Изобретение относится к способу управления регулируемой восстанавливающей силой на педали акселератора автомобиля, в частности грузового автомобиля, а также к автомобилю с педалью акселератора с силовой обратной связью и системой управления для педали акселератора с силовой обратной связью, которая выполнена таким образом, чтобы выполнять вышеупомянутый способ.
Из уровня техники, в частности, в легковых автомобилях, известно оснащение педалей акселераторов так называемой функцией силовой обратной связи, которая воздействует регулируемой, воспринимаемой водителем восстанавливающей силой на педаль акселератора. Эта сила реакции или восстанавливающая сила служит тому, чтобы передавать водителю соответствующую осязаемую информацию или сигнал, чтобы побуждать его перемещать педаль акселератора или исполнительный орган в заданное положение педали акселератора против силы приведения в действие или удерживать ее в этом положении. Подобные педали акселератора называют педалями акселератора с силовой обратной связью. В DE 10 2007 021 982 А1 описано конструктивное выполнение подобной педали акселератора с функцией силовой обратной связи.
Из публикации DE-OS 27 35 695 известна система педали акселератора для транспортного средства с двигателем внутреннего сгорания, в которой, для достижения экономичного режима вождения, на педали акселератора создается повышенное противодавление для случая, когда текущее приведение в действие педали лежит вне экономически оптимального диапазона. Система педали акселератора включает в себя, помимо педали акселератора, которая должна перемещаться водителем между исходным положением и максимальным положением приведения в действие и пассивным упругим элементом нагружается противодавлением педали, действующим в направлении исходного положения, активно регулируемый исполнительный орган, через который может генерироваться дополнительное противодавление педали, которое суммируется с противодавлением педали пассивного упругого элемента, за счет чего повышается прикладываемое водителем полное усилие для приведения в действие педали акселератора. Исполнительный орган управляется в зависимости от разрежения в системе всасывания и/или от числа оборотов двигателя. При спадании ниже заданного разрежения или при превышении заданного числа оборотов двигателя исходят из того, что транспортное средство эксплуатируется не в экономически оптимальном режиме. В этом случае приводится в действие исполнительный орган, и устанавливается повышенное противодавление на педали акселератора, чтобы уведомлять водителя о неоптимальном режиме вождения. Повышенное противодавление педали должно побуждать водителя к тому, чтобы устанавливать положение педали с более низким противодавлением, которое соответствует оптимальному режиму вождения.
Кроме того, из DE 102 12 674 А1 известен способ для создания регулируемой восстанавливающей силы в транспортном средстве, при котором пассивным упругим элементом создается основное значение восстанавливающей силы, а активно регулируемым силовым управляющим элементом - переменная восстанавливающая сила, причем высота переменной восстанавливающей силы определяется в зависимости от параметров состояния транспортного средства и/или параметров транспортного средства или может устанавливаться переменным образом как функция параметров состояния транспортного средства и/или параметров транспортного средства. В случае параметров состояния транспортного средства и параметров транспортного средства речь может идти о двигательных параметрах, например, о подаче топлива, или о не являющихся двигательными параметрах, например, о параметрах, описывающих состояние силы тяги и динамику вождения. Через переменную установку высоты и/или направления переменной восстанавливающей силы может передаваться целенаправленная информация о событии, инициирующем восстанавливающее действие.
DE 10 2004 026 410 А1 раскрывает также способ для управления регулируемой восстанавливающей силой на педали акселератора в транспортном средстве, при котором действующая на педаль акселератора восстанавливающая сила может регулироваться переменным образом как функция параметров состояния транспортного средства и/или параметров транспортного средства, причем, в частности, предлагается, восстанавливающую силу, действующую на педаль акселератора, регулировать как функцию фактической скорости транспортного средства и/или фактического ускорения транспортного средства и/или параметра, характеризующего поведение водителя за рулем.
Для вышеупомянутых способов общим является то, что они управляют действующей на педаль акселератора восстанавливающей силой как функцией от параметров состояния транспортного средства и/или параметров транспортного средства, например, разрежения в системе всасывания, числа оборотов двигателя, подачи топлива, фактической скорости транспортного средства и/или фактического ускорения транспортного средства. При этом недостатком является то, что водителю тем самым указывается на неоптимальный для потребления режим вождения, после того как он в принципе уже наступил.
