Изобретение относится к шагающим транспортным средствам с повышенной грузоподъемностью и проходимостью.
Универсальная самоходная платформа с большой грузоподъемностью ИТ-18 (фирменное обозначение) предназначена для работы в экстремальных природно-климатических условиях Арктики, Антарктики, Севера и пустыни.
В какой-то мере предлагаемое изобретение является модификацией патента РФ №2554270, заявл. 6.02.2014 - шагающего транспортного средства повышенной проходимости, в котором используется неразрезная балка трубчатого сечения. Указанное изобретение является прототипом. Главным отличием предлагаемого изобретения, является замена неразрезной трубы на спаренные 4-х секционные телескопические опорные консоли, с подпятниками на пневмооснове, обеспечивающие большую проходимость, скорость и высокую степень экологичности. Это происходит, за счет перераспределения функций работы передних и задних групп спаренных 4-х секционных телескопических опорных консолей - "балок-ног", по продольной оси:
- Передняя группа, выполняет функцию "лебедки" с зацепом за пневмоподпятники-домкраты с анкерами-зацепами..
- Задняя группа, выполняет функцию "толкача" с зацепом за пневмоподпятники-домкратами с анкерами-зацепами.
Две боковые группы спаренных 2-х секционных телескопических опорных консолей поперечной оси выполняют функцию "домкратов" для всей платформы, обеспечивающих смену местоположения спаренных 4-х секционных телескопических опорных консолей передней и задней групп продольной оси.
Еще одним значительным отличием данного изобретения от иных патентных аналогов, является включение пнемоподпятников-домкратов с анкерами-зацепами в непосредственную работу движательной системы. Функцию "Подпятника" выполняет 3-хсекционный пневмоподпятник-домкрат с анкером-зацепом и телескопической втулкой. Такая система подпятника, обеспечивает сохранность хрупкого покрова тундры, хорошее сцепление с грунтом и надежность передвижения больших грузов по сыпучим и скользким грунтовым покрытиям.
Таким образом, техническим результатом является - обеспечение работоспособности грузовой платформы при больших нагрузках, в любых природно-климатических условиях, на больших расстояниях по тундре, глубокому снежному покрову, торосистому льду, песчаному и каменистому грунту.
Основными конструктивными блоками ИТ-18 являются:
Блок 1 - Несущая платформа является мощной, сварной многослойной пространственной конструкцией, состоящей из элементов коробчатого сечения, изготовленных из мелкозернистой стали.
Внутри Блока 1 интегрированы Блоки 2,3,4,5.
Блок 2 - Поворотная платформа также является сварной пространственной конструкцией, которая монтируется на опорно-поворотное устройство. Здесь же находится балансировочный элемент.
Блок 3 - Опорно-поворотное устройство передает нагрузки от поворотной части платформы на неповоротную (ходовую) часть и обеспечивает вращение поворотной платформы с рабочим оборудованием. Блок 3 жестко связан с Блоком 1, а также с Блоком 2 с помощью опорно-поворотного устройства
Блок 4 - Передняя группа состоит из двух спаренных 4-х секционных телескопических опорных консолей, с пнемоподпятниками с анкерами-зацепами, расположена в передней части платформы, вдоль продольной оси и выполняет функцию "лебедки".
Блок 5 - Задняя группа состоит из двух спаренных 4-х секционных телескопических опорных консолей выполняет функцию "толкача" с опиранием на пневмоподпятники-домкраты с анкером-зацепом.
Блок 6 - Боковая группа состоит из четырех спаренных 2-х секционных телескопических опорных консолей, с пневмоподпятниками-домкратами с анкерами-зацепами расположены с 2 сторон вдоль поперечной оси.
Блоки 4,5 6 являются главной ходовой частью Универсальной самоходной платформы.
4-х и 2-х секционные телескопические опорные консоли имеют наиболее оптимальное сечение овального профиля с плоской верхней частью. В качестве материала используется высокопрочная мелкозернистая конструкционная сталь. Такое конструктивное решение, в комплексе с другими инновациями, обеспечивает максимальную грузоподъемность и жесткость, при относительно малом собственном весе телескопической консоли. В конструкции механизма телескопирования секций опорных консолей, применена система с одним гидроцилиндром и механизмом внутренней фиксации секций, под контролем автоматической системы управления выдвижением и втягиванием. Одна из секций, жестко закреплена к конструкции платформы, являясь удерживающим элементом для остальных мобильных секций телескопической опорной консоли. Блоки для тросов с целью снижения веса изготавливаются из полиамида.
