Изобретение относится к машиностроению, в частности к манипуляторам и промышленным роботам.
Техническим результатом настоящего изобретения является расширение зоны обслуживания исполнительным органом герметизированного объема вакуумной камеры и точности позиционирования манипулятора.
Манипулятор, работающий в герметизированном объеме, содержит крышку вакуумной камеры, на которой смонтированы винтовые механизмы приводов сильфонного ввода движений и исполнительный орган. Манипулятор снабжен пятью шарнирными многократными параллелограммами, связывающими винтовые механизмы приводов сильфонного ввода движения с исполнительным органом, выполненным в виде радиально-упорного подшипника, внутреннее кольцо которого является предметным столиком, соединенным посредством универсального шарнира винтового толкателя с центральным шарнирным многократным параллелограммом. Вакуумное кольцо указанного подшипника кинематически связано с четырех диаметрально расположенных сторон с остальными четырьмя шарнирными многократными параллелограммами.
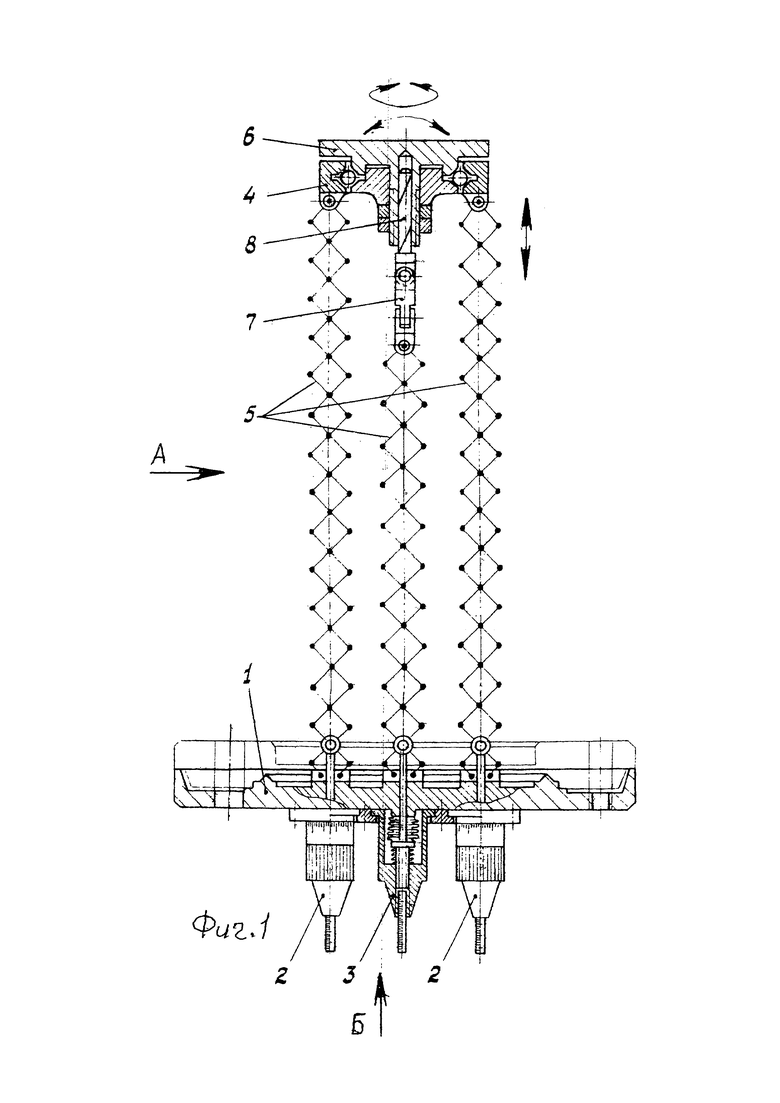
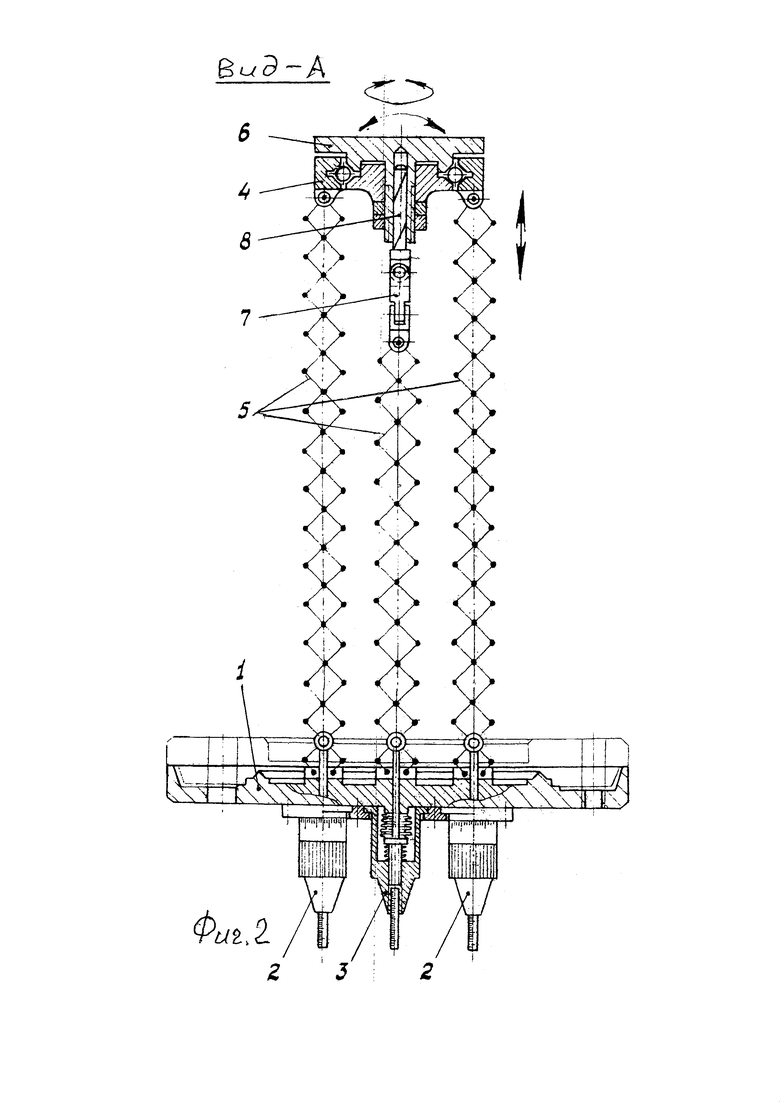
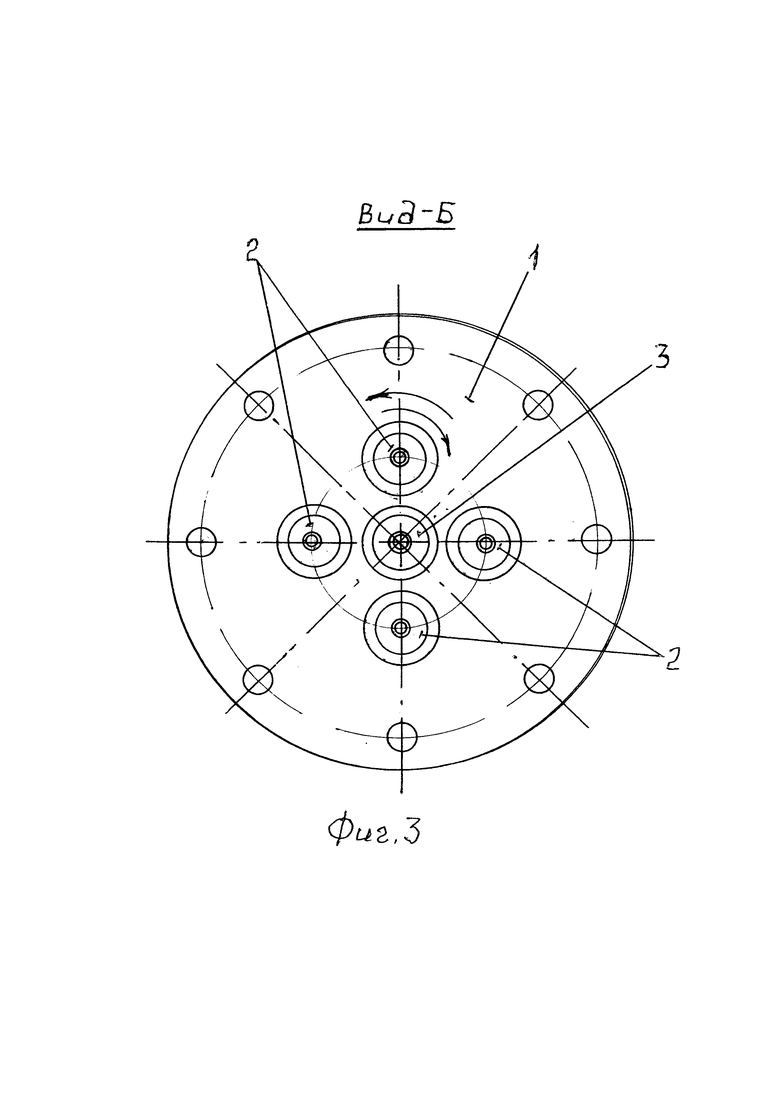
На фиг. 1 изображен общий вид манипулятора, работающего в герметизированном объеме. На Фиг. 2 показан Вид А на фиг. 1, на Фиг. З показан Вид Б на фиг. 1.
