Область техники, к которой относится изобретение
[0001] Настоящее изобретение относится к устройству для оценки деформации, устройству для диагностики и способу оценки деформации.
Уровень Техники
[0002] Известна традиционная система диагностики для прогнозирования срока службы компонентов и т.п. Например, патентная литература 1 раскрывает систему для диагностики степени усталостного разрушения транспортного средства, предупреждающая о том, что срок службы переднего лонжерона подходит к концу путем вычисления степени усталостного разрушения переднего лонжерона на основании деформации, обнаруженной датчиком деформации (тензометрическим датчиком).
СПИСОК ЦИТИРУЕМОЙ ЛИТЕРАТУРЫ
Патентная литература
[0003] Патентная литература 1: Публикация нерассмотренной японской патентной заявки № 2013-79920.
Сущность изобретения
Технологическая задача
[0004] Например, для того, чтобы в реальном времени оценить оставшийся срок службы компонента, который принимает напряжение в текучей среде, требуется получать деформацию компонента в реальном времени. Однако, тензометрический датчик трудно прикрепить непосредственно, например, к лопаткам индуктора в турбонасосе для космического корабля во время полета космического корабля. Аналогично этому, может быть трудно прикрепить тензометрический датчик к компоненту, который будет оцениваться во время использования компонента. Альтернативно, хотя тензометрический датчик способен прикрепляться к компоненту, подлежащему оценке, может потребоваться некоторая обработка данных. По этой причине был бы желателен способ без использования тензометрического датчика.
[0005] Настоящее изобретение описывает устройство для оценки деформации, устройство для диагностики и способ оценки деформации, способный получать деформацию без использования тензометрического датчика.
Решение Задачи
[0006] Устройство для оценки деформации согласно аспекту настоящего изобретения представляет собой устройство, которое оценивает деформацию компонента, обеспеченного в текучей среде. Устройство для оценки деформации включает в себя блок получения данных о давлении, который получает сигнал давления, включающий в себя временной ряд значений давления в заданном положении вблизи компонента, блок оценки, который на основе сигнала давления оценивает сигнал деформации, включающий в себя временной ряд значений деформации, возникающей в компоненте, и блок вывода, который выводит сигнал о деформации. Блок оценки преобразует сигнал давления в сигнал деформации при помощи фильтра оценки, определенного на основе спектральной плотности мощности давления и спектральной плотности мощности деформации, возникающей в компоненте при приложении к заданному положению давления.
Эффекты Изобретения
[0007] Согласно настоящему изобретению возможно получать деформацию без использования тензометрического датчика.
Краткое описание чертежей
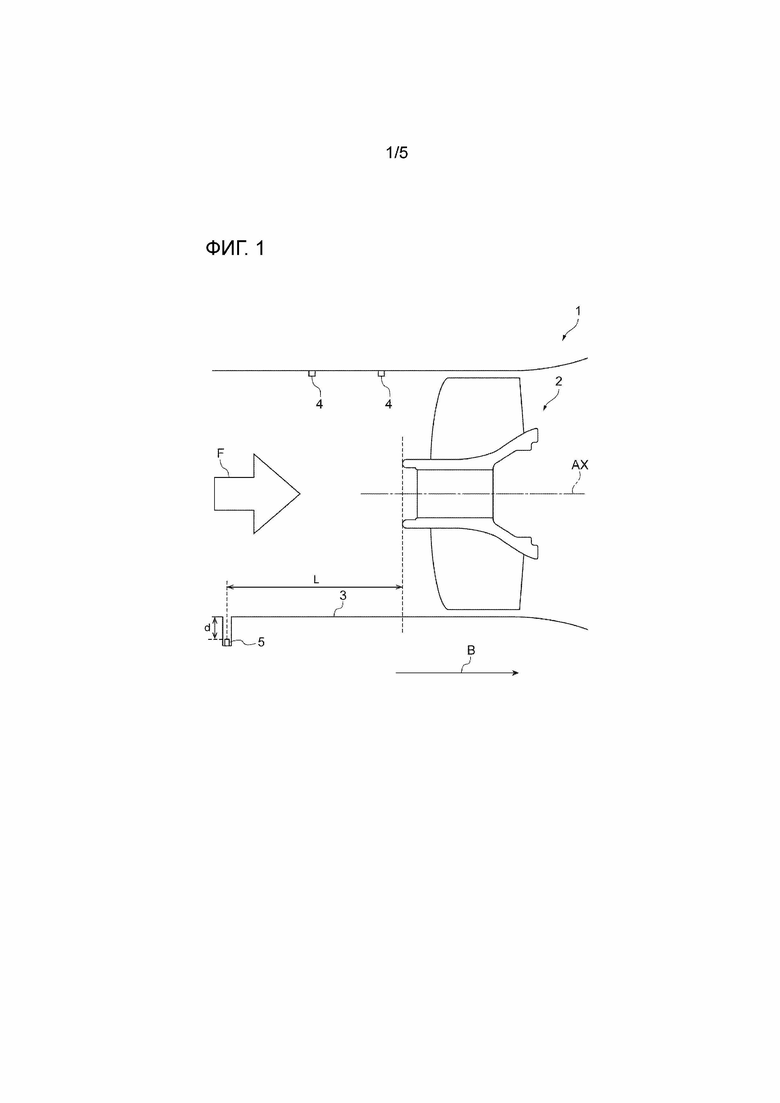
[0008] ФИГ. 1 представляет собой диаграмму, схематически показывающую пример диагностической мишени устройства для диагностики, включающего в себя устройство для оценки деформации согласно настоящему варианту выполнения.
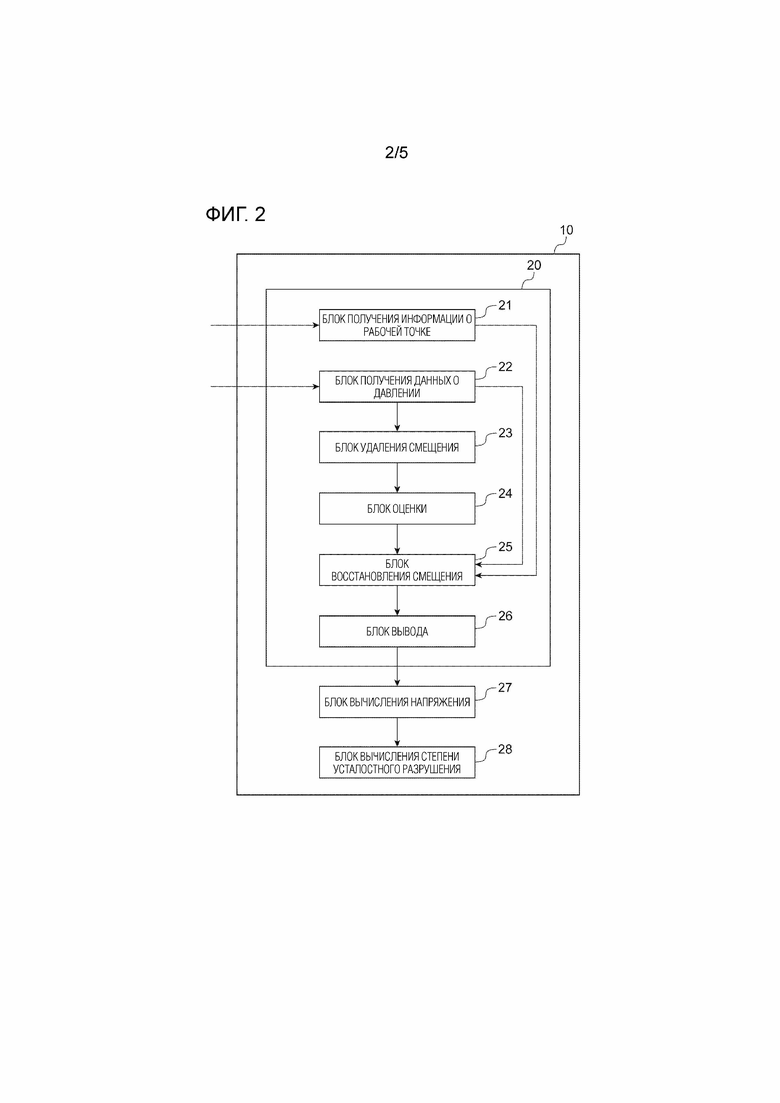
ФИГ. 2 представляет собой функциональную блок-схему устройства для диагностики, включающего в себя устройство для оценки деформации согласно настоящему варианту выполнения.