Универсальная самоходная платформа характеризуется тем, что включает 3 группы спаренных 4-х секционных телескопических опорных консолей, с пневмоподпятниками-домкратами и анкерами-зацепами, обеспечивающими шагающее движение, движение происходит за счет перераспределения функций работы передней и задних спаренных консольных телескопических "балок-ног" Блоков 4, 5 продольной оси и боковой группы Блока 6, продольной оси.
- Передняя пара телескопических опорных консолей Блока 4 продольной оси, выполняет функцию "лебедки" с зацепом за пневмоподпятниками-домкратами с анкерами-зацепами.
Задняя пара телескопических опорных консолей Блока 5 продольной оси, выполняет функцию "толкача" с отталкиванием от пневмоподпятников-домкратов с анкерами-зацепами.
- Две боковые пары телескопические опорных консолей Блока 5, поперечной оси, выполняют функцию "домкратов" всей платформы, обеспечивающих смену местоположения консольных спаренных телескопических опорных консолей продольной оси.
Блок 7 - Кабина с системой управления перемещением платформы и погрузочно-разгрузочными работами размещается в кормовой части платформы.
Блок 8 - Силовая установка и трансмиссия устанавливаются за кабиной в отдельном блоке.
Дополнительное оборудование
Блок 9 - Топливные баки крепятся к консолям за контуром платформы.
Блок 10 - Погрузочно-разгрузочный блок включает - кран и лебедку Транспортировка
Габариты Универсальной самоходной платформы большой грузоподъемностью ИТ-18, в сгруппированном виде, соответствуют габаритам усиленной железнодорожной платформы 13,0×2,7 м.
Процесс развертывания платформы, монтажа или демонтажа модулей в основном выполняется собственными гидрофицированными механизмами платформы, и с помощью собственного крана.
Описание принципа движения
Универсальной самоходной платформы большой грузоподъемностью ИТ-18, для работы в экстремальных природно-климатических условиях Арктики, Антарктики, Севера и пустыни.
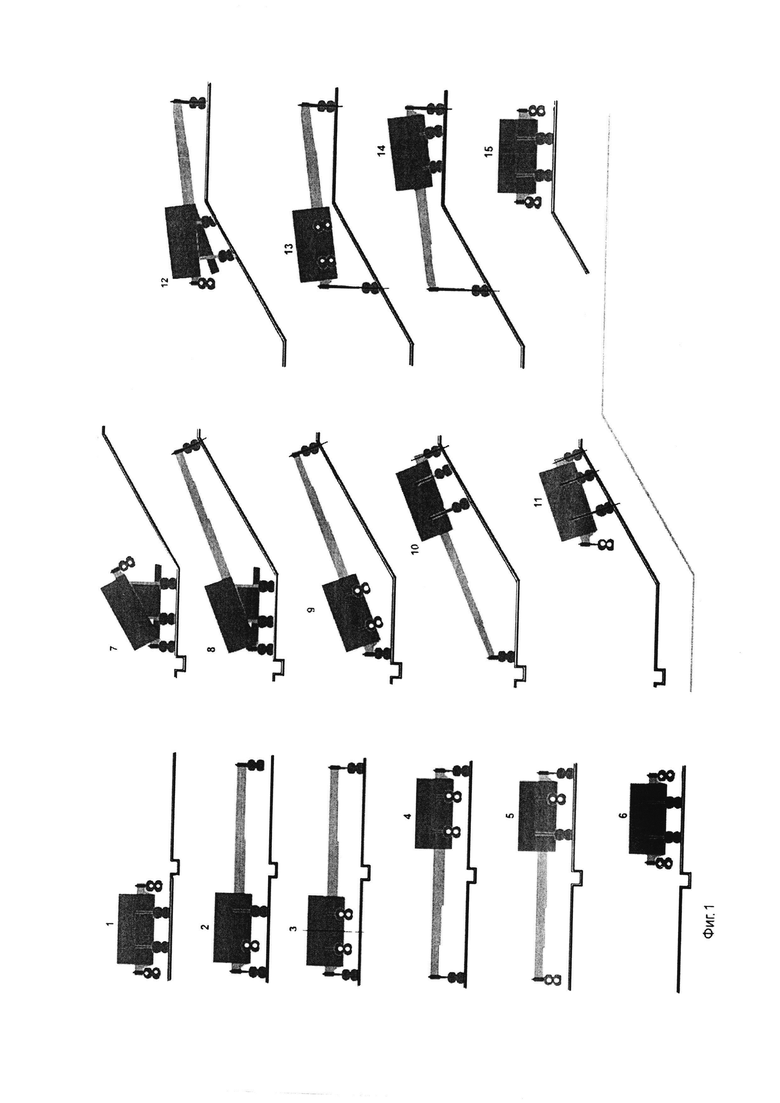
В процессе движения Универсальной самоходной платформы, 3 Блока телескопических опорных консолей, выполняют свои роли синхронно или автономно. Полный цикл одного"Шага" состоит из 7 этапов (См. Фиг. 1. Схема преодоления горизонтальных и вертикальных препятствий):
1. Боковая группа Блока 5 консолей, выполняя функцию "домкрата" поднимает всю платформу, вместе с телескопической консолью передней группы. Пневмоподпятники-домкраты с анкерами-зацепами задней группы опущены и остаются на земле.
