Предлагаемое изобретение относится к системам управления и регулирования величин, определяющих местоположение в пространстве наземных, водных и других транспортных средств, и может быть использовано, в частности, для управления группой надводных и подводных кораблей при решении ими единой задачи.
Известны различные устройства управления движением судна, использующие многопараметрические математические модели для выработки сигналов управления и содержащие датчики состояния судна, вычислитель и средства, обеспечивающие достижение того или иного технического результата (см., например, патенты РФ №2224279 и №2393522, МПК G05D 1/00).
Известные устройства обеспечивают выработку сигналов управления для одного судна, однако не могут быть использованы при управлении группой судов, требующем прогнозирования взаимного расположения и характеристик движения каждого судна для их безопасной и оптимальной совместной работы при решении какой-либо общей задачи.
Известно устройство прогнозирования будущего состояния корабля (см. патент РФ №2189624, МПК G05D 1/00), обеспечивающее прогнозирование в данный момент времени состояние корабля (угол дифферента и угловую скорость) в будущий наперед заданный момент времени с некоторым дискретным повторением вычисления прогноза в текущем времени.
Известное устройство является ближайшим по технической сущности, принято за прототип и содержит, также как и заявляемое устройство, задатчик, подключенный к блоку программы работ, блок индикации и формирователь прогноза, включающий блок памяти, подключенный к вычислителю.
Указанное устройство прогнозирует угол дифферента и угловую скорость в заранее заданный будущий момент времени и сравнивает их с допустимыми значениями (уставками). Полученные данные поступают на блок индикации для информирования оператора.
Устройство-прототип может быть использовано на одном подвижном объекте, внешние воздействия на который многократно повторяются и заранее достоверно известны, но не обеспечивает прогнозирование состояния группы подвижных объектов при неопределенных внешних воздействиях.
Решаемая техническая задача - возможность прогнозирования состояния и взаимного положения каждого подвижного объекта группы в определенный будущий момент времени с одновременной оценкой безопасности при их перемещении.
Указанная задача решается тем, что в устройство прогнозирования и анализа обстановки для группы подвижных объектов, содержащее задатчик интервала времени прогноза, подключенный к блоку программы работы, блок индикации и формирователь прогноза, включающий блок памяти, подключенный к вычислителю, введены блок формирования массивов входных данных и дополнительно (n-1) формирователей прогнозов, где n - количество подвижных объектов группы, при этом в каждый формирователь прогноза введен блок моделирования траектории движения соответствующего объекта, подключенный входом к блоку памяти, а выходом - к вычислителю, выходы блока формирования массивов входных данных соединены с соответствующими блоками памяти, а выходы вычислителей подключены к блоку индикации.
Оценка безопасности при будущем взаимном перемещении объектов обеспечивается введением в устройство блока анализа прогнозируемых состояний объектов, входами подключенного к вычислителям формирователей прогнозов, а выходом - к блоку индикации.
Сущность изобретения поясняется чертежом, где на фиг.1 представлена схема заявляемого устройства прогнозирования и анализа обстановки, на фиг.2 изображено положение объекта, иллюстрирующее применение математической модели, на фиг.3 - блок-схема алгоритма работы блока анализа прогнозируемых состояний объектов.
На фиг.1 чертежа обозначено:
1 - блок формирования массива входных данных
2 - блок программы работы
3 - задатчик интервала времени прогноза
4 - блок памяти
5 - блок моделирования траектории движения объекта
6 - вычислитель
7 - формирователь прогноза
8 - блок анализа прогнозируемых состояний объектов
9 - блок индикации
Блок формирования массива входных данных 1 подключен через блоки памяти 4 к вычислителям 6, второй вход каждого из которых подключен к соответствующему блоку моделирования 5, формирователей прогноза 7. К выходу вычислителей 6 подключены блок индикации 9 и блок анализа прогнозируемых состояний 8, который своим выходом также подключен ко входу блока индикации 9. Блок программы работы 2 выходами соединен со входами вычислителей 6 всех формирователей прогноза 7. Выход задатчика 3 подключен к блоку программы работы 2.
Блок формирования массива входных данных 1 обеспечивает обработку входной информации, например, для группы морских объектов информации от спутниковой системы сбора данных навигационных, гидроакустических систем, а также систем управления движением надводных и подводных объектов и выдачу соответствующих массивов в блоки памяти 5 формирователей прогнозов 7.
Количество формирователей прогноза 7 в устройстве должно соответствовать числу морских объектов, участвующих в выполнении предстоящих работ. Каждый формирователь прогноза 7 соответствует одному объекту обстановки и осуществляет прогнозирование его состояния и его положения в пространстве, а также формирует набор координат возможной трассы объекта.