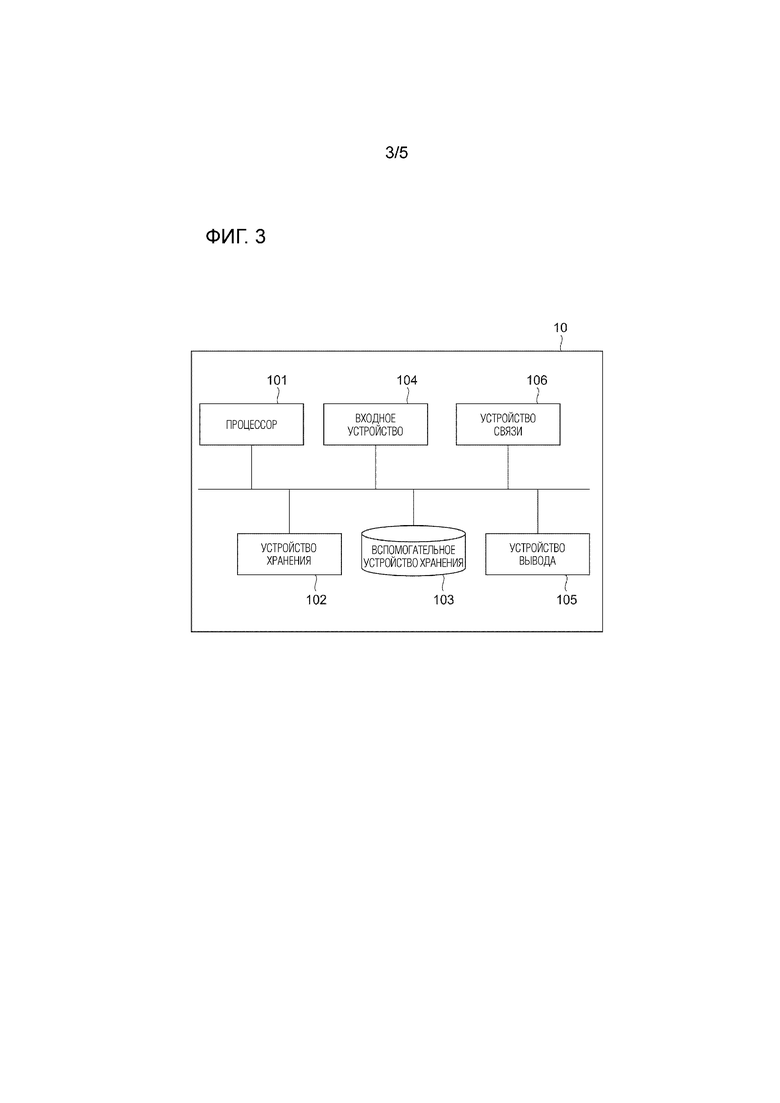
ФИГ. 3 представляет собой схему аппаратной конфигурации устройства для диагностики на ФИГ. 2.
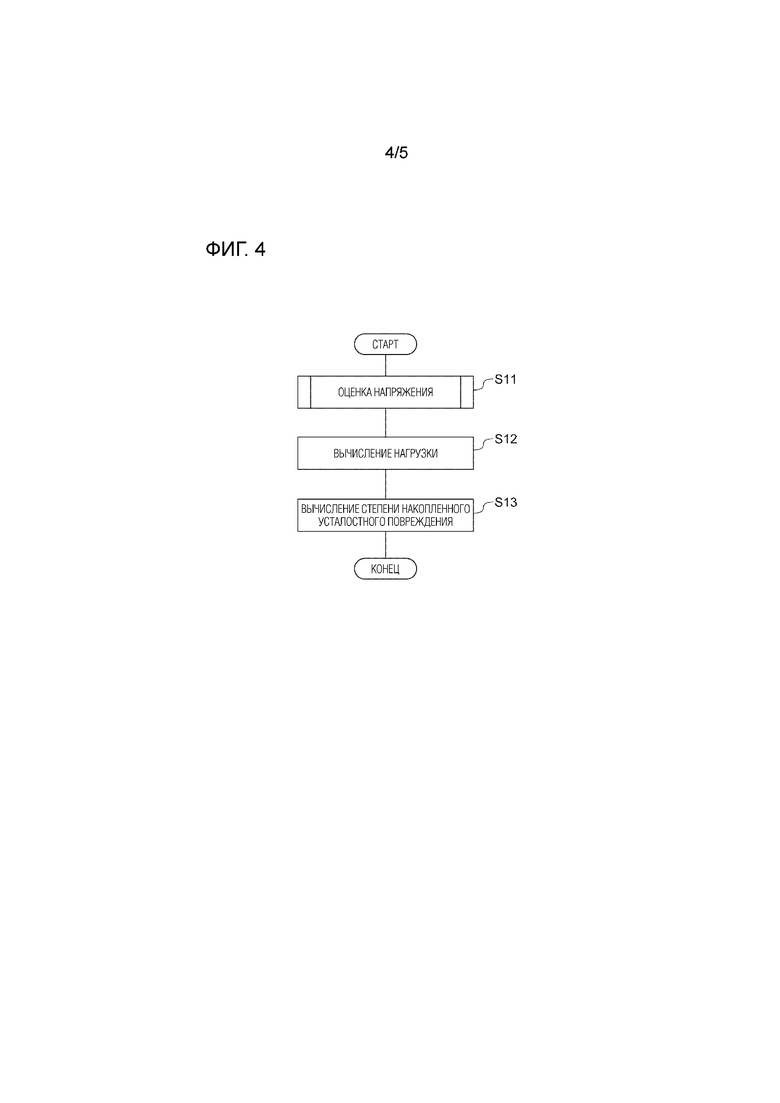
ФИГ. 4 представляет собой блок-схему, показывающую пример способа диагностики, выполняемого устройством для диагностики на ФИГ. 2.