2. Передняя группа Блока 4 выдвигается на необходимую длину, заанкиреваясь пневмоподпятником-домкратом с анкером-зацепом, поверхность земли, на необходимую глубину, в зависимости от нагрузки и типа грунтов.
3. Одновременно включаются в работу задняя группа консолей Блока 5 продольной оси и боковая группа консолей Блока 6:
Блок 6 сдувает пневмоподпятники-домкраты, поднимая их в ниши платформы.
- Передняя группа консолей Блока 4 с задней группой Блока 5 синхронно включается в работу, формируя «единую» кран-балку которая поднимает всю грузовую платформу на нужную высоту.
4. Передняя группа телескопической балки опоры Блока 4, зацепившись за анкер-зацеп, посекционное складываясь, начинает движение к заанкеренному пневмоподпятнику-домкрату. В это время, задняя группа телескопической балки опоры Блока 5 начинает выдвижение секций, подталкивая движение платформы, при этом сохраняя функцию кран-балки.
5. После достижения грузовой платформой контрольной точки, включаются в работу пневмодомкраты боковой группы Блока 6, фиксируя платформу на нужной высоте.
6. Передние и задние группы телескопических балок опор Блоков 4 и 5, складываясь соединяются с грузовой платформой.
7. Передняя группа Блок 4 освобождается от крепления с землей, подготавливаясь к следующему выдвижению.
Описание функционирования Универсальной самоходной платформы.
Описание функционирования Универсальной самоходной платформы, при преодолении горизонтальных и вертикальных препятствий соответствует нумерации позиций указанных на Схеме преодоления горизонтальных и вертикальных препятствий по Фиг. 1.
Позиции 1-6 показывают особенности преодоления горизонтальных препятствий:
1. Исходная позиция: Опирание всей Универсальной самоходной платформы на заднюю группу спаренных телескопических опорных консолей Блока 6. Передняя и задняя группы опорных телескопических опор Блоков 4 и 5, находятся в поднятом, вне рабочем состоянии.
2. Выдвижение передней группы, спаренных телескопических опорных консолей Блока 4 через горизонтальное препятствие.
3. Опирание передних и задних групп Блоков 4 и 5, спаренных телескопических опорных консолей с 3-хсекционными пневмоподпятниками-домкратами с анкерами-зацепами на землю и последующим подъемом всей Универсальной самоходной платформы.
4. Передвижение Универсальной самоходной платформы в сторону пневмоподпятников-домкратов с анкером-зацепом передней группы Блока 4. Продвижение вперед, происходит за счет складывания телескопической опоры, по принципу «лебедки», с креплением за анкер-зацеп пневмоподпятников-домкратов. Синхронно с передней телескопической группой опор Блока 4, задняя группа телескопических опор Блока 5, раскрывается, выполняя функцию «толкоча», помогает Универсальной самоходной платформы в движении вперед. Тем самым, снимает движительную нагрузку с передней группы телескопической опоры Блока 4. Такой технический прием значительно ускоряет продвижение Универсальной самоходной платформы.
