Изобретение относится к способу и устройству обнаружения изменения поведения водителя автотранспортного средства. В данном случае поведение водителя представляет собой его поведенческое состояние, от которого могут зависеть его действия, иначе говоря, его реагирование на внешние события. Как правило, состояние высокой бдительности проявляется в способности, в частности, упреждать эти события и действовать быстро, плавно и эффективно. Состояние усталости, рассеянности или нервности приводит к снижению этих способностей водителя, что может отразиться с точки зрения последствий на других пассажирах и даже может привести к дорожно-транспортным происшествиям.
Следовательно, обнаружение изменения поведения водителя необходимо, чтобы предупредить водителя и даже воздействовать напрямую на транспортное средство. Конструкторы автомобилей предусмотрели такую потребность и предложили способы и устройства для ее обеспечения, которые, тем не менее, не являются вполне удовлетворительными.
Способы обнаружения снижения бдительности водителя можно разделить на две большие группы, первая из которых представляет собой подход, основанный на прямых измерениях, а вторая является опосредованным подходом.
В решении, основанном на прямых измерениях, можно указать:
- измерения физиологического состояния водителя: частота сердечных сокращений (электрокардиограмма), датчики мозговой активности (в том числе электроэнцефалограмма), электроокулограмма, как указано, например, в документе ЕР0699413;
- измерения поведения водителя, основанные на наблюдении за водителем: моргание глаз (PERCLOS характеризует степень открывания и закрывания глаз), ориентация и движение головы, положение тела водителя на сидении, как указано, например, в документе ЕР2368496;
- измерения реакции водителя на заранее запрограммированное событие, как указано, например, в документах ЕР1957309 или ЕР2512340.
Подход, основанный на прямых измерениях, имеет ряд недостатков, например, состоящих в необходимости установки дополнительных приборов на транспортном средстве, которые иногда являются сложными и дорогими, или приборов, которые могут быть интрузивными по отношению к личности водителя.
Подход, основанный на опосредованных измерениях, позволяет избегать недостатков первого подхода. В частности, можно указать:
- измерения действий водителя на транспортное средство: угол поворота рулевого колеса, крутящий момент на рулевом колесе, нажатие педали акселератора, тормоза, сцепления и переключение передачи, вторичные действия на указатели поворота, аудио-интерфейс человек-машина, навигация, телефонная связь без помощи рук, кондиционирование, - при этом способ и устройство не оказывают специального воздействия на водителя, как указано, например, в документах US8593288 или US6061610;
- измерения динамики транспортного средства: дистанция между транспортными средствами, скорость транспортного средства, положение транспортного средства на полосе движения, курсовой угол, как указано, например, в документе ЕР0952039.
Изобретение отдает предпочтение именно этому второму подходу.
В этом втором подходе, как правило, необходимо использовать набор параметров, который регулируют раз и навсегда в транспортном средстве во время фазы доводки транспортного средства, причем независимо от условий эксплуатации и от типа водителя.
Трудность применения известных до сих пор способов в рамках второго подхода заключается в том, чтобы найти нормальный набор параметров для регулировки, позволяющий обнаруживать снижение бдительности водителя во многих самых разных ситуациях, например, связанных с типом водителя и с типом вождения, с изменениями дорожной конфигурации (магистраль/ дорога местного значения, плотный/неплотный трафик) и с изменениями характеристик транспортного средства. Компромисс, необходимый для удовлетворения максимума возможных ситуаций, приводит к невозможности нахождения нормального регулировочного набора параметров в каждой предусмотренной ситуации и тем более для ситуаций, которые могут возникать неожиданно или для которых при конструировании и при последующих испытаниях могут отсутствовать все необходимые элементы.
Для преодоления недостатков известных технических решений изобретением предложен способ обнаружения изменения поведения водителя автотранспортного средства при помощи кибернетической модели, образованной первым вектором измерения, связанным по меньшей мере с одним входом, соединенным с измерительным инструментом, для количественного определения сенсомоторных данных, связанных с водителем, вектором выхода, содержащим по меньшей мере один выход, для оценки данных действия, производимого водителем, вектором параметризации, содержащим по меньшей мере один параметр для количественного определения физиологических данных водителя, отличающийся тем, что содержит следующие этапы, осуществляемые в реальном времени:
- вычисляют по меньшей мере одно оптимальное текущее значение увеличенного вектора состояния на данный момент в зависимости от по меньшей мере одного ранее оцененного значения указанного увеличенного вектора состояния и от второго вектора измерения, связанного с указанным вектором выхода, при этом указанный увеличенный вектор состояния содержит по меньшей мере одну составляющую, воспроизводящую составляющую вектора временного состояния, и по меньшей мере одну составляющую, воспроизводящую составляющую вектора параметризации;
- оценивают степень стабильности по меньшей мере одной составляющей текущего значения увеличенного вектора состояния, которая воспроизводит указанную по меньшей мере одну составляющую вектора параметризации;
- сигнализируют об изменении поведения водителя, когда указанная степень стабильности свидетельствует о нестабильности.
Кибернетическая модель водителя в комбинации с идентификацией в реальном времени параметров модели водителя обеспечивает диагностику водителя (в частности, рассеянности), адаптированную к каждому водителю и к каждой конфигурации управляемого им транспортного средства.
Изменение в течение времени значения этих параметров или скорость изменения значений параметров модели дают представление об изменении поведения водителя (в частности, о рассеянности) и, в меньшей степени, об изменении состояния дороги.
По сравнению с классическим методом идентификации, таким как методы, раскрытые в литературе, например, метод предсказания ошибки РЕМ (Prediction Error Method), метод, предложенный изобретением, позволяет идентифицировать моментальное значение параметра. Следовательно, диагностику можно получать за очень короткий шаг времени (в реальном времени) в отличие от метода РЕМ, который требует наблюдения сигналов за очень длительный интервал времени. Преимуществом является получение результатов, более приближенных к реальности, так как поведение водителя, связанное со значением параметров модели, изменяется за очень короткие шаги времени.
Идентификация в реальном времени позволяет производить диагностику, более точно отражающую быструю динамику изменения поведения водителя.
