ОБЛАСТЬ ТЕХНИКИ
Изобретение относится к области машиностроения, в частности - к индивидуальным средствам передвижения.
УРОВЕНЬ ТЕХНИКИ
Известны самокаты, использующие в своей конструкции толкатели, посредством которых пользователь осуществляет свое передвижение на устройстве (патенты Германии №СН 0000112016, СН 0000100731, патент CCCP №SU 1221026).
Наиболее близким по принципу действия к описываемому ниже изобретению является транспортное средство (ТС), представленное в патенте СССР №SU 1747304. Изобретение-прототип, по сути, представляет собой велосипед без цепной передачи, педали которого, соприкасаясь нижней стороной с опорной поверхностью, по замыслу автора должны производить отталкивание ТС от точек опорной поверхности и таким образом осуществлять его перемещение в горизонтальном направлении. Однако технический результат, заявленный в изобретении-прототипе, вряд ли достижим по двум причинам. Во-первых, приложение силы здесь должно осуществляться в те моменты, когда «педаль»-толкатель оказывается в зоне мертвой точки, вследствие чего пользование данным ТС является как минимум затруднительным. Во-вторых, медианная точка соприкосновения «педали»-толкателя с опорной поверхностью находится по вертикали на одном уровне с точкой вращения «педали»-толкателя, а следовательно, вектор воздействия имеет не горизонтальную, а вертикальную направленность, в силу чего смещение ТС с места является в принципе невозможным.
Помимо того, что представленное здесь изобретение лишено вышеуказанных недостатков, оно, с точки зрения эргономичности, обладает существенным преимуществом перед самокатом традиционной конструкции, поскольку отличается от него большей степенью удобства в пользовании, требует от пользователя меньших физических усилий и позволяет преодолевать большие расстояния за счет того, что на заявленном устройстве, в отличие от традиционного самоката, отталкивание от опорной поверхности можно производить поочередно обеими ногами, часто и равномерно, как при обычной ходьбе, не испытывая при этом ни неудобства, ни усталости.
РАСКРЫТИЕ СУЩНОСТИ ИЗОБРЕТЕНИЯ
Техническая задача, на решение которой направлено заявленное изобретение, заключается в достижении возможности равномерной и частой передачи устройству импульса движения при помощи не одной, а обеих ног пользователя, путем естественных движений ногами, какие совершаются при ходьбе, без существенных физических усилий со стороны пользователя. Данный технический результат достигается благодаря тому, что дека самоката шарнирно связана с центральными частями опорных двусторонних кулис, в серединном положении располагающихся горизонтально и перпендикулярно относительно продольной оси деки самоката, которые имеют возможность совершать двунаправленные, возвратно-вращательные (в горизонтальной плоскости) и качательные (в вертикальной плоскости) движения и соседствующие концы которых шарнирно связаны с одной из двух ножных платформ-толкателей самоката; при этом, качательные движения опорных двусторонних кулис могут достигаться за счет их самостоятельного вращения или за счет осевого вращения деки самоката.