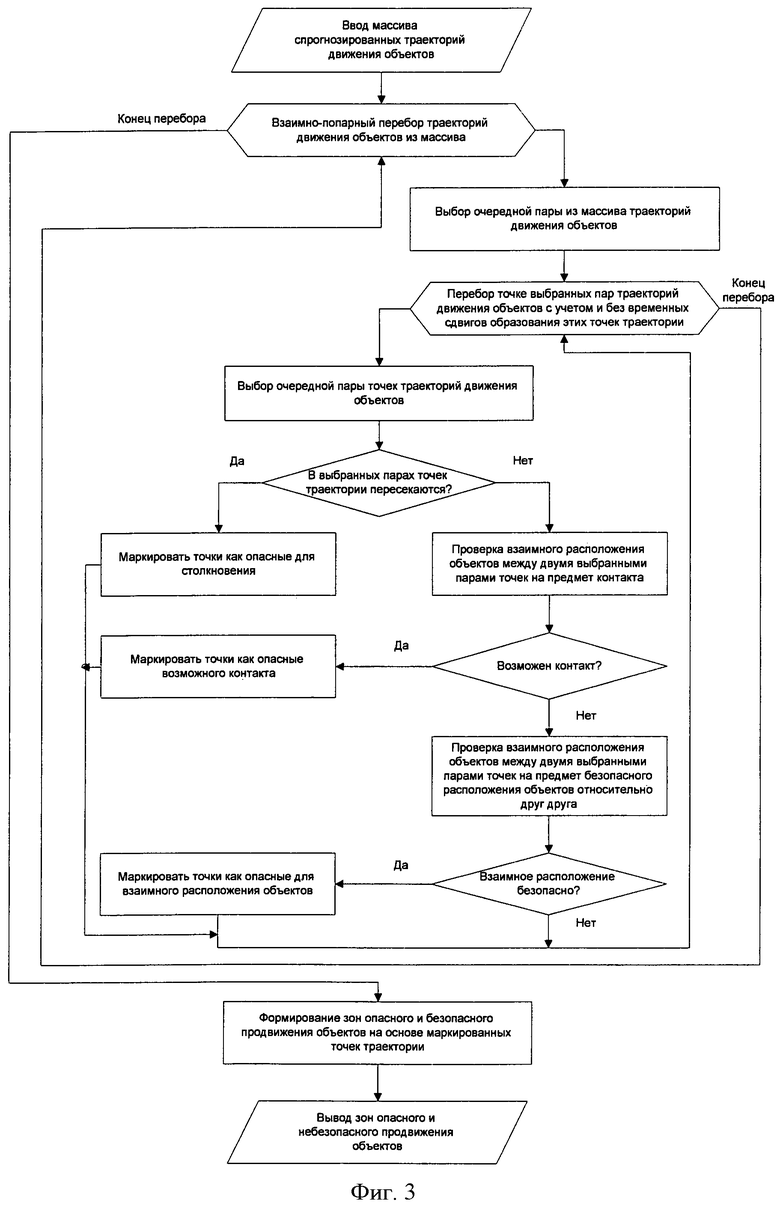
Блок анализа прогнозируемых состояний объектов 8 определяет на заданный будущий момент времени возможность пересечения траекторий движения объектов, возможность столкновения, обусловленную габаритами объектов и взаимное их расположение на безопасном расстоянии друг от друга.
Блок формирования массива входных данных 1 может быть реализован программно или на ПЛИСах, формирователи прогноза 7 и блок анализа 8 легко реализуются на типовых микроконтроллерах, блок индикации может представлять собой лучевой или жидкокристаллический компьютерный монитор.
Рассмотрим работу устройства для группы нескольких морских подвижных объектов, количество которых фиксировано на протяжении всей работы устройства.
Входные данные для устройства поступают извне. В качестве источников информации могут служить: навигационный комплекс, гидроакустический комплекс, система управления движением. Блок формирования массива входных данных 1 подключается к указанным системам через спутниковую или радио связь, обрабатывает полученную информацию и предоставляет ее для блока памяти 4 каждого формирователя прогноза 7 в следующем виде: координаты соответствующего формирователя 7 объекта относительно некоторого выбранного начала координат, вектор скорости объекта, углы крена, дифферента и рыскания.
Время прогноза будущего положения всех объектов, входящих в состав группы, и время начала работы прогноза задается задатчиком 3. Сигнал от задатчика 3 поступает в блок программы работы 2, из которого поступают команды в блоки памяти 4 всех формирователей прогноза 7 на запоминание текущего состояния соответствующего корабля.