5. Синхронное опускание телескопических опорных групп Блоков 4 и 6. Подъем пневмоподпятников-домкратов с анкерами-зацепами задней группы телескопических опор Блока 5
6. После складывания телескопической опоры задней группы телескопических опор Блока 5, Универсальная самоходная платформа становится в Исходную позицию
Позиции 7-15 показывают особенности преодоления вертикальных препятствий:
7. За счет смещения оси центра тяжести несущей платформы, происходит подъем передней группы телескопической опоры Блока 4 и опускания задней группы телескопической опоры телескопической опоры Блока 5. Угол подъема регулируется необходимостью преодоления вертикального препятствия.
8. Выдвижение передней группы телескопических опор Блока 4, с последующим опиранием на землю и креплением, с помощью пневмоподпятников-домкратов с анкеров-зацепов.
9. Опирание передних и задних групп Блоков 4 и 5, спаренных телескопических опорных консолей с 3-хсекционными пневмоподпятниками-домкратами с анкерами-зацепами на землю и последующим подъемом всей Универсальной самоходной платформы. Синхронно, боковая группа спаренных консолей Блока 6 поднимается в свои ниши.
10. Передвижение Универсальной самоходной платформы в сторону пневмоподпятников-домкратов с анкерами-зацепами передней группы телескопических опор Блока 4, за счет складывания телескопической опоры, по принципу «лебедки», с зацепом за анкер пневмоподпятников-домкратов с анкерами-зацепами передней группы телескопических опор Блока 4. Синхронно, задняя группа телескопических опор Блока 4, раскрывается, выполняя функцию «толкача», помогает Универсальной самоходной платформе движению вперед.
11. Складывая заднюю группу телескопических опор Блока 5 и фиксация Универсальной самоходной платформы в исходной позиции. Позиции 12-15 являются повторением первого этапа движения Универсальной самоходной платформы в позициях 7-11.
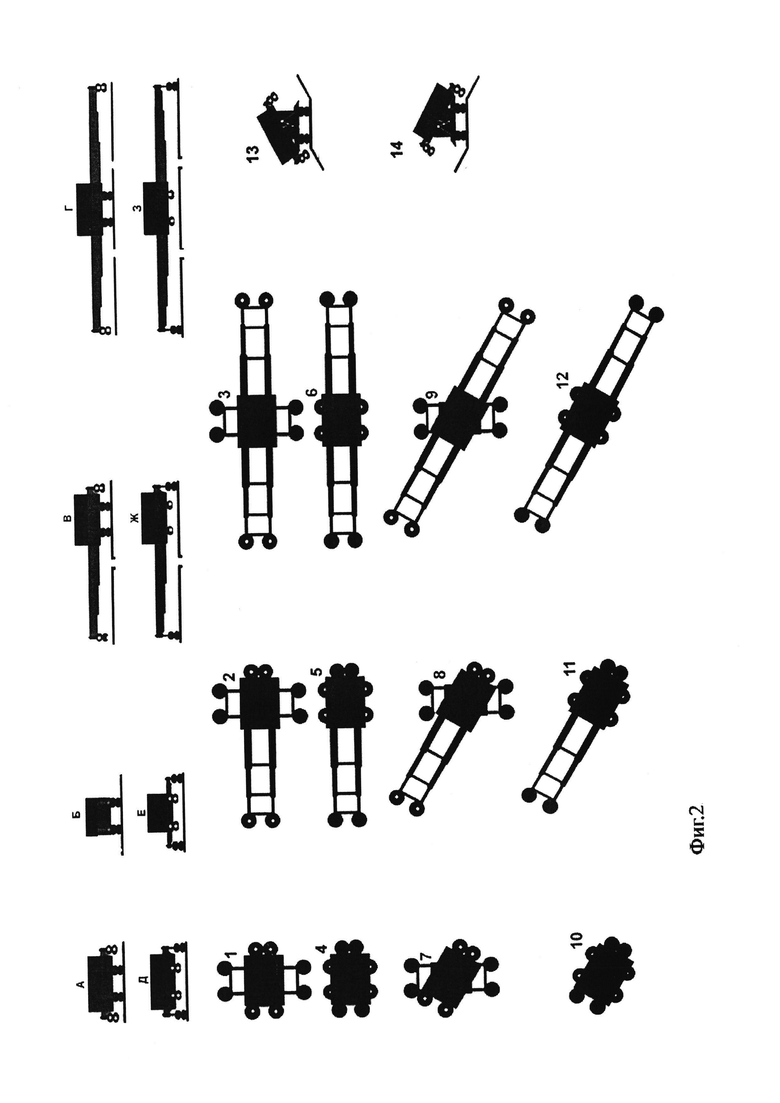
Описание функционирования Универсальной самоходной платформы по
Фиг. 2. Схема фасадов и планов, в различных фазах преодоления препятствий.
