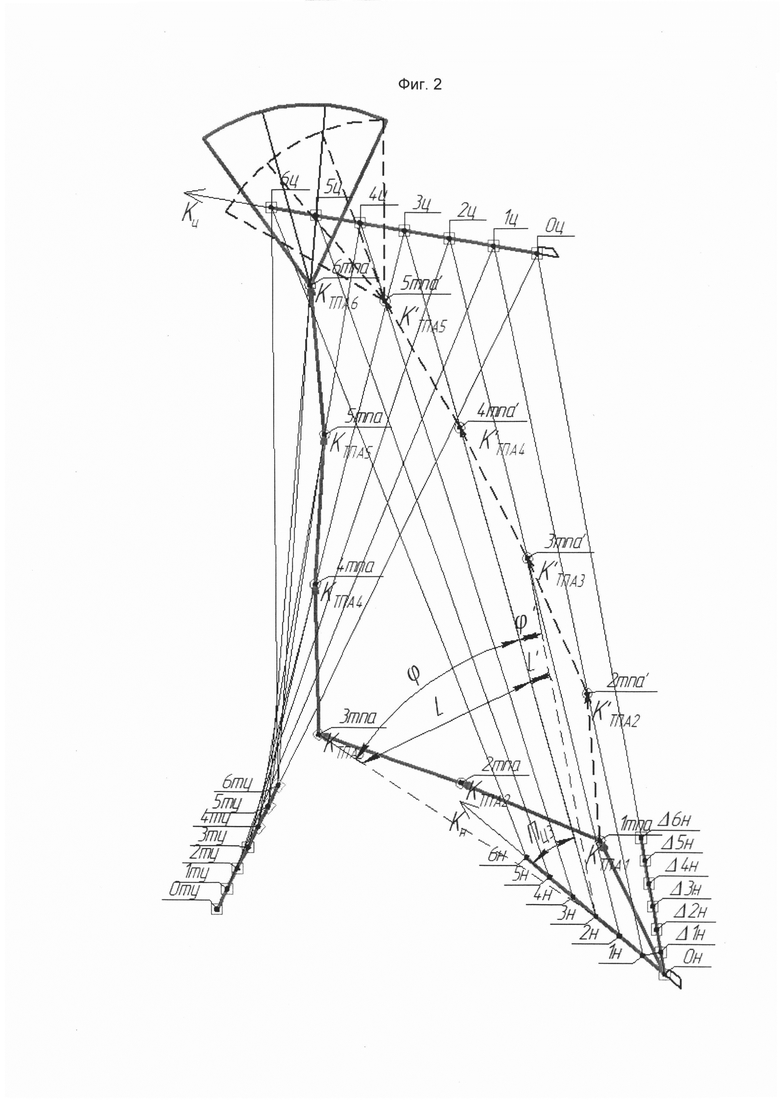
Реализация заявляемого способа телеуправляемого наведения подводного аппарата осуществляется техническими средствами, работа которых раскрыта в издании «Корабельная гидроакустическая техника». СПб: Наука, 2004. Структурная схема устройства для реализации предлагаемого способа представлена на фиг. 3.
Шум, излучаемый целью 1 и ТПА 2 при их движении распространяется в среде и принимается антенной гидроакустического комплекса (ГАК) 3 носителя 4 подводного аппарата 2. Обработав принятые шумовые сигналы ГАК выдает значения пеленгов ПТПА и ПЦ на подводный аппарат 2 и цель 1 соответственно, которые поступают в информационно-управляющую систему 5, в которой в блоке 6 определения дистанции на основе информации о пеленгах на обнаруженные объекты производится определение дистанции до них (ДТПА и ДЦ), причем ДТПА возможно определять путем счисления координат ТПА за счет передачи с него на носитель информации о его текущей скорости и курсе. Полученные дистанции ДТПА и ДЦ и пеленги на объекты ПТПА и ПЦ попадают в блок 7, где производят их пересчет к псевдо носителю. На выходе блока 7 получают значения пеленгов и дистанций до объектов ΔДТПА и ΔДЦ относительно псевдо носителя после чего в блоке 8 пересчитывают дистанции ΔДТПА и ΔДЦ и пеленги ΔПТПА и ΔПЦ относительно виртуальной точки телеуправления, получая тем самым значения дистанций ДТПА* и ДЦ* и пеленгов ПТПА* и ПЦ*.
На основе полученных дистанций и пеленгов на объекты 1 и 2 относительно виртуальной точки телеуправления в блоке 9 выработки курса производят расчет текущего курса подводного аппарата на сближение с целью КТПА, информация о котором поступает в систему 10 телеуправления, где кодируется и передается по линии связи на подводный аппарат.
