Настоящее изобретение относится к способу для инициализации системы сочетания датчиков согласно ограничительной части п. 1 формулы изобретения, к системе для инициализации системы сочетания датчиков согласно ограничительной части п. 9 формулы изобретения, а также к использованию системы.
Все данные измерений, по существу, содержат ошибки и в большинстве случаев, к тому же, нет постоянной возможности доступа к данным измерений. Наряду с зависимостью данных измерений от имманентных свойств датчика, данные измерений помимо этого зачастую также зависят от условий внешней среды. Погрешности датчика или же погрешности измерений подразделяются при этом на квазистационарные - константные составляющие на протяжении многих измерений, как, например, так называемый offset, и статистические - случайные от измерения к измерению составляющие, как, например, шум. Тогда как случайные составляющие, по существу, невозможно исправить детерминированным путем, квазистационарные погрешности обычно при возможности наблюдения исправить можно. Существенные, не поддающиеся исправлению погрешности, как правило, можно, по меньшей мере, при распознаваемости избежать. Далее, погрешности в данных измерений зачастую можно определить лишь после анализа целого ряда сравнительных измерений. Из уровня техники в этой связи уже известны способы сочетания датчиков, которые, как правило, пригодны для того, чтобы исправлять или фильтровать данные измерений различных датчиков или также систем датчиков. В особенности в автомобильной области при этом должны соблюдаться особенные требования, т.к. множество различных датчиков фиксируют общую окружающую ситуацию или также состояние автотранспортного средства посредством различных принципов измерений и описывают эту окружающую ситуацию или также состояние автотранспортного средства посредством множества различных данных измерений. Для сочетания датчиков, применимого в автомобильной области, необходимы, таким образом, как можно большая устойчивость к случайным помехам, а также распознавание и компенсация систематических погрешностей. Также должны быть исправлены временные воздействия на результаты измерений и заполнены временные выпадения или состояние неготовности датчиков.
В DE 102012216211 А1 описан способ выбора спутника, причем спутник является одним из спутников глобальной спутниковой системы навигации. Прежде чем такой спутник при этом будет привлечен к определению местоположения, в частности какого-либо транспортного средства, полученные сигналы GNSS различными способами проверяются на достоверность. Для этой верификации используются различная от случая к случаю избыточность информации или также известные взаимосвязи. Так, например, DE 102012216211 А1 раскрывает возможность определять на основании сигнала спутника расстояние транспортного средства до спутника, а также относительную скорость транспортного средства в отношении спутника. При этом расстояние может определяться по времени прохождения сигнала, тогда как относительная скорость может определяться по фазовым измерениям сигнала. Поскольку расстояние и относительная скорость зависят друг от друга, они могут верифицировать друг друга. Далее верификация показателей, определенных по сигналу, может проводиться в отношении к известным граничным условиям, поскольку транспортное средство, как правило, движется в рамках определенной скорости. Также описывается, что при приеме многих сигналов от различных спутников, определяются расстояния к нескольким спутникам и эти расстояния одновременно верифицируют друг друга посредством тригонометрических зависимостей и известного расстояния к спутникам. В завершение верификация расстояния, определенного по сигналу, или также скорости, определенной по сигналу, возможна посредством других датчиков, которые также позволяют определить местоположение или также определить скорость. В случае, если сигналы какого-либо спутника не могут быть верифицированы, этот спутник к определению местоположения или также определению скорости не привлекается.
Из DE 102010063984 А1 известна система датчиков, включающая в себя многие элементы датчиков. Элементы датчиков выполнены таким образом, что они охватывают, по меньшей мере, частично, различные первичные измеряемые величины и применяют, по меньшей мере, частично, различные принципы измерений. Из первичных измеряемых величин элементов датчиков выводятся затем, по меньшей мере, частично, последующие измеряемые величины. Далее, система датчиков включает в себя блок обработки сигналов, блок интерфейса, а также многие функциональные устройства. При этом элементы датчиков, а также все функциональные устройства связаны с блоком обработки сигналов. Таким образом, первичные измеряемые величины поставляют избыточную информацию, которая сравнивается друг с другом в блоке обработки сигналов или также может подкрепить друг друга. Из сравнения наблюдаемых величин, рассчитанных различным путем, можно сделать выводы по поводу надежности и точности наблюдаемых величин. Блок обработки сигналов характеризует точность наблюдаемых величин и предоставляет наблюдаемые величины с указанием точности через блок интерфейса различным функциональным устройствам.
DE 102012219478 А1 раскрывает систему датчиков для автономной оценки целостности своих данных. Система датчиков предпочтительно используется в автотранспортных средствах и включает в себя многие элементы датчиков, выполненные таким образом, что они фиксируют, по меньшей мере, частично, различные первичные измеряемые величины или же применяют, по меньшей мере, частично, различные принципы измерений. Система датчиков включает в себя далее блок обработки сигналов, анализирующий, по меньшей мере, частично, совместно сигналы датчиков и одновременно оценивающий качество информации сигналов датчиков. Помимо этого, блок обработки сигналов предоставляет информацию о непротиворечивости, по меньшей мере, даты физической величины, причем дата физической величины вычисляется на основе сигналов датчиков элементов датчиков, которые либо непосредственно фиксируют физическую величину, либо физическая величина может быть вычислена из их сигналов датчиков. Информация о непротиворечивости даты теперь вычисляется на основе имеющейся прямо или косвенно избыточной информации датчиков.
Однако, известные из уровня техники, соответствующие данной области способы и системы датчиков недостаточны в том плане, что проблемы, возникающие при инициализации этих систем датчиков, не учитываются надлежащим образом. При инициализации большое число физических величин сперва неизвестно, поскольку никакие данные измерений этих величин не могут быть непосредственно зафиксированы. В то же время возможные погрешности этих физических величин могут быть настолько велики, что предполагаемые для соответствующего виду слияния данных датчиков условия линеаризации в фильтре слияния становятся недействительными, вследствие чего фильтр слияния и проведенная в нем оценка погрешности становится нестабильной. Это приводит к неисправности сочетания датчиков.
В связи с этим, задачей настоящего изобретения является предложение улучшенного способа инициализации системы сочетания датчиков.
Эта задача согласно изобретению, решается за счет способа инициализации системы сочетания датчиков по п. 1 формулы изобретения.
Настоящее изобретение относится к способу инициализации системы сочетания датчиков, причем система сочетания датчиков включает в себя одну базовую систему и, по меньшей мере, одну корректирующую систему, причем и базовая система и, по меньшей мере, одна корректирующая система фиксируют результаты измерений, причем результаты измерений описывают прямо или косвенно физические величины, причем результаты измерений в каждом случае содержат значения погрешности, причем значения погрешности описывают отклонения результатов измерений от описанных физических величин, причем, по меньшей мере, косвенно описанные в результатах измерений базовой системы физические величины, а также значения их погрешности невозможно определить во время инициализации системы сочетания датчиков, причем результаты измерений после завершения инициализации непрерывно сливаются в объединенный набор данных и причем, по меньшей мере, для одной из косвенно описанных в результатах измерений базовой системы физических величин, а также значений ее погрешности определяются начальные значения из результатов измерений, по меньшей мере, одной корректирующей системы.
Отсюда вытекает преимущество, заключающееся в том, что при загрузке или же запуске системы сочетания датчиков с самого начала доступны результаты измерений, необходимые системе сочетания датчиков для всех физических величин. Таким образом, система сочетания датчиков, по сути, с самого начала находится в максимально возможном полном рабочем состоянии.