А - Вид по продольной оси Универсальной самоходной платформы, с поднятыми и собранными передними и задними группами телескопических опор Блоков 4 и 5. Боковая группа телескопических опор Блока 6 находится в рабочем состоянии, воспринимая всю нагрузку от Универсальной самоходной платформы.
Б - Является видом А в поперечной проекции Универсальной самоходной платформы.
В - Вид по продольной оси Универсальной самоходной платформы, с поднятой задней и передней группой телескопических опор Блоков 4 и 5. Задняя группа находится в развернутом виде. Боковая группа телескопических опор Блока 6 находится в рабочем состоянии, воспринимая всю нагрузку от Универсальной самоходной платформы.
Г - Вид по продольной оси Универсальной самоходной платформы, с поднятыми и развернутыми задними и передними группами телескопических опор Блоков 4 и 5. Боковая группа телескопических опор Блока 6 находится в рабочем состоянии, воспринимая всю нагрузку от Универсальной самоходной платформы.
Д - Вид по продольной оси Универсальной самоходной платформы, с поднятой боковой группой телескопических опорных консолей Блока 6. Передняя и задняя группа телескопических опор Блоков 4 и 5, находясь в собранном состоянии, воспринимают всю нагрузку от Универсальной самоходной платформы.
Е - Является видом Д, в поперечной проекции Универсальной самоходной платформы.
Ж - Вид по продольной оси Универсальной самоходной платформы с нагрузкой на передние и задние группы телескопических опорных консолей Блоков 4 и 5. Задняя группа телескопических опорных консолей Блока 5 находится в развернутом состоянии. Телескопические опорные консоли боковой группы Блока 6 находятся в свернутом состоянии без нагрузки.
З - Вид по продольной оси Универсальной самоходной платформы с нагрузкой на развернутые передние и задние группы телескопических опорных консолей Блоков 4 и 5. Телескопические опорные консоли боковой группы Блока 6 находятся в свернутом состоянии без нагрузки.
1 - Проекция - вида сверху, фасадов позиции 1 и 2.
2 - Проекция - вида сверху, фасада позиции В
3 - Проекция - вида сверху, фасада позиции Г
4 - Проекция - вида сверху, фасадов позиции Д и Е
5 - Проекция - вида сверху, фасада позиции Ж
6 - Проекция - вида сверху, фасада позиции З
Позиции 7, 8, 9, 10 11, 12 показывают схему изменения направления движения Универсальной самоходной платформы.
Основной принцип изменения направления движения Универсальной самоходной платформы заключается:
а) в повороте несущей платформы вместе с передней и задней группой телескопических опорных консолей Блоков 4, 5 на необходимый угол, в момент передачи всей нагрузки от Универсальной самоходной платформы на пневмоподпятники-домкраты с анкерами-зацепами боковой группы телескопических опор Блока 6.
б) После фиксации определенного угла, нагрузка от Универсальной самоходной платформы передается на переднюю и заднюю группу телескопических опорных консолей Блоков 4 и 5.
в) Нижний опорно-поворотный блок, совместно с боковой группой телескопических опорных консолей Блока 6 меняют свое прежнее местоположение, сливаясь с основной группой Универсальной самоходной платформы в измененном положении.
Максимальный угол поворота, без потери устойчивости - 60 градусов.
Основные преимущества Универсальной самоходной платформы, как большегрузной транспортной системы, заключается в:
1. Экологичности В связи с отсутствием крутящего момента ходовой части при контакте с землей во время движения Универсальной самоходной платформы, соответственно нет срыва травяного покрова и образования глубокой колеи. Этому способствует и наличие мягкой, надувной опорной конструкции -опорных пневмоподпятниками-домкратами с анкерами-зацепами.