ОПИСАНИЕ ЧЕРТЕЖЕЙ
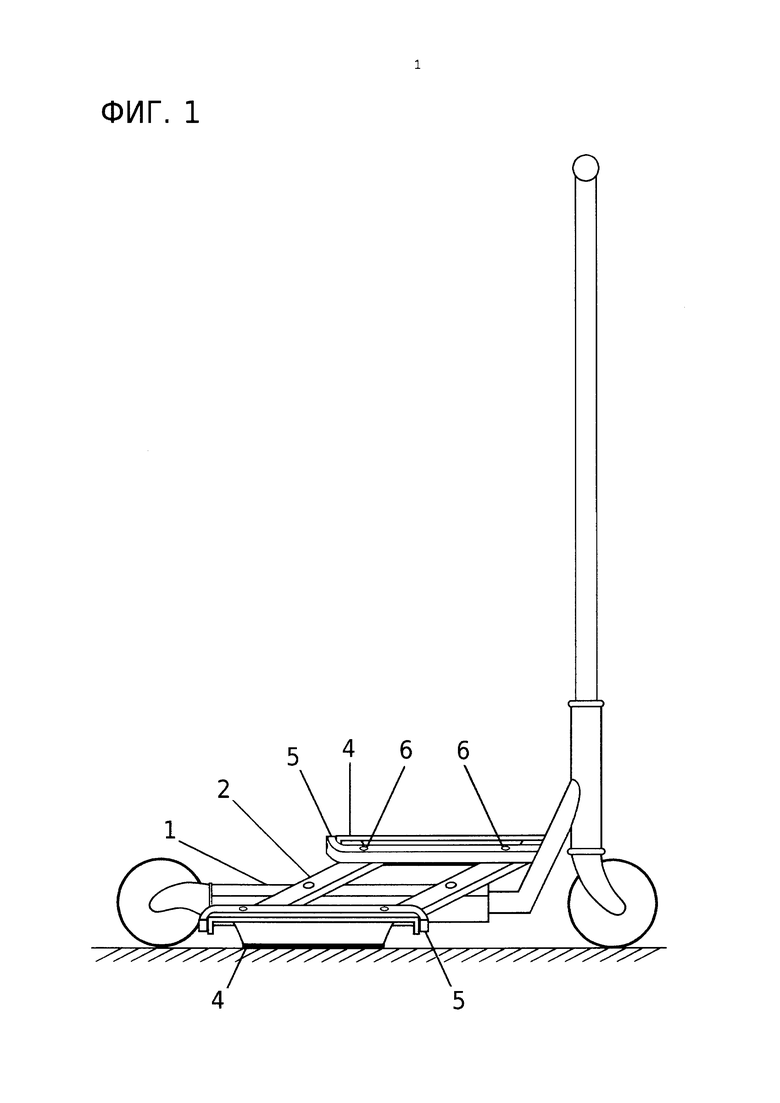
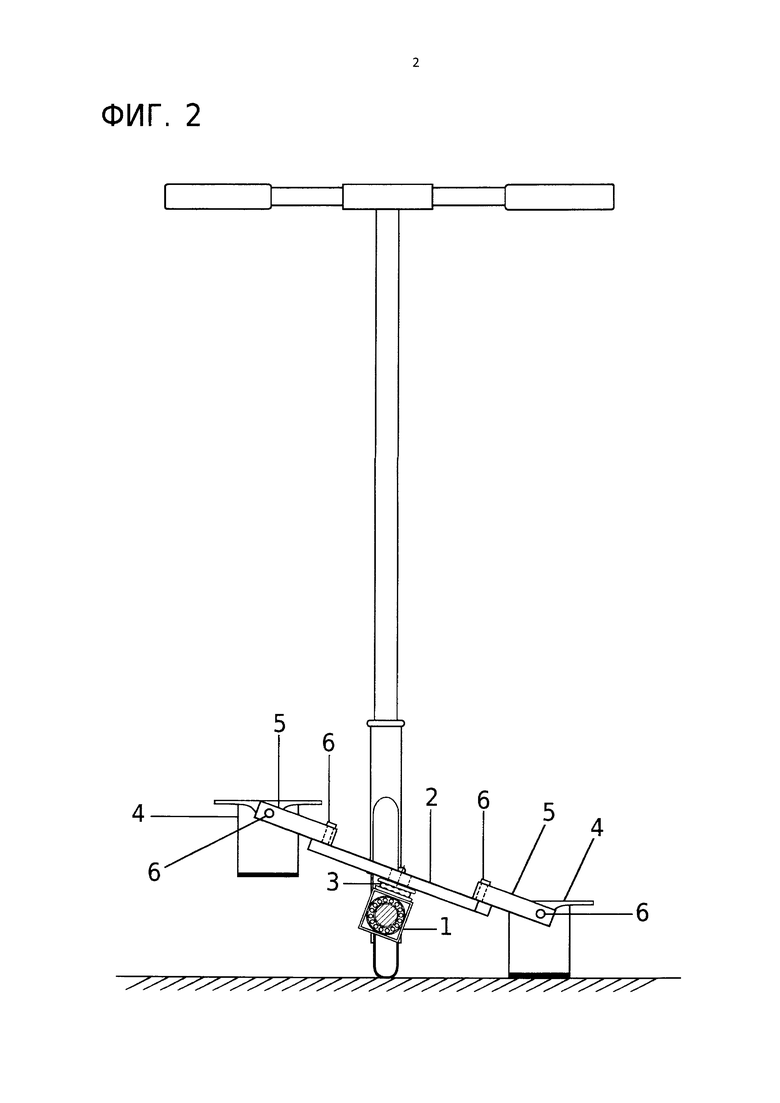
На фигурах 1, 2 и 3 представлены изображения самоката в рабочей позиции, в видах сбоку (фиг. 1), сзади в разрезе (фиг. 2) и сверху (фиг. 3).