Известные системы сочетания датчиков, как правило, включают в себя при этом так называемый фильтр слияния, действующий как рекурсивный фильтр. Следовательно, это означает, что фильтр слияния делает заключения для настоящего на основании результатов измерений из прошлого. Но при инициализации системы сочетания датчиков еще не имеется результатов измерений из прошлого, в связи с чем способ согласно данному изобретению использует начальные значения из результатов измерений, по меньшей мере, одной корректирующей системы, с целью предоставления фильтру слияния результатов измерений в качестве начальных значений.
Изобретение использует то обстоятельство, что, по меньшей мере, одна корректирующая система при инициализации, как правило, по сути, сразу же фиксирует результаты измерений и может их предоставить.
Система сочетания датчиков, как правило, объединяет в эксплуатации результаты измерений базовой системы, а также корректирующей системы в один общий объединенный набор данных, являющийся более надежным и точным в сравнении с отдельными результатами измерений и позволяющий оценить точность и надежность объединенных результатов измерений, в особенности, путем оценки погрешности.
Понятие ''во время инициализации системы сочетания датчиков'' используется в контексте изобретения синонимично с ''при загрузке системы сочетания датчиков'' или же ''при запуске системы сочетания датчиков'' и обозначает временной диапазон процесса инициализации системы сочетания датчиков. Согласно данному изобретению инициализация считается законченной, когда фильтру слияния базовой системы будет предоставлена вся информация, необходимая для его правильного режима работы, т.е. как прямо, так и косвенно описанные в результатах измерений базовой системы физические величины и результаты измерений корректирующих систем будут ему необходимы лишь для определения значений погрешности базовой системы.
Способ согласно данному изобретению предпочтительно осуществляется не только при первой инициализации системы сочетания датчиков, но и при некоторых или всех последующих повторных инициализациях.
Косвенно описанные физические величины, а также, в особенности, значения их погрешности предпочтительно определяются посредством физических или также математических зависимостей из измеренных напрямую физических величин. Примером такой косвенно описанной физической величины является скорость, которая описывается косвенно по изменению местонахождения в пространстве по времени. Местонахождение, являясь физической величиной, измеряется, следовательно, напрямую и затем из изменения местонахождения с текущим временем определяется посредством дифференцирования скорость.
Предпочтительно предусмотрено применять для составления общего объединенного набора данных лишь результаты измерений с идентичной временной отметкой. Результаты измерений описывают, следовательно, одну и ту же физическую величину в один и тот же момент времени. Таким образом, привлеченные результаты измерений в идеале являются идентичными или же должны в идеале таковыми являться. Отсюда вытекает преимущество, заключающееся в том, что погрешности результатов измерений определяются лучше и надежнее. Таким образом улучшается также точность или также надежность объединенного набора данных.
Предпочтительно предусмотрено, чтобы общий объединенный набор данных включал в себя, по меньшей мере, значения погрешности базовой системы, причем значения погрешности базовой системы определяются посредством сравнения с результатами измерений, по меньшей мере,, одной корректирующей системы и, при необходимости, посредством сравнительной оценки результатов измерений базовой системы по отношению к результатам измерений, по меньшей мере, одной корректирующей системы.
Далее предпочитается, чтобы, по меньшей мере, одна корректирующая система определяла начальные значения и значения поправок с помощью, в каждом случае отдельной, обработки результатов измерений. Для этих целей, по меньшей мере, одна корректирующая система может включать в себя, к примеру, отдельную и, насколько возможно, независимую от системы сочетания датчиков предварительную обработку результатов измерений. В особенности в рамках плотного сцепления, известного также как tightly coupling, сперва определяет, по меньшей мере, одна корректирующая система самостоятельно значения тех физических величин, которые описаны посредством результатов измерений, по меньшей мере, одной корректирующей системы. В рамках этой предварительной обработки, тогда уже возможно первое исправление результатов измерений, по меньшей мере, одной корректирующей системы.
Помимо этого, предпочитается, чтобы базовая система была системой инерциальной навигации, и чтобы, по меньшей мере, одна корректирующая система была глобальной спутниковой системой навигации и/или одометрической навигационной системой. Таким образом, настоящее изобретение пригодно, в особенности, для навигации и для использования в навигационных системах, предпочтительно в автотранспортных средствах. Следовательно, таким образом система сочетания датчиков определяет из результатов измерений местонахождение, в особенности, местонахождение автотранспортного средства. В случае глобальной спутниковой системы навигации речь может идти, к примеру, о системе навигации GPS. Одометрическая навигационная система сперва определяет скорость, например, посредством известного отрезка пути, проходимого шиной автотранспортного средства за один оборот и, таким образом, обеспечивает возможность определения местоположения с учетом угла поворота в рамках навигации по методу счисления пути. Особенно целесообразным является оснащение спутниковой системы навигации, по меньшей мере, двумя приемниками спутникового сигнала. Благодаря этому улучшается качество приятных сигналов спутника и, вместе с тем, надежность и точность спутниковой системы навигации.
Предпочтительно предусмотрено, чтобы начальные значения определялись для значений погрешности как дисперсии на основе неточностей измерений, по меньшей мере,, одной корректирующей системы. Таким образом, прежде всего учитывается обстоятельство того, что система сочетания датчиков или также фильтр слияния, как правило, также определяет значения погрешности и для этого нуждается в наличии результатов измерений. Итак, вследствие привлечения дисперсий результатов измерений, по меньшей мере, одной корректирующей системы в качестве начальных значений для значений погрешности, также и эта величина может быть предоставлена системе сочетания датчиков или также фильтру слияния сравнительно простым способом.
В особенности предпочитается, чтобы неточности измерений брались при этом из спецификации датчика или также технического паспорта датчика базовых систем или также, по меньшей мере, одной корректирующей системы или также определялись методом распространения погрешности. Основанием для определения методом распространения погрешности является определение точности измерения посредством самой базовой системы или также, по меньшей мере, одной корректирующей системы и соответствующая предварительная обработка. Предварительная обработка при этом, как правило, уже применяется известными системами сочетания датчиков и, таким образом, может использоваться для способа согласно данному изобретению без дополнительных затруднений.
Предпочтительным образом предусмотрено, чтобы косвенно описанные в результатах измерений базовой системы физические величины включали в себя скорость и/или местонахождение и/или ошибку часов приемника глобальной спутниковой системы навигации и/или ошибку дрейфа часов приемника глобальной спутниковой системы навигации. Эти величины можно определить непосредственно из корректирующих систем, в особенности, если речь идет о глобальной спутниковой системе навигации и одометрической навигационной системе.
Помимо этого предпочтительно предусмотрено, чтобы начальные значения определялись пошагово из результатов измерений, по меньшей мере, одной корректирующей системы. Отсюда вытекает преимущество, заключающееся в том, что учитывается скорость инициализаций и, при известных обстоятельствах, последующие свойства различных корректирующих систем, вследствие чего обеспечивается возможность индивидуально согласованного  предоставления результатов измерений в качестве начальных значений. Следовательно, начальные значения предоставляются в той временной последовательности, в которой они выводятся корректирующей системой.
предоставления результатов измерений в качестве начальных значений. Следовательно, начальные значения предоставляются в той временной последовательности, в которой они выводятся корректирующей системой.
Помимо этого, в особенности предпочитается сначала определять начальные значения из результатов измерений одометрической навигационной системы. Преимущество одометрической навигационной системы заключается в том, что она может фиксировать сигналы вращения колес непосредственно при старте транспортного средства и, таким образом, может непосредственно при старте транспортного средства определить скорость. Помимо этого, сигналы вращения колес имеют особое значение для безопасности транспортного средства, т.к. они используются не только для определения скорости, но и для различных систем помощи водителю, как например, ABS или ESC.