Описанная процедура повторяется до тех пор, пока подводный аппарат не сблизится с целью на дистанцию, достаточную для его наведения с помощью собственной информационной системы.
Таким образом, предлагаемый способ телеуправляемого наведения подводного аппарата обеспечивает наличие углового разнесения ТПА и цели, улучшая тем самым условия пеленгования цели, и повышает степень неуязвимости реального носителя за счет продолжительного движения ТПА в сторону от него.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ НАВЕДЕНИЯ ТОРПЕДЫ, УПРАВЛЯЕМОЙ ПО ПРОВОДАМ | 2016 |
|
RU2631227C1 |
| Способ наведения торпеды, управляемой по проводам | 2018 |
|
RU2694792C1 |
| СПОСОБ ПОРАЖЕНИЯ МОРСКОЙ ЦЕЛИ ТОРПЕДОЙ | 2019 |
|
RU2736660C2 |
| СПОСОБ ПОРАЖЕНИЯ МОРСКОЙ ЦЕЛИ ТОРПЕДАМИ | 2019 |
|
RU2733734C2 |
| Система для поражения торпедами надводной цели | 2022 |
|
RU2831207C2 |
| СПОСОБ ЗАЩИТЫ НАДВОДНОГО КОРАБЛЯ ОТ ТОРПЕДЫ | 2020 |
|
RU2746085C1 |
| СПОСОБ ЗАЩИТЫ НАДВОДНОГО КОРАБЛЯ И СУДНА ОТ ПОРАЖЕНИЯ ТОРПЕДОЙ | 2019 |
|
RU2733732C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ ДВИЖЕНИЯ ТОРПЕДЫ | 2014 |
|
RU2568935C1 |
| Подводный аппарат с сетевым тралом | 2019 |
|
RU2724218C1 |
| СПОСОБ ПОРАЖЕНИЯ МОРСКОЙ ЦЕЛИ | 2017 |
|
RU2692332C2 |
Способ телеуправляемого наведения подводного аппарата относится к области исследования мирового океана в различных областях техники, в частности, может быть использовано в системах наведения телеуправляемых подводных аппаратов различного назначения при работе в водной среде. В общем случае телеуправление состоит в одновременном контроле координат цели и объекта, который наводится на цель, динамическом формировании траектории движения наводимого объекта и передачи ему по линии связи рассчитанного курса на сближение с целью. Техническим результатом изобретения является формирование траектории телеуправляемого наведения подводного аппарата, при которой повышается качество пеленгования цели системой шумопеленгования носителя за счет наличия углового разнесения пеленга на подводный аппарат и пеленга на цель, повышение степени неуязвимости носителя при ответном воздействии, который достигается тем, что в способ телеуправляемого наведения подводного аппарата, включающий измерение с помощью пассивной гидролокации текущих пеленгов с носителя на цель и на подводный аппарат, определение текущей дистанции от носителя до подводного аппарата, дискретное формирование траектории наведения подводного аппарата, формирование команды управления и передачу ее по линии проводной связи с носителя на подводный аппарат, введены новые признаки - псевдоноситель, движущийся в направлении начального пеленга на цель со скоростью