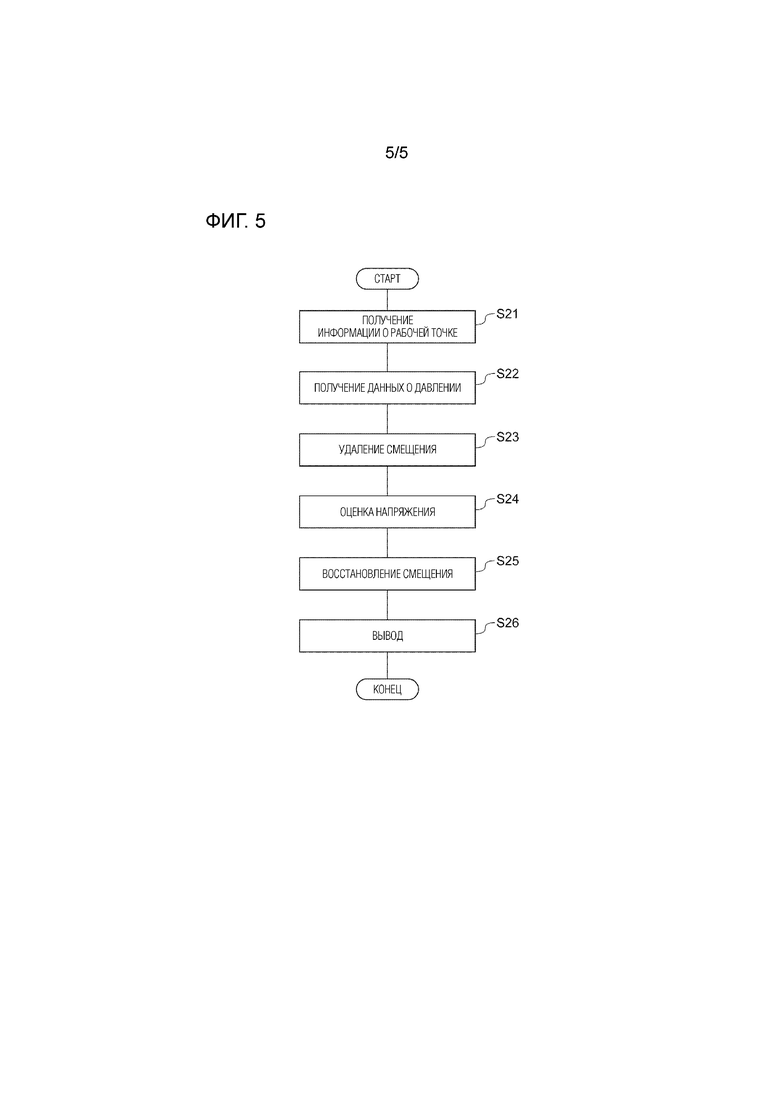
ФИГ. 5 представляет собой блок-схему, показывающую детали примера обработки данных оценки деформации на ФИГ. 4.
Описание вариантов выполнения
[0009] [1] Общие сведения о варианте выполнения
Устройство для оценки деформации согласно аспекту настоящего изобретения представляет собой устройство, которое оценивает деформацию компонента, обеспеченного в текучей среде. Устройство для оценки деформации включает в себя блок получения данных о давлении, который получает сигнал давления, включающий в себя временной ряд значений давления в заданном положении вблизи компонента, блок оценки, который оценивает на основе сигнала давления сигнал деформации, включающий в себя временной ряд значений деформации, возникающей в компоненте, и блок вывода, который выводит сигнал деформации. Блок оценки преобразует сигнал давления в сигнал деформации при помощи фильтра оценки, определенного на основе спектральной плотности мощности давления и спектральной плотности мощности деформации, возникающей в компоненте при приложении к заданному положению давления.
[0010] Способ оценки деформации согласно другому аспекту настоящего изобретения представляет собой способ, выполняемый устройством оценки деформации, который оценивает деформацию компонента, обеспеченного в текучей среде. Способ оценки деформации включает в себя этап получения данных о давлении, на котором получают сигнал давления, включающий в себя временной ряд значений давления в заданном положении вблизи компонента, этап оценки, на котором оценивают на основе сигнала давления сигнал деформации, включающий в себя временной ряд значений деформации, возникающей в компоненте, и этап вывода, на котором выводят сигнал деформации. На этапе оценки сигнал давления преобразуют в сигнал деформации при помощи фильтра оценки, определенного на основе спектральной плотности мощности давления и спектральной плотности мощности деформации, возникающей в компоненте при приложении к заданному положению давления.
[0011] В устройстве для оценки деформации и способе для оценки деформации сигнал давления, включающий в себя временной ряд значений давления в заданном положении вблизи компонента, преобразуется в сигнал деформации, включающий в себя временной ряд значений деформации, возникающей в компоненте, при помощи фильтра оценки, и выводится преобразованный сигнал деформации. Между спектральной плотностью мощности давления в заданном положении вблизи компонента и спектральной плотностью мощности деформации, возникающей в компоненте обнаружена корреляция. Таким образом, возможно преобразовывать сигнал давления в сигнал деформации при помощи фильтра оценки, определенного на основе отношения между спектральной плотностью мощности давления и спектральной плотностью мощности деформации. Так как сигнал деформации оценивается при помощи сигнала давления, то таким образом возможно получать деформацию, возникающую в компоненте без использования тензометрического датчика.
[0012] Устройство для оценки деформации может дополнительно включать в себя блок удаления смещения, который удаляет смещение от сигнала давления и блок восстановления смещения, который восстанавливает смещение сигнала деформации. Блок оценки может преобразовывать сигнал давления, из которого было удалено смещение, в сигнал деформации. Блок вывода может выводить сигнал деформации, в котором было восстановлено смещение. В этом случае, удаляя смещения из сигнала давления, возможно извлечь флуктуационный компонент сигнала давления. При помощи флуктуационного компонента сигнала давления возможно улучшить точность преобразования сигнала давления в сигнал деформации. Затем, восстанавливая смещение сигнала деформации, возможно улучшить точность оценки деформации, возникающей в компоненте.
[0013] Устройство для диагностики согласно еще одному аспекту настоящего изобретения представляет собой устройство, которое диагностирует степень накопленного усталостного разрушения компонента. Это устройство для диагностики включает в себя устройство для оценки деформации, блок вычисления напряжения, который вычисляет на основе сигнала деформации, выведенного из устройства для оценки деформации, сигнал напряжения, включающий в себя временной ряд значений напряжения, приложенного к компоненту, и блок вычисления степени накопленного усталостного разрушения, который вычисляет степень накопленного усталостного разрушения компонента на основе сигнала напряжения. В этом устройстве для диагностики сигнал напряжения, включающий в себя временной ряд значений напряжения, приложенного к компоненту, вычисляется на основе сигнала деформации, выведенного из устройства для оценки деформации, а степень накопленного усталостного разрушения компонента вычисляется на основе сигнала напряжения. В устройстве для оценки деформации, получают данные о деформации, возникающей в компоненте, и возможно получать степень накопленного усталостного разрушения компонента без использования тензометрического датчика.
[0014] [2] Пример варианта выполнения
Далее вариант выполнения настоящего изобретения подробно описан со ссылкой на сопровождающие чертежи. В описании чертежей идентичные или эквивалентные элементы обозначаются одинаковыми ссылочными позициями, а совпадающие описания опускаются.
[0015] ФИГ. 1 представляет собой диаграмму, схематически показывающую пример диагностической мишени устройства для диагностики, включающего в себя устройство для оценки деформации согласно настоящему варианту выполнения. Как показано на ФИГ. 1, индуктор 2 (компонент), обеспеченный в турбонасосе ракеты 1 является диагностической мишенью. Ракета 1 представляет собой устройство, которое получает тяговую мощность из реакции от впрыска, и представляет собой ракету многоразового пользования, которую можно использовать повторно. Ракета 1 представляет собой, например, ракету с жидкостным ракетным двигателем. В ракетном двигателе ракеты 1 в качестве топлива используют жидкое топливо F (текучая среда), такое как жидкий водород и жидкий кислород. Ракета 1 обеспечена турбонасосом для подачи жидкого топлива высокого давления F. Индуктор 2 представляет собой вращающийся корпус, обеспеченный на входной стороне турбонасоса для улучшения всасывающей характеристики турбонасоса. Индуктор 2 обеспечен в трубе 3, продолжающейся в направлении B, и вращается вокруг оси AX вращения, продолжающейся в направлении продолжения трубы 3. Индуктор 2 всасывает жидкое топливо F, протекающее через трубу 3, и повышает давление жидкого топлива F.
