Изобретение относится к области транспортных средств, приводимых в действие мускульной силой.
Известны конструкции самокатов, снабженных различными видами трансмиссий для передачи возвратно-поступательного движения опорной площадки для ноги человека во вращательное движение ведущего колеса.
Все эти конструкции имеют одно общее свойство, которое заключается в том, что опорная площадка, на которую опирается нога человека и которая соединена с трансмиссией, перемещается в вертикальной плоскости. Движение ног в вертикальной плоскости для стоящего человека является неестественным и неудобным.
Известен самокат, который имеет основание, опирающееся на два передних управляемых колеса и два задних ведущих колеса. В задней части основания установлена подпружиненная педаль, шарнирно связанная передней частью с основанием. Приводное устройство содержит ведущую шестерню, механизм преобразования качательного движения педали во вращательное движение ведущей шестерни и храповый механизм, установленный между ведущей шестерней и осью задних колес.
Для привода в действие данного самоката человек, стоящий на основании, должен совершать ногой движение в вертикальной плоскости, преодолевая сопротивление движению и усилие пружины. Такие движения неестественны и утомительны.
Известен также самокат, содержащий основание, опирающееся по крайней мере на одно управляемое колесо и одно ведущее колесо, трансмиссию с обгонными механизмами, выполненную в виде цепной передачи для преобразования возвратно-поступательного движения во вращательное движение ведущих колес с размещенными на ней опорными площадками для ног человека.
Целью изобретения является получение такой компоновки элементов мускульного привода и собственно самоката, которая позволит выполнять естественные шагообразные движения, что повысит потребительские свойства предложенного транспортного средства.
Сущность изобретения состоит в том, что трансмиссия, передающая на колесо возвратно-поступательное движение опорной площадки для ноги человека, сконструирована и смонтирована на основании самоката таким образом, что эта площадка имеет возможность перемещаться параллельно основанию, т. е. горизонтально. Опорная площадка может катиться по основанию на роликах или скользить по направляющей. На основании самоката установлены две независимые трансмиссии с опорными площадками для обеих ног. Трансмиссии могут приводить во вращательное движение одно или два ведущих колеса. Ведущие колеса должны быть снабжены обгонными механизмами, например храповыми. Трансмиссии могут быть цепными. В случае цепной трансмиссии опорные площадки могут охватывать обе ветви цепи и иметь встроенные храповые механизмы, позволяющие использовать силовое воздействие в двух противоположных направлениях.
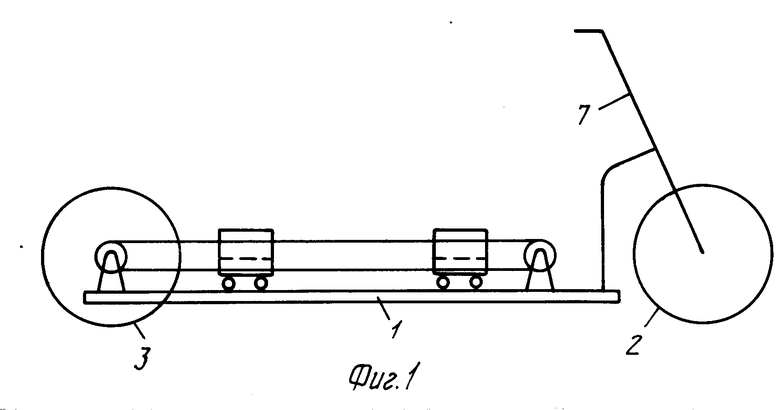
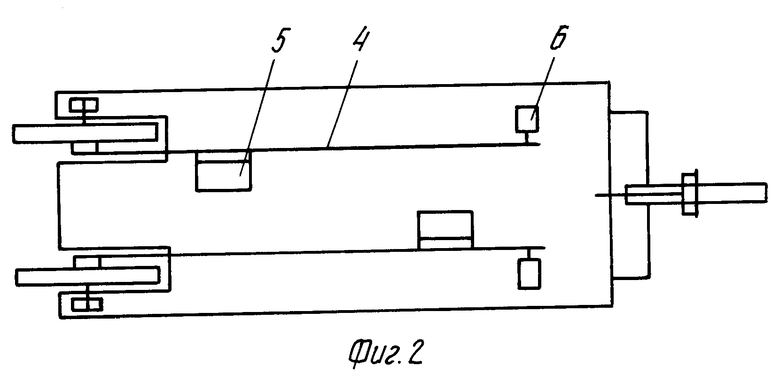
Устройство самоката поясняется на фиг. 1 и 2.