В частности, способ содержит этапы, осуществляемые в реальном времени, для вычисления коэффициента усиления байесовского фильтра на основании ранее оцененного значения указанного увеличенного вектора состояния и указанного вектора измерения, при этом коэффициент усиления байесовского фильтра представляет собой техническое средство вычисления текущего значения увеличенного вектора состояния.
Предпочтительно способ содержит следующие этапы, осуществляемые в реальном времени:
- генерируют первую предиктивную совокупность сигма-точек, связанных с увеличенным вектором состояния, сосредоточенных вокруг ранее оцененного значения указанного увеличенного вектора состояния, при помощи предиктивной ковариационной матрицы статистически возможных состояний;
- вычисляют вторую предиктивную совокупность сигма-точек, связанных с вектором выхода в данный момент, в зависимости от первой предиктивной совокупности сигма-точек и от указанного вектора измерения;
- вычисляют коэффициент усиления байесовского фильтра на основании второй предиктивной совокупности сигма-точек.
В частности, способ содержит этапы, осуществляемые в реальном времени, для вычисления будущего оценочного значения указанного увеличенного вектора состояния в следующий момент на основании оптимального текущего значения указанного увеличенного вектора состояния и указанного первого вектора измерения.
Предпочтительно способ содержит следующие этапы, осуществляемые в реальном времени:
- генерируют первую оптимальную совокупность сигма-точек, связанных с увеличенным вектором состояния, сосредоточенных вокруг оптимального текущего значения указанного увеличенного вектора состояния, при помощи оптимальной ковариационной матрицы статистически возможных состояний;
- вычисляют вторую оптимальную совокупность сигма-точек, связанных с увеличенным вектором состояния в данный момент, в зависимости от первой оптимальной совокупности сигма-точек и от указанного вектора измерения;
- вычисляют будущее оценочное значение указанного вектора на основании второй оптимальной совокупности сигма-точек.
Предпочтительно, чтобы оценить указанную степень стабильности, способ содержит следующие этапы:
- получают значение вектора параметризации на основании увеличенного вектора состояния в данный момент;
- вычисляют изменение параметров на основании значения в данный момент и значения в предыдущий момент вектора параметризации;
- в сдвиговом регистре сохраняют указанное изменение параметров таким образом, чтобы получить количество предшествующих изменений параметров;
- вычисляют типовое отклонение на указанном количестве изменений;
- отмечают нестабильность указанной степени стабильности, если указанное типовое отклонение не находится ниже заранее определенного порога.
Объектом изобретения является также компьютерная программа, содержащая командные коды программы для осуществления этапов способа, когда указанную программу исполняет компьютер.
Объектом изобретения является также устройство обнаружения изменения поведения водителя автотранспортного средства, содержащее блок пост-обработки, соединенный с одним или несколькими измерительными инструментами, для количественного определения одной или нескольких сенсомоторных данных, связанных с водителем, блок вычисления, соединенный с блоком пост-обработки и находящийся в бортовом компьютере, который содержит записанную в памяти кибернетическую модель, образованную вектором измерения, содержащим по меньшей мере один вход, вектором выхода, содержащим по меньшей мере один выход, для оценки данной действия, производимого водителем, вектором параметризации, содержащим по меньшей мере один параметр для количественного определения физиологической данной водителя, и вектором временного состояния, содержащим по меньшей мере одно временное состояние указанной модели, отличающееся тем, что содержит в памяти заявленную программу и процессор для исполнения в реальном времени указанной программы.
Объектом изобретения является также транспортное средство, содержащее заявленное устройство.
Изобретение будет более понятно из примеров осуществления способа и выполнения устройства в соответствии с изобретением, представленных со ссылками на прилагаемые чертежи, на которых:
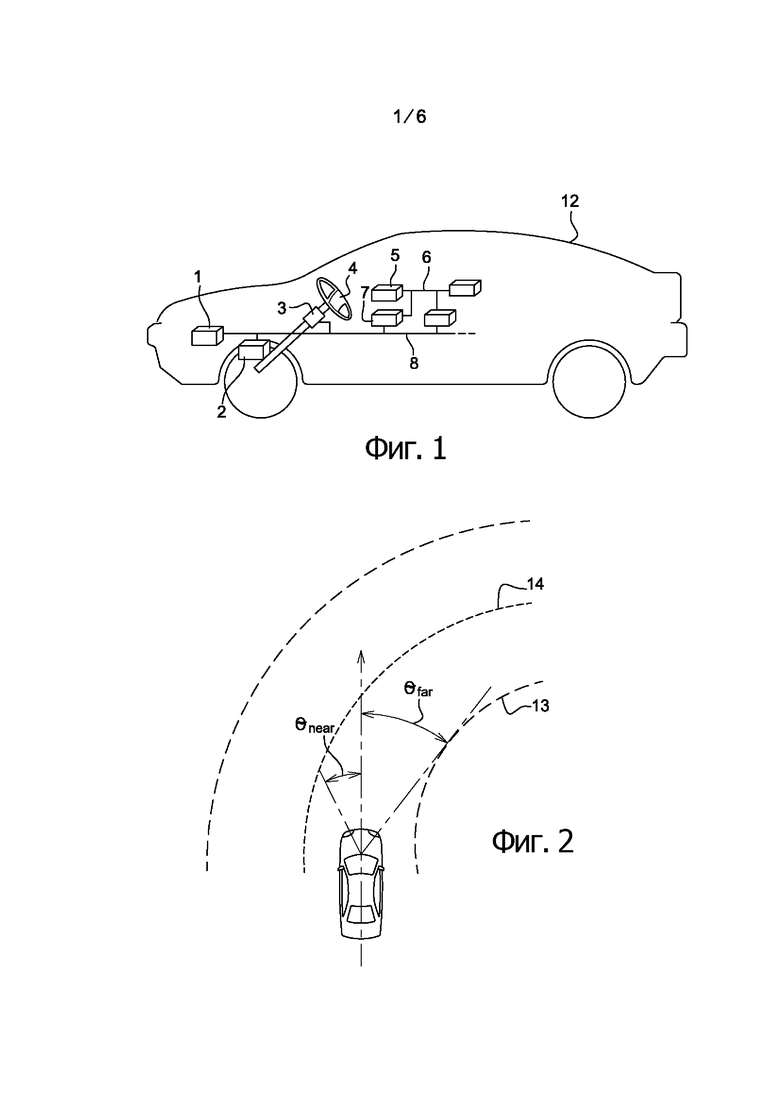
фиг. 1 - вид транспортного средства, к которому можно применить изобретение;
фиг. 2 - схематичный вид транспортного средства, показанного на фиг. 1, которое движется по дороге;
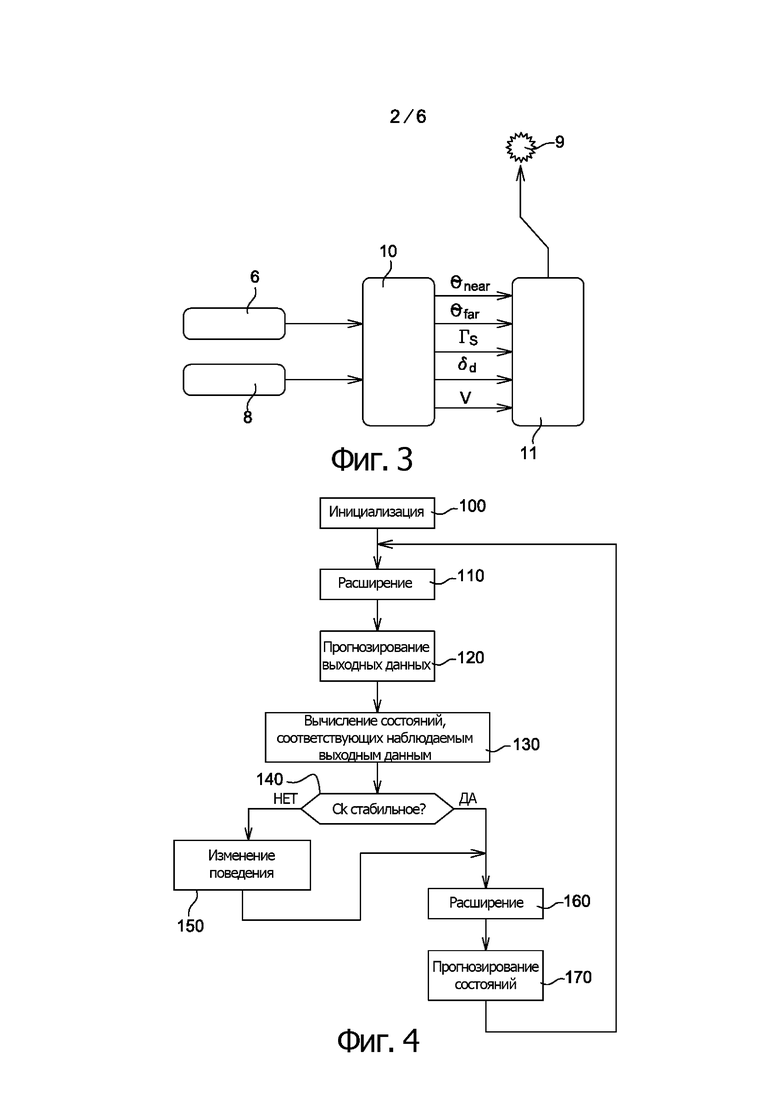
фиг. 3 - схематичный вид устройства в частном варианте выполнения изобретения;
фиг. 4 - блок-схема этапов заявленного способа;
фиг. 5 - кибернетическая модель водителя;
фиг. 6-8 - детализированные этапы возможного осуществления заявленного способа.
На фиг. 1 показано транспортное средство 12, как известно, оснащенное различными датчиками и не показанными приводами для вождения транспортного средства. Одна или несколько камер, соединенных с бортовым вычислительным устройством 5, позволяют наблюдать за окружающей средой транспортного средства, сравнимой с окружающей средой, которую может наблюдать водитель через окна транспортного средства, или помогают водителю при помощи изображений среды, которую он не может наблюдать напрямую. Бортовое вычислительное устройство 5 соединено с другими вычислительными устройствами при помощи шины 6 типа CAN, LIN, Ethernet или любого другого типа, известного в области бортовых сетей. Бортовое вычислительное устройство 1 контролирует и управляет различными приводами, например, такими как силовая установка и тормоза, связанные с педалью акселератора и педалью тормоза в распоряжении водителя и/или с датчиками скорости, установленными на всех или на части колес 21, 22 транспортного средства. Бортовое вычислительное устройство 7, часто называемое бортовым компьютером, соединено с бортовым вычислительным устройством 1 и с другими вычислительными устройствами и датчиками при помощи шины 8, часто называемой шиной транспортного средства, типа CAN, LIN, Ethernet или любого другого типа, известного в области бортовых сетей. Среди сигналов датчиков, передаваемых через шину 8, можно указать скорость v транспортного средства, измеряемую при помощи датчика или датчиков скорости 2, угол поворота δd и крутящий момент Γd, прикладываемый водителем к рулевому колесу 4.
Заявленное устройство обнаружения изменения поведения водителя транспортного средства 12 касается, в частности, автотранспортного средства в том смысле, что поведение водителя имеет прямое влияние на поведение транспортного средства. Этим транспортным средством может быть как водное или воздушное транспортное средство, так и наземное транспортное средство.
Когда транспортное средство 12 перемещается, например, по дороге, водитель обычно оценивает ближний угол обзора θnear и дальний угол обзора θfar, как показано на фиг. 2. Ближний угол обзора является углом поля зрения, под которым водитель обычно воспринимает центральную линию 14 шоссе. Дальний угол обзора является углом между касательной к линии направления транспортного средства и касательной к внутренней кривизне 13 шоссе. Когда шоссе является прямолинейным, касательная к внутренней кривизне 13, естественно, направлена в бесконечность к исчезающей точке краев шоссе. В целом, дальний угол обзора θfar соответствует раннему обнаружению водителем внутренней кривизны 13 шоссе, и ближний угол обзора θnear соответствует контролю бокового положения водителем, отталкивающимся от ближней точки.