[0016] Поскольку индуктор 2 всасывает жидкое топливо F низкого давления, то, когда давление жидкого топлива F становится ниже давления насыщенного пара жидкого топлива F, жидкое топливо F кипит и создается много маленьких пузырьков. Затем, когда давление вокруг пузырьков становится выше давления насыщенного пара жидкого топлива F, то пузырьки исчезают. В этот момент, поскольку жидкое топливо F вокруг пузырька сталкивается вблизи центра пузырьков, создается волна давления и это создает вибрацию. Известно, что в жидком топливе F возникает кавитация и таким образом к индуктору 2 посредством кавитации прикладывается напряжение. К индуктору 2, помимо кавитации, прикладывается напряжение из-за различных факторов. Когда напряжение накапливается в индукторе 2, это может повредить индуктор 2. В частности, индукторная лопатка в индукторе 2 может быть диагностической мишенью, но в следующем далее описании описано, что диагностической мишенью является индуктор 2.
[0017] На внутренней поверхности трубы 3 обеспечен датчик 4 давления. Датчик 4 давления обеспечен вблизи индуктора 2. Положение, в котором обеспечен датчик 4 давления, устанавливается в диапазоне, в котором энергия вибрации, создаваемая в этом положении, достигает индуктора 2. В примере, показанном на ФИГ. 1, датчики 4 давления располагаются в направлении B вдоль оси AX вращения индуктора 2 в, по существу, том же положении, что и передний конец входной стороны индуктора 2 и в заднем по ходу положении жидкого топлива F, отделяясь на заданное расстояние от переднего конца входной стороны индуктора 2. Датчик 4 давления может быть расположен в переднем по ходу положении жидкого топлива F, отделяясь на заданное расстояние от переднего конца выходной стороны индуктора 2. Датчик 4 давления измеряет давление вблизи индуктора 2 и передает измеренное давление в устройство 10 для диагностики.
[0018] Труба 3 обеспечена датчиком 5, который измеряет информацию об окружающей среде на интерфейсном блоке. Датчик 5, например, представляет собой датчик температуры и датчик давления. Датчик 5 расположен в заднем по ходу положении жидкого топлива F, отделенным на расстояние L от переднего конца входной стороны индуктора 2 и имеющим глубину d от внутренней поверхности трубы 3. Датчик 5 измеряет давление и температуру интерфейсного блока и передает измеренное давление и температуру в устройство 10 для диагностики. Вблизи индуктора 2 расположен расходомер (не показан), который измеряет скорость потока жидкого топлива F, и датчик вращения (не показан), который измеряет скорость вращения индуктора 2. Расходомер измеряет скорость потока жидкого топлива F и передает измеренную скорость потока в устройство 10 для диагностики. Датчик вращения измеряет скорость вращения индуктора 2 и передает измеренную скорость вращения в устройство 10 для диагностики.
[0019] ФИГ. 2 представляет собой функциональную блок-схему устройства для диагностики, включающего в себя устройство для оценки деформации согласно настоящему варианту выполнения. Устройство 10 для диагностики, показанное на ФИГ. 2, представляет собой устройство, которое диагностирует степень накопленного усталостного разрушения индуктора 2.
[0020] ФИГ. 3 представляет собой схему аппаратной конфигурации устройства для диагностики на ФИГ. 2. Как показано на ФИГ. 3, устройство 10 для диагностики может быть физически образовано как компьютер, включающий в себя один или несколько процессоров 101, запоминающее устройство 102, которое является основным запоминающим устройством, таким как запоминающее устройство с произвольным доступом (RAM) или постоянное запоминающее устройство (ROM), устройство 103 внешней памяти, такое как устройство жесткого диска, устройство 104 ввода, такое как клавиатура, устройство 105 вывода, такое как дисплей, и устройство 106 связи, которое является устройством передачи/приема данных. Каждая функция устройства 10 для диагностики, показанная на ФИГ. 2, реализуется путем загрузки одной или нескольких заданных компьютерных программ на такое оборудование, как один или несколько процессоров 101 и запоминающее устройство 102 для управления оборудованием под контролем одного или нескольких процессоров 101; и путем считывания и записи данных на запоминающее устройство 102 и вспомогательное запоминающее устройство 103. Было описано, что устройство 10 для диагностики имеет вышеуказанную аппаратную конфигурацию, но устройство 20 для оценки деформации, которое будет описано позднее, может быть образовано как компьютер, включающий в себя процессор 101, запоминающее устройство 102, вспомогательное запоминающее устройство 103, устройство 104 ввода, устройство 105 вывода и устройство 106 связи.
[0021] Возвращаясь к ФИГ. 2, описываются детали устройства 10 для диагностики. Устройство 10 для диагностики включает в себя устройство 20 для оценки деформации, блок 27 вычисления напряжения и блок 28 вычисления степени накопленного усталостного разрушения.
[0022] Устройство 20 для оценки деформации представляет собой устройство, которое оценивает деформацию индуктора 2. Устройство 20 для оценки деформация включает в себя блок 21 сбора информации о рабочей точке, блок 22 сбора данных о давлении, блок 23 удаления смещения, блок 24 оценки, блок 25 восстановления смещения и блок 26 вывода.
[0023] Блок 21 сбора информации о рабочей точке функционирует как средство для сбора информации о рабочей точке для получения информации о рабочей точке индуктора 2. Блок 21 сбора информации о рабочей точке получает в качестве информации о рабочей точке давление и температуру, измеренные датчиком 5, скорость потока, измеренную расходомером, и скорость вращения, измеренную датчиком вращения. Блок 21 сбора информации о рабочей точке выводит информацию о рабочей точке в блок 25 восстановления смещения.
[0024] Блок 22 сбора давления функционирует как средство сбора данных о давлении для получения сигнала давления {pn} (отклик давления), включающего в себя временной ряд значений давления pn в заданном положении вблизи индуктора 2. Блок 22 сбора давления проводит замер давлений, измеренных датчиком 4 давления в цикле замеров Ts, например, около 0,1 миллисекунды (мс) для получения давления в виде сигнала давления {pn}, включающего в себя временной рад значений давления pn. Блок 22 получения данных о давлении выводит сигнал давления {pn} в блок 23 удаления смещения и блок 25 восстановления смещения.
[0025] Блок 23 удаления смещения функционирует как средство удаления смещения для удаления смещения из сигнала давления {pn}. Смещение представляет собой фиксированный компонент (компонент постоянного тока), приложенный постоянно, помимо давления, измеренного датчиком 4 давления. Удаляя смещение из каждого значения давления pn сигнала давления {pn}, извлекают флуктуационный компонент (т.е. значение давления pn') значения давления pn. Блок 23 удаления смещения устанавливает, например, среднее значение значений давления pn в заданный период помимо временного ряда значений pn давления в качестве смещения. Блок 23 удаления смещения вычитает смещение из каждого значения давления pn сигнала давления {pn} и устанавливает результат вычитания в качестве каждого значения давления pn'. В результате блок 23 удаления смещения получает сигнал давления {pn'}, из которого удалено смещение. Таким образом, блок 23 удаления смещения удаляет смещение из сигнала давления {pn}. Блок 23 удаления смещения выводит сигнал давления {pn'}, из которого было удалено смещение, в блок 24 для оценки.
[0026] Блок 24 для оценки функционирует как средство оценки для оценивания на основе сигнала давления {pn'} сигнала деформации {εn'} (отклик деформации), включающего в себя временной ряд значений деформации εn', возникающей в индукторе 2. Блок 24 для оценки преобразует сигнал давления {pn'}, из которого было извлечено смещение, в сигнал деформации {εn'} при помощи фильтра оценки. Фильтр оценки представляет собой фильтр оценки многоцикловой усталостной долговечности и определяется на основе спектральной плотности мощности давления и спектральной плотности мощности деформации, возникающей в индукторе 2, при приложении давления к заданному положению, в котором обеспечен датчик 4 давления. Спектральная плотность мощности указывает распределение энергии сигнала в частотном направлении. Способ выведения фильтра оценки будет описан далее. Блок 24 для оценки выводит сигнал деформации {εn'} в блок 25 восстановления смещения.