Предпочтительно, чтобы значения погрешности распознавались и, в особенности, исправлялись посредством фильтра error state space, в особенности, посредством фильтра Калмана error state space. Фильтр error state space представляет собой фильтр слияния, предназначенный для объединения результатов измерений, в особенности для объединения результатов измерений, имеющих нормальное распределение. В то же время фильтр error state space оценивает или также определяет предпочтительно значения погрешности, по меньшей мере, базовой системы. Базовой системой является предпочтительно инерциальная навигационная система автотранспортного средства. С помощью корректирующих систем затем можно оценить или также определить значения погрешности и, при известных обстоятельствах, также неизвестные величины инерциальной навигационной системы. Особенностью фильтра error state space, следовательно, является то, что вместо сигналов датчиков или также результатов измерений пошагово оцениваются или также определяются и вслед за этим исправляются лишь значения погрешности. Дело в том, что значения погрешности имеют существенно более низкую временную динамику чем сами результаты измерений, вследствие чего достигается значительное отделение динамики фильтра error state space от свойств базовой системы или также, по меньшей мере, одной корректирующей системы, вследствие чего достигается значительное отделение динамики фильтра error state space от свойств датчиков.
Другой особенностью фильтра Калмана error state space является то, что вследствие внесения исправления, оцененные или также определенные значения погрешности после каждого цикла работы фильтра Калмана error state space равны нулю, вследствие чего в следующем цикле работы выпадает шаг прогнозирования для предсказания значений погрешности, вследствие чего сокращается объем вычислений фильтра Калмана error state space.
Настоящее изобретение относится далее к системе для инициализации системы сочетания датчиков, причем система сочетания датчиков включает в себя одну базовую систему и, по меньшей мере, одну корректирующую систему, причем базовая система и, по меньшей мере, одна корректирующая система выполнены для сбора результатов измерений, причем результаты измерений описывают прямо или косвенно физические величины, причем результаты измерений в каждом случае содержат значения погрешности, причем значения погрешности описывают отклонения результатов измерений от описанных физических величин, причем система сочетания датчиков выполнена таком образом, что, по меньшей мере, косвенно описанные в результатах измерений базовой системы физические величины, а также значения их погрешности невозможно определить во время инициализации системы сочетания датчиков, причем система сочетания датчиков выполнена для того, чтобы результаты измерений после завершения инициализации непрерывно сливались в объединенный набор данных и причем система сочетания датчиков выполнена для того, чтобы, по меньшей мере, для одной из косвенно описанных в результатах измерений базовой системы физических величин, а также для значений ее погрешности, определять начальные значения из результатов измерений, по меньшей мере, одной корректирующей системы. Система согласно данному изобретению включает в себя, таким образом, все устройства, необходимые для исполнения способа согласно данному изобретению.
Предпочтительно предусмотрено, чтобы система была выполнена для осуществления способа согласно данному изобретению.
Помимо этого, настоящее изобретение относится к использованию системы согласно данному изобретению в автотранспортном средстве.
Дальнейшие предпочтительные формы осуществления следуют из дополнительных пунктов патентной формулы и следующего описания примера осуществления со ссылкой на чертежи, на которых изображено:
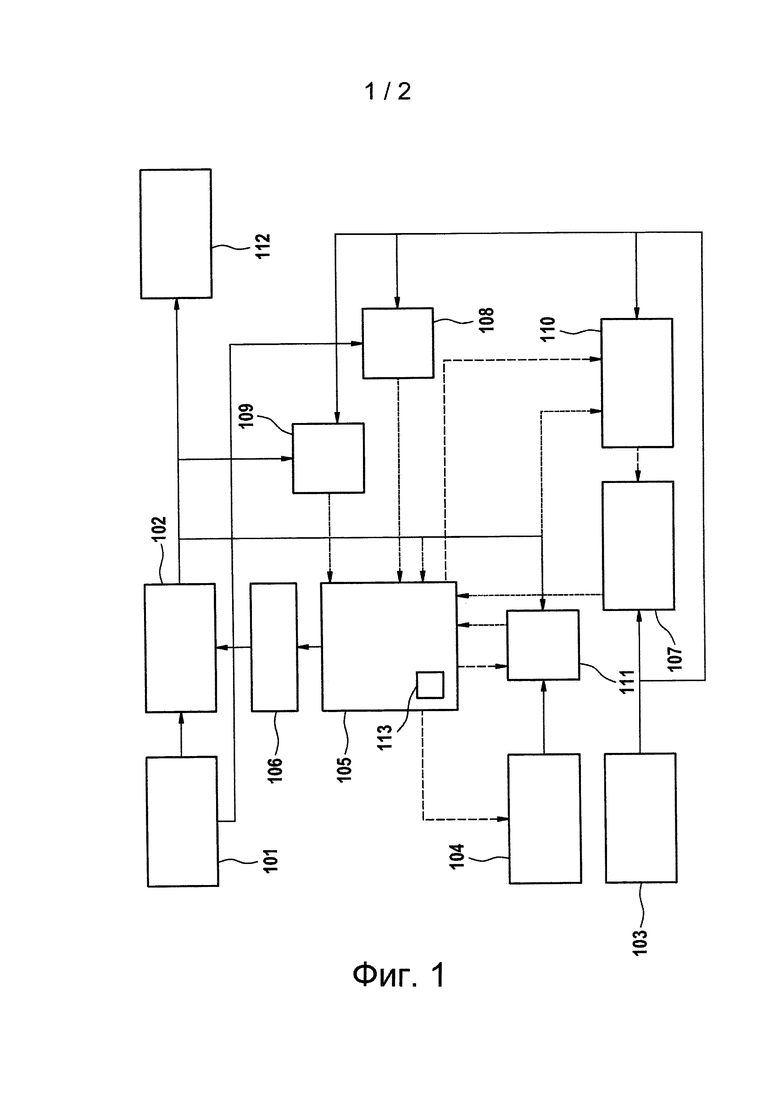
на Фиг. 1 в качестве примера, возможная форма выполнения системы согласно данному изобретению, которая выполнена для определения местоположения, в автотранспортном средстве и
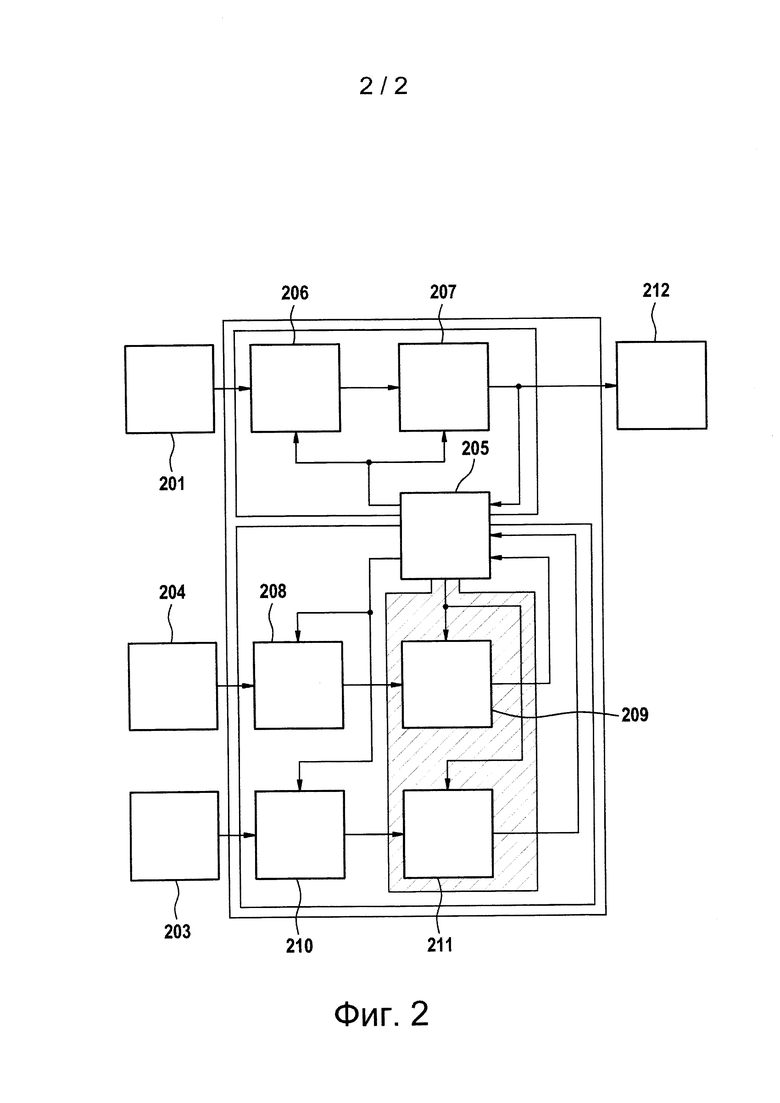
на Фиг. 2 в качестве примера, другая возможная форма выполнения системы согласно данному изобретению, которая также выполнена для определения местоположения, в автотранспортном средстве.