Устройство обнаружения изменения поведения водителя согласно примеру выполнения изобретения, показанному на фиг. 3, находится централизованно в бортовом вычислительном устройстве 7 или распределено в нескольких вычислительных устройствах 1, 5, 7.
В частности, устройство содержит блок 10 пост-обработки, соединенный с шинами 6, 8, чтобы считывать с них сигналы, поступающие от датчиков 2, 3 и от камеры, с целью построения вектора U входных измерений и вектора Z выходных измерений, связанных с кибернетической моделью, которая будет описана ниже со ссылками на фиг. 5. Можно напомнить, что в рамках информационной обработки вектор измерений представляет собой упорядоченный список переменных, значение каждой из которых устанавливают на основании шины данных или напрямую на основании датчика. Устройство содержит также блок 11 вычисления, соединенный с блоком 10 пост-обработки для получения вектора U входных измерений и вектора Z выходных измерений, чтобы генерировать тревожный сигнал 9 в звуковом, визуальном виде или в виде сообщения для предупреждения об изменении поведения водителя.
Блок 11 вычисления находится, например, но не обязательно в бортовом вычислительном устройстве или компьютере 7, который содержит процессор и записанную в памяти программу и данные для осуществления этапов способа, описанных ниже, в частности, со ссылками на фиг. 4. Данные входной-выходной переменной используются для воспроизведения в реальном времени вектора U входных измерений и вектора Z выходных измерений. Данные внутренней переменной в программе используются для временного запоминания значений, необходимых для осуществления этапов, в каждый момент k или в определенном интервале времени. Постоянные данные в ней используются для постоянного хранения постоянных значений, необходимых для осуществления этапов, в частности, этапа инициализации 100.
На фиг. 5 в качестве не ограничительного примера показана возможная кибернетическая модель водителя, основанная на знании сенсомоторных функций человека. Представленная в данном случае кибернетическая модель содержит четыре входа и главный выход. Входными данными являются: момент автосовмещения Γs, отображающий момент, с которым передний мост действует на рулевую колонку, угол поворота δd руля, дальний угол обзора θfar спереди транспортного средства и ближний угол обзора θnear спереди транспортного средства. Эти данные воспринимаются водителем, чтобы действовать на транспортное средство в зависимости от его поведения. Устройство обнаружения изменения поведения водителя, в частности, блок 11 вычисления получает эти же данные на основании измерений в реальном времени, как указано в связи с фиг. 3. На главном выходе момент Γd водителя является моментом сил, который водитель может прикладывать к рулевому колесу в зависимости от входных данных, которые он предположительно должен воспринимать. Кроме того, устройство обнаружения изменения поведения водителя может получать в реальном времени значение измерения момента сил, которым водитель действительно действует на рулевое колесо, как указано в связи с фиг. 3.
В варианте выполнения устройства обнаружения рассеянности водителя в качестве вспомогательного выхода можно также добавить угол намерения δsw, на который водитель намеревается повернуть рулевое колесо, чтобы найти стабилизирующие параметры во время фазы идентификации.
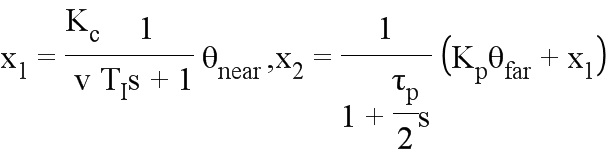
Показанная на фиг. 5 внутренняя структура кибернетической модели в основном включает в себя четыре модуля. Модуль 20 моделирует визуальное упреждение в точке касания траектории путем умножения угла θfar на пропорциональный коэффициент усиления Кр. Модуль 21 моделирует визуальную компенсацию в целевой точке перед транспортным средством путем деления угла θnear на моментальную скорость транспортного средства и путем его умножения на пропорциональный коэффициент усиления Кс с константой времени TI. Модуль 22 вводит временную задержку в сумму результатов, полученных на выходе модулей 20 и 21, чтобы интегрировать задержку обработки τp человеческим мозгом, с целью получения угла намерения δsw, на который водитель намеревается повернуть рулевое колесо. Модуль 23 моделирует нейромышечную систему человека, которая преобразует заданное значение, полученное во время предыдущих обработок, в сигнал момента Гd с учетом проприоцептивных ответов, которыми являются момент автосовмещения Γs и угол δd поворота руля.
В частности, модуль 23 получает картину полезного момента сил, необходимого для достижения значения угла намерения δsw водителя, путем сложения двух членов. Первый член соответствует значению угла намерения δsw водителя, умноженному на скорость v транспортного средства и на коэффициент пропорциональности Kt. Второй член соответствует отклонению между значением угла намерения δsw водителя и углом δd поворота руля, отслеживаемым в каждый момент в режиме реального времени, умноженному на коэффициент пропорциональности Kt. При этом момент автосовмещения Γs вычитают из полезного момента сил, чтобы получить разность моментов сил, которая равна сигналу момента Гd с учетом константы времени Tn.
Параметры Kp Kc T1 τp Kr Kt Tn модели объединены в памяти в векторе Π = [Kp Kc T1 τp Kr Kt Tn], который характеризует физиологическое поведение водителя. Вышеупомянутые значения параметров, как правило, являются постоянными для рассматриваемого водителя, поведение которого они определяют количественно. Любое отмечаемое изменение одного или нескольких значений этих параметров отображает изменение поведения водителя, иначе говоря, изменение его реагирования на события. Изменение поведения может стать результатом снижения бдительности, связанного, например, с усталостью, с отвлечением внимания по причине присутствии рекламного щита, телефонного звонка или поиска радиостанции. Изменение поведения может также стать результатом адаптации к особым условиям движения, например, связанным с плохим состоянием дорожного покрытия. Признак изобретения состоит в определении вектора Пk параметризации с переменным значением в каждый момент k осуществления способа. Блок 11 вычисления может содержать в памяти по умолчанию постоянное значение П0 вектора параметризации модели, соответствующее, например, усредненным значениям параметров, предварительно полученным для репрезентативной выборки водителей.
Задачей заявленного устройства обнаружения рассеянности водителя состоит в обнаружении этого возможного изменения поведения водителя. Для этого устройство обнаружения создает описанную выше модель при помощи вектора состояния x = [x1 x2 x3]T. Каждая составляющая вектора состояния x(t) в момент t имеет значение переменной временного состояния модели:
 и
и