[0027] Блок 25 восстановления смещения функционирует как средство восстановления смещения сигнала деформации {εn'}. Блок 25 восстановления смещения вычисляет смещение деформации на основе информации о рабочей точке, полученной блоком 21 получения информации о рабочей точке. Блок 25 восстановления смещения вычисляет смещение деформации при помощи, например, уравнений регрессии для скорости вращения индуктора 2, давления интерфейсного блока, температуры интерфейсного блока и скорости потока жидкого топлива F. Блок 25 восстановления смещения дополнительно может вычислять смещение деформации на основе сигнала давления {pn}. Блок 25 восстановления смещения добавляет смещение к каждому значению деформации εn' сигнала деформации {εn'} и устанавливает дополнительный результат, как значение εn каждой деформации. В результате блок 25 восстановления смещения получает сигнал деформации {εn}, в котором было извлечено смещение. Таким образом, блок 25 восстановления смещения восстанавливает смещение сигнала деформации {εn'}. Блок 25 восстановления смещения выводит сигнал деформации {εn}, в котором было извлечено смещение на блок 26 вывода.
[0028] Блок 26 вывода функционирует как средство вывода для вывода сигнала деформации {εn}. При приеме сигнала деформации {εn} из блока 25 восстановления смещения, блок 26 вывода выводит сигнал деформации {εn} на блок 27 вычисления напряжения.
[0029] Блок 27 вычисления напряжения функционирует как средство вычисления напряжения для вычисления на основе сигнала деформации {εn}, выводящегося из устройства 20 оценки деформации, сигнала напряжения {sn} (отклик напряжения), включающего в себя временной ряд значений напряжения sn, приложенного к индуктору 2. Блок 27 вычисления напряжения вычисляет каждое значение напряжения sn на основе модуля Е продольной упругости, коэффициента Пуассона ν и каждого значения деформации εn, как показано в Формуле (1). Модуль продольной упругости E равен, например, 203,0 МПа. Коэффициент Пуассона ν равен, например, 0,290.
[Формула 1]
 … (1)
… (1)
[0030] Блок 28 вычисления степени накопленного усталостного разрушения функционирует как средство вычисления степени накопленного усталостного разрушения для вычисления степени накопленного усталостного разрушения индуктора 2 на основе сигнала напряжения {sn}. Блок 28 вычисления степени накопленного усталостного разрушения разлагает сигнал напряжения {sn} в массив совокупностей амплитуды напряжения и среднего напряжения {j, sa(j), sm(j)|j ∈ {1,... Np}}, используя, например, метод «дождя». Число j совокупностей представляет собой число для идентификации каждой комбинации и является целочисленным значением 1 или более и Np или менее. Np представляет собой число предельных значений, появляющихся в целевой период времени, т.е., число вибраций. Целевой период времени представляет собой период времени, во время которого извлекают сигнал напряжения {sn}, который должен оцениваться, и равен, например, около нескольких секунд. Амплитуда напряжения sa(j) представляет собой амплитуду формы волны сигнала напряжения {sn} в целевой период времени и равна разнице между максимальным значением напряжения и минимальным значением напряжения сигнала напряжения {sn} в целевой период времени. Среднее напряжение sm(j) представляет собой центр сигнала напряжения {sn} в целевом периоде времени, и равно промежуточному значению между максимальным значением напряжения и минимальным значением напряжения сигнала напряжения {sn} в целевой период времени.
[0031] Блок 28 вычисления степени накопленного усталостного разрушения преобразует амплитуду напряжения sa(j) каждой совокупности в преобразованное напряжение ss(j) для того, чтобы приложить его к модифицированному закону Майнера по Формуле (2). Преобразованное напряжение ss(j) представляет собой напряжение, полученное путем конвертирования амплитуды sa(j) напряжения в кривую S-N. Предел прочности sb на растяжение представляет собой предел прочности на растяжение материала лопатки индуктора 2, который представляет собой фиксированное значение, заданное материалом лопатки. Предел прочности sb на растяжение равен, например, 1657,0 МПа. Коэффициент влияния надреза при усталости β равен, например 1,1.
[Формула 2]
 … (2)
… (2)
[0032] На основании кривой S-N материала индуктора 2, блок 28 вычисления степени усталостного разрушения вычисляет по Формуле (3), число циклов нагрузки до отказа Nd(j), при котором индуктор 2 разрушается, когда к индуктору 2 прикладывается только преобразованное напряжение ss(j). Константа M0 и константа M1 представляют собой константы кривой S-N.
[Формула 3]

[0033] При использовании модифицированного закона Майнера, степень D накопленного усталостного разрушения выражается Формулой (4). Блок 28 вычисления степени накопленного усталостного разрушения вычисляет степень D накопленного усталостного разрушения индуктора 2 по Формуле (4).
[Формула 4]
[0034] Блок 28 вычисления степени накопленного усталостного разрушения может вычислять степень D накопленного усталостного разрушения в единицу времени деленную на степень D накопленного усталостного разрушения за целевой период времени. Блок 28 вычисления степени накопленного усталостного разрушения выводит степень D накопленного усталостного разрушения.
[0035] Здесь описан способ получения фильтра оценки. Выполняется эксперимент, в котором тензометрический датчик прикрепляют к индуктору 2, а давление прикладывают вблизи индуктора 2 в желаемых рабочих точках (скорость потока жидкого топлива F, скорость вращения индуктора 2 и давление и температура интерфейсного блока). В этом эксперименте путем замера давления, измеренного датчиком 4 давления в цикле замера Ts, например, за время около 0,1 мс, получают сигнал давления {pn}, включающий в себя временной ряд значений давления pn. Кроме того, путем замера деформации, измеренной тензометрическим датчиком в том же самом цикле замера Ts в качестве давления получают, сигнал деформации {εn}, включающий в себя временной ряд значений деформации εn.
[0036] Разделив сигнал давления {pn} и сигнал деформации {εn} в каждое заданное время Tfft и удаляя смещение из каждого значения давления pn и каждого значения деформации εn соответствующих разделенных совокупностей, получаются комбинации значения давления и значения деформации, из каждого из которых было удалено смещение {pn', εn'|tini+Tfft × (x - 1) < tn < tini+Tfft × x}. Заметим, что выполняется x ∈ {1, 2,..., m}. В качестве смещения значения давления, например, используется скользящее среднее значений давления pn. Аналогично, в качестве смещения значения деформации, например, используется скользящее среднее значения деформации εn. Число m множеств, например, равно 40 или более.
[0037] Для каждой m-совокупности спектральная мощность плотности S1(x)(f) давления {pn'} при частоте f и спектральная мощность плотности S2(x)(f) значения деформации {εn'} при частоте f вычисляют на основе известного метода Уэлша. Затем, вычисляя квадратный корень из отношения спектральной мощности плотности S2(x)(f) к спектральной мощности плотности S1(x)(f), как показано в Формуле (5), получают усиления m {Ax~(f)|x=1, 2,..., m}. Усиления Ax~(f) представляют собой усиления для периода времени [tini+Tfft × (x - 1),tini+Tfft × x].
[Формула 5]
[0038] Затем, как показано в Формулах (6) и (7), вычисляют среднее множества μm(f) и стандартное отклонение σm(f) m-усилений Ax~(f).
[Формула 6]
[Формула 7]

[0039] Затем, как показано в Формуле (8), расчетное усиление Am,k(f) вычисляют при помощи среднего множества μm(f) и стандартного отклонения σm(f).
[Формула 8]

[0040] Далее, расчетное усиление Am,k(f) устанавливают рациональной функцией. Для установления усиления используют передаточную функцию Gs(s), показанную в Формуле (9). Параметры Ci и Di получают путем выполнения разложения на простые дроби в отношении второго выражения Формулы (9) и определяют собственной частотой угловых колебаний ωp,i, собственной частотой угловых колебаний ωz,k, коэффициентом затухания ζp,i и коэффициентом затухания ζz,k.