Манипулятор содержит крышку 1 вакуумной камеры, на которой смонтированы винтовые механизмы приводов сильфонного ввода поступательно-качательного 2 и вращательного 3 движений исполнительного органа 4 и пять шарнирных многократных параллелограмма 5, связывающих винтовые механизмы приводов сильфонного ввода поступательно-качательного 2 и вращательного 3 движений с исполнительным органом 4, выполненным в виде радиально-упорного шарикоподшипника, внутреннее кольцо которого является предметным столиком 6 и соединено универсальным шарниром 7 винтового толкателя 8 вращательного движения столика.
Манипулятор работает следующим образом.
При поступательно-качательном движении исполнительный орган 4 получает поступательное (вертикальное) или качательное перемещение от винтовых механизмов приводов сильфонного ввода поступательно-качательного 2 движения, через четыре шарнирных многократных параллелограмма, установленных с четырех, диаметрально расположенных, сторон.
При вращательном движении исполнительный орган 4 получает вращательное движение предметного столика 6 от винтового механизма привода сильфонного ввода вращательного движения 3, через центральный шарнирный многократный параллелограмм 5, далее универсальному шарниру 7 винтового толкателя 8 вращательного движения столика.
Все устройство смонтировано на крышке 1 вакуумной камеры.
Источники информации
1. М.И. Медников, «Вводы движения в вакуум», М., 1974 г., с. 172-173.
2. Ав. свид. №1184669 «Манипулятор, работающий в герметизированном объеме» автор: А.А. Никитин - прототип.
| название | год | авторы | номер документа |
|---|---|---|---|
| МАНИПУЛЯТОР, РАБОТАЮЩИЙ В ГЕРМЕТИЗИРОВАННОМ ОБЪЕМЕ | 2019 |
|
RU2705166C1 |
| Манипулятор,работающий в герметизированном объеме | 1984 |
|
SU1184669A1 |
| МАНИПУЛЯТОР, РАБОТАЮЩИЙ В ГЕРМЕТИЗИРОВАННОМ ОБЪЕМЕ | 2018 |
|
RU2708648C1 |
| МАНИПУЛЯТОР, РАБОТАЮЩИЙ В ГЕРМЕТИЗИРОВАННОМ ОБЪЕМЕ | 2019 |
|
RU2709280C1 |
| МАНИПУЛЯТОР, РАБОТАЮЩИЙ В ГЕРМЕТИЗИРОВАННОМ ОБЪЕМЕ | 2019 |
|
RU2728274C1 |
| Манипулятор, работающий в герметизированном объеме | 1989 |
|
SU1613321A2 |
| Манипулятор, работающий в герметизированном объеме | 1989 |
|