Поэтому задачей изобретения является предоставить способ для управления регулируемой восстанавливающей силой на педали акселератора, с помощью которого можно избежать недостатков известного способа. Задачей изобретения, в частности, является предоставить способ для управления регулируемой восстанавливающей силой на педали акселератора, который может лучше указывать водителю на оптимальный по потреблению режим эксплуатации.
Эти задачи решаются способом с признаками основного пункта формулы изобретения. Предпочтительные формы выполнения и применения изобретения являются предметом зависимых пунктов формулы изобретения и подробнее поясняются в последующем описании частично со ссылками на чертежи.
Согласно обобщенным аспектам изобретения, указанные задачи решаются способом управления регулируемой восстанавливающей силой на педали акселератора грузового автомобиля, при котором восстанавливающая сила, действующая на педали акселератора, может регулироваться переменным образом в зависимости от топографических данных. Таким образом, педаль акселератора выполнена как педаль акселератора с силовой обратной связью.
На основе топографических данных лежащего впереди участка пути опережающим образом на лежащем впереди участке пути могут предвосхищаться изменения, влияющие на потребление топлива, и путем соответствующего формирования и/или изменения восстанавливающей силы, действующей на педаль акселератора, сигнализироваться водителю. Так, например, в зависимости от топографических данных для лежащего впереди участка пути могут определяться места на лежащем впереди участке пути, в которых водителю посредством изменения восстанавливающей силы, действующей на педаль акселератора, указывается на уменьшающий потребление топлива заданный режим вождения и/или на уменьшающую потребление топлива заданную максимальную скорость. Иными словами, водителю, посредством осязательной (гаптической) обратной связи, сформированной посредством педали акселератора, и не требуя от него наблюдения показаний прибора, сигнализируется положение педали акселератора, которое обуславливает уменьшающий потребление топлива режим вождения.
Вышеназванные топографические данные могут, например, предоставляться навигационной системой или устройством памяти топографических данных. Топографические данные соответствующего участка пути содержат информацию о топографическом профиле участка пути и могут, например, сохраняться как относительная информация о высоте или как информация о подъеме/спуске.
Одна возможность соответствующей изобретению реализации предусматривает, что при движении в плоскости, которая может распознаваться на основе топографических данных, переменная точка давления педали акселератора, соответственно, изменяется таким образом, что транспортное средство может двигаться с регулируемой, предопределенной первой заданной максимальной скоростью, если водитель регулирует педаль акселератора, соответственно, на эту точку давления.
Водитель ощущает эту точку давления в форме повышенной силы реакции на определенном положении педали акселератора, которая действует противоположно направлению приведения в действие педали акселератора и генерируется исполнительным органом педали акселератора с силовой обратной связью. Точка давления при движении в плоскости, таким образом, непрерывно изменяется при необходимости посредством контура регулирования, так что за счет соответствующего точке давления положения педали акселератора, запрашивается соответствующий по высоте момент двигателя, чтобы скорость движения транспортного средства соответствовала первой заданной максимальной скорости. Альтернативно, характеристика педали акселератора может непрерывно подстраиваться, чтобы скорость движения транспортного средства соответствовала первой заданной максимальной скорости. Если водитель поддерживает свою текущую воздействующую силу на педали акселератора по существу постоянной, то ввиду изменяющейся точки давления без дополнительного участия водителя скорость автоматически поддерживается на первой заданной максимальной скорости.
В грузовых автомобилях эта предопределенная первая заданная максимальная скорость может, например, устанавливаться ниже допустимой максимальной скорости грузового автомобиля, если пользователь, например, транспортно-экспедиционное предприятие хотело бы эксплуатировать свое транспортное средство или свой парк транспортных средств для снижения аэродинамического сопротивления особенно эффективным по потреблению способом. Достижение этой установленной первой заданной максимальной скорости в плоскости тогда сигнализируется водителю осязательным образом посредством точки давления. За счет соответствующей затраты силы водитель может также перейти через эту точку давления, чтобы ехать быстрее, чем с первой заданной максимальной скоростью, однако для этого он должен сознательно перейти через эту точку давления.