[Формула 9]

ωp,t: СОБСТВЕННАЯ ЧАСТОТА УГЛОВЫХ КОЛЕБАНИЙ ПОЛЮСА
ωz,k: СОБСТВЕННАЯ ЧАСТОТА УГЛОВЫХ КОЛЕБАНИЙ НУЛЕВОЙ ТОЧКИ
ζp,t: КОЭФФИЦИЕНТ ЗАТУХАНИЯ ПОЛЮСА
ζz,k: КОЭФФИЦИЕНТ ЗАТУХАНИЯ НУЛЕВОЙ ТОЧКИ
K: ФИКСИРОВАННОЕ УСИЛЕНИЕ
mp: КОЛИЧЕСТВО ПОЛЮСОВ
mz: КОЛИЧЕСТВО НУЛЕВЫХ ТОЧЕК
[0041] Когда число mp равно числу mz или более, то передаточная функция Gs(s) преобразуется по Z для получения дискретной передаточной функции Gz(z), показанной в Формуле (10). Коэффициент ai и коэффициент bk определяются совокупностью параметров фиксированного усиления K, числом mp, числом mz, коэффициентом затухания ζp,i, собственной частотой угловых колебаний ωp,i, коэффициентом затухания ζz,k и собственной частотой угловых колебаний ωz,k.
[Формула 10]
[0042] Усиление Az(f) этой дискретной передаточной функции Gz(z) выражается формой, показанной в Формуле (11). Расчетное усиление Am,k(f) устанавливают при помощи усиления Az(f). Следует заметить, что термин ʺустанавливатьʺ означает устанавливать совокупность параметров {K, mp, mz, ζp,i, ωp,i, ζz,k, ωz,k} так, чтобы минимизировать разницу между расчетным усилением Am,k(f) и усилением Az(f).
[Формула 11]

[0043] В результате вышеупомянутого установления получают коэффициент ai и коэффициент bk (i ∈ {1, 2,..., 2mp - 1, 2mp}, k ∈ {0, 1,..., 2mp - 1, 2mp}). Здесь, как показано в Формуле (12), дискретная передаточная функция Gz(z) выражается при помощи значения давления pn' и значения деформации εn' в момент времени n.
[Формула 12]

[0044] В результате, как показано в уравнении (13), определяется фильтр оценки, образующий отношение между значением деформации εn' и значением давления pn'.
[Формула 13]

[0045] Далее, со ссылкой на ФИГ. 4 и 5, описывается пример способа для диагностики, выполненного устройством 10 для диагностики. ФИГ. 4 представляет собой блок-схему, показывающую пример способа диагностики, выполненного устройством для диагностики, показанным на ФИГ. 2. ФИГ. 5 представляет собой блок-схему, показывающую детали примера обработки данных оценки деформации, показанного на ФИГ. 4. Ряд обработок данных, показанный на ФИГ. 4, запускается в момент, когда запускается работа ракеты 1.
[0046] Во-первых, устройство 20 для оценки деформации выполняет обработку данных оценки деформации (способ оценки деформации) (этап S11). В обработке данных оценки деформации на этапе S11 сначала блок 21 получения информации о рабочей точке получает информацию о рабочей точке индуктора 2, как показано на ФИГ. 5 (этап S21: этап получения информации о рабочей точке). Конкретно, блок 21 получения информации о рабочей точке получает в качестве информации о рабочей точке давление и температуру интерфейсного блока, измеренные датчиком 5, скорость потока жидкого топлива F, измеренную расходометром, и скорость вращения индуктора 2, измеренную датчиком вращения. Затем блок 21 получения информации о рабочей точке выводит информацию о рабочей точке на блок 25 восстановления смещения.
[0047] Далее, блок 22 получения данных о давлении получает сигнал {pn} давления, включающий в себя временной ряд значений давления pn в заданном положении вблизи индуктора 2 (этап S22: этап получения давления). Конкретно, блок 22 получения данных о давлении устанавливает значения давления, полученные путем замера давления, измеренного датчиком 4 давления в цикле замера Ts в виде временного ряда значений pn давления, для получения сигнала давления {pn}. Затем блок 22 получения данных о давлении выводит сигнал давления {pn} на блок 23 удаления смещения.
[0048] Далее, блок 23 удаления смещения удаляет смещение из сигнала давления {pn} (этап S23: этап удаления смещения). Например, блок 23 удаления смещения устанавливает среднее значение значений давления pn в заданный период помимо временного ряда значений давления pn в качестве смещения и вычитает смещение из каждого значения давления pn сигнала давления {pn} для удаления смещения из сигнала давления {pn}. Затем, блок 23 удаления смещения выводит сигнал давления {pn'}, из которого было удалено смещение, на блок 24 оценки.
[0049] Далее, блок 24 оценки оценивает сигнал деформации {εn'}, включающий в себя временной ряд значений деформации εn', возникающей в индукторе 2 на основе сигнала давления {pn'} (этап S24: этап оценки). Конкретно, блок 24 оценки преобразует сигнал давления {pn'}, из которого было удалено смещение, в сигнал деформации {εn'} при помощи фильтра оценки, выраженного по Формуле (13). Затем, блок 24 оценки выводит сигнал деформации {εn'} на блок 25 восстановления смещения.
[0050] Далее, блок 25 восстановления смещения восстанавливает смещение сигнала деформации {εn'} (этап S25: этап восстановления смещения). Например, блок 25 восстановления смещения вычисляет смещение деформации на основе информации о рабочей точке, полученной блоком 21 получения информации о рабочей точке, и добавляет смещение к каждому значению деформации εn' сигнала деформации {εn'} для восстановления смещения сигнала деформации {εn'}. Затем, блок 25 восстановления смещения выводит сигнал деформации {εn}, в котором было восстановлено смещение, на блок 26 вывода. Затем, блок 26 вывода выводит сигнал деформации {εn}, в котором было восстановлено смещение, на блок 27 вычисления напряжения (этап S26: этап вывода).
[0051] Далее, блок 27 вычисления напряжения вычисляет на основе сигнала {εn} деформации, выведенного из устройства 20 для оценки деформации, сигнал {sn} напряжения, включающий в себя временной ряд значений напряжения sn, приложенного к индуктору 2 (этап S12: этап вычисления напряжения). Конкретно, блок 27 вычисления напряжения вычисляет каждое значение напряжения sn на основе каждого значения деформации εn по Формуле (1) для получения сигнала напряжения {sn}. Затем, блок 27 вычисления напряжения выводит сигнал напряжения {sn} на блок 28 вычисления степени накопленного разрушения.
[0052] Далее, блок 28 вычисления степени накопленного разрушения вычисляет степень D накопленного разрушения индуктора 2 на основе сигнала напряжения {sn} (этап S13: этап вычисления степени накопленного усталостного разрушения). Сначала блок 28 вычисления степени накопленного разрушения разлагает сигнал {sn} напряжения в массив совокупностей амплитуд напряжения и среднего напряжения {j, sa(j), sm(j)|j ∈ {1,... Np}} при помощи алгоритма вычисления дождя или подобного ему. Затем, блок 28 вычисления степени накопленного разрушения преобразует амплитуду напряжения sa(j) каждой совокупности в преобразованное напряжение ss(j) по Формуле (2). Затем, блок 28 вычисления степени накопленного разрушения вычисляет по Формуле (3) число циклов нагрузки до отказа Nd(j), при котором индуктор 2 разрушается, когда только преобразованное напряжение ss(j) приложено к индуктору 2. Затем, блок 28 вычисления степени накопленного разрушения вычисляет степень D накопленного усталостного разрушения по Формуле (4). Затем, блок 28 вычисления степени накопленного разрушения выводит степень D накопленного усталостного разрушения. Таким образом завершается ряд обработок данных способа для диагностики, выполненный устройством 10 для диагностики.
