ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
[0001] Настоящее изобретение относится к транспортным средствам и способам парковки транспортных средств.
УРОВЕНЬ ТЕХНИКИ
[0002] Транспортное средство может включать в себя автоматизированную систему парковки, которая выполнена с возможностью парковки транспортного средства независимо от управляющего воздействия водителя посредством элементов ручного управления (например, рулевого колеса, педали газа, педали тормоза и т.д.).
РАСКРЫТИЕ ИЗОБРЕТЕНИЯ
[0003] Предложен способ парковки транспортного средства. Способ включает в себя этапы, на которых обнаруживают целевой объект на парковочном месте с помощью камеры и перемещают транспортное средство на парковочное место на основании угла между целевым объектом и перпендикуляром к полю обзора камеры и расстояния от камеры до целевого объекта. Расстояние от камеры до целевого объекта основано на векторе, представляющем границу целевого объекта.
[0004] Предложено транспортное средство. Транспортное средство включает в себя камеру, выполненную с возможностью обнаружения целевого объекта на парковочном месте, и контроллер, запрограммированный с возможностью перемещения транспортного средства на парковочное место на основании угла рыскания транспортного средства и расстояния до целевого объекта в ответ на обнаружение камерой наличия целевого объекта. Расстояние до целевого объекта основано на векторе, представляющем границу целевого объекта.
[0005] Предложено транспортное средство. Транспортное средство включает в себя камеру, выполненную с возможностью вывода сигнала, указывающего наличие целевого объекта на парковочном месте, и контроллер, который находится в сообщении с камерой. Контроллер запрограммирован с возможностью перемещения транспортного средства на парковочное место на основании угла между целевым объектом и перпендикуляром к полю обзора камеры и расстояния от камеры до целевого объекта в ответ на прием сигнала от камеры, указывающего наличие целевого объекта. Расстояние от камеры до целевого объекта основано на векторе, представляющем границу целевого объекта, угле между вектором, представляющим границу целевого объекта, и горизонтальной проекцией первого сегмента границы целевого объекта, и положении целевого объекта в поле обзора камеры.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