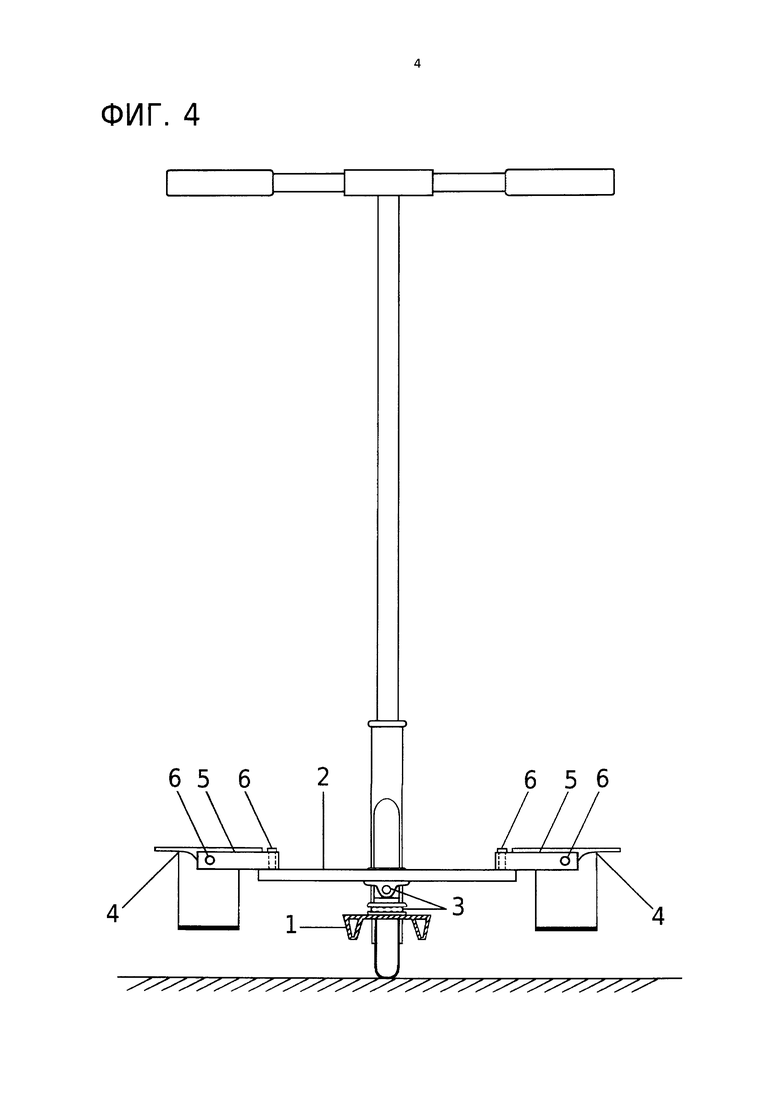
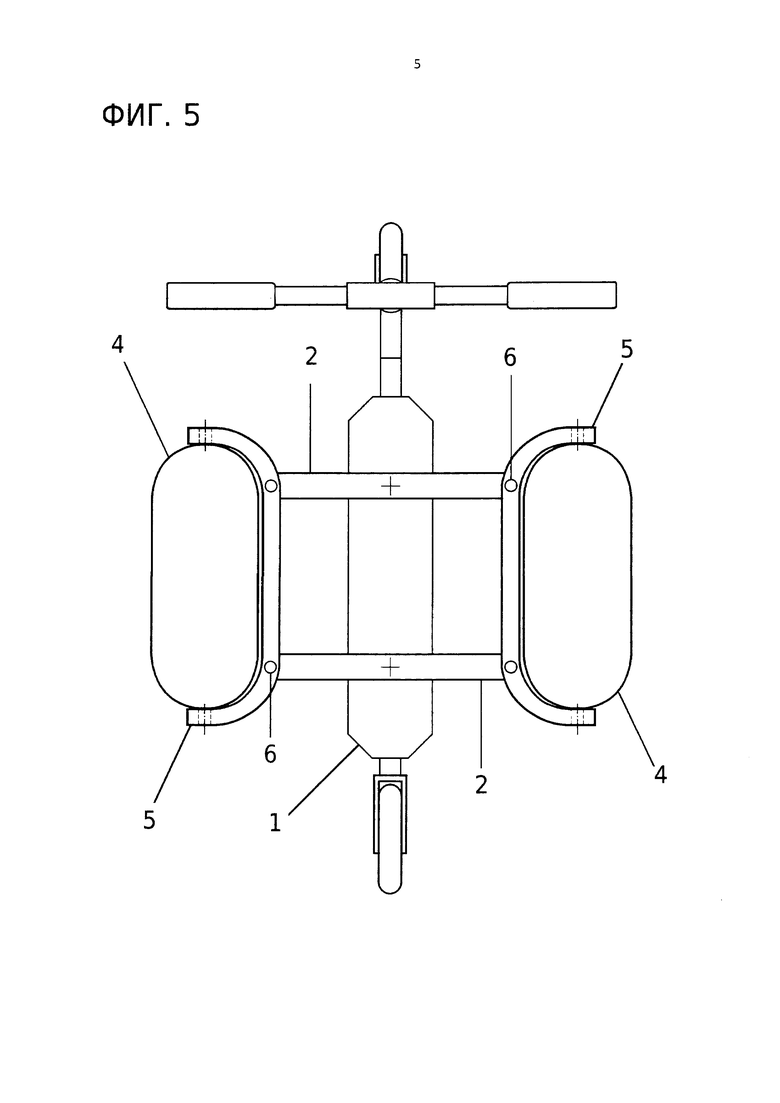
На фигурах 4 и 5 представлены изображения самоката, опорные кулисы которого находятся в серединной, нерабочей позиции, в видах сзади в разрезе (фиг. 4) и сверху (фиг. 5).
ОСУЩЕСТВЛЕНИЕ ИЗОБРЕТЕНИЯ
Конструкция устройства содержит в себе деку 1 самоката, которая в одном из вариантов осуществления изобретения имеет форму трубы с круглым или квадратным сечением и обладает возможностью совершать возвратно-вращательные движения вокруг своей центральной продольной оси. С декой самоката шарнирно связаны центральными частями не менее двух опорных двусторонних кулис 2, имеющих возможность совершать возвратно-вращательные движения в горизонтальной плоскости и качательные движения в вертикальной плоскости. Качательные движения опорных двусторонних кулис в одном варианте осуществления изобретения могут совершаться за счет осевого вращения деки, с которой шарнирно связаны опорные двусторонние кулисы (фиг. 1, фиг. 2, фиг. 3), в другом - за счет двух подвижности шарнирного соединения 3 опорных двусторонних кулис с декой самоката, дающего опорным двусторонним кулисам возможность совершать качательные движения самостоятельно (фиг. 3, фиг. 4). Соседствующие концы опорных двусторонних кулис имеют шарнирную связь с ножными платформами-толкателями 4 посредством скобообразных элементов 5, которые в средней части имеют непосредственную шарнирную связь 6 с концами опорных двусторонних кулис (оси вращения шарниров в серединном положении опорных двусторонних кулис располагаются вертикально), а по концам - с ножными платформами-толкателями (оси вращения шарниров располагаются параллельно продольной оси деки самоката).