На Фиг. 1 приведено схематическое изображение варианта осуществления системы согласно данному изобретению, предназначенной для размещения и использования в автотранспортном средстве (не изображено). Представленная система сочетания датчиков, согласно примеру, выполнена для определения местоположения автотранспортного средства. При этом наглядно показаны в качестве функциональных блоков все включенные в систему элементы или также составные части или также базовая система или также корректирующие системы и представлено их взаимодействие между собой.
Система сочетания датчиков включает в себя инерциальную навигационную систему 101, выполненную таким образом, что она может регистрировать, по меньшей мере, ускорение вдоль первой, второй и третьей оси, а также частоту вращения вокруг первой, второй и третьей оси. Первая ось соответствует при этом согласно примеру продольной оси автотранспортного средства, вторая ось соответствует поперечной оси автотранспортного средства и третья ось соответствует вертикальной оси автотранспортного средства. Эти три оси представляют декартову систему координат, так называемую декартову систему координат автотранспортного средства.
Инерциальная навигационная система 101 представляет, согласно примеру, так называемую базовую систему, результаты измерений которой исправляются посредством описанных далее так называемых корректирующих систем. Корректирующими системами при этом являются одометрическая навигационная система 103 и спутниковая система навигации 104.
Система сочетания датчиков обладает также так называемым блоком алгоритма strap-down 102, в котором осуществляется так называемый алгоритм strap-down, с помощью которого пересчитываются в параметры местонахождения результаты измерений навигационной системы с инерциальными датчиками 101 и др. Для этого дважды за время интегрируются результаты измерений навигационной системы с инерциальными датчиками 101, описывающие, в соответствии со своими свойствами, ускорения. Также определяется направление автотранспортного средства, посредством проведенной дважды за время интеграции соответствующих результатов измерений навигационной системы с инерциальными датчиками 101. Посредством обычной интеграции за время определяются далее направление и скорость автотранспортного средства. Помимо этого, единица алгоритма strap-down 102 компенсирует силу Кориолиса, действующую на навигационную систему с инерциальными датчиками 101.
Исходные данные единицы алгоритма strap-down 102 включают в себя, следовательно, следующие физические величины: скорость, ускорение, а также частота вращения автотранспортного средства, согласно примеру, относительно названных трех осей системы координат автотранспортного средства и, согласно примеру, дополнительно в каждом случае по отношению к мировой системе координат, пригодной для описания направления или также динамических величин автотранспортного средства в мире. Согласно примеру, названной мировой системой координат является система координат GPS. Помимо этого, исходные данные единицы алгоритма strap-down 102 включают в себя местонахождение относительно системы координат автотранспортного средства и направление по отношению к мировой системе координат. Дополнительно исходные данные единицы алгоритма strap-down 102 демонстрируют дисперсии в качестве информации о качестве данных вышеуказанных физических величин. Эти дисперсии, согласно примеру, не вычисляются в блоке алгоритма strap-down 102, но он их использует и направляет дальше. Вышеуказанные физические величины, вычисленные единицей алгоритма strap-down 102, выводятся через модуль вывода 112 и предоставляются другим системам автотранспортного средства.
Система сочетания датчиков включает в себя, помимо этого, одометрическую навигационную систему 103 в форме датчиков частоты вращения колес для каждого колеса автотранспортного средства. Согласно примеру, речь идет о четырехколесном транспортном средстве с четырьмя датчиками частоты вращения колес, регистрирующих в каждом случае частоту вращения, сопряженного с ним колеса, а также направление его вращения. Далее, одометрическая навигационная система 103 включает в себя элемент датчика угла поворота рулевого колеса, который фиксирует угол поворота. Дополнительно одометрическая навигационная система 103, согласно примеру, предоставляет фильтру слияния 105 стартовую скорость или также информацию о стартовой скорости, по меньшей мере, при старте или также включении, или также инициализации системы сочетания датчиков.
Помимо этого, система сочетания датчиков, представленная в качестве примера, обладает спутниковой системой навигации 104, выполненную таким образом, что она определяет расстояние в каждом случае между сопряженным с ним сателлитом и автотранспортным средством, а также скорость в каждом случае между сопряженным с ним сателлитом и автотранспортным средством. Дополнительно спутниковая система навигации 104, согласно примеру, предоставляет фильтру слияния 105 стартовое положение или также информацию о стартовом положении, по меньшей мере, при старте, или также включении, или также инициализации системы сочетания датчиков.
Система сочетания датчиков включает в себя, помимо этого, фильтр слияния 105. Фильтр слияния 105 предоставляет в ходе совместной обработки данных измерений одометрической навигационной системы 103, спутниковой системы навигации 104 и навигационной системы с инерциальными датчиками 101 объединенный набор данных 106. Объединенный набор данных 106 предоставляет зафиксированные данные измерений различных систем датчиков, причем объединенный набор данных 106, согласно примеру, дополнительно включает в себя значения погрешности и сопряженные с ними дисперсии, описывающие качество данных.
Данные измерений или также показатели навигационной системы с инерциальными датчиками 101 сохраняются на заданный период во время движения автотранспортного средства в предназначенном для этих целей электронном запоминающем устройстве 113 фильтром слияния 105. Инерциальная навигационная система 101 представляет собой при этом так называемую базовую систему, тогда как одометрическая навигационная система 103 и спутниковая система навигации 104 представляют собой так называемые корректирующие системы, результаты измерений которых привлекаются для исправления результатов измерений базовой системы. Таким образом обеспечивается надежность того, что показатели, которые, по меньшей мере, предположительно зафиксированы в один и тот же момент времени, всегда могут быть подвергнуты сравнению.
Предоставленный фильтром слияния 105 объединенный набор данных 106 включает в себя, согласно примеру, количественные погрешности базовой системы, определенные посредством проверенных на достоверность результатов измерений корректирующих систем.
Блок алгоритма strap-down 102 исправляет теперь результаты измерений базовой системы посредством объединенного набора данных 106.
Объединенный набор данных 106 вычисляется фильтром слияния 105 из результатов измерений одометрической навигационной системы 103, спутниковой системы навигации 104 и инерциальной навигационной системы 101.
Фильтр слияния 105, согласно примеру, выполнен как фильтр Калмана error state space, т.е. как фильтр Калмана, который, в особенности, осуществляет линеаризацию результатов измерений и в котором вычисляются или также оцениваются количественные значения погрешности результатов измерений и который работает последовательно и при этом исправляет результаты измерений, доступные в соответствующем шаге операции последовательности.