[0053] Как описано выше, в устройстве 10 для диагностики, устройстве 20 для оценки деформации и способе оценки деформации, выполняемом устройством 20 для оценки деформации, сигнал давления {pn'}, включающий в себя временной ряд значений давления pn' в заданном положении вблизи индуктора 2 преобразуется в сигнал деформации {εn'}, включающий в себя временной ряд значений деформации εn', возникающей в индукторе 2 при помощи фильтра оценки. Хотя линейная корреляция между значением давления в заданном положении вблизи индуктора 2 и значением деформации, возникающей в индукторе 2, не была четко распознана, корреляция между спектральной плотностью мощности давления в заданном положении вблизи индуктора 2 и спектральной плотностью мощности деформации, возникающей в индукторе 2, была обнаружена. Таким образом, возможно преобразовать сигнал давления {pn'} в сигнал деформации {εn'}, используя фильтр оценки, определенный на основе отношения между спектральной плотностью мощности давления и спектральной плотностью мощности деформации. По этой причине, т.к. сигнал деформации {εn'} оценивают при помощи сигнала давления {pn'}, возможно получать деформацию, возникающую в индукторе 2 без использования тензометрического датчика.
[0054] Кроме того, устройство 10 для диагностики вычисляет сигнал напряжения {sn}, включающий в себя временной ряд значений напряжения sn, приложенного к индуктору 2, на основе сигнала деформации {εn}, выходящего из устройства 20 для оценки деформации, и вычисляет степень D накопленного усталостного разрушения индуктора 2 на основе сигнала напряжения {sn}. Устройство 20 для оценки деформации способно получать деформацию, возникающую в индукторе 2, и которое позволяет устройству 10 для диагностики получать степень D накопленного усталостного разрушения индуктора 2 без использования тензометрического датчика.
[0055] Кроме того, используя фильтр оценки, возможно уменьшить расчетную нагрузку для преобразования сигнала давления {pn} в сигнал деформации {εn}. Таким образом, возможно устройству 20 для оценки деформации оценивать сигнал {εn} деформации по сигналу давления {pn} в реальном времени. В результате возможно устройству 10 для диагностики вычислять степень D накопленного усталостного разрушения в реальном времени.
[0056] Кроме того, удаляя смещение из сигнала давления {pn}, возможно извлекать сигнал давления {pn'}, который представляет собой флуктуационный компонент сигнала давления {pn}. При помощи этого сигнала давления {pn'} возможно улучшать точность преобразования из сигнала давления {pn'} в сигнал деформации {εn'}. Затем, восстанавливая смещение сигнала деформации {εn'}, получают сигнал деформации {εn}, в котором было восстановлено смещение, и возможно улучшать точность оценки деформации, возникающей в индукторе 2.
[0057] Вариант выполнения настоящего изобретения был описан выше, но настоящее изобретение не ограничивается вышеуказанным вариантом выполнения. Например, диагностическая мишень не ограничена индуктором 2 турбонасоса ракеты 1, а лишь должна быть компонентом, принимающим напряжение в текучей среде. Другие примеры диагностической мишени представляют собой, например, турбинную лопатку турбонасоса космического корабля, лопатку паровой турбины, теплообменник (вибрация трубопроводов), используемый для создания ядерной энергии и индуктор обычного промышленного насоса.
[0058] Устройство 10 для диагностики дополнительно может включать блок определения, который определяет аномалию индуктора 2 на основе степени D накопленного усталостного разрушения, вычисленного блоком 28 вычисления степени усталостного разрушения. Например, блок определения сравнивает заданное пороговое значение со степенью D накопленного усталостного разрушения для определения того, является ли индуктор 2 аномальным. Конкретно, блок определения может определять, что индуктор 2 является аномальным, когда степень D накопленного усталостного разрушения больше порогового значения, и что индуктор 2 нормальный, когда степень D накопленного усталостного разрушения равна или меньше порогового значения. Блок определения может выводить результат определения, показывающий, является ли индуктор 2 аномальным или нормальным.
[0059] Кроме того, устройство 20 для оценки деформации может не включать в себя блок 23 удаления смещения и блок 25 восстановления смещения. В этом случае блок 24 оценки оценивает сигнал деформации {εn} на основе сигнала давления {pn}, полученного блоком 22 получения данных о давлении, и выводить сигнал деформации {εn} на блок 26 вывода.
Промышленная применимость
[0060] Согласно устройству для оценки деформации, устройству для диагностики и способу оценки деформации настоящего изобретения, возможно получать деформацию без использования тензометрического датчика.
Перечень ссылочных позиций
[0061]
2 Индуктор (компонент)
4 Датчик давления
10 Устройство для диагностики
20 Устройство для оценки деформации
21 Блок получения информации о рабочей точке
22 Блок получения данных о давлении
23 Блок удаления смещения
24 Блок оценки
25 Блок восстановления смещения
26 Блок вывода
27 Блок вычисления напряжения
28 Блок вычисления степени накопленного усталостного разрушения
F Жидкое топливо (текучая среда)
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ИЗМЕРЕНИЯ ДЕФОРМАЦИИ | 2023 |
|
RU2820426C1 |
| Способ контроля конструкции баллона давления из полимерного композиционного материала с металлическим лейнером и устройство для его осуществления | 2022 |
|
RU2786976C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ НЕИСПРАВНОСТИ И СПОСОБ ОПРЕДЕЛЕНИЯ НЕИСПРАВНОСТИ | 2016 |
|
RU2692946C1 |
| УСТРОЙСТВО ДЛЯ ОЦЕНКИ ОСТАТОЧНОГО СРОКА СЛУЖБЫ ПОДРЫВНОГО КОНТЕЙНЕРА, СПОСОБ ОЦЕНКИ ОСТАТОЧНОГО СРОКА СЛУЖБЫ И ПОДРЫВНОЙ КОМПЛЕКС | 2006 |