В блоках моделирования 5 формирователей прогноза 7 осуществляется моделирование движения объекта согласно заложенных в них моделях движения. В общем случае математические модели движения подвижных объектов, заложенные в блоках моделирования траектории движения объекта 5, могут различаться как количеством уравнений, решаемых моделью, так и их природой (линейные, трансцендентные, дифференциальные) и способом аппроксимации, но они должны позволять получать координаты подвижного объекта, моделируемого в каждом конкретном блоке, на каждой временной итерации; начальная и конечная временная метка моделирования задаются задатчиком 3 и поступают в виде команды от блока программы работ 2. Блок 5 реализует решение линейной системы дифференциальных уравнений первого порядка относительно проекций координат скорости на оси некоторой неподвижной системы отсчета с началом координат в некоторой заданной точке, угловых скоростей объекта, а также линейных и угловых координат объекта итерационным методом Рунге-Кутта 4-го порядка.
В общем случае движение объекта в 3-мерном пространстве может быть задано в виде зависимостей координат подвижного объекта от времени, в частности эта зависимость может носить дифференциальный характер
где φ1(t), φ2(t), φ3(t) - скорости изменения координат во времени.
Указанная форма задания движения объекта позволяет моделировать управление движущимся объектом путем изменения его курса, скорости и угла подъема.
В блоке моделирования траектории движения объекта 5 выражения для скоростей изменения координат объекта во времени определяются следующими зависимостями:



или


где V - скорость объекта на траектории;
Kt - курс движения объекта;
γt - угол подъема при движении объекта (см. фиг.2).
Таким образом, приведенная система уравнений полностью описывает движение во времени объекта в 3-мерном пространстве в зависимости от скорости объекта, курса и угла подъема.
Исходя из необходимости моделирования управляемого движения, заключающегося в воспроизведении маневра объекта, выполняемого путем изменения курса, угла подъема и скорости во времени, блок 5 решает еще три дифференциальных уравнения

где a(t) - линейное ускорение объекта;
ωк(t) - угловая скорость объекта;
ωγ(t) - угловая скорость объекта по углу подъема.
Изменение линейного ускорения, угловой скорости по курсу и угловой скорости по углу подъема связано с изменением положения органов управления объекта.
При разрешении указанных систем дифференциальных уравнений при моделировании состояния движения объекта блоком 5 полагается, что линейное ускорение a(t), угловая скорость по курсу ωк(t) и угловая скорость по углу подъема ωγ(t) от времени не зависит и величина их изменяется пропорционально положению органов управления объекта, т.е. a(t)=const; ωк(t)=const; ωγ(t)=const. Тогда законы изменения а, ωк и ωγ принимают вид



При численном решении указанных систем дифференциальных уравнений блоком 5 реализуется одношаговый метод Рунге-Кутта 4-го порядка, являющийся обобщением квадратурной формулы Симпсона для численного интегрирования



где:
Vi+0.5=Vi+a·Δt/2
ki+0.5=ki+ωκ·Δt/2
γi+0.5=γi+ωγ·Δt/2
Δt - шаг интегрирования.
При моделировании движения объектов блоком 5 необходимо задать начальные значения координат положения объектов (x, y, Н), а также начальные значения скорости объекта на траектории (V), курса движения объекта (Kt) и угла подъема (γt). При отсутствии задания начальных значений используются нулевые.
Вычислитель 6 производит вычисление координат траектории движения объекта, опираясь на данные, полученные при моделировании состояния объекта блоком 5 и при окончании моделирования, передает их в блок анализа прогнозируемых состояний объекта 8, а также на блок индикации 9.