Фильтр слияния 105 выполнен таким образом, что он всегда асинхронно фиксирует самые актуальные доступные результаты измерений инерциальной навигационной системы 101, одометрической навигационной системы 103 и спутниковой системы навигации 104. Согласно примеру, результаты измерений проводятся при этом через блок модели транспортного средства 107 и блок модели направления 109.
Блок модели транспортного средства 107 выполнен таким образом, что он вычисляет из результатов измерений одометрической навигационной системы 103, по меньшей мере, скорость вдоль первой оси, скорость вдоль второй оси, а также частоту вращения вокруг третьей оси и предоставляет это фильтру слияния 105.
Соответствующая примеру система сочетания датчиков включает в себя, помимо этого, блок расчета параметров шин 110, выполненный таким образом, что он вычисляет, по меньшей мере, радиус, согласно примеру, динамический радиус всех колес и дополнительно вычисляет жесткость колеса при боковом уводе и жесткость скольжения всех колес и предоставляет это блоку модели транспортного средства 107 в качестве дополнительных исходных величин. Блок расчета параметров шин 110 выполнен далее таким образом, что для расчета размера шины он использует главным образом линейную модель шины.
Исходными величинами блока расчета параметров шин 110, согласно примеру, являются частота вращения колес и описанные для угла поворота рулевого колеса результаты измерений, по меньшей мере, частично, начальные значения блока алгоритма strap-down 102, а также дисперсии, определенные фильтром слияния 105.
Система сочетания датчиков, согласно примеру, включает в себя, помимо этого, блок обнаружения помех и проверки достоверности GPS 111, выполненный таким образом, что он, согласно примеру, получает в качестве исходных данных и учитывает при расчетах результаты измерений спутниковой системы навигации 104, а также, по меньшей мере, частично, результаты измерений блока алгоритма strap-down 102. Блок обнаружения помех и проверки достоверности GPS 111 проверяет результаты измерений по стохастической модели, согласованной со спутниковой системой навигации 104. В случае, если результаты измерений в рамках допустимых отклонений с учетом шумовых помех соответствую модели, их достоверность подтверждается.
При этом блок обнаружения помех и проверки достоверности GPS 111 дополнительно связан на уровне данных с фильтром слияния 105 и передает проверенные на достоверность результаты измерений фильтру слияния 105.
Блок обнаружения помех и проверки достоверности GPS 111 выполнен таким образом, что он, согласно примеру, для выбора спутника выполняет процедуру, состоящую в том числе из следующих приемов:
- Измерение параметров местонахождения автотранспортного средства по отношению к спутнику на основе сигналов датчика спутниковой системы навигации 104,
- Определение избыточных для измеренных на основе сигналов датчика спутниковой системы навигации 104 параметров местонахождения исходных параметров местонахождения автотранспортного средства,
- Выбор спутника, если сопоставление параметров местонахождения и исходных параметров местонахождения удовлетворяет предопределенному условию,
- причем для сопоставления параметров местонахождения и исходных параметров местонахождения создается разность между параметрами местонахождения и исходными параметров местонахождения,
- причем предопределенное условие является максимально допустимым отклонением параметров местонахождения от исходных параметров местонахождения,
- причем максимально допустимое отклонение зависит от стандартного отклонения, которое вычисляется на основе суммы из исходной дисперсии для исходных параметров местонахождения и дисперсии измерения для параметров местонахождения и
- причем максимально допустимое отклонение таким образом соответствует кратному стандартного отклонения, что вероятность того, что параметры местонахождения попадают в зависящий от стандартного отклонения интервал рассеяния, не достигает предопределенного порогового значения.
Система сочетания датчиков, согласно примеру, обладает, помимо этого, блоком распознавания неподвижного состояния 108, выполненным таким образом, что он может распознать неподвижное состояние автотранспортного средства и предоставляет, в случае распознанного неподвижного состояния автотранспортного средства, по меньшей мере, фильтру слияния 105 информацию из модели в неподвижном состоянии. При этом, информация из модели в неподвижном состоянии описывает, что частота вращения по всем трем осям равна нулю и что скорость вдоль всех трех осей равна нулю.
Блок распознавания неподвижного состояния 108 при этом выполнен, согласно примеру, таким образом, что он пользуется в качестве исходных данных данными результатов измерений датчиков частоты вращения колес одометрической навигационной системы 103, а также результатами измерений инерциальной навигационной системы 101.
Система сочетания датчиков использует, согласно примеру, первую группу результатов измерений, относящихся к системе координат автотранспортного средства и дополнительно вторую группу результатов измерений, относящихся к мировой системе координат, причем мировая система координат используется для описания направления и динамических величин автотранспортного средства. Посредством блока модели направления 109 определяется угол направления между системой координат автотранспортного средства и мировой системой координат.
Угол направления между системой координат автотранспортного средства и мировой системой координат, определенный блоком модели направления 109, определяется при этом на основе следующих физических величин:
- векторной скорости относительно мировой системы координат,
- векторной скорости относительно системы координат автотранспортного средства,
- угла поворота и
- соответствующих количественных погрешностей в названных величинах описанных данных измерений или показателей.
Блок модели направления 109 пользуется при этом всеми исходными данными блока алгоритма strap-down 102. Блок модели направления 109 выполнен, согласно примеру, таким образом, что он вычисляет и предоставляет фильтру слияния 105 дополнительно к углу направления еще и информацию о качестве данных угла направления в форме дисперсии.
Фильтр слияния 105 использует угол направления и дисперсию угла направления в своих расчетах, результаты которых он передает через объединенный набор данных 106 блоку алгоритма strap-down 102.
Фильтр слияния 105 фиксирует таким образом данные измерений инерциальной навигационной системы 101, базовой системы, а также одометрической навигационной системы 103 и спутниковой системы навигации 104, корректирующих систем.
При инициализации показательной системы сочетания датчиков инициализируются все включенные в систему сочетания датчиков системы датчиков, т.е. базовая система 101 и обе названные корректирующие системы 103 и 104, а также фильтр слияния 105. Для правильного режима работы, фильтр слияния 105, непосредственно после инициализации, нуждается также в прямо и косвенно описанных в результатах измерений базовой системы 101 физических величинах, которые исправляются посредством результатов измерений корректирующих систем 103 и 104 или также значения чьих погрешностей определяются посредством результатов измерений корректирующих систем 103 и 104. Вследствие того, что косвенно описанные в результатах измерений базовой системы 101 физические величины, такие, как например, местонахождение и скорость транспортного средства, еще не могут быть определены, для этого определяются начальные значения из результатов измерений корректирующих систем 103 и 104. Одометрическая навигационная система 103 определяет, согласно примеру, скорость транспортного средства и предоставляет ее фильтру слияния 105 в качестве начального значения для определения скорости.
Также одометрическая навигационная система 103 передает фильтру слияния 105 имманентную неточность измерения в качестве начального значения для значения погрешности скорости. Как только спутниковая система навигации 104 произвела первое определение местонахождения, также и местонахождение, определенное таким образом, передается фильтру слияния 105 в качестве начального значения для местонахождения. В то же время дисперсия на основе неточности измерения определенного местонахождения выдается фильтру слияния 105 в качестве значения погрешности определенного местонахождения. Обозначенное в качестве начального значения местонахождение, а также неточность измерения местонахождения определяются при этом в рамках предварительной обработки результатов измерений спутниковой системой навигации 104. Также определяется в рамках предварительной обработки одометрической навигационной системы 103 обозначенная в качестве начального значения скорость, но не неточность измерения, которая привлекается в качестве начального значения для значения погрешности. Она берется, согласно примеру, из спецификации датчиков отдельно взятых датчиков частоты вращения колес. Таким образом, фильтру слияния 105 уже во время инициализации предоставляется вся информация, необходимая для правильного режима работы.