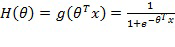
[0006] Фиг. 1 представляет собой принципиальную схему, иллюстрирующую вид сверху транспортного средства относительно парковочного места;
[0007] Фиг. 2 иллюстрирует поле обзора камеры, которая прикреплена к транспортному средству, и целевой объект, обнаруженный в поле обзора камеры;
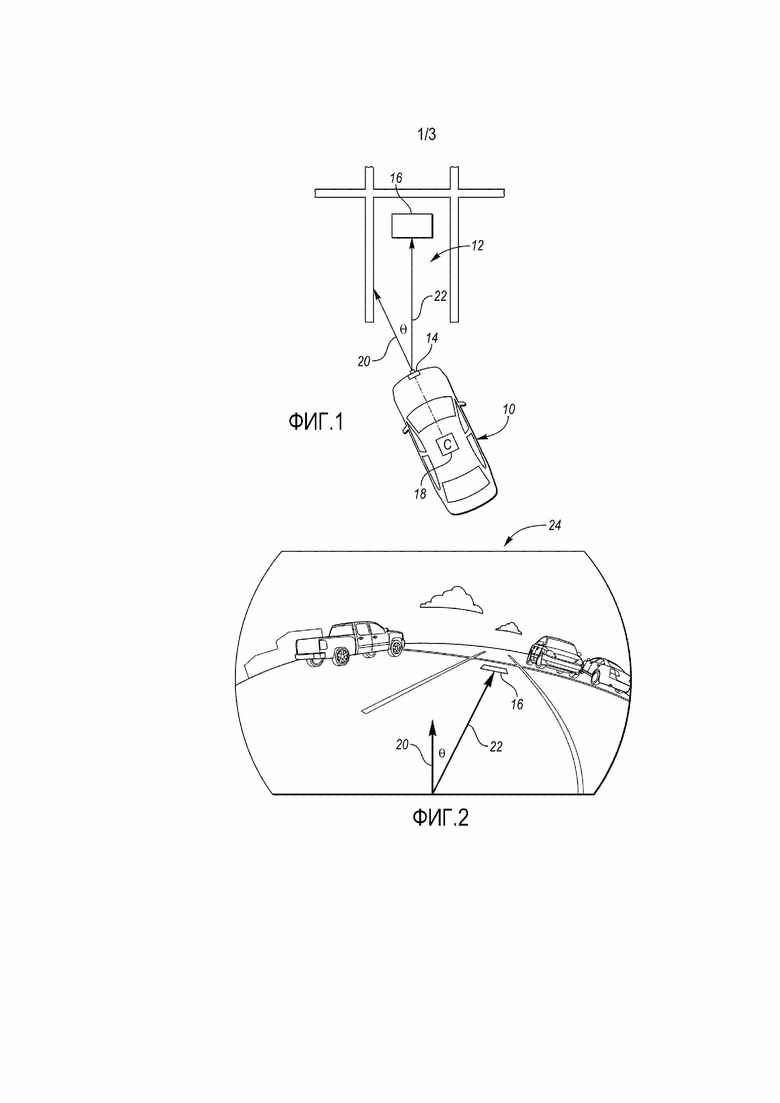
[0008] Фиг. 3 иллюстрирует вид целевого объекта в увеличенном масштабе в поле обзора камеры относительно обнаруживаемого камерой центроида целевого объекта и предполагаемого центроида целевого объекта;
[0009] Фиг. 4 иллюстрирует вид целевого объекта в увеличенном масштабе в поле обзора камеры относительно вектора, представляющего фактическую границу целевого объекта, и вектора, представляющего спроецированную границу целевого объекта вдоль оси х;
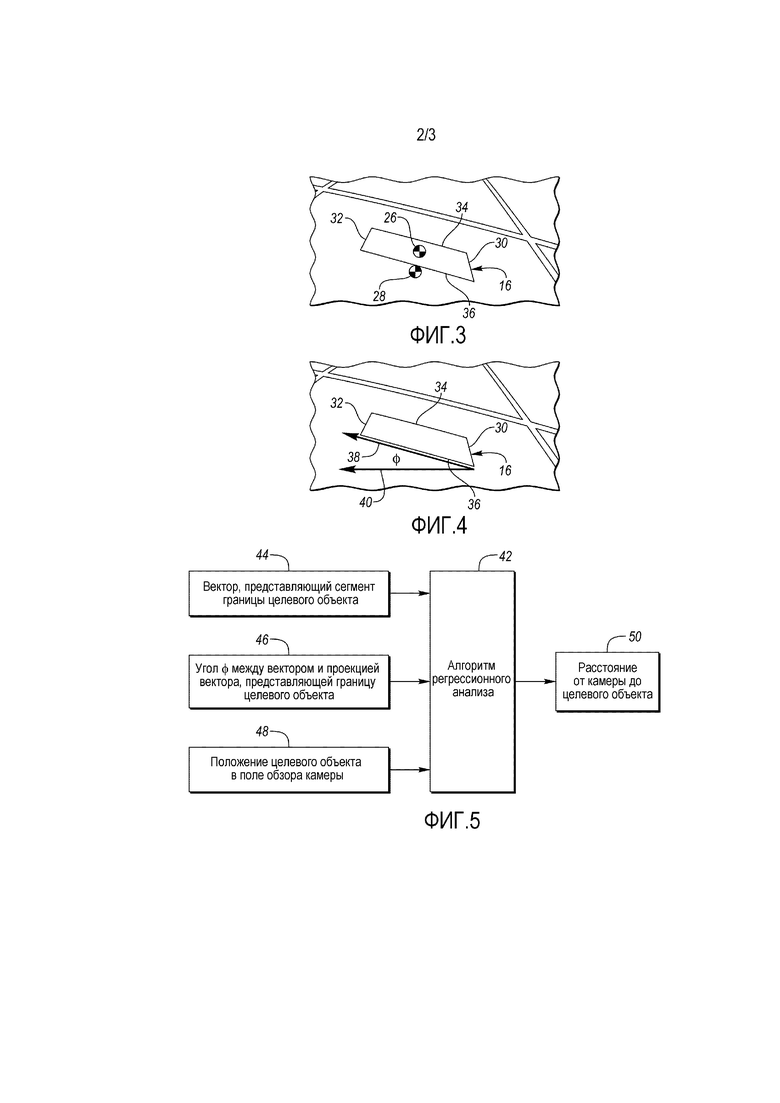
[0010] Фиг. 5 иллюстрирует способ использования регрессионного анализа для определения расстояния от камеры до целевого объекта; и
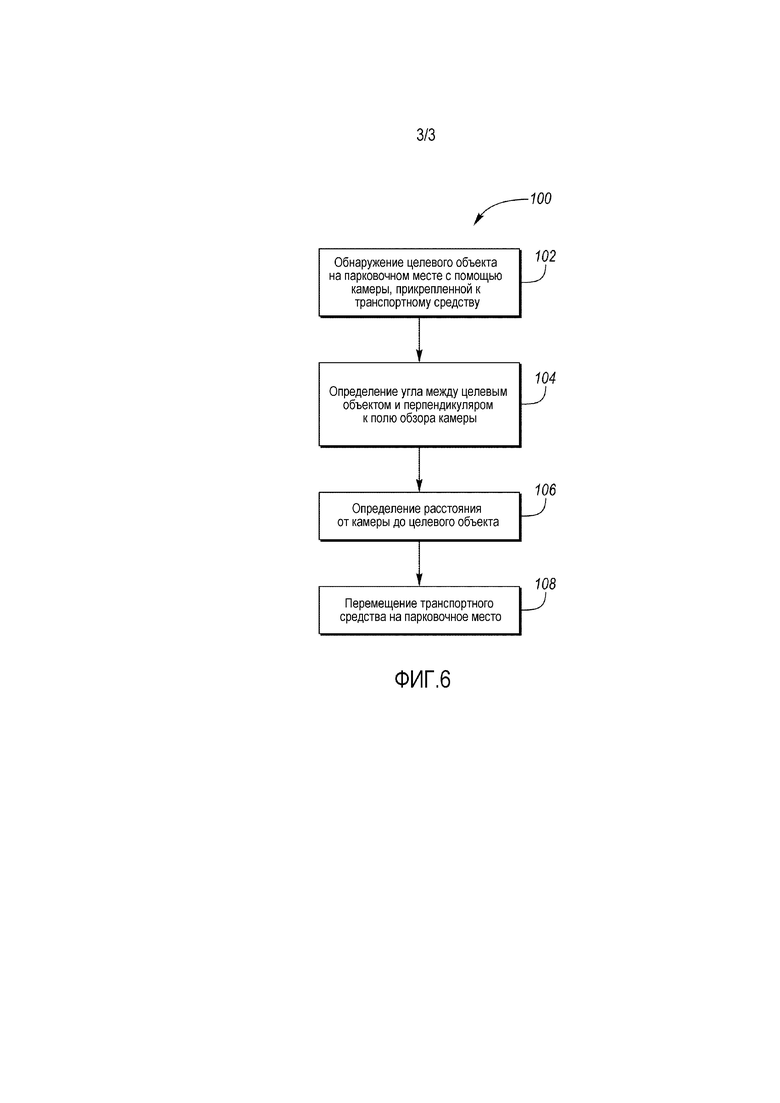
[0011] Фиг. 6 иллюстрирует способ парковки транспортного средства при обнаружении целевого объекта на парковочном месте.
ОСУЩЕСТВЛЕНИЕ ИЗОБРЕТЕНИЯ
[0012] В материалах настоящей заявки раскрыты варианты осуществления изобретения. Однако следует понимать, что раскрытые варианты осуществления изобретения являются лишь примерами, и другие варианты осуществления изобретения могут принимать различные и альтернативные формы. Чертежи не обязательно выполнены в масштабе; некоторые признаки могут быть преувеличены или преуменьшены, чтобы показать детали отдельных компонентов. В связи с этим, конкретные конструктивные и функциональные детали, раскрытые в материалах настоящей заявки, не следует интерпретировать как ограничивающие, но лишь как представляющие