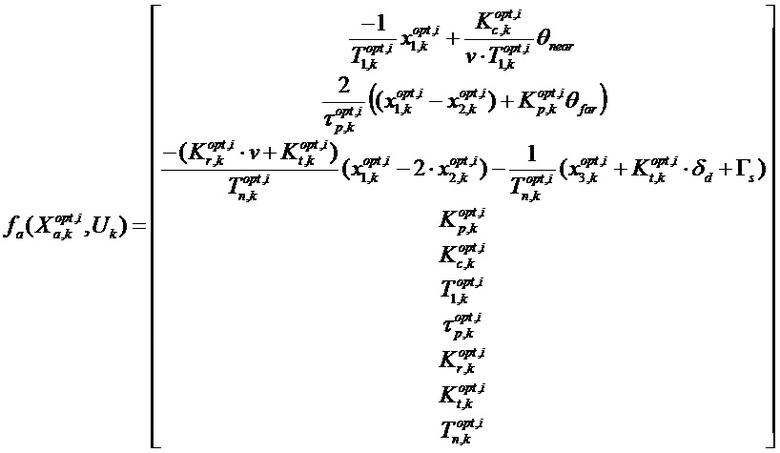
Следует напомнить, что математическое описание модели, показанной на фиг. 5, или любой другой кибернетической модели можно осуществить, рассматривая линейное отображение формы:
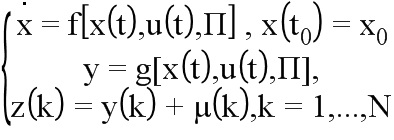
где x = [x1 x2 x3]T является вектором состояния с первоначальным значением х0 в t = t0. Векторы входа и соответственно выхода модели u = [θfar θnear Γs δd]T и y = [Γd δsw]T отображают соответственно вектор входов и вектор выходов, Π = [Kp Kc T1 τp Kr Kt Tn] является вектором рассматриваемых, в данном случае неизвестных параметров модели или, иначе говоря, параметров, для которых необходимо идентифицировать значения. Реальные функции f и g дают соответственно, с одной стороны, производную  вектора состояния по отношению к времени, если параметры считаются постоянными, и, с другой стороны, оценочное значение у на выходе модели. Вектор z выходов, измеряемых в каждый период дискретизации, при котором k является индексом дискретного времени, учитывает шум измерения с вариационной-ковариационной матрицей R. Чтобы упростить описание, ковариационной матрицей будет называться любая матрица вариации-ковариации с учетом того, что на диагонали матрицы ковариация выражает вариацию. Матрица R или Ra является матрицей с не меняющимися во времени коэффициентами.
вектора состояния по отношению к времени, если параметры считаются постоянными, и, с другой стороны, оценочное значение у на выходе модели. Вектор z выходов, измеряемых в каждый период дискретизации, при котором k является индексом дискретного времени, учитывает шум измерения с вариационной-ковариационной матрицей R. Чтобы упростить описание, ковариационной матрицей будет называться любая матрица вариации-ковариации с учетом того, что на диагонали матрицы ковариация выражает вариацию. Матрица R или Ra является матрицей с не меняющимися во времени коэффициентами.
Если рассматривать переменные состояния, относящиеся к модели на фиг. 5:
и
Производная переменных состояния позволяет получить аналитическое выражение функции f:
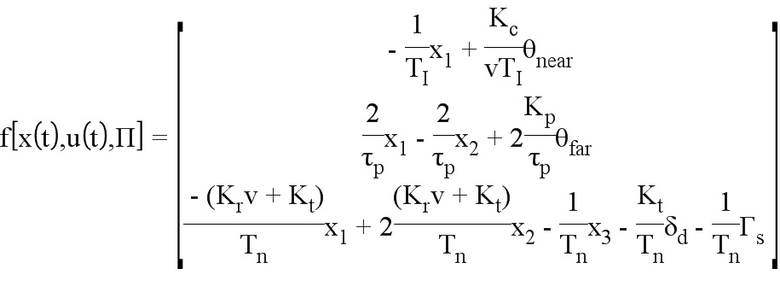 ;
;
На основании структуры модели, показанной на фиг. 5, и определенных выше переменных состояния выходы модели можно оценить следующим образом:
Γd = x3 и δsw = -x1 + 2x2 - Kpθfar
Аналитическое выражение функции g выводят из уравнений выходов:
 =
=
В математических напоминаниях, представленных выше для лучшего понимания дальнейшего описания, предполагается, что вектор П параметров является известным и постоянным. Таким образом, на основании модели, показанной на фиг. 5, образована линейная по своим параметрам базовая система. Она служит для оценки вектора состояния x = [x1 x2 x3]T, из которого выводят оценки измерений. Система, выработанная в данном случае на основании конкретной кибернетической модели, которая, впрочем, сама по себе не является частью изобретения, будет, разумеется, другой для другой кибернетической модели с другим числом входов, другим числом параметров, другим числом состояний и другим числом выходов. Изобретение можно также применять для простого ПИД-регулятора (пропорционально-интегрально-дифференциального регулятора).
Дискретизацию с периодом дискретизации Т осуществляют просто при помощи метода Эйлера; если взять xk = x(kT):
где 
Чтобы оценить также вектор П параметров, изобретение преобразует базовую систему, например, вышеупомянутую базовую систему, в увеличенную систему.
Увеличенную систему, связанную с применением модели, получают путем увеличения размера вектора состояния Х базовой системы с новыми переменными состояния, извлеченными из вектора состояния Π = [Kp Kc T1 τp Kr Kt Tn]T
 ;
;  где
где  (переменные состояния первоначальной системы)
(переменные состояния первоначальной системы)
xa = [x1 x2 x3 Kp Kc T1 τp Kr Kt Tn]T;
Если считать, что вектор параметров П меняется лишь незначительно, динамику увеличенной системы можно представить в виде следующих уравнений:
0(7,1) символически обозначает вектор с семью нулевыми составляющими
 и
и
где μa обозначает шум измерения увеличенной системы с ковариацией Ra. Таким образом, мы получили элементы модели, необходимые для осуществления способа, описание которого следует ниже со ссылками на фиг. 4.
На этапе 100 инициализации для первоначального момента с индексом k=0 постоянные значения, записанные в памяти, связывают с внутренними переменными способа, которые будут меняться в каждый последующий момент k.
Значение 
Значение Pa_k+1 увеличенной ковариационной матрицы предсказания состояния системы в момент k+1, в частности, в рамках статистики 2 порядка, инициализируют при помощи формулы Pa_k+1 = Pa_0, где Pa_0 является матрицей с LxL составляющими, которые, например, все равны 0,1 на диагонали, если не считать одного или двух исключений, основанных на опыте, и которые все являются нулевыми за пределами диагонали.
Значение Ra_k увеличенной ковариационной матрицы шума измерения инициализируют при помощи формулы Ra_k = Ra_0, где, для выходного вектора с двумя составляющими, Ra_0 является матрицей с 2х2 составляющими, которые, например, все имеют значение ниже 0,001 на диагонали, исходя из опыта и/или спецификаций измерительных инструментов, и которые все являются нулевыми за пределами диагонали. Для увеличенной ковариационной матрицы шума измерения можно также взять постоянное значение Ra, которое можно найти непосредственно в памяти в ходе осуществления этапов и которое можно не устанавливать на этапе инициализации.
Другие величины, которые сохраняют постоянное значение в течение времени, просто записаны в постоянной памяти и не требуют инициализации на этапе 100. Число L составляющих увеличенного вектора состояния равно сумме временных состояний кибернетической модели и числа добавленных параметров модели. Масштабный множитель λ был определен эвристически, чтобы оптимизировать время вычисления, в частности, с точки зрения схождения, при этом выбранным значением является λ=3-L, но не выходя за рамки изобретения, можно выбрать и другие значения λ. Масштабный множитель λ служит, кроме всего прочего, но не только, как будет показано ниже, для вычисления весовых коэффициентов 
При i=0, 
Фактор забывчивости М является положительной константой, которая выражает число учитываемых предшествующих итераций и которую используют для усиления уверенности в предсказаниях.
Добавление параметров в увеличенный вектор состояния может привести, если не считать редких исключений, к введению нелинейностей в увеличенную систему, в частности, в вышеупомянутую систему по причине неизбежных умножений.
Этап расширения 110 решает проблему нелинейности за счет использования метода вычисления в сочетании со статистикой, связанной со случайной переменной, подвергающейся нелинейным изменениям, известного под названием преобразования “Unscented” или ансцентного преобразования, возможно, в силу своего эфемерного характера. Можно обойтись без этапа 110, если добавление параметров модели к временным состояниям модели для получения увеличенного вектора состояния сохраняет линейную обработку.
Увеличенный вектор состояния рассматривается на этапе 110 как случайная переменная Ха размером L, средней величиной  и с ковариацией Ра, которая претерпевает нелинейное преобразование формы Y = g(Xa). Ансцентное преобразование позволяет приблизить среднюю величину
и с ковариацией Ра, которая претерпевает нелинейное преобразование формы Y = g(Xa). Ансцентное преобразование позволяет приблизить среднюю величину  , ковариацию Руу к Y, а также кросс-ковариацию Рху к Ха и к Y.
, ковариацию Руу к Y, а также кросс-ковариацию Рху к Ха и к Y.
Этап 110 можно разделить на три этапа 111, 112, 113.
Этап 111 в основном состоит в придании в момент k, текущим значениям  предсказанного увеличенного вектора состояния и
предсказанного увеличенного вектора состояния и 