На Фиг. 2 в качестве примера, показана другая возможная форма выполнения системы сочетания датчиков, которая также выполнена для определения местоположения, в автотранспортном средстве (не изображено). Система сочетания датчиков включает в себя, согласно примеру, инерциальную навигационную систему 201, спутниковую систему навигации 204 и одометрическую навигационную систему 203 в качестве различных систем датчиков. Инерциальная навигационная система 201, спутниковая система навигации 204 и одометрическая навигационная система 203 выдают фильтру слияния 205 результаты измерений, описывающие прямо или также косвенно физические величины, а именно местонахождение, скорость, ускорение, направление, степень рыскания или также ускорение рыскания. Выдача результатов измерений осуществляется при этом через шину данных транспортного средства, согласно примеру, через так называемую CAN-шину. Согласно примеру, спутниковая система навигации 204 выдает результаты своих измерений в форме необработанных данных.
В качестве центрального элемента при определении местоположения автотранспортного средства используется инерциальная навигационная система 201, так называемая MEMS-IMU (Micro-Electro-Mechanical-System-Inertial Measurement Unit) в комбинации с блоком алгоритма strap-down 207, так как она считается безошибочной, т.е. предполагается, что показатели инерциальной навигационной системы 201 всегда соответствуют своей стохастической модели и подвержены лишь влиянию шумов и, таким образом, не зависят от внешних и случайных погрешностей или также помех. Шум, а также постоянные, не моделируемые погрешности инерциальной навигационной системы 201, как например, нелинейность, принимаются через диапазон измерений как не имеющие среднего значения, постоянные и распределенные по нормальному закону (так называемый белый гауссовский шум).
Инерциальная навигационная система 201 включает в себя три, зафиксированные по отношению друг к другу в каждом случае ортогонально, датчика частоты вращения и три, зафиксированные по отношению друг к другу в каждом случае ортогонально, датчика ускорения.
Спутниковая система навигации 204 включает в себя GPS-приемник, который сперва по времени прохождения сигнала от спутника производит измерения расстояния до спутника GPS, сигнал которого он принимает, и, помимо этого, определяет из изменений времени прохождения сигнала от спутника, а также, дополнительно из изменений количества длины волны сигналов спутника, отрезок пути, который преодолело автотранспортное средство. Одометрическая навигационная система 203 включает в себя в каждом случае один датчик частоты вращения колес на каждом колесе автотранспортного средства, а также датчик угла поворота рулевого колеса. Датчики частоты вращения колес определяют в каждом случае скорость вращения колес, сопряженного с ними колеса, и датчик угла поворота рулевого колеса определяет угол заданного поворота.
Инерциальная навигационная система 201 выдает результаты своих измерений блоку предварительной обработки 206 навигационной системы с инерциальными датчиками 201. Блок предварительной обработки 206 исправляет затем результаты измерений или также описанные в них физические величины посредством значений поправки, которые содержатся в блоке предварительной обработки 206 фильтра слияния 205. Исправленные таким образом результаты измерений или также описанные в них физические величины передаются дальше блоку алгоритма strap-down 207.
Теперь блок алгоритма strap-down 207 производит на основании исправленных данных измерений или также показателей блока предварительной обработки 206 определение местоположения. Это определение местоположения является при этом так называемой навигацией по счислению пути на основе инерциальной навигационной системы 201. Для этого выданные блоком предварительной обработки 206 исправленные результаты измерений или также описанные в них физические величины за это время интегрируются в непрерывном режиме или также суммируются. Блок алгоритма strap-down 207 продолжает компенсировать силу Кориолиса, действующую на навигационную систему с инерциальными датчиками 201, которая может повлиять на данные измерений инерциальной навигационной системы 201. Для определения местоположения блок алгоритма strap-down 207 дважды производит интеграцию зафиксированных системой с инерциальными датчиками 201 результатов измерений, описывающих ускорения во времени. Это позволяет продолжить запись уже известного местонахождения, а также продолжить запись уже известного направления автотранспортного средства. Для определения скорости или также частоты вращения автотранспортного средства блок алгоритма strap-down 207 производит простую интеграцию зафиксированных системой с инерциальными датчиками 201 данных измерений или также показателей во времени. Далее блок алгоритма strap-down 207 исправляет также обозначенное местонахождение посредством соответствующих значений поправок фильтра слияния 205. Фильтр слияния 205 производит в этом примере проверку лишь косвенно через блок алгоритма strap-down 207. Определенные и исправленные блоком алгоритма strap-down 207 результаты измерений или также физические величины, т.е. местонахождение, скорость, ускорение, направление, частота вращения и ускорение вращения автотранспортного средства передаются теперь модулю вывода 212 и фильтру слияния 205.
Проведенный блоком алгоритма strap-down 207 так называемый алгоритм strap-down является при этом не очень комплексным для вычислений и поэтому может быть выполнен как базовая система, пригодная в реальном времени. Он представляет последовательность действий для интеграции результатов измерений инерциальной навигационной системы 201 для скорости, направления и местонахождения и не содержит фильтрации, таким образом следует приблизительно константное время задержки и групповое время задержки. Понятие базовая система описывает при этом такую систему датчиков, данные измерений которой или также показатели посредством данных измерений или также показатели других систем датчиков, так называемых корректирующих систем, исправляются. Согласно примеру, как уже упоминалось, корректирующими системами являются одометрическая навигационная система 203 и спутниковая система навигации 204.
Инерциальная навигационная система 201, блок предварительной обработки 206 системы с инерциальными датчиками 201 и блок алгоритма strap-down 207, согласно примеру, вместе составляют так называемую базовую систему, к которой частично относится дополнительно и фильтр слияния 205.
Модуль вывода 212 передает любым другим системам автотранспортного средства определенные и исправленные блоком алгоритма strap-down 207 физические величины.
Результаты измерений, зафиксированные спутниковой системой навигации 204, согласно примеру, передаются в форме сигналов датчика через так называемый канал для передачи данных UART сперва блоку предварительной обработки 208 спутниковой системы навигации 204. Блок предварительной обработки 208 теперь определяет на основании выданных спутниковой системой навигации 204 результатов измерений, которые представляют собой необработанные данные GPS и также включают в себя описание траектории полета спутника GPS, посылающего в каждом случае сигналы GPS, местонахождение и скорость автотранспортного средства в системе координат GPS. Помимо этого, спутниковая система навигации 204 определяет относительную скорость автотранспортного средства в отношении спутников GPS, от которых принимаются сигналы GPS. Далее блок предварительной обработки 208 исправляет содержащуюся в результатах измерений погрешность времени часов приемника спутниковой системы навигации 204, которая появляется вследствие дрейфа часов приемника, а также, посредством модели коррекции, изменения во времени прохождения сигнала и пути сигнала, вызванные атмосферными воздействиями на посланные спутниками GPS сигналы GPS. Исправление погрешности времени, а также атмосферных воздействий производится посредством значений поправки, полученных от фильтра слияния 205 через CAN-шину.
Далее со спутниковой системой навигации 204 сопряжен модуль проверки достоверности 209, который проверяет на достоверность выданные блоком предварительной обработки 208 результаты измерений физических величин, т.е. физические величины местонахождения и скорости автотранспортного средства. Проверенные на достоверность модулем проверки достоверности 209 данные измерений или также показатели, предаются затем фильтру слияния 205.