основу для информирования специалиста в данной области техники о различных применениях настоящего изобретения. Для специалиста в данной области техники будет понятно, что различные признаки, проиллюстрированные и описанные со ссылкой на любой из чертежей, могут быть объединены с признаками, проиллюстрированными на одном или более других чертежах, для получения вариантов осуществления изобретения, которые явно не проиллюстрированы или не раскрыты. Совокупности проиллюстрированных признаков обеспечивают характерные варианты осуществления изобретения для типичных применений. Однако различные совокупности и преобразования признаков, соответствующие замыслам настоящего изобретения, могут потребоваться для отдельных применений или осуществлений.
[0013] Со ссылкой на фиг. 1 проиллюстрирован вид сверху транспортного средства 10 относительно парковочного места 12. Транспортное средство 10 может включать в себя камеру 14, которая выполнена с возможностью обнаружения целевого объекта 16, расположенного на парковочном месте 12. Камера 14 также может быть выполнена с возможностью создания выходного сигнала, указывающего наличие целевого объекта 16 и информацию, относящуюся к наличию целевого объекта 16. Камера 14 может быть любого типа камеры, но предпочтительно представляет собой цифровую камеру. Хотя камера 14 показана обращенной от переднего конца транспортного средства 10, она может быть повторно размещена обращенной от заднего конца транспортного средства 10. Камера 14 может находиться в сообщении с контроллером 18, который запрограммирован с возможностью перемещения транспортного средства 10 на парковочное место 12 на основании угла θ рыскания (который представляет собой угол между целевым объектом 16 и перпендикуляром к полю обзора камеры) и расстояния от камеры 14 до целевого объекта 16 в ответ на прием сигнала от камеры 14, указывающего наличие целевого объекта. Перпендикуляр к полю обзора камеры может быть представлен первым вектором 20, а расстояние от камеры 14 до целевого объекта 16 может быть представлено вторым вектором 22.