Кроме того, в зависимости от топографических данных может определяться начало лежащего впереди подъема, и перед началом лежащего впереди подъема переменная точка давления может устанавливаться таким образом, что транспортное средство движется с регулируемой предопределенной второй заданной максимальной скоростью, если водитель устанавливает педаль акселератора, соответственно, на точку давления, причем вторая заданная максимальная скорость выше, чем первая заданная максимальная скорость.
Если, таким образом, водитель поддерживает свою текущую воздействующую силу на педали акселератора по существу постоянной, то перед началом подъема, ввиду согласованной с второй заданной максимальной скоростью точки давления, без дальнейшего участия водителя скорость транспортного средства автоматически повышается до второй заданной максимальной скорости, так что транспортное средство с запасом скорости въезжает на подъем. За счет этого кинетическая энергия транспортного средства может целенаправленно использоваться для по меньшей мере частичного преодоления подъема, так как водитель может дополнительно на подъеме использовать маховой момент. После въезда на подъем, точка давления предпочтительно возвращается назад, так что переменная точка давления соответствует скорости движения, равной по высоте первой заданной скорости.
Кроме того, в зависимости от топографических данных может определяться начало лежащего впереди участка спуска. В предпочтительном варианте этой формы выполнения посредством изменения восстанавливающей силы, воздействующей на педаль акселератора, водителю передается первый сигнал, когда автомобиль находится на первом расстоянии перед началом лежащего впереди участка спуска. Кроме того, посредством изменения восстанавливающей силы, воздействующей на педаль акселератора, водителю передается второй сигнал, когда автомобиль находится на втором расстоянии перед или после начала лежащего впереди участка спуска, причем второе расстояние меньше, чем первое расстояние.
Например, для формирования первого сигнала, восстанавливающая сила, воздействующая на педаль акселератора, может изменяться таким образом, что формируется сигнал постукивания или пощелкивания, предпочтительно сигнал двойного постукивания или двойного пощелкивания, например, посредством импульсного варьирования восстанавливающей силы. Другая возможность заключается, например, в формировании сигнала вибрации или сигнала толчков посредством соответственно быстрого варьирования восстанавливающей силы.
Для формирования второго сигнала может, например, формироваться отчетливо воспринимаемая сила реакции, таким образом, что водитель посредством педали акселератора не может запрашивать дополнительный момент или для этого должен осознанно переходить через силу реакции. Кроме того, формирование силы реакции может также выполняться таким образом, что оно выполняется с возрастанием, так что водитель при въезде на спуск через силу реакции получает указание в соответствии с ситуацией поэтапно отпускать педаль акселератора. При этом является предпочтительным второе расстояние выбирать таким образом, что второй сигнал формируется в начале участка спуска или непосредственно перед или непосредственно после начала участка спуска.
Особое преимущество этих вариантов выполнения заключается в том, что водитель посредством первого сигнала своевременно получает указание на расположенный впереди спуск, так что для улучшенного использования кинетической энергии он может уже перед спуском отпускать педаль акселератора для снижения потребления. Непосредственно перед участком спуска формирование ощутимой силы реакции может препятствовать или по меньшей мере затруднять то, что водитель через педаль акселератора сможет установить дополнительный момент.
Другая возможность содействия оптимизированному по потреблению режиму вождения предусматривает, что во время режима качения с разомкнутым силовым замыканием в трансмиссии автомобиля и в случае, если текущая скорость больше, чем устанавливаемое предопределенное пороговое значение скорости, посредством педали акселератора формируется отчетливо воспринимаемая сила реакции и/или точка давления, так что водитель для замыкания трансмиссии должен осознанно перейти через сформированную силу реакции и/или точку давления. Этот вариант препятствует тому, что водитель по недосмотру и/или случайно может завершить эффективный по потреблению режим качения посредством легкого приведения в действие педали акселератора.
В предпочтительном варианте этой формы выполнения оптимальная длина режима качения с начальной точкой и конечной точкой режима качения может вычисляться в зависимости от топографических данных, и точка давления может формироваться только в течение движения или режима качения транспортного средства между начальной и конечной точкой.