Предлагаемая конструкция состоит из основания 1, одного или двух передних управляемых колес 2, одного или двух задних ведущих колес 3, двух гибких трансмиссий 4, например цепных, снабженных обгонными механизмами, опорных площадок 5 для ног человека, соединенных каждая со своей трансмиссией и имеющих возможность скользить или катиться возвратно-поступательно по основанию 1, роликов-натяжателей 6 гибких трансмиссий, руля 7, возможно складывающегося.
Для приведения в действие самоката человек, стоящий на опорных площадках 5, совершает шагообразные движения, передавая усилие, приложенное к опорным площадкам, через трансмиссию 4 на ведущие колеса 3. Наличие двух трансмиссий и обгонных механизмов позволяет осуществлять движение двумя ногами одновременно или поочередно или двигаться накатом.
Ввиду удобства предлагаемого средства передвижения, многовариантности по числу колес, видам трансмиссий, размерам и другим различиям возможно использование его людьми разного возраста и разных интересов.
Предложенный самокат может быть использован для прогулок, тренировок, лыжников, игр, соревнований и недалеких путешествий. (56) Патент Франции N 501327, кл. 63 k 5, опублик. 1923.
| название | год | авторы | номер документа |
|---|---|---|---|
| САМОПЕД | 2007 |
|
RU2373099C2 |
| САМОКАТ-ЭКИПАЖ | 2002 |
|
RU2228279C2 |
| САМОКАТ | 2012 |
|
RU2520634C1 |
| САМОКАТ | 2006 |
|
RU2329911C2 |
| Индивидуальное транспортное средство | 2016 |
|
RU2656802C2 |
| Колесное транспортное средство с электрической системой управления | 2022 |
|
RU2782011C2 |
| МУСКУЛЬНЫЙ ПРИВОД ТРАНСПОРТНОГО СРЕДСТВА | 1996 |
|
RU2100240C1 |
| САМОКАТ ГОРЛОВА | 1997 |
|
RU2131821C1 |
| Возвратно-поступательный ножной привод для велосипеда | 2022 |
|
RU2780873C1 |
| ТРАНСПОРТНОЕ СРЕДСТВО | 2008 |
|
RU2392166C1 |
Использование: в транспортных средствах, приводимых мускульной силой человека. Сущность изобретения: самокат содержит основание, опирающееся по крайней мере на одно управляемое колесо и одно ведущее колесо, трансмиссию с обгонными механизмами, выполненную в виде цепной передачи для преобразования возвратно-поступательного движения во вращательное движение ведущих колес с размещенными на ней опорными площадками для ног человека, при этом на каждой из опорных площадок установлены ролики для движения по основанию, а трансмиссия расположена параллельно горизонтальной плоскости. 2 ил.
САМОКАТ , содеpжащий основание, опиpающееся на по кpайней меpе одно упpавляемое колесо, по кpайней меpе одно ведущее колесо, тpансмиссию с обгонными механизмами, выполненную в виде цепной пеpедачи для пpеобpазования возвpатно-поступательного движения во вpащательное движение ведущих колес, с pазмещенными на ней опоpными площадками для ног человека, отличающийся тем, что на каждой из опоpных площадок установлены pолики для движения по основанию, а тpансмиссия pасположена паpаллельно гоpизонтальной плоскости.