На этапе 112 в основном определяют корень Σ из
Этап 113 в основном заключается в создании совокупности из 2L+1 точек, называемых сигма-точками, в пространстве размером L.
Координатами центральной сигма-точки 





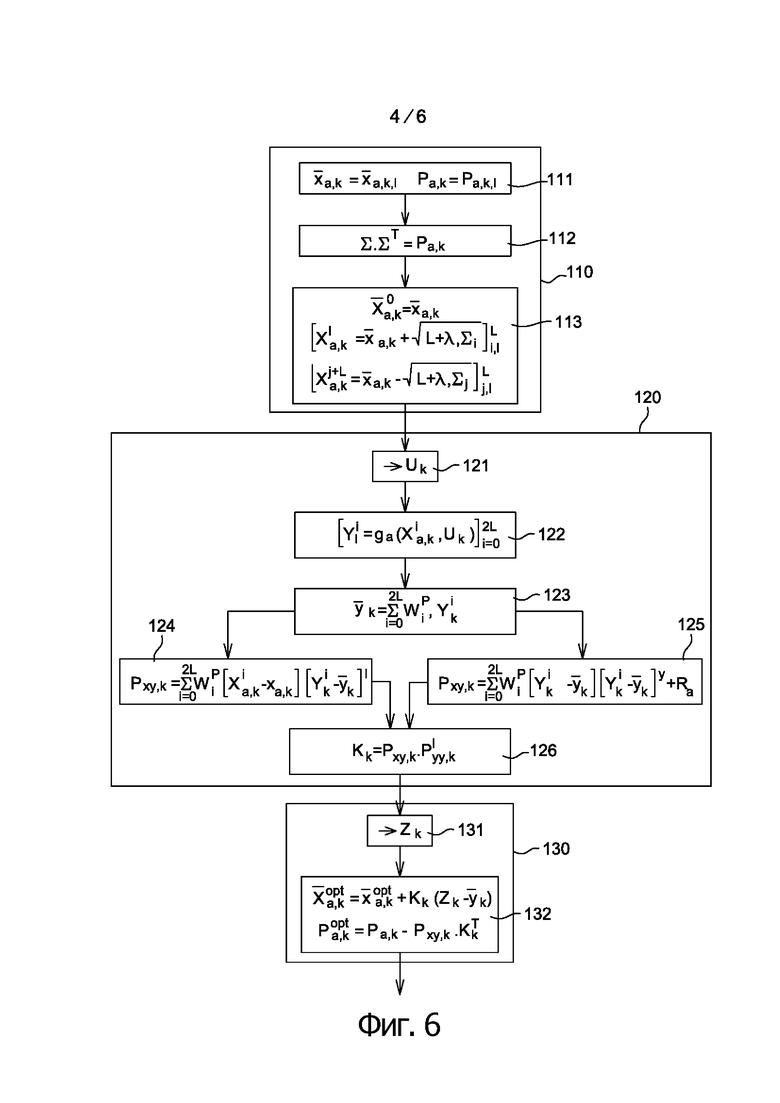
Прогнозируемую совокупность сигма-точек, созданную на этапе 110, используют на этапе 120 для получения коэффициента усиления байесовского фильтра, в частности, фильтра Калмана Kk, в текущий момент k. Можно также использовать другие фильтры, например, такие как сажевые фильтры.
Этап 120 можно подразделить на шесть этапов 121, 122, 123, 124, 125, 126.
Этап 121 состоит в основном в считывании вектора Uk входов модели, реально измеренных в текущий момент k.
На этапе 122 каждую сигма-точку 