[0014] Хотя проиллюстрирован один контроллер, контроллер 18 может быть частью более крупной системы управления, и может управляться различными другими контроллерами во всем транспортном средстве 10, такими как контроллер систем транспортного средства (VSC). В связи с этим должно быть понятно, что контроллер 18 и один или более других контроллеров могут совместно называться «контроллером», который управляет различными функциями транспортного средства 10 и/или приводами в ответ на сигналы от различных датчиков. Контроллер 18 может включать в себя микропроцессор или центральный блок обработки (CPU) в сообщении с различными типами машиночитаемых устройств хранения или носителей. Машиночитаемые устройства хранения или носители могут включать в себя энергозависимое и энергонезависимое хранение в постоянном запоминающем устройстве (ROM), например запоминающем устройстве с произвольной выборкой (RAM) и энергонезависимой памяти (KAM). KAM представляет собой энергостойкую или энергонезависимую память, которая может использоваться для хранения различных рабочих переменных при отключении CPU. Машиночитаемые устройства хранения или носители могут быть выполнены с использованием любых из множества известных запоминающих устройств, таких как PROMs (программируемое постоянное запоминающее устройство), EPROMs (стираемое PROM), EEPROMs (электрически стираемое PROM), флэш-память или любое другое электрическое, магнитное, оптическое или совокупность запоминающих устройств с возможностью хранения данных, некоторые из которых представляют собой выполняемые инструкции, используемые контроллером в управлении транспортным средством.
[0015] Далее со ссылкой на фиг. 2-5 последовательность этапов используется для экстраполяции угла θ рыскания и расстояния от камеры 14 до целевого объекта 16. Этапы могут выполняться программой, сохраненной в контроллере 18, которая включает в себя алгоритм или последовательность алгоритмов, которые используются для получения угла θ рыскания и расстояния от камеры 14 до целевого объекта 16 на основании информации, получаемой из наблюдения целевого объекта 16 в поле обзора камеры.
[0016] Со ссылкой на фиг. 2 проиллюстрировано поле обзора камеры 24. Камера 14 сначала обнаруживает целевой объект 16. Это может выполняться с использованием программного обеспечения распознавания объектов, которое выполнено с возможностью распознавания конкретных объектов. Также с использованием программного обеспечения обнаружения объектов, которое может быть сохранено в библиотеке в контроллере 18, или другого соответствующего аппаратного обеспечения, которое включает в себя хранение данных. Далее создаются первый вектор 20, представляющий перпендикуляр к полю обзора камеры 24, и второй вектор 22, представляющий расстояние от камеры 14 до целевого объекта 16 на основании местоположения целевого объекта 16 в поле обзора камеры 24. На этом этапе, однако, создаются только направления первого вектора 20 и второго вектора 22 (не значения). Наблюдаемый угол между первым вектором 20 и вторым вектором 22 соответствует углу θ рыскания.
[0017] Со ссылкой на фиг. 3 проиллюстрирован вид целевого объекта 16 в увеличенном масштабе в поле обзора камеры 24. Создаются обнаруживаемый центроид 26 и предполагаемый центроид 28 целевого объекта 16. Предполагаемый центроид 28 может быть создан относительно сегмента границы целевого объекта 16 на основании предполагаемой формы целевого объекта 16. Обнаруживаемый центроид 26 может быть создан на основании центра сегментов, образующих границу целевого объекта 16.
[0018] В проиллюстрированном примере граница целевого объекта 16 включает в себя четыре сегмента: правая сторона 30, левая сторона 32, верхняя сторона 34 и нижняя сторона 36. Также в проиллюстрированном примере предполагаемая форма целевого объекта 16 представляет собой прямоугольник. Предполагаемый центроид 28 создается на основании обнаружения правой стороны 30 границы целевого объекта 16 и предполагаемой прямоугольной формы целевого объекта 16. Обнаруживаемый центроид 26 создается на основании центра правой стороны 30, левой стороны 32, верхней стороны 34 и нижней стороны 36 границы целевого объекта 16. Разница в положении между предполагаемым центроидом 28 и обнаруживаемым центроидом 26 определяет искажение целевого объекта 16 в поле обзора камеры 24 (искажение целевого объекта 16 также может называться искривлением). Обнаруживаемый центроид 26 и предполагаемый центроид 28 могут быть созданы с использованием программного обеспечения, которое обнаруживает и соотносит геометрические рисунки, формы, конфигурации и т.д.
[0019] Хотя целевой объект 16 представляет собой прямоугольник, и правая сторона 30 границы целевого объекта 16 используется для создания предполагаемого центроида 28 в проиллюстрированном примере, следует отметить, что целевой объект 16 может состоять из других форм, а предполагаемый центроид 28 может быть создан относительно любого из сегментов, содержащих границу целевого объекта 16.
[0020] Пример способа, который может использоваться для количественного определения искажения (искривления), может включать в себя обнаружение краев, фильтрацию/пороговую обработку, использование преобразования Хафа (которое также может называться трансформацией Хафа) для вычисления угла от перпендикуляра к линии на плоскости до горизонтальной оси плоскости (далее плоскость будет называться плоскостью XY, а горизонтальная ось будет называться осью х), и сравнения угла от перпендикуляра к линии на плоскости XY до оси х (который был вычислен с использованием преобразования Хафа) с предполагаемым углом от перпендикуляра к сегменту целевого объекта 16 до горизонтали поля обзора камеры 24.