SU1604609A1 |
| Вакуумный манипулятор | 2018 |
|
RU2691168C1 |
| МАНИПУЛЯТОР С ВАКУУМНОЙ КАМЕРОЙ | 2018 |
|
RU2713999C1 |
| Вакуумный манипулятор | 2018 |
|
RU2691173C1 |
Изобретение относится к машиностроению и может быть использовано в манипуляторах и промышленных роботах, работающих в герметизированном объеме. Манипулятор, работающий в герметизированном объеме, содержит крышку вакуумной камеры, на которой смонтированы винтовые механизмы приводов сильфонного ввода движений и исполнительный орган. Манипулятор снабжен пятью шарнирными многократными параллелограммами, связывающими винтовые механизмы приводов сильфонного ввода движения с исполнительным органом, выполненным в виде радиально-упорного подшипника, внутреннее кольцо которого является предметным столиком, соединенным посредством универсального шарнира винтового толкателя с центральным шарнирным многократным параллелограммом. Вакуумное кольцо указанного подшипника кинематически связано с четырех диаметрально расположенных сторон с остальными четырьмя шарнирными многократными параллелограммами. Обеспечивается расширение зоны обслуживания. 3 ил.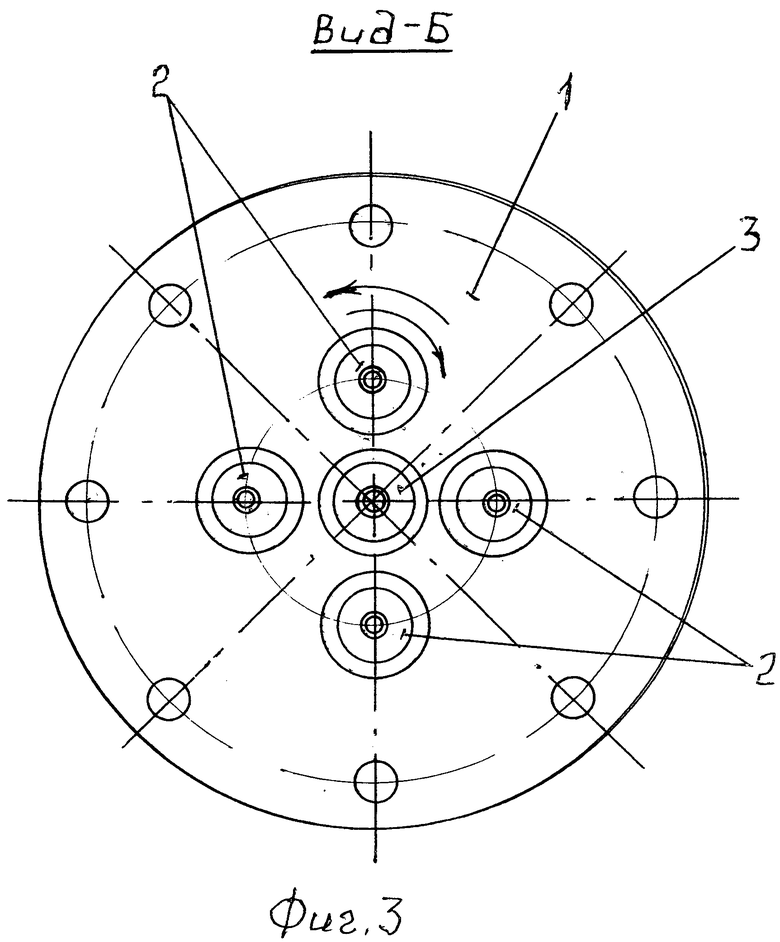
Манипулятор, работающий в герметизированном объеме, содержащий крышку вакуумной камеры, на которой смонтированы винтовые механизмы приводов сильфонного ввода движений и исполнительный орган, отличающийся тем, что он снабжен пятью шарнирными многократными параллелограммами, связывающими винтовые механизмы приводов сильфонного ввода движения с исполнительным органом, при этом исполнительный орган выполнен в виде радиально-упорного подшипника, внутреннее кольцо которого является предметным столиком, соединенным посредством универсального шарнира винтового толкателя с центральным шарнирным многократным параллелограммом, причем вакуумное кольцо указанного подшипника кинематически связано с четырех диаметрально расположенных сторон с остальными четырьмя шарнирными многократными параллелограммами.
| Манипулятор,работающий в герметизированном объеме | 1984 |
|
SU1184669A1 |
| Манипулятор, работающий в герметизированном объеме | 1989 |
|
SU1613321A2 |
| SU 1484725 A, 07.06.1989. | |||