В примере, проиллюстрированном кибернетической моделью на фиг. 5:





Число Q составляющих вектора выхода в данном случае равно 2, так как в примере, проиллюстрированном кибернетической моделью на фиг. 5, наблюдают два скалярных выхода, которыми являются момент Гd, прикладываемый водителем к рулевому колесу, и угол δsw, на который водитель намеревается повернуть рулевое колесо. Число Q составляющих вполне может отличаться от 2, что не выходит за рамки изобретения. Число Q меньше 2, если наблюдают только момент Гd, прикладываемый водителем к рулевому колесу. Число Q больше 2, если наблюдают не только момент Гd, прикладываемый водителем к рулевому колесу, и угол δsw, на который водитель намеревается повернуть рулевое колесо, но также другие действия водителя, такие как нажатие на педаль акселератора и т.д.
На этапе 123 генерируют оценочное значение 



Таким образом, первая прогнозируемая совокупность 





Выходные значения 

Что касается любого из этапов 124, 125, то для каждой точки первой прогнозируемой совокупности сигма-точек генерируют вектор отклонения состояния 



На этапе 124 каждое произведение вектора отклонения состояния на результат транспонирования соответствующего вектора отклонения выхода дает матрицу с L строками и Q столбцами. Сумма полученных таким образом 2L+1 матриц, взвешенная при помощи коэффициентов 
На этапе 125 каждое произведение вектора отклонения выходов на результат транспонирования соответствующего вектора отклонения выхода дает матрицу с Q строками и Q столбцами. При этом кросс-ковариационную матрицу Ra шума измерения выходов добавляют к сумме полученных таким образом 2L+1 матриц, взвешенной при помощи коэффициентов
На этапе 126 генерируют значение коэффициента усиления фильтра Калмана Kk в момент k, умножив кросс-ковариационную матрицу
На этапе 130 увеличенный вектор состояния приводят к оптимизированному значению, чтобы получить реально измеренные выходные значения, при этом используют коэффициент усиления фильтра Калмана, генерированный на этапе 120. Этап 130 можно разделить на два этапа 131, 132.
Этап 131 в основном заключается в считывании вектора zk выходов модели, которые были действительно измерены в текущий момент k.
На этапе 132 разность в момент k между вектором zk измеренных выходов и оценочным значением 



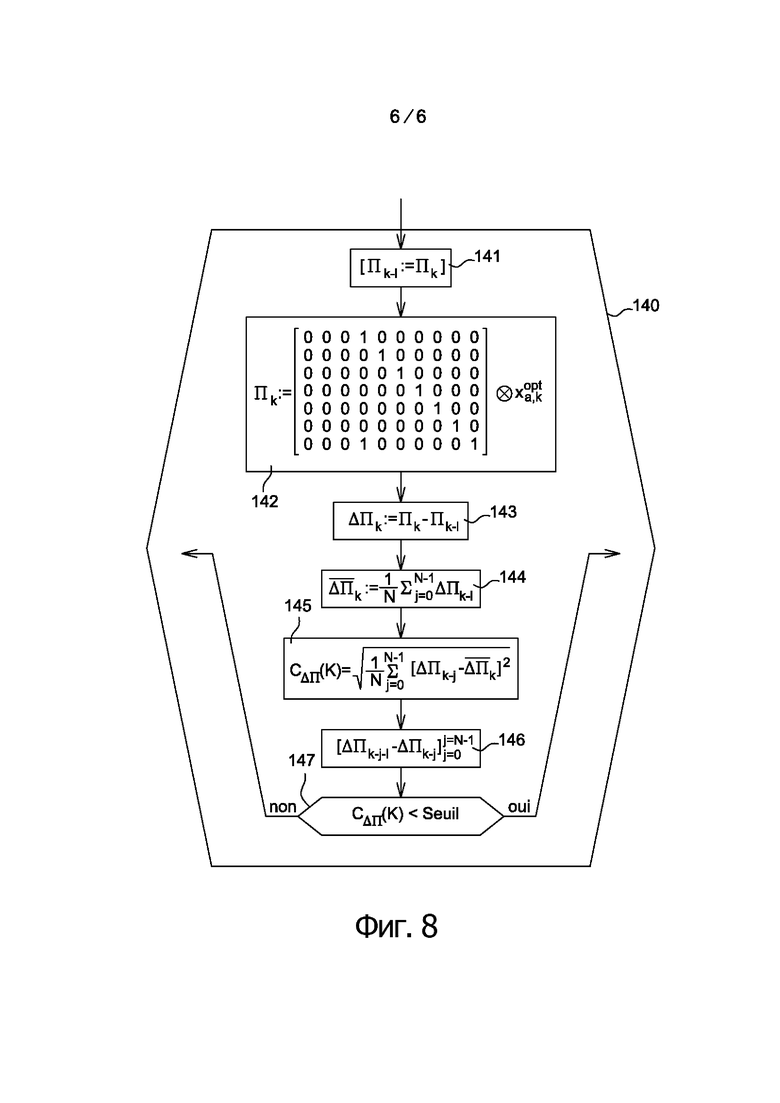
Целью этапа 140 является непрерывная проверка стабильности параметров кибернетической модели, включенной в увеличенную часть оптимального увеличенного вектора состояния
Возможный вариант осуществления этапа 140 состоит, например, в его разделении на семь этапов 141, 142, 143, 144, 145, 1456, 147.
Этап 141 в основном состоит в придании значения вектора параметра Пk, ранее хранившегося в памяти для текущего момента k, вектору параметров Пk-1 для предыдущего момента k-1.
На этапе 142 в основном генерируют новое значение вектора параметров Пk на основании оптимального увеличенного вектора состояния
На этапе 143 в основном вычисляют текущее изменение ΔΠk между значением вектора Пk параметров в текущий момент и значением вектора Πk-1 параметров в предыдущий момент. Предпочтительно текущее изменение применяют для одной составляющей вектора параметров. Иначе говоря, для каждого из параметров индивидуально отслеживают его изменение.
Этап 144 в основном заключается в вычислении арифметического среднего 
На этапе 145 в основном вычисляют стандартное отклонение CΔΠ(k) (standard deviation на английском языке) текущего изменения ΔΠk и N-1 предыдущих изменений ΔΠk-j. Разброс, показываемый типовым отклонением CΔΠ(k), характеризует уровень флуктуации изменений вектора П параметров, который тем выше, чем более нестабильным является поведение водителя.
При этом на этапе 147 степень стабильности Сk считают стабильной, если стандартное отклонение CΔΠ(k) меньше заранее определенного порога. Значение порога определяют заранее, например, экспериментально на статистически репрезентативной выборке водителей, приводя этих водителей в разные возможные состояния рассеянности. Критерий стабильности Ck объявляют нестабильным, если стандартное отклонение CΔΠ(k) превышает или равно заранее определенному порогу. Если наблюдают только один параметр, одного порога достаточно. Если наблюдают несколько параметров, то есть несколько составляющих вектора параметров, существует один порог для каждого параметра, идентичный или нет другому порогу. Сравнение производят для каждого отслеживаемого параметра.
Перед этапом 147, которым завершается этап 140, используют этап 146, чтобы сместить изменения ΔΠk-j вектора параметров на один порядковый номер в направлении предшествующих моментов.
Если степень стабильности Ck свидетельствует о нестабильности, осуществляют этап 150, чтобы сигнализировать об изменении поведения водителя, например, чтобы генерировать тревожный сигнал с целью предупреждения водителя и даже чтобы запустить защитные действия в случае изменения поведения, являющегося источником опасности, такие как торможение транспортного средства или включение светового аварийного сигнала.
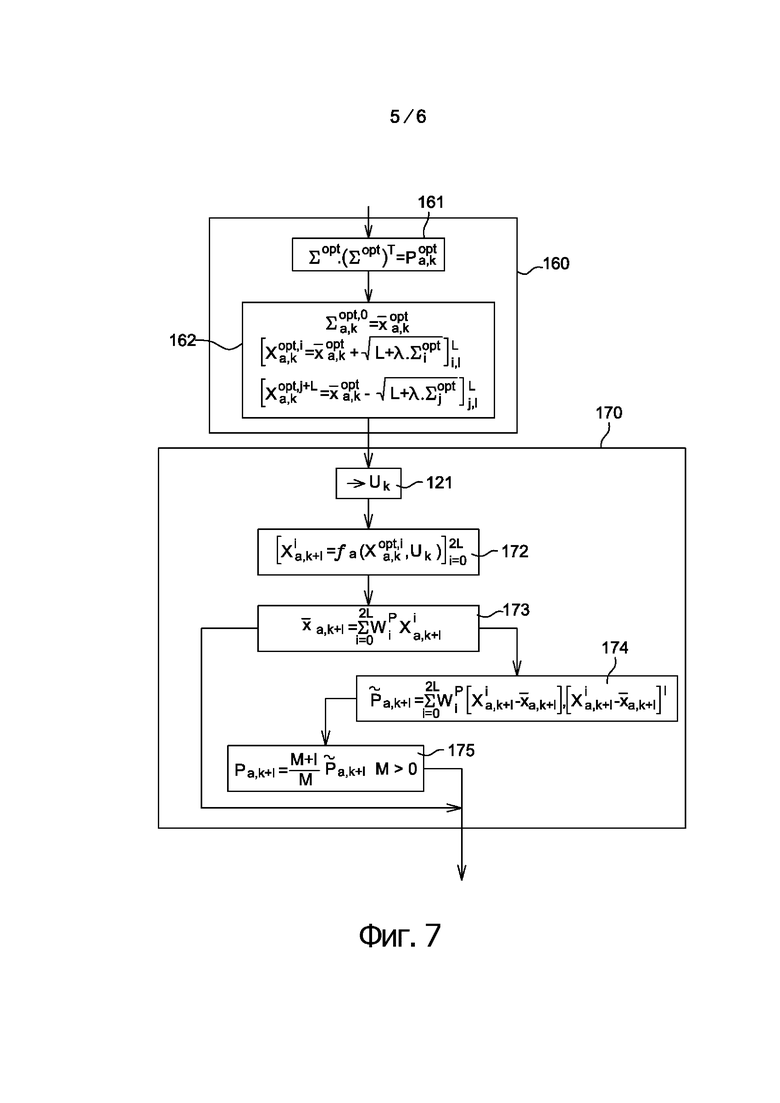
После этапа 150 или сразу после этапа 140, если степень стабильности Ck объявлена стабильной, на этапе 160 опять применяют метод вычисления, известный под названием ансцентного преобразования.
Оптимальный увеличенный вектор состояния 