Данное решение превращает Универсальную самоходную платформу в Единственный (кроме воздушного) вид большегрузного транспорта, не нарушающего очень тонкий и хрупкий покров Арктической тундры.
2. Повышенная проходимость.
Универсальная самоходная платформа в груженом состоянии способна передвигаться в любых природно-климатических условиях по пересеченной местности с любыми типами грунтов (лед, снег, песок, галька). Универсальная самоходная платформа, благодаря наличию мягких пневмоподпятниками-домкратами с углепластиковыми анкерами-зацепами и повышенными свойствами сцепления пневмо-подушек, способна взбираться на крутые склоны (до 30 градусов), со скользкими и сыпучими поверхностями.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПРОХОДЧЕСКИЙ АГРЕГАТ | 1998 |
|
RU2144138C1 |
| ШАГАЮЩИЙ ХОД И САМОХОДНАЯ МАШИНА НА ЕГО ОСНОВЕ | 2011 |
|
RU2452647C1 |
| ПРОХОДЧЕСКИЙ АГРЕГАТ | 1992 |
|
RU2026982C1 |
| ПРОХОДЧЕСКО-ОЧИСТНОЙ МЕХАНИЗИРОВАННЫЙ КОМПЛЕКС (БЛОК) | 1998 |
|
RU2172410C2 |
| КРАН СТРЕЛОВОЙ САМОХОДНЫЙ | 2015 |
|
RU2599741C2 |
| РОТОРНЫЙ ДВИГАТЕЛЬ ВНЕШНЕГО И ВНУТРЕННЕГО СГОРАНИЯ | 2000 |
|
RU2202701C2 |
| ПОСЕВНОЙ КОМБАЙН | 2010 |
|
RU2430498C1 |
| Шаговый подъемник | 1990 |
|
SU1776631A1 |
| СПОСОБ ПЕРЕМЕЩЕНИЯ САМОХОДНОГО ТРАНСПОРТНОГО СРЕДСТВА, ОБЕСПЕЧИВАЮЩИЙ ЕМУ ВЫСОКУЮ ПРОХОДИМОСТЬ, ПОВЫШЕННУЮ УСТОЙЧИВОСТЬ НА ВОДЕ, И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2017 |
|
RU2668935C1 |
| ТРАНСПОРТНОЕ СРЕДСТВО ДЛЯ ИНВАЛИДОВ | 2015 |
|
RU2606218C1 |
Изобретение относится к шагающим транспортным средствам с повышенной грузоподъемностью и проходимостью. Универсальная самоходная платформа содержит телескопические опорные консоли, пневмоподпятники-домкраты с анкерами-зацепами, многослойную пространственную конструкцию несущей платформы с опорно-поворотным устройством, в котором находится балансировочный элемент, меняющий угол наклона платформы за счет смещения ее центра тяжести, 3 группы спаренных 4-секционных телескопических опорных консолей с пневмоподпятниками-домкратами и анкерами-зацепами, обеспечивающими шагающее движение. Движение происходит за счет перераспределения функций работы передней и задних спаренных консольных телескопических балок-ног блоков продольной оси и боковой группы блока продольной оси. Достигается повышение работоспособности грузовой платформы. 7 з.п. ф-лы, 2 ил.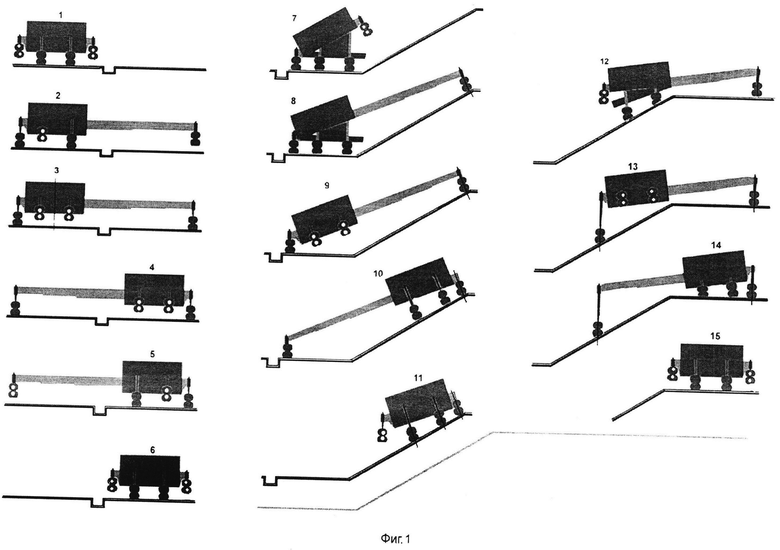
1. Универсальная самоходная платформа, представляющая собой шагающее транспортное средство повышенной проходимости, в котором использованы балки-ноги, отличающаяся тем, что содержит телескопические опорные консоли, являющиеся движителями-ногами, обеспечивающие пошаговое движение по пересеченной местности с любым типом грунтового покрытия, пневмоподпятники-домкраты с анкерами-зацепами, обеспечивающими движение без нарушения растительного покрова и подъем платформы на склоны до 30 градусов по скользкому и сыпучему покрытию, многослойную пространственную конструкцию несущей платформы с опорно-поворотным устройством, в котором находится балансировочный элемент, меняющий угол наклона платформы за счет смещения ее центра тяжести, включает 3 группы спаренных 4-секционных телескопических