реального носителя, и виртуальная точка телеуправления, не совпадающая с позицией носителя, из которой как бы ведется телеуправление, осуществляют двойной пересчет дистанций и пеленгов на объекты: первоначально относительно псевдоносителя, затем относительно виртуальной точки телеуправления, после чего направление движения подводного аппарата формируют путем совмещения пеленгов на подводный аппарат и на цель, определенных относительно виртуальной точки телеуправления. Таким образом, предлагаемый способ обеспечивает наличие углового разнесения подводного аппарата и цели, улучшая тем самым качество пеленгования цели, и повышает степень неуязвимости носителя за счет продолжительного движения подводного аппарата в стороне от носителя. 3 ил.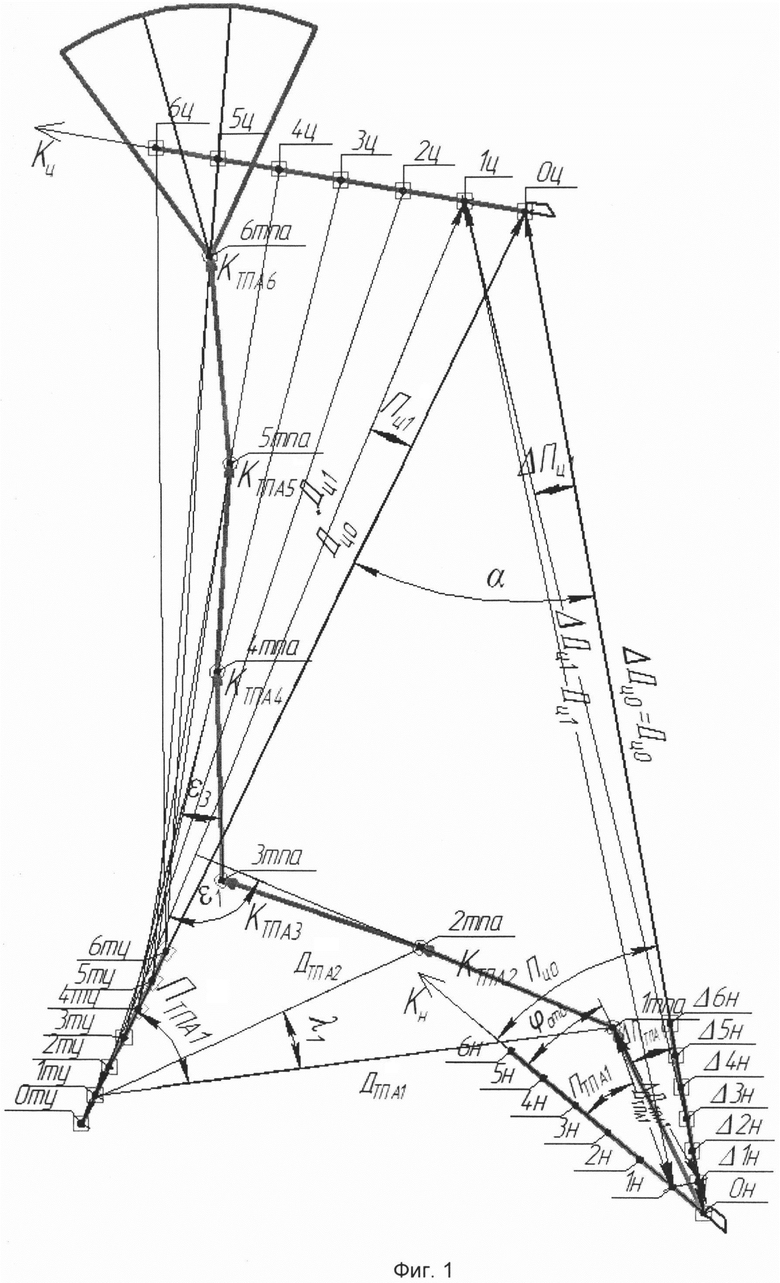
Способ телеуправляемого наведения подводного аппарата, при котором измеряют с помощью пассивной гидролокации текущие пеленги с носителя на цель и на телеуправляемый подводный аппарат, определяют текущие дистанции от носителя до телеуправляемого подводного аппарата и до цели, разрабатывают направление движения телеуправляемого подводного аппарата для дискретного формирования траектории его наведения на цель, формируют команды управления и передают их по линии связи с носителя на телеуправляемый подводный аппарат, отличающийся тем, что направление движения телеуправляемого подводного аппарата формируют путем совмещения пеленга на него с пеленгом цели относительно виртуальной точки телеуправления, пространственно не совпадающей с местоположением реального носителя, для чего первоначально измеренные им пеленги и дистанции до телеуправляемого подводного аппарата и цели пересчитывают сначала относительно псевдоносителя, движение которого проецируют в направлении начального пеленга цели со скоростью реального носителя, а затем относительно виртуальной точки телеуправления, чем обеспечивают вывод телеуправляемого подводного аппарата на линию пеленга на цель из виртуальной точки, производят повторение указанных операций до момента сближения телеуправляемого подводного аппарата с целью на дистанцию, начиная с которой последний переходит на работу в автономном режиме по командам своей информационной системы.
| СПОСОБ НАВЕДЕНИЯ ТОРПЕДЫ, УПРАВЛЯЕМОЙ ПО ПРОВОДАМ | 2016 |
|
RU2631227C1 |
| СИСТЕМА АВТОМАТИЗИРОВАННОГО УПРАВЛЕНИЯ КОМПЛЕКСОМ ТОРПЕДНО-РАКЕТНОГО ВООРУЖЕНИЯ ПОДВОДНОЙ ЛОДКИ | 2001 |
|
RU2200346C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ ДВИЖЕНИЯ ТОРПЕДЫ | 2014 |
|
RU2568935C1 |
| СПОСОБ ЗАЩИТЫ ПОДВОДНОЙ ЛОДКИ ОТ ШИРОКОПОЛОСНОЙ МИНЫ-ТОРПЕДЫ | 2011 |
|
RU2474512C2 |
| US 6259974 B1, 10.07.2001 | |||
| US 6651004 B1, 18.11.2003. | |||