Этап 160 можно разделить на два этапа 161, 162.
Этап 161 в основном состоит в определении корня Σopt из 
На этапе 162 в основном генерируют совокупность из 2L+1 точек, называемых сигма-точками, в пространстве размером L.
Координатами центральной сигма-точки 






Созданную на этапе 160 оптимальную совокупность сигма-точек используют на этапе 170, чтобы заранее определить увеличенный вектор состояния 
Этап 170 можно разделить на пять этапов 171, 172, 173, 174, 175.
В данном случае опять используют результат этапа 121, на котором в основном считывают вектор Uk входов модели, реально измеренных в текущий момент k.
На этапе 172 каждую сигма-точку 


В примере кибернетической модели, представленном на фиг. 5:
где 










Число L составляющих ожидаемого вектора в данном случае равно 10, так как в примере, представленном в виде кибернетической модели на фиг. 5, наблюдают три временных состояния и семь параметров модели. Число L составляющих может также отличаться от 10, что не выходит за рамки изобретения. Число L меньше 3, если наблюдают только одно временное состояние и только один параметр модели. Число L превышает 3 и даже превышает 10, если наблюдают больше внутренних состояний и больше параметров модели.
На этапе 173 генерируют ожидаемое или прогнозируемое значение 



Таким образом, первая оптимальная совокупность 





Возможные значения состояний 

Что касается этапа 174, то для каждой точки первой оптимальной совокупности сигма-точек генерируют вектор отклонения состояния 

На этапе 174 каждое произведение вектора отклонения выходов на результат транспонирования соответствующего вектора отклонения выхода дает матрицу с L строками и с L столбцами. При этом сумма 2L+1 матриц, взвешенная при помощи весовых коэффициентов
На этапе 175 генерируют значение ковариационной матрицы 
Затем этап 170 опять переходит в этап 100 для новой итерации способа в следующий момент.
Изобретение не ограничивается частной моделью, описанной выше исключительно в качестве иллюстративного примера, которая сама по себе не является элементом изобретения.
Представленное выше описание способа, устройства и транспортного средства показывает преимущество изобретения перед известными до сих пор способами, устройствами и транспортными средствами.
По сравнению с известными промышленными системами, основанными на опосредованном измерении, таком как измерение угла поворота руля, в данном случае диагностика опирается больше на физические законы, связанные с поведением водителя, чем на априорные физические данные, которые не являются верными для всех водителей или для всех ситуаций использования.
По сравнению с подходами, которые опираются на прямое измерение, изобретение не требует добавления дополнительных и специфических датчиков. В его рамках можно использовать датчики, используемые другими системами обеспечения вождения (ADAS от Advanced Driver Assistance System).
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ И СИСТЕМА ОЦЕНКИ РАСХОДА ТЕКУЧЕЙ СРЕДЫ | 2015 |
|
RU2690080C2 |
| УСТРОЙСТВО И СПОСОБ ДЛЯ ОТСЛЕЖИВАНИЯ ОБЪЕКТОВ | 2022 |
|
RU2814813C1 |
| СПОСОБ ОЦЕНКИ НАВИГАЦИОННОГО СОСТОЯНИЯ В УСЛОВИЯХ ОГРАНИЧЕННОЙ ВОЗМОЖНОСТИ НАБЛЮДЕНИЯ | 2015 |
|
RU2701194C2 |
| БЕСПИЛОТНОЕ ТРАНСПОРТНОЕ СРЕДСТВО И СПОСОБ УПРАВЛЕНИЯ ЕГО ДВИЖЕНИЕМ | 2022 |
|
RU2809334C1 |
| СПОСОБ И УСТРОЙСТВО ЧАСТОТНОГО АНАЛИЗА ДАННЫХ | 2009 |
|
RU2503938C2 |
| УСТРОЙСТВО И СПОСОБ ДЛЯ ОПРЕДЕЛЕНИЯ ОБЪЕКТОВ | 2022 |
|
RU2806452C1 |
| ТРАНСПОРТНОЕ СРЕДСТВО С СИСТЕМОЙ ИДЕНТИФИКАЦИИ | 2009 |
|
RU2531115C2 |
| КОМПЬЮТЕРНЫЙ СПОСОБ ДЛЯ МОДЕЛИРОВАНИЯ ВО ВРЕМЯ БУРЕНИЯ И ВИЗУАЛИЗАЦИИ СЛОИСТЫХ ПОДЗЕМНЫХ ФОРМАЦИЙ | 2007 |
|
RU2337404C1 |
| ОЦЕНКА УКЛОНА ДОРОГИ | 2012 |
|
RU2587745C2 |
| СПОСОБ ОРИЕНТАЦИИ И АВТОНОМНОЙ НАВИГАЦИИ КОСМИЧЕСКОГО АППАРАТА СИСТЕМЫ МОНИТОРИНГА ЗЕМЛИ И ОКОЛОЗЕМНОГО ПРОСТРАНСТВА | 2008 |
|
RU2376213C1 |