Другой аспект изобретения касается автомобиля, особенно грузового автомобиля, содержащего педаль акселератора с силовой обратной связью и систему управления для педали акселератора с силовой обратной связью, которая выполнена таким образом, чтобы выполнять соответствующий изобретению способ, как раскрыто в настоящем документе.
Вышеописанные предпочтительные формы выполнения и признаки изобретения могут различным образом комбинироваться друг с другом. Дополнительные детали и преимущества изобретения описываются ниже со ссылкой на приложенный чертеж, который иллюстрирует управление регулируемой восстанавливающей силой на педали акселератора грузового автомобиля в зависимости от топографических данных. При этом может использоваться известная из уровня техники педаль акселератора с силовой обратной связью, формируемая восстанавливающая сила которой может регулироваться варьируемым образом. Управление регулируемой восстанавливающей силой на педали акселератора осуществляется согласно форме выполнения изобретения посредством способа или системы управления, как описано ниже.
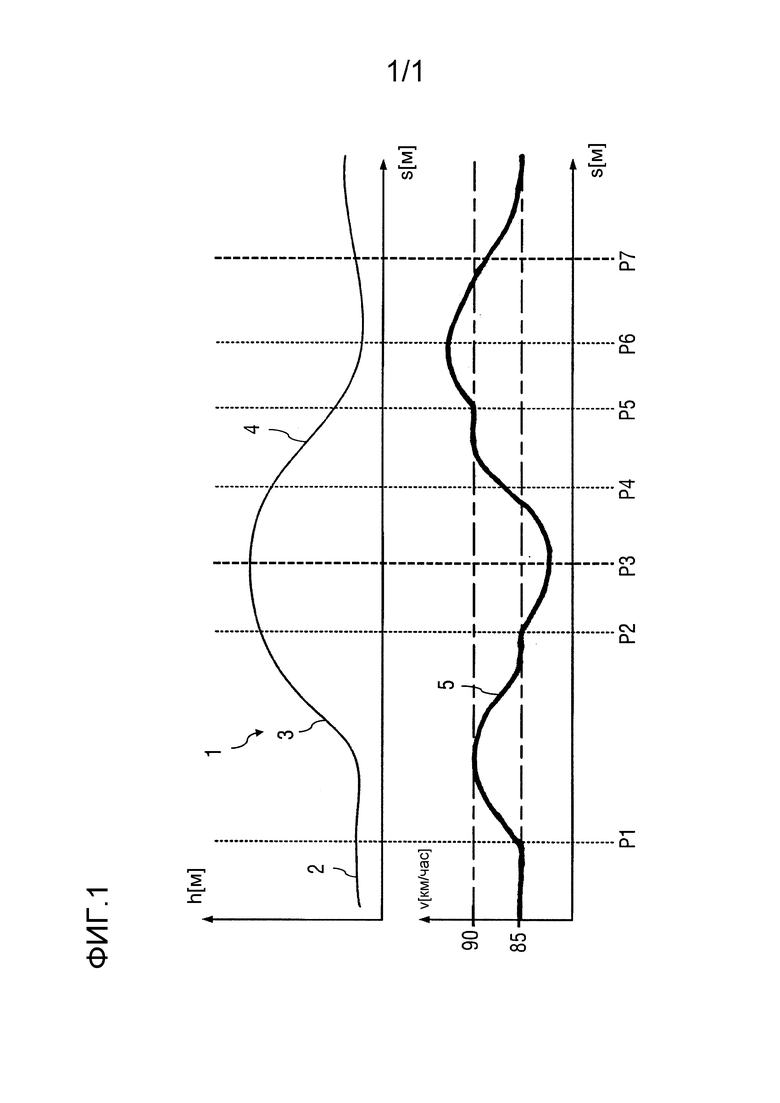
Верхняя диаграмма на фиг.1 представляет топографический профиль лежащего впереди маршрута 1 движения в форме относительной информации о высоте. На основе установленного маршрута в навигационной системе непрерывно определяются топографические данные лежащего впереди маршрута движения. Подобные топографические данные могут, например, предоставляться в форме относительных информаций о высоте или как информации о подъемах/спусках навигационной системой блока управления для управления регулируемой восстанавливающей силой педали акселератора. Нижняя диаграмма на фиг.2 показывает профиль фактической скорости 5 грузового автомобиля вдоль маршрута движения, когда водитель приводит в действие педаль акселератора в соответствии с выработанным в соответствии с изобретением указанием посредством функции силовой обратной связи.