Далее система включает в себя блок предварительной обработки 210 одометрической навигационной системы 203, получающей через CAN-шину результаты измерений, зафиксированные одометрической навигационной системой 203. Зафиксированными результатами измерений в этом случае являются результаты измерений отдельных датчиков частоты вращения колес, а также результаты измерений датчика угла поворота рулевого колеса. Блок предварительной обработки 210 теперь определяет из выданных одометрической навигационной системой 203 результатов измерений, в соответствии с процедурой навигации по счислению пути, местонахождение и направление автотранспортного средства в системе координат автотранспортного средства. Далее определяются скорость, ускорение, частота вращения и ускорение вращения автотранспортного средства, также в системе координат автотранспортного средства. Помимо этого, блок предварительной обработки 210 исправляет полученные от одометрической навигационной системы 203 данные измерений или также показатели посредством значений поправки, полученных от фильтра слияния 205.
Далее с одометрической навигационной системой 203 сопряжен модуль проверки достоверности 211, который проверяет на достоверность выданные блоком предварительной обработки 210 результаты измерений, т.е. местонахождение, скорость, ускорение, частота вращения и ускорение вращения автотранспортного средства. Вследствие того, что помехи в результатах измерений одометрической навигационной системы 203 часто являются случайными помехами, обусловленными влиянием окружающей среды, которые не соответствуют белому шуму, например при сравнительно большом проскальзывание колеса, в целях подтверждения достоверности результатов измерений одометрической навигационной системы 203, используются результаты измерений, определенные посредством инерциальной навигационной системы 201 и посредством спутниковой системы навигации 204. Но сперва также и здесь результаты измерений сопоставляются с сопряженной с ними индивидуальной моделью датчика, учитывающей такие неточности в измерении, как воздействие шума. В случае, если результаты измерений соответствуют модели в пределах заданных предельных значений или также диапазона допустимых отклонений, тут происходит первая проверка достоверности и, проверенные на достоверность таким образом значения, обрабатываются дальше. Проверенные на достоверность показатели предаются затем дальше фильтру слияния 205. В случае, если проверка достоверности этих результатов измерений не может быть проведена, соответствующие результаты измерений отбрасываются и дальше не обрабатываются.
При этом единичные модули - модуль проверки достоверности 209 и модуль проверки достоверности 211 составляют совместно, при частичном вовлечении фильтра слияния 205, модуль проверки достоверности в контексте изобретения.
Фильтр слияния 205, согласно примеру, выполнен как фильтр Калмана error state space. Основной задачей фильтра слияния 205, согласно примеру, является исправление или также вывод блоку алгоритма strap-down 207 соответствующих значений поправок результатов измерений базовой системы, т.е. инерциальной навигационной системы 201, посредством результатов измерений одометрической навигационной системы 203 и спутниковой системы навигации 204, являющимися корректирующими системами. Вследствие того, что инерциальная навигационная система 201, согласно примеру, предполагается свободной от случайных погрешностей и внешних помех, результаты измерений инерциальной навигационной системы 201 подвержены исключительно белому шуму. Вследствие различных задержек выдачи сигнала инерциальной навигационной системы 201, одометрической навигационной системы 203 и спутниковой системы навигации 204, результаты измерений инерциальной навигационной системы 201 сохраняются в не представленном здесь электронном запоминающем устройстве за промежуток времени в 25 периодов измерения. Таким образом, обеспечивается надежность того, что как для результатов измерений одометрической навигационной системы 203, так и спутниковой системы навигации 204 имеются для подтверждения достоверности, или также исправления, или также слияния результаты измерений инерциальной навигационной системы 201, зафиксированные в один и тот же момент времени. Вследствие того, что фильтр слияния 205 является так называемым фильтром Калмана error state space, определяются исключительно количественные значения погрешности результатов измерений и производятся соответствующие исправления. Это упрощает и ускоряет слияние фильтром слияния 205 в объединенный набор данных результатов измерений инерциальной навигационной системы 201, одометрической навигационной системы. 203 и спутниковой системы навигации 204. Таким образом обеспечивается возможность определения местоположения и исправление определения местоположения в реальном времени.
При инициализации описанной системы датчиков из результатов измерений одометрической навигационной системы 203 и спутниковой системы навигации 204 определяются начальные значения для тех физических величин, которые только косвенно описаны в результатах измерений инерциальной навигационной системы 201, а именно местонахождение, скорость, ошибка часов приемника спутниковой системы навигации 204 и ошибка дрейфа часов приемника спутниковой системы навигации 204. Также определяются начальные значения для значений погрешности в качестве дисперсии на основе неточностей измерений спутниковой системы навигации 204 и одометрической навигационной системы 203.
Система, показанная на Фиг. 2, представляет так называемый виртуальный датчик, причем инерциальная навигационная система 201, одометрическая навигационная система 203 и спутниковая система навигации 204 все же не являются составными частями виртуального датчика. Виртуальный датчик - это система, которая независимо от вида присоединенных систем датчиков - здесь инерциальная навигационная система 201, одометрическая навигационная система 203 и спутниковая система навигации 204 - всегда создает одни и те же исходные данные или также данные вывода. Опираясь на исходные данные или также данные вывода, нельзя определить какие системы датчиков присоединены к системе.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ и система верификации данных измерений | 2015 |
|
RU2692093C2 |
| СПОСОБ И СИСТЕМА ДЛЯ НАСТРОЙКИ НАВИГАЦИОННОЙ СИСТЕМЫ | 2015 |
|
RU2667667C2 |
| СПОСОБ И СИСТЕМА ОПРЕДЕЛЕНИЯ ТОЧНОГО МЕСТОНАХОЖДЕНИЯ ПРОМЫШЛЕННОГО ТРАНСПОРТНОГО СРЕДСТВА | 2012 |
|
RU2570571C2 |
| СПОСОБ КОМПЛЕКСИРОВАНИЯ ИНЕРЦИАЛЬНЫХ НАВИГАЦИОННЫХ СИСТЕМ И КОМБИНИРОВАННАЯ НАВИГАЦИОННАЯ СИСТЕМА | 1993 |
|
RU2082098C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ПОДВИЖНЫХ ОБЪЕКТОВ И КОМПЛЕКСИРОВАННАЯ НАВИГАЦИОННАЯ СИСТЕМА ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2009 |
|
RU2395061C1 |
| КОМПЛЕКСНАЯ СИСТЕМА ПОЗИЦИОНИРОВАНИЯ ПОДВИЖНЫХ ОБЪЕКТОВ НА ЦИФРОВОЙ МОДЕЛИ ПУТЕВОГО РАЗВИТИЯ СТАНЦИИ | 2012 |
|
RU2503567C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПРОСТРАНСТВЕННЫХ КООРДИНАТ ПОДВИЖНЫХ ОБЪЕКТОВ И КОМПЛЕКСНАЯ НАВИГАЦИОННАЯ СИСТЕМА ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2010 |
|
RU2443978C1 |