Устройство действует следующим образом. Пользователь встает на ножные платформы-толкатели 4 и, держась руками за руль самоката, начинает перемещать центр своей тяжести с ноги на ногу, одновременно совершая шаговые движения и поочередно отталкиваясь от опорной поверхности ногами, находящимися на ножных платформах-толкателях. Опорные двусторонние кулисы 2 при этом совершают двунаправленные, возвратно-вращательные и качательные движения, а ножные платформы-толкатели поочередно соприкасаются своей нижней частью с опорной поверхностью. Благодаря тому, что в конструкции самоката предусматривается не менее двух опорных двусторонних кулис, связанные с ними шарнирной связью 6 скобообразные элементы 5 при движении сохраняют свое угловое (параллельное) положение относительно продольной оси деки 1, а рабочие поверхности ножных платформ-толкателей 4 благодаря своей шарнирной связи 6 со скобообразными элементами 5, в свою очередь, сохраняют свое параллельное положение относительно опорной поверхности, и смещаются относительно деки самоката только вверх-вниз и вперед-назад, не наклоняясь и не поворачиваясь. За счет вышеописанного взаимодействия ножных платформ-толкателей с опорной поверхностью и происходит передвижение самоката с находящимся на нем пользователем.
| название | год | авторы | номер документа |
|---|---|---|---|
| Приспособление для перемещения ручной тележки по лестничным ступеням | 2018 |
|
RU2677430C1 |
| ГРУЗОВОЙ ВЕЛОСИПЕД ПОВЫШЕННОЙ ГРУЗОПОДЪЕМНОСТИ | 1999 |
|
RU2158212C1 |
| ВИБРОДВИЖИТЕЛЬ С ПРЕОБРАЗОВАНИЕМ ВРАЩАТЕЛЬНОГО ДВИЖЕНИЯ В ПОСТУПАТЕЛЬНОЕ | 2008 |
|
RU2387567C1 |
| САМОКАТ | 2012 |
|
RU2520634C1 |
| САМОКАТ | 1991 |
|
RU2009941C1 |
| САМОКАТ | 2006 |
|
RU2329911C2 |
| УСТРОЙСТВО ДЛЯ ПОВЫШЕНИЯ ЭФФЕКТИВНОСТИ ХОДЬБЫ | 1993 |
|
RU2050885C1 |
| Станок для шлифования и полирования оптических деталей | 1987 |
|
SU1449327A1 |
| Машина для загибки деталей крой обуви по шаблонам | 1955 |
|
SU104442A2 |