Во время движения непрерывно контролируется топографический профиль лежащего впереди участка пути. Если грузовой автомобиль движется в плоскости, представленной участком 2 маршрута 1 движения, то переменная точка давления педали акселератора устанавливается таким образом, что автомобиль движется с регулируемой, предопределенной первой заданной максимальной скоростью, когда водитель устанавливает педаль акселератора соответственно на точку давления. В примере по фиг.1 это первое пороговое значение скорости составляет 85 км/час и лежит, таким образом, несколько ниже допустимой максимальной скорости 90 км/час грузового автомобиля. Таким образом, водителю, не требуя, чтобы он смотрел на показания прибора, сигнализируется посредством осязательной обратной связи через точку давления педали акселератора, какое положение педали акселератора приводит к предопределенной заданной максимальной скорости 85 км/час в этой плоскости. Если водитель не переходит через эту точку давления, то автомобиль движется в области 2 с текущей фактической скоростью 85 км/час.
Это первое пороговое значение скорости может заранее устанавливаться на желательное значение и согласовываться с предпочтениями пользователя. В случае пользователей, которые придают большее значение максимально высокой эффективности потребления, это значение может, например, устанавливаться на более низкое значение, чем в случае пользователей, которые придают более высокий приоритет более коротким временам движения.
Если на основе топографического профиля участка 1 пути определяется лежащий впереди подъем 3 и/или его начало, то перед началом лежащего впереди подъема 3, в данном случае в точке Р1, переменная точка давления таким образом настраивается и устанавливается, что автомобиль движется с регулируемой, предопределенной второй заданной максимальной скоростью, когда водитель устанавливает педаль акселератора, соответственно, на эту точку давления, причем вторая заданная максимальная скорость выше, чем первая заданная максимальная скорость. В примере, проиллюстрированном на фиг.1, высота второй заданной максимальной скорости равна 90 км/час.
На основе измененной точки давления, таким образом, водитель будет устанавливать положение педали акселератора, соответствующее измененной точке давления, так что текущая скорость 5 транспортного средства после точки Р1 повышается от 85 км/час до 90 км/час. Путем выдерживания точки давления водитель может выполнять движение в гору, оптимальное с точки зрения потребления, при котором кинетическая энергия автомобиля целенаправленно используется для по меньшей мере частичного преодоления подъема, чтобы использовать дополнительный маховой момент на подъеме. После въезда на подъем, точка давления предпочтительно вновь возвращается на предыдущее значение, так что фактическая скорость 5 вновь возвращается на значение 85 км/час.
Если в зависимости от топографических данных распознается начало Р3 лежащего впереди участка 4 спуска, то перед началом лежащего впереди участка 4 спуска в точке Р2 через педаль акселератора создается легкое двойное постукивание или двойное пощелкивание. Тем самым водителю своевременно сигнализируется приближающееся начало участка 4 спуска, так что он для улучшенного использования кинетической энергии уже перед спуском 4 может несколько отпустить газ. Если водитель следует этому указанию и уменьшает ход педали акселератора, то скорость 5 уменьшается в области от Р2 до Р3. Непосредственно перед или в начале участка 4 спуска в точке Р3 через функцию силовой обратной связи педали акселератора для водителя создается отчетливо ощущаемая сила реакции, которая предотвращает или по меньшей мере затрудняет то, что водитель через педаль акселератора установит дополнительный момент. Кроме того, создание силы реакции может выполняться таким образом, что оно выполняется с повышением, так что водителю при въезде на спуск с помощью силы реакции указывается на поэтапное отпускание педали акселератора.