| АВТОМАТИЗИРОВАННАЯ СИСТЕМА НАВИГАЦИИ И ТОПОПРИВЯЗКИ | 2010 |
|
RU2439497C1 |
| СПОСОБ АВТОМАТИЗИРОВАННОГО ОПРЕДЕЛЕНИЯ НАВИГАЦИОННО-ТОПОГЕОДЕЗИЧЕСКИХ ПАРАМЕТРОВ | 2010 |
|
RU2431803C1 |
| Спутниковая инерциальная навигационная система для станций спутниковой связи | 2024 |
|
RU2836126C1 |
Изобретение относится к измерительной технике и может найти применение для инициализации системы сочетания измерительных датчиков. Технический результат - расширение функциональных возможностей. Для этого система сочетания датчиков включает в себя одну базовую систему (101, 201) и по меньшей мере одну корректирующую систему (103, 104, 203, 204), причем и базовая система (101, 201) и по меньшей мере одна корректирующая система (103, 104, 203, 204) фиксируют результаты измерений, причем результаты измерений описывают прямо или косвенно физические величины, причем результаты измерений в каждом случае содержат значения погрешности, причем значения погрешности описывают отклонения результатов измерений от описанных физических величин, причем, по меньшей мере, косвенно описанные в результатах измерений базовой системы (101, 201) физические величины, а также значения их погрешности невозможно определить во время инициализации системы сочетания датчиков, причем результаты измерений после завершения инициализации непрерывно сливаются в объединенный набор данных и причем по меньшей мере для одной из косвенно описанных в результатах измерений базовой системы (101, 201) физических величин, а также их погрешностей определяются начальные значения из результатов измерений по меньшей мере одной корректирующей системы (103, 104, 203, 204). 3 н. и 8 з.п. ф-лы, 2 ил.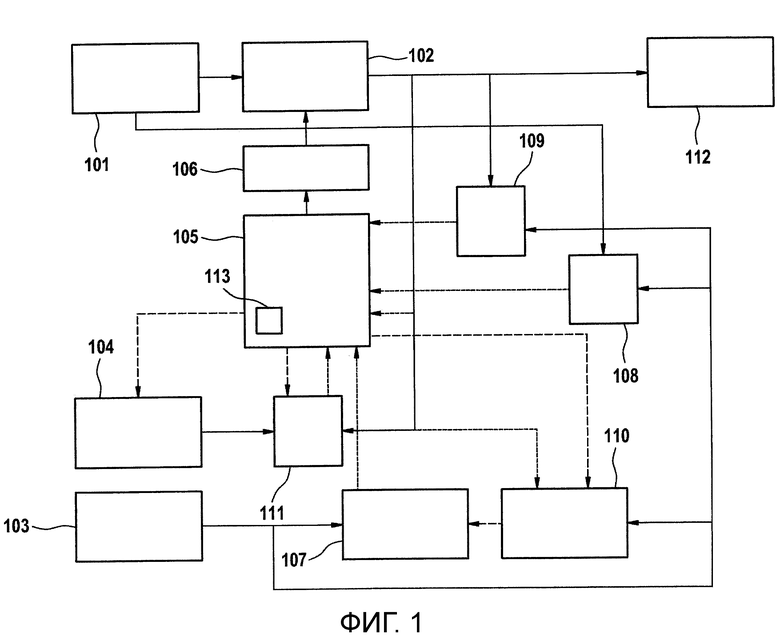
1. Способ для инициализации системы сочетания датчиков при загрузке или запуске системы сочетания датчиков,
причем система сочетания датчиков включает в себя одну базовую систему (101, 201) и по меньшей мере одну корректирующую систему (103, 104, 203, 204), выполненную в качестве глобальной спутниковой системы навигации (104, 204) и/или одометрической навигационной системы (103, 203),
причем и базовая система (101, 201) и по меньшей мере одна корректирующая система (103, 104, 203, 204) фиксируют результаты измерений,
причем результаты измерений описывают прямо или косвенно физические величины, причем результаты измерений в каждом случае содержат значения погрешности, причем значения погрешности описывают отклонения результатов измерений от описанных физических величин, причем по меньшей мере косвенно описанные в результатах измерений базовой системы (101, 201) физические величины, а также значения их погрешности невозможно определить во время инициализации системы сочетания датчиков и причем результаты измерений после завершения инициализации непрерывно сливаются в объединенный набор данных, отличающийся тем, что по меньшей мере для одной из косвенно описанных в результатах измерений базовой системы (101, 201) физических величин, а также значений ее погрешности во время инициализации определяются начальные значения из результатов измерений по меньшей мере одной корректирующей системы (103, 104, 203, 204), причем косвенно описанные в результатах измерений базовой системы (101, 201) физические величины включают в себя скорость и/или местонахождение и/или ошибку часов приемника глобальной спутниковой системы навигации (104, 204) и/или ошибку дрейфа часов приемника глобальной спутниковой системы навигации (104, 204), и значения погрешности распознаются посредством фильтра error state space (105, 205).
2. Способ по п. 1, отличающийся тем, что по меньшей мере одна корректирующая система (103, 104, 203, 204) определяет начальные значения посредством в каждом случае автономной обработки результатов измерений.
3. Способ по п. 1, отличающийся тем, что базовая система (101, 201) является инерциальной навигационной системой (101, 201).
4. Способ по п. 1, отличающийся тем, что начальные значения определяются для значений погрешности как дисперсии на основе неточностей измерений по меньшей мере одной корректирующей системы (103, 104, 203, 204).
5. Способ по п. 1, отличающийся тем, что начальные значения определяются пошагово из результатов измерений по меньшей мере одной корректирующей системы (103, 104, 203, 204).
6. Способ по п. 5, отличающийся тем, что сперва определяются начальные значения из результатов измерений одометрической навигационной системы (103, 203).
7. Способ по одному из пп. 1-6, отличающийся тем, что значения погрешности исправляются посредством фильтра Калмана error state space (105, 205).
8. Система для инициализации системы сочетания датчиков при загрузке или запуске системы сочетания датчиков, причем система сочетания датчиков включает в себя одну базовую систему (101, 201) и по меньшей мере одну корректирующую систему (103, 104, 203, 204), выполненную в качестве глобальной спутниковой системы навигации (104, 204) и/или одометрической навигационной системы (103, 203), причем базовая система (101, 201) и по меньшей мере одна корректирующая система (103, 104, 203, 204) выполнены для сбора результатов измерений, причем результаты измерений описывают прямо или косвенно физические величины, причем результаты измерений в каждом случае содержат значения погрешности, причем значения погрешности описывают отклонения результатов измерений от описанных физических величин, причем система сочетания датчиков выполнена таким образом, что по меньшей мере косвенно описанные в результатах измерения базовой системы (101, 201) физические величины, а также значения их погрешности невозможно определить во время инициализации системы сочетания датчиков и причем система сочетания датчиков выполнена для того, чтобы результаты измерений после завершения инициализации непрерывно сливались в объединенный набор данных, отличающаяся тем, что система сочетания датчиков выполнена для того, чтобы определять во время инициализации по меньшей мере для одной из косвенно описанных в результатах измерений базовой системы физических величин, а также их погрешностей, начальные значения из результатов измерений по меньшей мере одной корректирующей системы (103, 104, 203, 204), причем косвенно описанные в результатах измерений базовой системы (101, 201) физические величины включают в себя скорость и/или местонахождение и/или ошибку часов приемника глобальной спутниковой системы навигации (104, 204) и/или ошибку дрейфа часов приемника глобальной спутниковой системы навигации (104, 204), и значения погрешности являются распознаваемыми посредством фильтра error state space (105, 205).
9. Система по п. 8, отличающаяся тем, что значения погрешности являются исправляемыми посредством фильтра Калмана error state space (105, 205).
10. Система по п. 8 или 9, отличающаяся тем, что система выполнена для осуществления способа по одному из пп. 1-7.
11. Использование системы по одному из пп. 8-10 в автотранспортном средстве.
| US 2013138264 A1, 30.05.2013 | |||
| EP 1870669 A2, 26.12.2007 | |||
| WO 9428435 A1, 08.12.1994 | |||
| Способ обработки целлюлозных материалов, с целью тонкого измельчения или переведения в коллоидальный раствор | 1923 |
|
SU2005A1 |
| US 5054719 А1, 08.10.1991. | |||