Блок анализа прогнозируемых состояний объектов 8 производит анализ траекторий движения объектов, вычисленных с помощью блока 6, на предмет их пересечения, а также производится поиск зон небезопасного продвижения подвижных объектов с учетом их габаритов. Работа блока 8 опирается на алгоритм, приведенный на фиг.3. Определенные в процессе вычислений блока 8 зоны небезопасного продвижения подвижных объектов передаются в блок индикации 9.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ прогнозирования состояния группы подвижных объектов | 2018 |
|
RU2701091C1 |
| УСТРОЙСТВО ПРОГНОЗИРОВАНИЯ БУДУЩЕГО СОСТОЯНИЯ КОРАБЛЯ | 2001 |
|
RU2189624C1 |
| СПОСОБ ПОДДЕРЖКИ ОПЕРАТОРА С ПОМОЩЬЮ ДОПОЛНЕННОЙ РЕАЛЬНОСТИ ПРИ ДИСТАНЦИОННОМ УПРАВЛЕНИИ НАЗЕМНЫМ МОБИЛЬНЫМ РОБОТОМ В УСЛОВИЯХ НАЛИЧИЯ ЗАДЕРЖЕК В КАНАЛАХ ПЕРЕДАЧИ ИНФОРМАЦИИ | 2022 |
|
RU2792328C1 |
| СИСТЕМА УПРАВЛЕНИЯ ДВИЖЕНИЕМ КОРАБЛЯ | 2006 |
|
RU2319641C1 |
| СИСТЕМА ДЛЯ ПРОГНОЗИРОВАНИЯ РЕЗУЛЬТАТОВ НАТУРНЫХ ИСПЫТАНИЙ БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА | 2000 |
|
RU2163732C1 |
| СПОСОБ УПРАВЛЕНИЯ ДВИЖЕНИЕМ КОРАБЛЯ С СОВЕТЧИКОМ СУДОВОДИТЕЛЮ | 2010 |
|
RU2432296C1 |
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ КУРСОМ СУДНА И СИСТЕМА АВТОРУЛЕВОГО ДЛЯ РЕАЛИЗАЦИИ СПОСОБА | 2004 |
|
RU2282884C2 |
| СИСТЕМА ДЛЯ ПРОГНОЗИРОВАНИЯ РЕЗУЛЬТАТОВ НАТУРНЫХ ИСПЫТАНИЙ БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА | 2000 |
|
RU2160927C1 |
| ЛЕТНО-МОДЕЛИРУЮЩИЙ КОМПЛЕКС ИССЛЕДОВАНИЯ ПОСАДОЧНЫХ СИСТЕМ ЛЕТАТЕЛЬНЫХ АППАРАТОВ КОРАБЕЛЬНОГО БАЗИРОВАНИЯ | 1991 |
|
RU2042583C1 |
| МОДЕЛИРУЮЩИЙ КОМПЛЕКС ДЛЯ ПРОВЕРКИ СИСТЕМЫ УПРАВЛЕНИЯ БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА | 2010 |
|
RU2432592C1 |

Изобретение относится к устройству прогнозирования и анализа обстановки для группы подвижных объектов. Техническим результатом является расширение функциональных возможностей за счет возможности прогнозирования состояния и взаимного положения каждого подвижного объекта группы в определенный будущий момент времени с одновременной оценкой безопасности при их перемещении. Устройство обеспечивает прогнозирование состояния каждого объекта группы в некоторый будущий момент времени за счет наличия в нем формирователей прогнозов по количеству объектов и блока формирования массивов входных данных для каждого формирователя. Модели движения каждого объекта заложены в соответствующих блоках моделирования формирователей. Каждый формирователь включает также блок памяти и вычислитель, работу устройства организует блок программ работы и задатчик, результаты прогнозов выводятся на блок индикации. Прогнозирование взаимной безопасности при перемещениях объектов обеспечивает блок анализа прогнозируемых состояний, подключенный к вычислителям формирователей прогнозов. 1 з.п. ф-лы, 3 ил.
1. Устройство прогнозирования и анализа обстановки для группы подвижных объектов, содержащее задатчик интервала времени прогноза, подключенный к блоку программы работы, блок индикации и формирователь прогноза, включающий блок памяти, подключенный к вычислителю, отличающееся тем, что устройство содержит блок формирования массивов входных данных и дополнительно (n-1) формирователей прогнозов, где n - количество подвижных объектов группы, при этом в каждый формирователь прогноза введен блок моделирования траектории движения соответствующего объекта, подключенный входом к блоку памяти, а выходом - к вычислителю, выходы блока формирования массивов входных данных соединены с соответствующими блоками памяти, а выходы вычислителей подключены к блоку индикации.
2. Устройство по п.1, отличающееся тем, что содержит блок анализа прогнозируемых состояний объектов, входами подключенный к вычислителям формирователей прогнозов, а выходом - к блоку индикации.
| УСТРОЙСТВО ПРОГНОЗИРОВАНИЯ БУДУЩЕГО СОСТОЯНИЯ КОРАБЛЯ | 2001 |
|
RU2189624C1 |
| УСТРОЙСТВО ДЛЯ МОДЕЛИРОВАНИЯ ПРОЦЕССА ПЕРЕМЕЩЕНИЯ ПОДВИЖНОГО ОБЪЕКТА | 2005 |
|
RU2298825C1 |
| TW 200914305 А, 01.04.2009 | |||
| KR 20080081216 А, 09.09.2008. | |||