Вследствие усилия отбора мощности при движении на склоне участка 4 спуска скорость 5 автомобиля вновь возрастает, не требуя при этом увеличения хода педали акселератора. В случае тяжелых грузовых автомобилей при движении на длинных участках спуска, как известно, существует опасность того, что грузовой автомобиль также без подвода топлива, то есть в режиме без сжигания, за счет отбора мощности при движении на склоне, слишком сильно ускорится выше предопределенной максимальной скорости.
Чтобы предотвратить то, что скорость 5 движения грузового автомобиля превысит предопределенную максимальную скорость, например, 90 км/час, в данном случае используется регулятор скорости торможения (так называемый автомат торможения), который посредством тормозного устройства, предпочтительно посредством тормоза-замедлителя, регулирует скорость 5 автомобиля до заданной скорости автомата торможения 90 км/час, так что она в области между точками Р4 и Р5 не превышается.
Если на основе топографических данных определяется конец Р6 участка 4 спуска, то текущая заданная скорость автомата торможения кратковременно повышается перед концом участка спуска в точке Р5, так что кинетическая и потенциальная энергия автомобиля может использоваться, чтобы замедлить тяговый режим двигателя на следующем участке пути.
Вследствие этого скорость 5 автомобиля в области от Р5 до Р6 возрастает и вновь снижается после прохождения конца Р6 участка спуска. После Р6 трансмиссия грузового автомобиля с автоматизированной коробкой передач или автоматической коробкой передач размыкается. Этим можно управлять посредством предиктивного алгоритма качения, который сокращает потребление топлива за счет режима качения с разомкнутым сцеплением.
Другая возможность способствования оптимизированному по потреблению режиму вождения предусматривает, что во время режима качения с разомкнутым сцеплением в трансмиссии автомобиля и в случае, если текущая скорость больше, чем регулируемое предопределенное пороговое значение скорости, через педаль акселератора создается четко воспринимаемая сила реакции и/или точка давления таким образом, что водитель для замыкания трансмиссии должен осознанно переходить через созданную силу реакции и/или точку давления. Этот вариант предотвращает то, что водитель завершает эффективный по потреблению режим качения по невнимательности и/или случайно путем легкого приведения в действие педали акселератора. Для этого может вычисляться оптимальная для потребления длительность режима качения, так что, например, сила реакции формируется только для вычисленной длительности режима качения. Вычисленный конец режима качения представляет на фиг.1 точка Р7.
Изобретение не ограничено вышеописанными предпочтительными примерами выполнения. Более того, возможно множество вариантов и отклонений, которые также используют идеи изобретения и поэтому входят в объем защиты. В частности, изобретение также испрашивает охрану для объекта и признаков зависимых пунктов, независимо от пунктов, на которые они ссылаются.
ПЕРЕЧЕНЬ ССЫЛОЧНЫХ ПОЗИЦИЙ
1 участок пути
2 плоский участок пути
3 подъем
4 участок спуска
5 фактическая скорость автомобиля
Группа изобретений относится к способу управления регулируемой восстанавливающей силой на педали акселератора грузового автомобиля и автомобилю. Автомобиль содержит педаль акселератора с силовой обратной связью и систему управления для педали акселератора с силовой обратной связью. В соответствии со способом, для управления регулируемой восстанавливающей силой на педали акселератора автомобиля, особенно грузового автомобиля, восстанавливающая сила, действующая на педаль акселератора, может регулироваться переменным образом в зависимости от топографических данных. Обеспечивается оптимизация режима эксплуатации автомобиля. 2 н. и 7 з.п. ф-лы, 1 ил.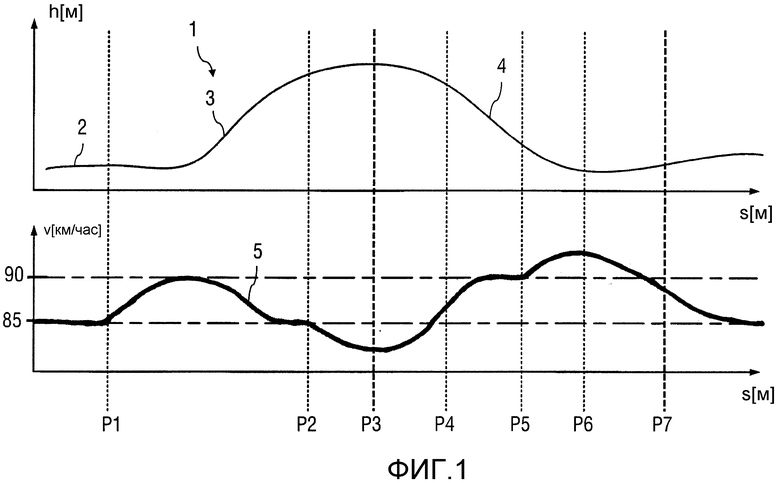
1. Способ управления регулируемой восстанавливающей силой на педали акселератора автомобиля, особенно грузового автомобиля, причем восстанавливающую силу, действующую на педаль акселератора, регулируют переменным образом в зависимости от топографических данных.