[0021] Края целевого объекта 16 могут быть обнаружены с использованием программного обеспечения для обнаружения краев. Программное обеспечение для обнаружения краев используется для создания градиента путем сравнения значений соседних пикселей в поле обзора камеры 24 полутонового или монохромного изображения. После выполнения сравнения соседних пикселей в поле обзора камеры 24 создается результирующее изображение, указывающее набор различий, которые иллюстрируют обнаруженные края с помощью высококонтрастных краев, представленных в виде больших различий.
[0022] Алгоритм обнаружения краев может быть основан на следующих далее уравнениях (1)-(3):
 (1)
(1)
 (2)
(2)
 (3)
(3)
A представляет собой матрицу, имеющую j строк и k столбцов, которая представляет полутоновое или монохромное изображение.
В представляет собой матрицу, представляющую результирующий градиент из сравнения значений соседних пикселей в полутоновом или монохромном изображении.
[0023] Программное обеспечение для обнаружения краев также может включать в себя фильтрацию/пороговую обработку. Например, порог может устанавливаться так, что только наиболее выраженные изменения результирующего градиента, представленные матрицей B, будут показаны на результирующем изображении, которое представляет края, обнаруженные на полутоновом или монохромном изображении. Дополнительно матрица A может быть предварительно обработана, чтобы показать определенный цветовой канал или исследуемую область в поле обзора камеры.
[0024] Один край, который был обнаружен с использованием программного обеспечения для обнаружения краев, образует последовательность точек вдоль линии на плоскости XY в поле обзора камеры 24. Преобразование Хафа может выполняться на последовательности точек (или пикселей), образованных обнаруженным краем. Преобразование Хафа включает создание последовательности линий через каждую точку (или группу выбранных точек), образованных одним обнаруженным краем. Каждая линия из последовательности линий, проведенных через каждую точку, образованную обнаруженным краем, связана с плоскостью XY перпендикулярной линией. Далее создаются угол между перпендикулярной линией и осью х и длина перпендикулярной линии от начала системы координат до точки, в которой перпендикулярная линия пересекает один исследуемый край. Каждая точка обнаруженного края далее может быть представлена в пространстве Хафа в виде синусоидальной кривой, построенной как угол в зависимости от расстояния перпендикулярной линии от начала системы координат до одного исследуемого края. Когда синусоидальные кривые построены, линия, которая проходит через все точки, образованные обнаруженным краем на плоскости XY в поле обзора камеры 24, представлена точкой в пространстве Хафа, в которой пересекаются синусоидальные кривые. Точка в пространстве, в которой пересекаются синусоидальные кривые, задает координаты (длина от начала системы координат до обнаруженного края, который образует последовательность точек, и угол от оси х) линии, которая является перпендикулярной обнаруженному краю, который образует последовательность точек. Искривление далее может определяться разницей угла в точке в пространстве Хафа, в которой пересекаются синусоидальный кривые, и предполагаемого угла от перпендикуляра к сегменту целевого объекта 16 до горизонтали поля обзора камеры 24. Примеры преобразования Хафа показаны в патенте США № 3,069,654 Hough, и в “Use of the Hough Transformation to Detect Lines and Curves in Pictures”, Duda R. O. и P. E. Hart, Communications of the ACM, Vol. 15 №. 1, стр. 11-15 (январь 1972 г.), содержание каждого из которых настоящим включено в материалы настоящей заявки путем ссылки в полном объеме.
[0025] Следует отметить, что другие способы, отличные от преобразования Хафа, могут использоваться для обнаружения искривления (искажения) целевого объекта 16, включая, но не ограничиваясь, способ Фурье, способ профиля проекций, способ кластеризации ближайших соседей и способ корреляции.
[0026] При определении искривления целевого объекта 16 процесс также может учитывать внутренние свойства линзы, которая вызывает искажение (включающее в себя радиальное и/или тангенциальное искажение) спроецированного изображения на плоскости изображения камеры. Имеются несколько алгоритмов и уравнений, которые известны в данной области техники, которые следует истолковывать, как раскрытые в материалах настоящей заявки, которые используются для корректировки либо бочкообразного, либо подушкообразного типа искажения линзы камеры.