|
RU2369829C2 |
| Способ диагностики надежности и предельного ресурса эксплуатации многослойных конструкций из композитных материалов. | 2016 |
|
RU2633288C1 |
| СПОСОБ АВТОМАТИЧЕСКОЙ ОЦЕНКИ ЭЭГ АБСАНСА, КОМПЬЮТЕРНАЯ ПРОГРАММА И УСТРОЙСТВО ОЦЕНКИ ДЛЯ ЭТОГО | 2015 |
|
RU2655133C2 |
| УСТРОЙСТВО ДЛЯ ПРОГНОЗИРОВАНИЯ ОСТАТОЧНОГО РЕСУРСА ПРИ НЕРАЗРУШАЮЩЕМ КОНТРОЛЕ; ОПРЕДЕЛЕНИЯ КРУПНЫХ ПОТЕНЦИАЛЬНО ОПАСНЫХ ДЕФЕКТОВ; ВЫЯВЛЕНИЯ ЗОН ХРУПКОГО РАЗРУШЕНИЯ; ОПРЕДЕЛЕНИЯ ИЗМЕНЕНИЯ ЗОН ФАЗОВОГО СОСТАВА. | 2012 |
|
RU2511074C2 |
| УСТРОЙСТВО И СПОСОБ ОЦЕНКИ ТЕХНИЧЕСКОГО СОСТОЯНИЯ АСИНХРОННЫХ ДВИГАТЕЛЕЙ | 2019 |
|
RU2711647C1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ОЦЕНКИ РИСКА СЕРДЕЧНО-СОСУДИСТЫХ ОСЛОЖНЕНИЙ | 2012 |
|
RU2508904C1 |
| Способ и устройство оценки и прогнозирования ресурса при акустико-эмиссионной диагностике конструкций | 2022 |
|
RU2789694C1 |
Устройство для оценки деформации согласно аспекту настоящего изобретения представляет собой устройство для оценки деформации, которое оценивает деформацию компонента, обеспеченного в текучей среде, и включает в себя устройство получения данных о давлении, которое получает сигнал давления, включающий в себя временной ряд значений давления в заданном положении вблизи компонента, блок оценки, который оценивает сигнал деформации на основе сигнала давления, включающий в себя временной ряд значений деформации, возникающей в компоненте, и выводной блок, который выводит сигнал деформации. Устройство для оценки преобразует сигнал давления в сигнал деформации при помощи фильтра оценки, определенного на основе спектральной плотности мощности давления и спектральной плотности мощности деформации, возникающей в компоненте, когда к заданному положению приложено давление. Технический результат - создание устройства для оценки деформации, устройства для диагностики и способа оценки деформации, способных получать данные о деформации без использования тензометрического датчика. 4 н. и 1 з.п. ф-лы, 5 ил.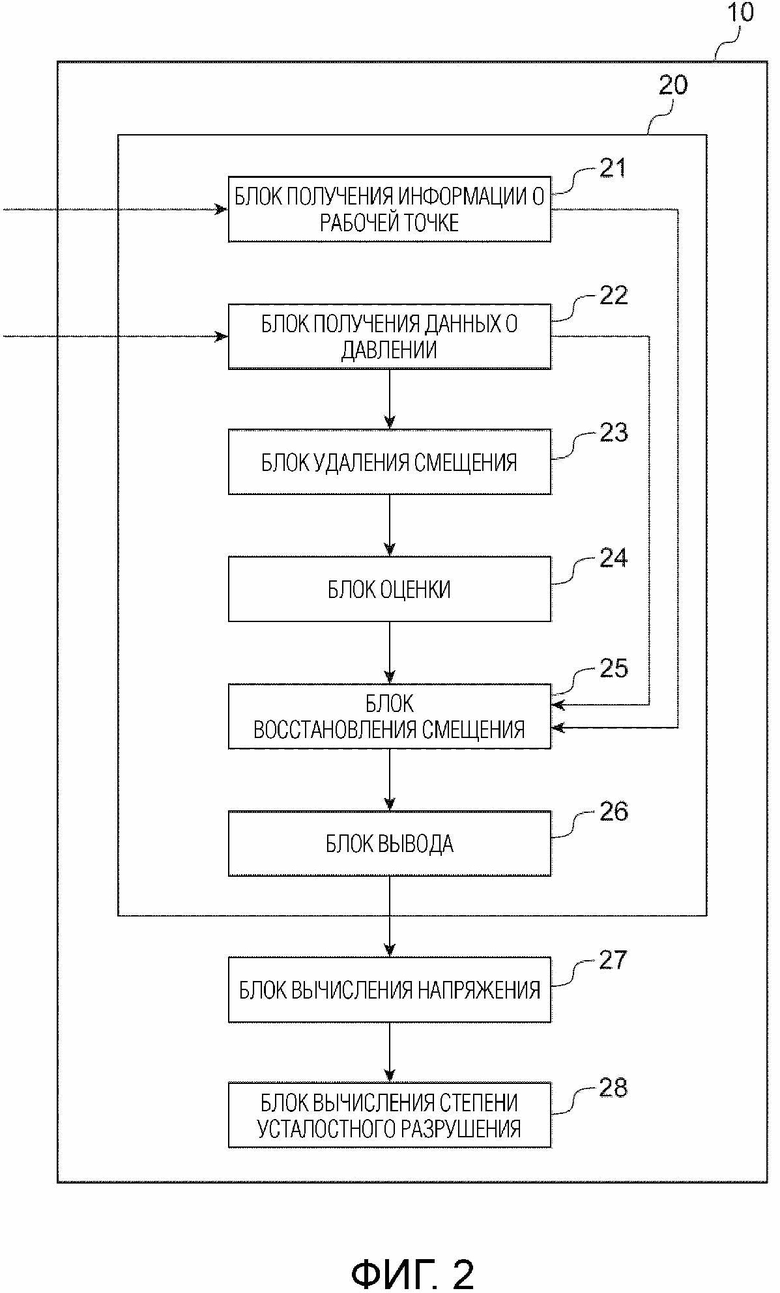
1. Устройство для оценки деформации, которое оценивает деформацию компонента, обеспеченного в текучей среде, причем устройство для оценки деформации содержит:
блок получения данных о давлении, выполненный с возможностью получения сигнала давления, включающего в себя временной ряд значений давления в заданном положении вблизи компонента;
блок оценки, выполненный с возможностью оценки, на основе сигнала давления, сигнала деформации, включающего в себя временной ряд значений деформации, возникающей в компоненте; и
блок вывода, выполненный с возможностью вывода сигнала деформации, причем
блок оценки преобразует сигнал давления в сигнал деформации при помощи фильтра оценки, определенного на основе спектральной плотности мощности давления и спектральной плотности мощности деформации, возникающей в компоненте, когда к заданному положению приложено давление.
2. Устройство для оценки деформации по п. 1, дополнительно содержащее:
блок удаления смещения, выполненный с возможностью удаления смещения из сигнала давления; и
блок восстановления смещения, выполненный с возможностью восстановления смещения сигнала деформации, причем
блок оценки преобразует сигнал давления, из которого было удалено смещение, в сигнал деформации, и
блок вывода выводит сигнал деформации, в котором было восстановлено смещение.
3. Устройство для диагностики, которое диагностирует степень накопленного усталостного разрушения компонента, причем устройство для диагностики содержит:
устройство для оценки деформации по п. 1;
блок вычисления напряжения, выполненный с возможностью вычисления на основе сигнала деформации, выведенного из устройства для оценки деформации, сигнала напряжения, включающего в себя временной ряд значений напряжения, приложенного к компоненту; и
блок вычисления степени накопленного усталостного разрушения, выполненный с возможностью вычисления степени накопленного усталостного разрушения компонента на основе сигнала напряжения.
4. Устройство для диагностики, которое диагностирует степень накопленного усталостного разрушения компонента, причем устройство для диагностики содержит:
устройство для оценки деформации по п. 2;
блок вычисления напряжения, выполненный с возможностью вычисления на основе сигнала деформации, выведенного из устройства для оценки деформации, сигнала напряжения, включающего в себя временной ряд значений напряжения, приложенного к компоненту; и
блок вычисления степени накопленного усталостного разрушения, выполненный с возможностью вычисления степени накопленного усталостного разрушения компонента на основе сигнала напряжения.
5. Способ оценки деформации, выполняемый устройством для оценки деформации, которое оценивает деформацию компонента, обеспеченного в текучей среде, причем способ оценки деформации содержит:
этап получения данных о давлении, на котором получают сигнал давления, включающий в себя временной ряд значений давления в заданном положении вблизи компонента;
этап оценки, на котором оценивают, на основе сигнала давления, сигнал деформации, включающий в себя временной ряд значений деформации, возникающей в компоненте; и
этап вывода, на котором выводят сигнал деформации, причем
сигнал давления преобразуют в сигнал деформации на этапе оценки при помощи фильтра оценки, определенного на основе спектральной плотности мощности давления и спектральной плотности мощности деформации, возникающей в компоненте, когда к заданному положению приложено давление.
| JP 62182402 A, 10.08.1987 | |||
| CN 104049036 A, 17.09.2014 | |||
| JP 2002162298 A, 07.06.2002 | |||
| JP 2013079920 A, 02.05.2013 | |||
| СПОСОБ И УСТРОЙСТВО ИЗВЛЕЧЕНИЯ ИНФОРМАЦИИ О НАПРЯЖЕННО-ДЕФОРМИРОВАННОМ СОСТОЯНИИ ГИДРОТЕХНИЧЕСКИХ СООРУЖЕНИЙ | 2004 |
|
RU2280846C1 |