2. Способ по п.1, отличающийся тем, что в зависимости от топографических данных для лежащего впереди участка пути определяют места на лежащем впереди участке пути, в которых водителю посредством изменения восстанавливающей силы, действующей на педаль акселератора, указывают на заданный режим вождения и/или заданную максимальную скорость.
3. Способ по п.1 или 2, отличающийся тем, что при движении в плоскости переменную точку давления педали акселератора, соответственно, регулируют таким образом, что автомобиль двигается с регулируемой, предопределенной первой заданной максимальной скоростью, если водитель устанавливает педаль акселератора, соответственно, на точку давления.
4. Способ по п.3, отличающийся тем, что в зависимости от топографических данных определяют начало лежащего впереди подъема, и перед началом лежащего впереди подъема переменную точку давления регулируют таким образом, что автомобиль движется с регулируемой предопределенной второй заданной максимальной скоростью, если водитель устанавливает педаль акселератора, соответственно, на точку давления, причем вторая заданная максимальная скорость выше, чем первая заданная максимальная скорость.
5. Способ по любому из пп.1, 2 или 4, отличающийся тем, что в зависимости от топографических данных определяют начало лежащего впереди участка спуска.
6. Способ по п.5, отличающийся тем, что
а) посредством изменения восстанавливающей силы, воздействующей на педаль акселератора, водителю передают первый сигнал, когда автомобиль находится на первом расстоянии перед началом лежащего впереди участка спуска; и
b) посредством изменения восстанавливающей силы, воздействующей на педаль акселератора, водителю передают второй сигнал, когда автомобиль находится на втором расстоянии перед или после начала лежащего впереди участка спуска, причем второе расстояние меньше, чем первое расстояние.
7. Способ по п.6, отличающийся тем,
а) что для формирования первого сигнала восстанавливающую силу, воздействующую на педаль акселератора, изменяют таким образом, что педаль акселератора формирует сигнал постукивания или пощелкивания, предпочтительно сигнал двойного постукивания или двойного пощелкивания; и/или
b) что для формирования второго сигнала воспринимаемую силу реакции формируют таким образом, что водитель посредством педали акселератора не может запрашивать дополнительный момент или для этого должен осознанно переходить через силу реакции; и/или
с) что второе расстояние выбирают таким образом, что второй сигнал формируется в начале участка спуска или непосредственно перед или непосредственно после начала участка спуска.
8. Способ по п.1, отличающийся тем, что во время режима качения с разомкнутым силовым замыканием в трансмиссии автомобиля и, если текущая скорость больше, чем устанавливаемое заданное пороговое значение скорости, посредством педали акселератора формируют отчетливо воспринимаемую силу реакции и/или точку давления, так что водитель для замыкания трансмиссии должен осознанно перейти через сформированную силу реакции и/или точку давления.
9. Автомобиль, особенно грузовой автомобиль, содержащий педаль акселератора с силовой обратной связью и систему управления для педали акселератора с силовой обратной связью, которая выполнена таким образом, чтобы выполнять способ согласно любому из предыдущих пунктов.
| УСТРОЙСТВО ОБРАТНОЙ СВЯЗИ ОБ УКЛОНЕ | 2009 |
|
RU2477690C2 |
| DE 102011081071 A1, 21.02.2013 | |||
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ РЕЖИМА РАСХОДА ТОПЛИВА | 2007 |
|
RU2436163C2 |
| DE 102012213321 A1, 30.01.2014. | |||