[0027] Обращаясь к фиг. 4, проиллюстрирован другой вид целевого объекта 16 в увеличенном масштабе в поле обзора камеры 24. После определения искривления целевого объекта 16 возможно определение направления и значения вектора 38, который представляет сегмент границы целевого объекта 16. В целях наглядности вектор 38 соответствует сегменту, представляющему нижнюю сторону 36 целевого объекта 16. Однако следует понимать, что способ может использоваться для определения направления и значения вектора, который представляет любой из сегментов, которые содержат границу целевого объекта 16, включающую в себя правую сторону 30, левую сторону 32, верхнюю сторону 34 или нижнюю сторону 36 в этом примере. Дополнительно способ может применяться к любой стороне целевого объекта, который имеет какую-либо особую форму. После обнаружения границы целевого объекта 16 с помощью способа обнаружения краев, описанного выше, возможно создание направления и значения вектора 40, который представляет собой проекцию сегмента границы целевого объекта 16 вдоль известной оси. Вектор 40, который представляет собой проекцию сегмента границы целевого объекта 16, может быть создан с использованием программного обеспечения, которое обнаруживает и соотносит геометрические рисунки, формы, конфигурации и т.д. Здесь вектор 40 соответствует горизонтальной проекции нижней стороны 36 целевого объекта 16. После создания вектора 40, представляющего горизонтальную проекцию нижней стороны 36 целевого объекта, искривление (искажение), определенное ранее, применяется к вектору 40, приводя к вектору 38, который соответствует направлению и значению сегмента границы целевого объекта 16, который соответствует нижней стороне 36 целевого объекта 16. После определения двух векторов 38, 40, угол ψ, который расположен между двумя векторами 38, 40, далее может определяться.
[0028] Со ссылкой на фиг. 5 проиллюстрирован способ использования регрессионного анализа для определения расстояния от камеры 14 до целевого объекта 16. Способ использования регрессионного анализа включает в себя ввод последовательности переменных в алгоритм 42 регрессионного анализа. Последовательность переменных может включать в себя первый ввод 44, который соответствует вектору 38, который представляет направление и значение сегмента границы целевого объекта 16, второй ввод 46, который соответствует углу, расположенному между векторами 38, 40, и третий ввод 48, который соответствует положению целевого объекта 16 в поле обзора камеры 24. Вывод 50 алгоритма 42 регрессионного анализа соответствует расстоянию от камеры 14 до целевого объекта 16. Расстояние от камеры 14 до целевого объекта соответствует значению второго вектора 22, изображенного на фиг. 1. Вместе с углом θ, который представляет собой угол между целевым объектом 16 и первым вектором 20, представляющим перпендикуляр к полю обзора камеры, направление и значение второго вектора 22 далее являются известными. Если камера 14 находится на известной высоте над поверхностью дороги, то может применяться теорема Пифагора (со вторым вектором 22, содержащим гипотенузу правого треугольника) для определения расстояния вдоль поверхности дороги (которое может соответствовать горизонтальному расстоянию) от камеры 14 до целевого объекта 16.
[0029] Алгоритм 42 регрессионного анализа может состоять из сравнения новых данных с ранее накопленными данными (которые также могут называться тренировочными данными). Тренировочные данные используются для создания карты вводов и выводов и должны быть выполнены так, что новые данные масштабируются с минимальной погрешностью по сравнению с тренировочными данными. Здесь тренировочные данные и новые данные могут соотносить местоположение пикселей в поле обзора камеры 24 с расстоянием от камеры 14. В связи с этим после определения направления и значения вектора 38, который представляет сегмент границы целевого объекта 16, возможно определение расстояния до вектора 38 (т.е. расстояния от камеры 14 до целевого объекта 16) путем сравнения местоположения пикселей вектора 38 с предыдущими изученными данными, которые представляют местоположение пикселей и расстояние.
[0030] Алгоритм 42 регрессионного анализа может состоять из гипотетической функции, которая используется для построения карты точек данных, и целевой функции, которая используется для вычисления точности гипотетической функции. Примеры алгоритма 42 регрессионного анализа могут включать в себя, но не ограничиваясь, линейные модели, полиномиальные модели, логистические модели и нейронные сети.
[0031] Линейный регрессионный анализ может быть основан на следующих уравнении (4) гипотетической функции и уравнении (5) целевой функции:
 (4)
(4)
 (5)
(5)
[0032] Полиномиальный регрессионный анализ может быть основан на следующих уравнении (6) гипотетической функции и уравнении (7) целевой функции:
 (6)
(6)
 (7)
(7)
[0033] Логистический регрессионный анализ может основываться на следующих уравнении (8) гипотетической функции и уравнении (9) целевой функции:
 (8)
(8)
 (9)
(9)
[0034] Со ссылкой на фиг. 6 проиллюстрирован способ 100 парковки транспортного средства при обнаружении целевого объекта на парковочном месте. Способ 100 включает в себя первый этап 102, на котором обнаруживают целевой объект 16 на парковочном месте 12 с помощью камеры 14, которая прикреплена к транспортному средству 10. После обнаружения целевого объекта 16 способ 100 переходит на этап 104, на котором определяют угол θ рыскания между перпендикуляром к полю обзора камеры и целевым объектом 16. Способ 100 далее переходит на этап 106, на котором определяют расстояние от камеры 14 до целевого объекта 16 на основании способа, описанного выше в отношении фиг. 2-5. Транспортное средство 10 далее может перемещаться на парковочное место 12 на этапе 108 на основании угла θ рыскания и расстояния от камеры 14 до целевого объекта 16.