опорных консолей с пневмоподпятниками-домкратами и анкерами-зацепами, обеспечивающими шагающее движение, движение происходит за счет перераспределения функций работы передней и задних спаренных консольных телескопических балок-ног блоков продольной оси и боковой группы блока продольной оси, при этом передняя пара телескопических опорных консолей блока продольной оси выполняет функцию лебедки с зацепом за пневмоподпятниками-домкратами с анкерами-зацепами, задняя пара телескопических опорных консолей блока продольной оси выполняет функцию толкача с отталкиванием от пневмоподпятников-домкратов с анкерами-зацепами, две боковые пары телескопические опорных консолей блока поперечной оси выполняют функцию домкратов всей платформы, обеспечивающих смену местоположения консольных спаренных телескопических опорных консолей продольной оси.
2. Универсальная самоходная платформа по п.1, отличающаяся тем, что телескопические опорные консоли имеют наиболее оптимальное сечение овального профиля с плоской верхней частью с использованием высокопрочной мелкозернистой конструкционной стали, они оснащены системой с одним гидроцилиндром и механизмом внутренней фиксации секций под контролем автоматической системы управления выдвижения и втягивания, при этом одна из секций жестко закреплена к конструкции платформы, являясь удерживающим элементом для 3-х мобильных секций опорной консоли, блоки для тросов с целью снижения веса изготавливаются из полиамида.
3. Универсальная самоходная платформа по п.1, отличающаяся тем, что 3-секционные пневмоподпятники-домкраты с анкерами-зацепами включены в непосредственную работу движительной системы в части обеспечения передвижения универсальной самоходной платформы без крутящих моментов на грунт без колеи.
4. Универсальная самоходная платформа по п.1, отличающаяся тем, что в многослойный пространственный конструктивный комплекс универсальной самоходной платформы входит поворотная платформа с опорно-поворотным устройством, в котором находится балансировочный элемент, при незначительном смещении которого появляется естественный противовес, обеспечивающий изменение угла наклона тяжеловесной платформы с телескопическими консолями, что значительно увеличивает скорость движения.
5. Универсальная самоходная платформа по п.1, отличающаяся тем, что включает кабину с системой управления перемещением платформы и погрузочно-разгрузочными работами, которая размещается в кормовой части платформы.
6. Универсальная самоходная платформа по п.1, отличающаяся тем, что в отдельном блоке за кабиной расположена силовая установка и трансмиссия.
7. Универсальная самоходная платформа по п.1, отличающаяся тем, что топливные баки универсальной самоходной платформы крепятся к консолям за контуром платформы.
8. Универсальная самоходная платформа по п.1, отличающаяся тем, что на верхней платформе универсальной самоходной платформы размещается погрузочно-разгрузочный блок, включающий кран и лебедку.
| УСТРОЙСТВО ДЛЯ ПРЕОДОЛЕНИЯ ПРЕПЯТСТВИЙ | 2014 |
|
RU2554270C1 |
| 0 |
|
SU172946A1 | |
| ШАГАЮЩЕЕ ТРАНСПОРТНОЕ СРЕДСТВО | 2012 |
|
RU2495780C1 |
| RU 2000242 C1, 07.09.1993 | |||
| НОГА ШАГАЮЩЕГО АППАРАТА | 2014 |
|
RU2594316C2 |