Изобретение относится к способу и устройству обнаружения изменения поведения водителя автотранспортного средства. Способ обнаружения изменения поведения водителя автотранспортного средства содержит следующие этапы вычисления (130) оптимального текущего значения увеличенного вектора состояния на данный момент в зависимости от ранее оцененного значения увеличенного вектора состояния и от второго вектора измерения, связанного с вектором выхода, при этом увеличенный вектор состояния содержит по меньшей мере одну составляющую, воспроизводящую составляющую вектора временного состояния, и по меньшей мере одну составляющую, воспроизводящую составляющую вектора параметризации, оценивания (140) степени стабильности C(k) по меньшей мере одной составляющей текущего значения увеличенного вектора состояния, которая воспроизводит составляющую вектора параметризации, сигнализирует (150) об изменении поведения водителя, если указанная степень стабильности C(k) свидетельствует о нестабильности. Устройство содержит блок пост-обработки, блок вычисления, соединенный с блоком пост-обработки и находящийся в бортовом компьютере, который содержит записанную в памяти кибернетическую модель. Достигается определение опасного состояния водителя. 3 н. и 5 з.п. ф-лы, 8 ил.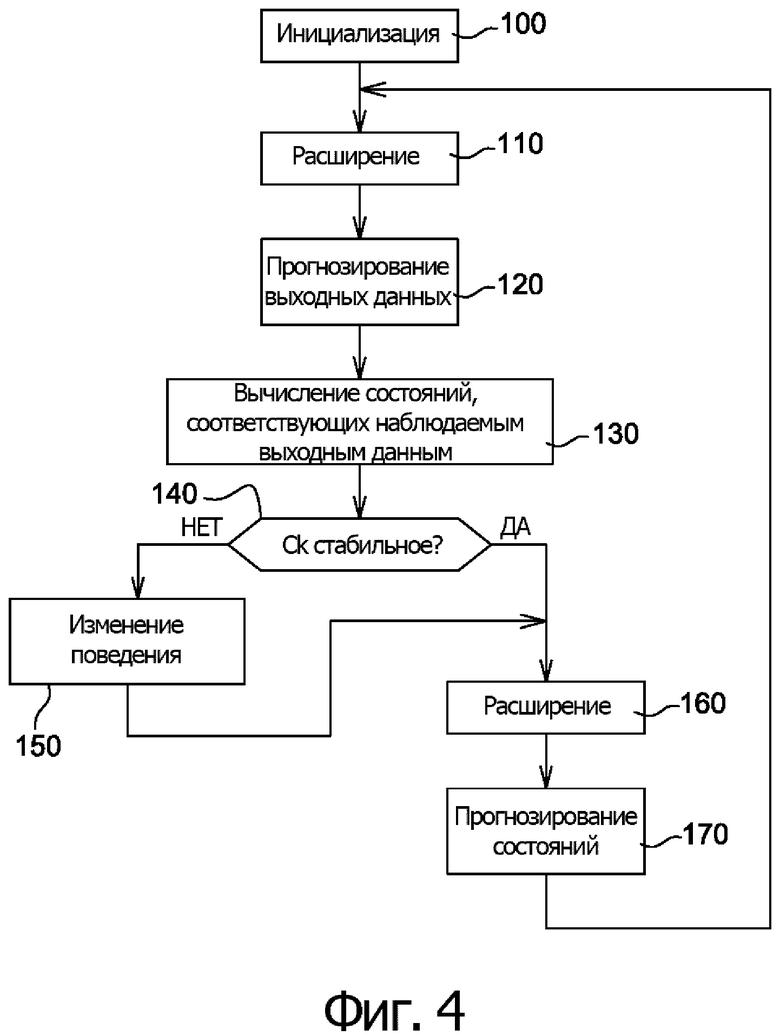
1. Способ обнаружения изменения поведения водителя автотранспортного средства при помощи кибернетической модели, образованной первым вектором (U) измерения, связанным по меньшей мере с одним входом, соединенным с измерительным инструментом, для количественного определения сенсомоторных данных, относящихся к водителю, вектором (Y) выхода, содержащим по меньшей мере один выход, для оценки данных действия, производимого водителем; вектором (П) параметризации, содержащим по меньшей мере один параметр для количественного определения физиологических данных водителя; и вектором (Х) временного состояния, содержащим по меньшей мере одно временное состояние указанной модели, отличающийся тем, что содержит этапы, осуществляемые в реальном времени, на которых:
- вычисляют (130) по меньшей мере одно оптимальное текущее значение (

- оценивают (140) степень стабильности C(k) по меньшей мере одной составляющей текущего значения (
- сигнализируют (150) об изменении поведения водителя, если указанная степень стабильности C(k) свидетельствует о нестабильности.
2. Способ по п. 1, отличающийся тем, что содержит следующие этапы, осуществляемые в реальном времени, на которых:
- вычисляют (120) коэффициент (Kk) усиления байесовского фильтра на основании ранее оцененного значения (
3. Способ по п. 2, отличающийся тем, что содержит этапы, осуществляемые в реальном времени, на которых:
- генерируют (110) первую прогнозируемую совокупность сигма-точек (
- вычисляют (122) вторую прогнозируемую совокупность сигма-точек (
- вычисляют (126) коэффициент усиления (Кk) байесовского фильтра на основании второй прогнозируемой совокупности сигма-точек (
4. Способ по одному из пп. 1-3, отличающийся тем, что содержит этапы, осуществляемые в реальном времени, для:
- вычисления (170) будущего оценочного значения (
5. Способ по п. 4, отличающийся тем, что содержит этапы, осуществляемые в реальном времени, на которых:
- генерируют (160) первую оптимальную совокупность сигма-точек (

- вычисляют (172) вторую оптимальную совокупность сигма-точек (
- вычисляют (173) будущее оценочное значение (
6. Способ по одному из пп. 1-5, отличающийся тем, что этап оценки (140) указанной степени стабильности С(k) включает в себя этапы, на которых:
- получают (142) значение (Пk) вектора параметризации на основании увеличенного вектора (Xa) состояния в данный момент;
- вычисляют (144) изменение (ΔΠk) параметров на основании значения (Πk) в данный момент и значения (Πk-1) в предыдущий момент вектора параметризации;
- в сдвиговом регистре сохраняют (146) указанное изменение (ΔΠk) параметров таким образом, чтобы получить количество (N) предшествующих изменений параметров;
- вычисляют (145) стандартное отклонение (CΔΠ) на указанном количестве (N) изменений;
- отмечают (147) нестабильность указанной степени стабильности C(k), если указанное стандартное отклонение (CΔΠ) не находится ниже заранее определенного порога.
7. Устройство обнаружения изменения поведения водителя автотранспортного средства, содержащее блок (10) пост-обработки, соединенный с одним или несколькими измерительными инструментами (6, 8), для количественного определения одного или нескольких сенсомоторных данных, относящихся к водителю, блок (11) вычисления, соединенный с блоком (10) пост-обработки и находящийся в бортовом компьютере, который содержит записанную в памяти кибернетическую модель, образованную: вектором (U) измерения, содержащим по меньшей мере один вход; вектором (Y) выхода, содержащим по меньшей мере один выход, для оценки данных действия, производимого водителем; вектором (П) параметризации, содержащим по меньшей мере один параметр для количественного определения физиологических данных водителя; и временным вектором (Х) состояния, содержащим по меньшей мере одно временное состояние указанной модели, отличающееся тем, что содержит в памяти программу, содержащую командные коды программы для осуществления этапов способа по одному из пп. 1-6, когда указанную программу исполняет компьютер, и процессор для исполнения в реальном времени указанной программы.
8. Транспортное средство, содержащее устройство по п. 7.
| КОМПОЗИЦИЯ ПРОЧНОЙ БЫСТРО РАСПАДАЮЩЕЙСЯ ТАБЛЕТКИ | 2008 |
|
RU2472493C2 |
| WO 2008083731 A1, 17.07.2008 | |||
| DE 102009009975 A1, 01.04.2010 | |||
| СПОСОБ И УСТРОЙСТВО ДЛЯ ОБНАРУЖЕНИЯ ВОЖДЕНИЯ В СОСТОЯНИИ УСТАЛОСТИ И АВТОМОБИЛЬ, ИСПОЛЬЗУЮЩИЙ ЭТИ СПОСОБ И УСТРОЙСТВО | 2010 |
|
RU2519964C2 |