[0035] Слова, используемые в описании, являются описательными, а не ограничивающими словами, и следует понимать, что различные изменения могут быть выполнены без отклонения от сущности и объема изобретения. Как описано выше, признаки различных вариантов осуществления изобретения могут быть объединены для образования дополнительных вариантов осуществления изобретения, которые могут быть не описаны или не проиллюстрированы в явном виде. Хотя различные варианты осуществления изобретения могут быть описаны как обеспечивающие преимущества или являющиеся предпочтительными относительно других вариантов осуществления изобретения или известных в уровне техники осуществлений относительно одной или более желаемых характеристик, специалистам в данной области техники понятно, что возможен компромисс в отношении одного или более признаков или характеристик для достижения требуемых атрибутов комплексной системы, которые зависят от конкретного применения и осуществления. Эти атрибуты могут включать в себя, но не ограничиваясь, стоимость, прочность, долговечность, затраты за срок службы, конкурентоспособность, внешний вид, упаковку, размер, удобство эксплуатации, вес, технологичность, простоту сборки и т.д. В связи с этим варианты осуществления изобретения, описанные как менее желательные, чем другие варианты осуществления изобретения или известные в данной области техники варианты осуществления изобретения относительно одной или более характеристик, не выходят за пределы объема изобретения и могут быть желательны для конкретных применений.
Изобретение относится к транспортным средствам и способам парковки транспортных средств. Способ парковки транспортного средства содержит этапы, на которых: обнаруживает целевой объект на парковочном месте с помощью камеры и перемещает транспортное средство на парковочное место на основании угла между целевым объектом и перпендикуляром к полю обзора камеры и расстояния от камеры до целевого объекта на основании регрессионного анализа, который включает в себя вектор, представляющий сегмент границы целевого объекта, в качестве входной переменной. Транспортное средство содержит камеру, выполненную с возможностью обнаружения целевого объекта на парковочном месте, и контроллер, запрограммированный с возможностью в ответ на обнаружение камерой наличия целевого объекта перемещения транспортного средства на парковочное место на основании угла рыскания транспортного средства и расстояния до целевого объекта, причем расстояние основано на регрессионном анализе, который включает в себя вектор, представляющий сегмент границы целевого объекта, в качестве входной переменной. Достигается автоматизированная парковка транспортного средства. 3 н. и 17 з.п. ф-лы, 6 ил.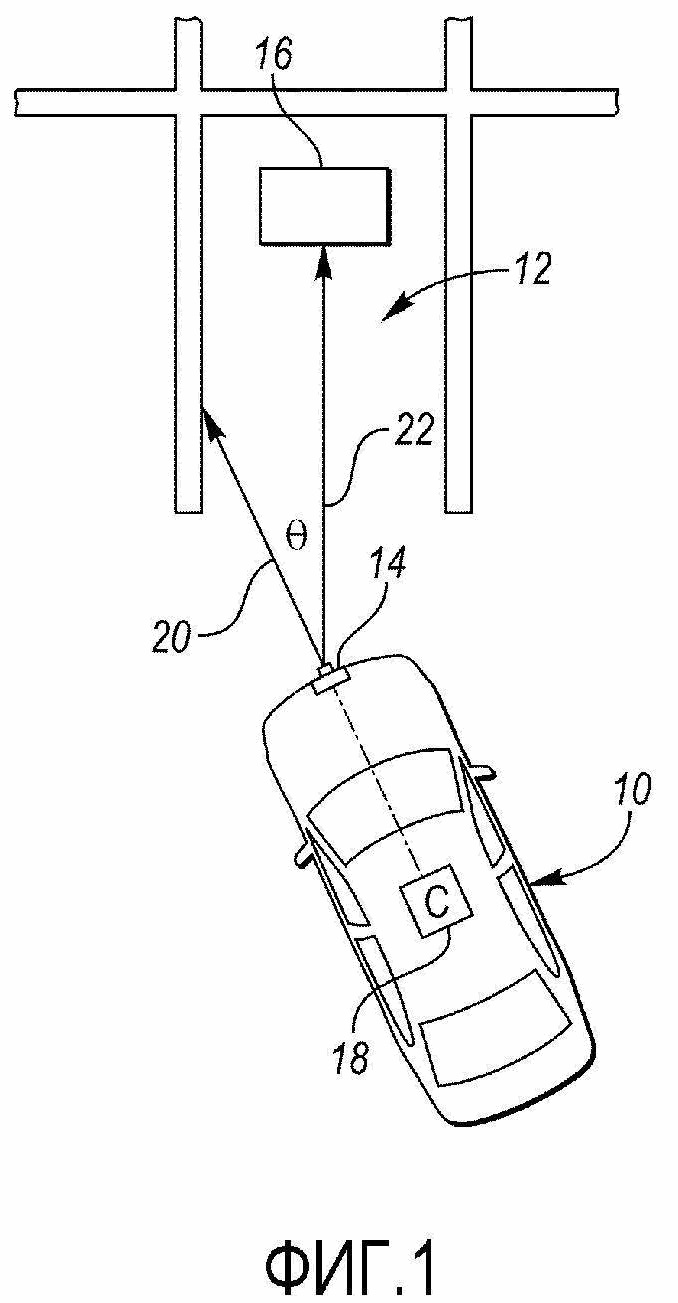
1. Способ парковки транспортного средства, содержащий этапы, на которых:
обнаруживают целевой объект на парковочном месте с помощью камеры; и
перемещают транспортное средство на парковочное место на основании
угла между целевым объектом и перпендикуляром к полю обзора камеры и
расстояния от камеры до целевого объекта на основании регрессионного анализа, который включает в себя вектор, представляющий сегмент границы целевого объекта, в качестве входной переменной.