| ВИБРОДВИЖИТЕЛЬ С ПРЕОБРАЗОВАНИЕМ ВРАЩАТЕЛЬНОГО ДВИЖЕНИЯ В ПОСТУПАТЕЛЬНОЕ | 2007 |
|
RU2340790C1 |

Изобретение относится к области машиностроения, в частности к самокатам. Самокат состоит из колес, деки и руля. Дека самоката шарнирно связана с центральными частями опорных двусторонних кулис. Кулисы имеют возможность совершать двунаправленные, возвратно-вращательные в горизонтальной плоскости и качательные в вертикальной плоскости движения и соседствующие концы которых шарнирно связаны с одной из двух ножных платформ-толкателей самоката. Качательные движения опорных двусторонних кулис могут достигаться за счет их самостоятельного вращения в вертикальной плоскости или за счет осевого вращения деки самоката. Достигается уменьшение трудозатрат пользователя при движении на самокате. 1 з.п. ф-лы, 5 ил.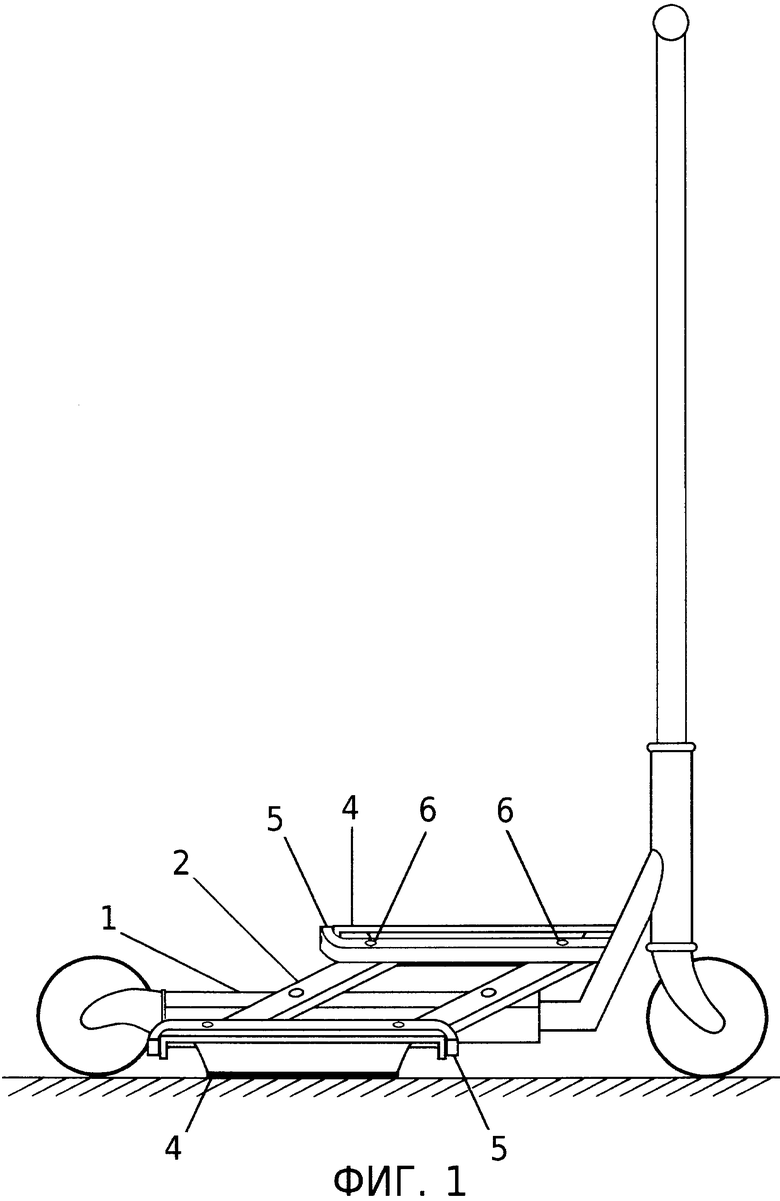
1. Самокат, состоящий из двух или более колес, деки и руля, отличающийся тем, что дека самоката шарнирно связана с центральными частями опорных двусторонних кулис, в серединном положении располагающихся горизонтально и перпендикулярно относительно продольной оси деки самоката, которые имеют возможность совершать двунаправленные, возвратно-вращательные в горизонтальной плоскости и качательные в вертикальной плоскости движения и соседствующие концы которых шарнирно связаны с одной из двух ножных платформ-толкателей самоката; при этом качательные движения опорных двусторонних кулис могут достигаться за счет их самостоятельного вращения в вертикальной плоскости или за счет осевого вращения деки самоката.
2. Самокат по п. 1, отличающийся тем, что соседствующие концы опорных двусторонних кулис связаны с одной из двух ножных платформ-толкателей самоката посредством скобообразного элемента, имеющего непосредственную шарнирную связь с соседствующими концами опорных двусторонних кулис и с ножной платформой-толкателем самоката.
| Самокат | 1984 |
|
SU1221026A1 |
| САМОПЕД | 2007 |
|
RU2373099C2 |
| US 4202423 A, 13.05.1980. | |||