2. Способ по п. 1, в котором вектор формируется на основании наблюдаемой горизонтальной проекции сегмента границы и искажения целевого объекта.
3. Способ по п. 2, в котором регрессионный анализ также включает в себя угол между упомянутым вектором и горизонтальной проекцией в качестве входной переменной.
4. Способ по п. 3, в котором регрессионный анализ также включает в себя положение целевого объекта в поле обзора камеры в качестве входной переменной.
5. Способ по п. 3, в котором искажение основано на различии в положении между обнаруживаемым камерой центроидом целевого объекта и предполагаемым центроидом целевого объекта.
6. Способ по п. 5, в котором предполагаемый центроид формируется на основании наблюдаемого второго сегмента границы целевого объекта.
7. Транспортное средство, содержащее:
камеру, выполненную с возможностью обнаружения целевого объекта на парковочном месте; и
контроллер, запрограммированный с возможностью в ответ на обнаружение камерой наличия целевого объекта перемещения транспортного средства на парковочное место на основании угла рыскания транспортного средства и расстояния до целевого объекта, причем расстояние основано на регрессионном анализе, который включает в себя вектор, представляющий сегмент границы целевого объекта, в качестве входной переменной.
8. Транспортное средство по п. 7, в котором упомянутый вектор формируется на основании наблюдаемой горизонтальной проекции сегмента границы и искажения целевого объекта.
9. Транспортное средство по п. 8, в котором регрессионный анализ также включает в себя угол между упомянутым вектором и горизонтальной проекцией в качестве входной переменной.
10. Транспортное средство по п. 9, в котором регрессионный анализ также включает в себя положение целевого объекта в поле обзора камеры в качестве входной переменной.
11. Транспортное средство по п. 9, в котором искажение основано на различии в положении между обнаруживаемым камерой центроидом целевого объекта и предполагаемым центроидом целевого объекта.
12. Транспортное средство по п. 11, в котором предполагаемый центроид формируется на основании наблюдаемого второго сегмента границы целевого объекта.
13. Транспортное средство, содержащее:
камеру, выполненную с возможностью вывода сигнала, указывающего наличие целевого объекта на парковочном месте; и
контроллер, находящийся в сообщении с камерой и запрограммированный с возможностью в ответ на прием сигнала перемещения транспортного средства на парковочное место на основании расстояния от камеры до целевого объекта и угла между целевым объектом и перпендикуляром к полю обзора камеры, причем расстояние основано на регрессионном анализе, который включает в себя вектор, представляющий сегмент границы целевого объекта, угол между вектором и горизонтальной проекцией сегмента границы, и положение целевого объекта в поле обзора в качестве входных переменных.
14. Транспортное средство по п. 13, в котором вектор формируется на основании горизонтальной проекции и искажения целевого объекта.
15. Транспортное средство по п. 14, в котором искажение основано на различии в положении между обнаруживаемым камерой центроидом целевого объекта и предполагаемым центроидом целевого объекта.
16. Транспортное средство по п. 15, в котором предполагаемый центроид целевого объекта формируется на основании наблюдаемого второго сегмента границы целевого объекта.
17. Способ по п. 1, в котором расстояние от камеры до целевого объекта основано на одном наблюдении местоположения целевого объекта.
18. Способ по п. 1, в котором регрессионный анализ определяет расстояние до целевого объекта на основании местоположения пикселей вектора в поле обзора камеры.
19. Транспортное средство по п. 7, в котором регрессионный анализ определяет расстояние до целевого объекта на основании местоположения пикселей вектора в поле обзора камеры.
20. Транспортное средство по п. 13, в котором регрессионный анализ определяет расстояние до целевого объекта на основании местоположения пикселей вектора в поле обзора камеры.
| US 2010066515 A1, 18.03.2010 | |||
| US 2014300504 A1, 09.10.2014 | |||
| ВУЛКАНИЗУЕМАЯ КОМПОЗИЦИЯ НА ОСНОВЕ ПОЛЯРНЫХ•КАУЧУКОВ | 0 |
|
SU252597A1 |

